Область техники, к которой относится изобретение
Настоящее изобретение относится к контролю работы тормоза, в частности, контролю работы электромагнитного тормоза.
Уровень техники
Тормоза, которые используются в грузоподъемных устройствах, важны для работы грузоподъемного механизма, как в отношении экономии, так и безопасности. Неисправность тормоза может привести к падению груза, в силу чего могут быть повреждены другие узлы грузоподъемного механизма, и есть риск травмирования работающих вблизи людей.
Тормоза, которые используются в грузоподъемных механизмах, представляют собой обычные дисковые тормоза, в которых фрикционный материал в виде дисков, вращающийся вместе с осью мотора, зажимается между опорным диском и фрикционным диском, в силу чего происходит торможение.
При торможении фрикционная поверхность изнашивается. Если фрикционная поверхность изнашивается, то тормозной эффект тормоза снижается существенным образом, и тормоз не может больше работать соответственно расчетным параметрам. Таким образом, тормоз выходит из строя.
Состояние тормоза обычно контролируют вручную путем измерения толщины фрикционной поверхности посредством штангенциркуля. То есть, чтобы иметь возможность измерить фрикционную поверхность, может оказаться необходимым снять кожух тормоза, а после измерения и возможного технического обслуживания тормоза - снова закрыть кожух. Таким образом, контроль тормозов связан с ручной работой, которая требует затрат времени и сопряжена с ошибками. Кроме того, в грузоподъемных механизмах, в которых тормоз расположен на большой высоте, например, в портовых кранах, есть опасность падения обслуживающего персонала, и, если принять во внимание этот фактор, то время, необходимое для выполнения технического обслуживания, дополнительно увеличивается.
Во время проверки тормоза грузоподъемного механизма производственное оборудование, на котором установлен тормоз, невозможно использовать для стандартного выполнения работы. Тогда, например, портовый кран, когда на нем производят обслуживание тормоза, простаивает пока идет проверка. Однако, с точки зрения экономики, простой дорогостоящего оборудования подобного портовому крану должен случаться как можно реже, и должен занимать как можно меньше времени. Поэтому желательно, чтобы перерывы в работе производственных машин были как можно более короткими. Путем создания программы производственных перерывов можно сократить время простоев, поскольку работы по техническому обслуживанию могут быть лучше спланированы.
С точки зрения техники безопасности износ тормоза грузоподъемного механизма создает опасность увеличения вероятности отказа тормоза, что может приводить к экономическим потерям, если происходит поломка грузоподъемного механизма или его узлов, или причинение увечий персоналу, который находится вблизи грузоподъемного механизма, или же нанесение повреждений производственной линии или иной собственности. Например, если тормоз не схватывает, то может произойти падение груза или грузоподъемного механизма. Или, например, если тормоз не отпускает, то мотор грузоподъемного механизма может начать работать против тормоза, тормоз может перегреться и даже взорваться. «Работа против тормоза» - это ситуация работы мотора, когда тормоз находится во включенном состоянии, хотя в норме мотор должен быть выключен, когда тормоз включен. Работа против тормоза может иметь место и при нормальном использовании тормоза, когда мотор продолжает работать, после того как тормоз был включен.
В грузоподъемных механизмах обычно используются несколько тормозов, чтобы останавливать груз, с которым производится работа, и для удержания груза на месте. В грузоподъемных механизмах перемещение груза можно производить во многих разных направлениях. К примеру, в портовых кранах могут производить подъем или опускание контейнера с использованием четырех тросов, которые соединены с углами контейнера. Торможение мотора каждого троса могут производить отдельно, что означает, что необходимое число тормозов, соответствующих указанным моторам, равно, например, четырем. В другом примере, в мостовом кране перемещение груза осуществляют посредством тележки, моста и лебедки в тех направлениях, которые позволяют указанные механизмы. Таким образом, безопасное перемещение груза в грузоподъемных механизмах может потребовать, чтобы исправными были несколько тормозов, которые отвечают за перемещение груза. Техническое обслуживание нескольких тормозов - это трудная задача, что вызвано числом тормозов в грузоподъемном механизме и/или размерами грузоподъемного механизма. Трудность технического обслуживания дополнительно возрастает из-за различий между тормозами, которые можно объяснить различными моделями тормозов, когда они выпущены разными производителями, или, например, отличиями моделей одного производителя. Как правило, тормоза одного и того же производителя могут отличаться друг от друга по размеру и/или питающему напряжению.
Раскрытие изобретения
Таким образом, задачей изобретения является создание способа, устройства, компьютерного программного продукта и системы для решения вышеупомянутых проблем. Решение задачи изобретения достигается способом, устройством, компьютерным программным продуктом и системой, отличающимися теми признаками, которые сформулированы в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
В соответствии с первым аспектом изобретения, предлагается способ контроля тормоза, содержащего первую и вторую тормозные поверхности, и намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное расцепленное, при котором тормозные поверхности отделены друг от друга, способ содержит: определение электрического тока тормоза, когда тормозные поверхности начинают перемещение из сцепленного состояния в расцепленное состояние, определение максимального электрического тока в намагничивающих средствах тормоза при сцепленном состоянии тормозных поверхностей и определение состояния тормоза в виде токового отношения - отношения тока, измеренного, когда тормозные поверхности начинают перемещение, к указанному максимальному электрическому току.
В соответствии со вторым аспектом изобретения, предлагается устройство для контроля электромагнитного тормоза, содержащего первую и вторую тормозные поверхности, и намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности отделены друг от друга, при этом устройство выполнено с возможностью определения электрического тока тормоза, когда тормозные поверхности начинают перемещение из сцепленного состояния в расцепленное состояние, определения максимального электрического тока в намагничивающих средствах тормоза при расцепленном состоянии тормозных поверхностей и определения состояния тормоза в виде токового отношения - отношения тока, измеренного, когда тормозные поверхности начинают перемещение, к указанному максимальному электрическому току.
В соответствии с третьим аспектом изобретения, предусматривается компьютерный программный продукт, содержащий программные инструкции для исполнения устройством способа, соответствующего первому аспекту изобретения, когда указанный программный продукт загружен в устройство.
В соответствии с четвертым аспектом изобретения, предлагается устройство, содержащее средства для осуществления способа, соответствующего любому из аспектов изобретения.
В соответствии с пятым аспектом изобретения, предлагается система, содержащая устройство, соответствующее любому из аспектов изобретения.
В соответствии с шестым аспектом изобретения, предлагается способ модернизации грузоподъемного устройства, которое имеет в своем составе электромагнитный тормоз, содержащий первую и вторую тормозные поверхности, и намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности отделены друг от друга, способ содержит установку устройства, соответствующего любому из аспектов изобретения, применительно к электромагнитному тормозу.
Некоторые варианты осуществления изобретения могут облегчить контроль нескольких различных тормозов, и определение их состояния и/или необходимости технического обслуживания. Одно и то же значение порога токового отношения может быть задано для различных тормозов, что упрощает контроль нескольких различных тормозов. Таким образом, устройства, в которых используются разные тормоза, можно поддерживать в рабочем состоянии в течение более длительного времени, что также означает экономию затрат на техническое обслуживание. Другие преимущества и полезные качества изобретения будут раскрыты в последующем описании, в котором различные варианты осуществления изобретения рассмотрены более подробно.
Краткое описание чертежей
Ниже изобретение будет описано более подробно на примерах предпочтительных вариантов осуществления и со ссылками на прилагаемые чертежи, из которых:
фиг. 1 представляет собой покомпонентное изображение тормоза, который установлен на моторе грузоподъемного устройства, и контроль которого может быть осуществлен в соответствии с представленными вариантами осуществления изобретения,
Фиг. 2а и 2b изображают тормоз, соответствующий варианту осуществления, в его различных состояниях,
Фиг. 3а и 3b изображают устройства для контроля состояния тормоза, соответствующие некоторым вариантам осуществления,
Фиг. 4а изображает грузоподъемное устройство с электромагнитным тормозом, контроль которого осуществляют в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4b изображает грузоподъемное устройство с электромагнитным тормозом, контроль которого осуществляют в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 5 изображает блок-схему операций для осуществления контроля тормоза,
Фиг. 6 изображает блок-схему алгоритма способа для осуществления контроля состояния тормоза в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 7а представляет кривые различных электрических токов, измеренных в намагничивающих средствах электромагнитного тормоза, в функции времени, а также кривые производных по времени от измеренных электрических токов в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 7b иллюстрирует состояние электромагнитного тормоза посредством кривых электрического тока, измеренного в намагничивающих средствах электромагнитного тормоза, а также токовые отношения, рассчитанные для данного тормоза.
Фиг. 7с демонстрирует изменение токового отношения тормоза в функции времени, по результатам измерения для двух различных тормозов в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 8а изображает кривую электрического тока, измеренного в намагничивающих средствах электромагнитного тормоза, когда ток в намагничивающие средства подается от схемы с токовым бустером.
Фиг.8b изображает схему источника питания электромагнитного тормоза с токовым бустером.
Фиг. 9 иллюстрирует изменение уровня максимального тока тормоза в зависимости от температуры.
Фиг. 10 демонстрирует отклонение токов отпускания тормоза при нормально действующем тормозе.
Фиг. 10b демонстрирует отклонение токов отпускания тормоза при неисправном тормозе.
Осуществление изобретения
Ниже следует описание контроля тормоза. Благодаря контролю состояния тормоза можно получить информацию о состоянии тормоза. Таким образом, работы по техническому обслуживанию тормоза можно планировать, прежде чем возникнет неисправность тормоза и выход его их строя.
Изобретение особенно подходит для применения при контроле состояния электромагнитных дисковых тормозов. Согласно изобретению, возможно осуществление жестко установленного способа и устройства, и на этой основе возможно создание переносного устройства контроля, например, для персонала технического обслуживания. Изобретение позволяет осуществлять индикацию износа и/или неисправности тормоза.
Когда обнаружено, что тормоз находится в изношенном состоянии, в отношении тормоза может быть применено техническое обслуживание по состоянию. Техническое обслуживание по состоянию - это способ обслуживания, основанный на фактическом состоянии устройства. Мерой состояния устройства или его компонента являются переменные величины, которые изменяются по мере износа деталей. Для измеряемых переменных определяют границы, в пределах которых устройство работает надлежащим образом, а когда происходит превышение предела, должно быть произведено обслуживание или замена деталей.
В последующем описании термин «токовое отношение» касается отношения электрических токов в намагничивающих средствах электромагнитного тормоза, измеренных в различные моменты времени. Электрический ток может быть измерен, когда тормозные поверхности начинают перемещение от их полностью сцепленного состояния к расцепленному состоянию, и далее к максимуму электрического тока в намагничивающих средствах при расцепленном состоянии. Токовое отношение получают, когда начинается премещение, из отношения измеренного электрического тока к максимальному электрическому току.
На фиг. 1 представлено покомпонентное изображение электромагнитного тормоза, который установлен на моторе грузоподъемного механизма, и который можно контролировать в соответствии с вариантами осуществления настоящего изобретения. На фиг.1 изображен мотор 102, торможение которого можно осуществлять посредством установленного на нем механизма тормоза. Механизм тормоза содержит тормозной диск 106, фрикционный диск 104 и корпус 108 тормоза. К корпусу 108 тормоза прикреплен опорный диск 112, например, при помощи винтов 114. Механизм тормоза также содержит вентилятор 116 и корпус 118 вентилятора. Механизм тормоза может быть установлен на моторе 102, на оси 103 мотора. Корпус тормоза может выступать, чтобы обеспечить защиту как вентилятору, так и механизму тормоза.
В типичном электромагнитном тормозе фрикционный диск служит в качестве встречной детали, когда происходит смыкание тормоза. Перемещение фрикционного диска при использовании тормоза небольшое, или же перемещение фрикционного диска вообще отсутствует. Тормозной диск содержит фрикционные поверхности, и соединен с осью мотора. Таким образом, тормозной диск вращается вместе с осью мотора, когда тормоз находится в расцепленном состоянии, и не дает оси вращаться, когда тормоз находится в сцепленном состоянии. При вышеописанной типичной работе предполагается, что тормоз исправен и действует без проблем.
Опорный диск тормоза расположен вплотную к корпусу тормоза. Когда тормоз находится в сцепленном состоянии, пружины поджимают опорный диск к тормозному диску и фрикционному диску. Тормоз отпускает, когда сила подтягивает опорный диск к корпусу тормоза, и тем самым тормозной диск получает возможность свободно вращаться в расцепленном состоянии.
Когда тормоз устанавливают на ось мотора, по меньшей мере одна из тормозных поверхностей тормоза, например, тормозной диск, может быть установлена с возможностью вращения вместе с осью мотора. При осуществлении торможения посредством тормоза фиг. 1 тормозные поверхности прижимаются друг к другу, и тем самым тормозной диск 106 зажимается между фрикционным диском 104 и опорным диском 112. Усилие сжатия может быть создано пружинами, например, как показано - пружинами 214 и 216 на фиг. 2а и 2b.
Фиг. 2а и 2b изображают тормоз, соответствующий варианту осуществления изобретения, в разных состояниях. Состояния тормоза могут быть определены по состояниям его тормозных поверхностей. Фиг. 2а изображает тормоз, соответствующий варианту осуществления изобретения, в отпущенном состоянии. Фиг. 2b изображает тормоз в сцепленном состоянии, соответствующий варианту осуществления изобретения.
Различные состояния тормоза будут описаны далее со ссылками на фиг. 2а и 2b, на которых тормоз содержит первую тормозную поверхность 202, 204 и вторую тормозную поверхность 206, 204, а также намагничивающие средства 210, которые, в ответ на подаваемый в них электрический ток, создают магнитное поле для перемещения тормозных поверхностей из сцепленного состояния, при котором указанные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности 202, 204, 206 отделены друг от друга. Когда тормозные поверхности находятся в магнитном поле, созданном намагничивающими средствами, к указанным поверхностям приложена сила, направленная так, чтобы оттянуть тормозные поверхности в расцепленное положение. Тогда тормозные поверхности оказываются расцепленными, как на фиг. 2а. Когда тормозные поверхности находятся в сцепленном состоянии, как на фиг. 2b, намагничивающие средства не создают магнитного поля, и тормозные поверхности поджимаются друг к другу.
Намагничивающие средства 210 могут содержать катушку или, например, некоторые другие устройства, которые создают магнитное поле, когда в них подают электрический ток, например, постоянный ток. Намагничивающие средства могут быть установлены на несущей конструкции 208, которая может представлять собой, например, корпус 108 тормоза, как на фиг. 1.
Пружины 214 и 216 прикреплены к тормозной поверхности 206, чтобы толкать тормозную поверхность 206 в направлении тормозных поверхностей 202 и 204, и тем самым поджимать указанные поверхности друг к другу, когда ток не подается в намагничивающие средства, и отсутствует магнитное поле, которое могут создавать намагничивающие средства.
На фиг. 2а электрический ток подают в намагничивающие средства, и они создают магнитное поле, которое воздействует на тормозные поверхности с силой, оказывающей сопротивление силе пружин 214 и 216, и таким образом удерживает тормозные поверхности раздельно друг от друга. Тогда тормозная поверхность 206 находится на расстоянии г от несущей конструкции 208. Пружины 214 и 216 могут быть встроены в несущую конструкцию 208, при этом тормозная поверхность 206 может перемещаться и вставать впритык к несущей конструкции 208. При расцепленном состоянии тормозная поверхность 206 прилегает к несущей конструкции, например, к корпусу тормоза. Расстояние r от тормозной поверхности 206 до несущей конструкции может быть сделано сколь угодно малым, r=0.
На фиг. 2b электрический ток не подают в намагничивающие средства, поэтому они не создают магнитного поля, которое могло бы оттянуть тормозные поверхности друг от друга и разделить их. Тогда тормозные поверхности 206, 204, 202 сжаты вместе силой пружин 214 и 216, и образован воздушный зазор b между тормозными поверхностями и несущей конструкцией 208 от опорного диска 206 до корпуса тормоза. Типичный воздушный зазор b составляет от 0,4 до 1,2 мм. В этом случае тормоз работает, как требуется, то есть тормозящий эффект не снижен. Когда воздушный зазор b в тормозе становится шире, тормозные поверхности отходят дальше от намагничивающих средств, и сила магнитного поля, создаваемого намагничивающими средствами, и приложенная к тормозным поверхностям, уменьшается. Вследствие этого в намагничивающие средства требуется подавать ток большей величины, чтобы создать силу для тормозных поверхностей, которая перевела бы тормозные поверхности из сцепленного состояния в расцепленное состояние. В худшем случае воздушный зазор b может быть настолько велик, что тормозные поверхности 204, 206 не разведутся в полной мере, или не разведутся вообще, и при этом возможна работа мотора против тормоза. Когда данный воздушный зазор слишком велик, катушка может оказаться неспособной оттянуть тормоз в отпущенное состояние.
Если величина воздушного зазора большее ее типичного значения, то тормозной диск тормоза изношен и требует замены, чтобы тормоз работал надлежащим образом. В это случае можно сказать, что тормоз неисправен. Если величина воздушного зазора превышает требуемый уровень, то возможно даже при работе привода в тормозе имеет место нежелательный контакт дисков. Это может приводить к потерям энергии, износу тормозного материала или засаливанию, а также к накоплению пыли в тормозе.
Торможение вызывает износ фрикционного материала тормозного диска, и таким образом, увеличивает воздушный зазор в тормозе. Воздушный зазор в тормозе -это зазор b внутри тормоза, когда последний в сцепленном состоянии. При отпускании тормоза магнит тормоза оттягивает опорный диск от тормозного диска, давая возможность мотору свободно вращаться. Если воздушный зазор слишком широк, намагничивающие средства не могут притянуть к себе опорный диск, и тормоз не отпускает. Это может быть вызвано тем, что воздушный зазор плохо отрегулирован.
Воздушный зазор может также быть слишком узким. Если воздушный зазор слишком узкий, то тормоз нельзя отпустить надлежащим образом, в силу чего может возникать ситуация работы мотора против тормоза, по меньшей мере в какой-то степени. Слишком узкий зазор также может быть вследствие того, что воздушный зазор плохо отрегулирован.
Согласно варианту осуществления изобретения, можно определять износ фрикционного материала тормоза на основе данных токового отношения, измеряемого для намагничивающих средств тормоза. Измерение токового отношения будет более подробно рассмотрено ниже. Например, на фиг. 2а износ тормозной поверхности 204 может быть обнаружен по увеличению воздушного зазора b тормоза. Толщина фрикционного материала может определять состояние тормоза. В крайнем случае, фрикционный материал может быть изношен, при этом тормоз будет неисправен и будет работать плохо. В этой ситуации воздушный зазор имеет наибольшую ширину, и превышает максимальную величину, например, 1,2 мм типичного воздушного зазора для тормоза. Другой крайний случай - это новый тормоз или состояние, соответствующее новому тормозу, когда толщина фрикционного материала максимальная. В этой ситуации воздушный зазор имеет наименьшую ширину, например, минимальную величину 0,4 мм вышеупомянутого типичного воздушного зазора.
В тормозном диске толщина материала может составлять 11,15 мм, когда диск новый, и 10,4 мм, когда диск изношенный. Толщина материала - это суммарная толщина стальной основы тормозного диска и фрикционного материала с обеих сторон. Пропорция толщин материала (фрикционный материал: железо: фрикционный материал) в направлении износа приблизительно соответствует 1:1:1.
Согласно варианту осуществления изобретения, тормозной поверхностью 202 может являться фрикционный диск 104, тормозной поверхностью 204 - тормозной диск 106, а тормозной поверхностью 206 может служить опорный диск 112, как на фиг. 1. Тормозной диск в предпочтительном случае выполнен из материала с высоким коэффициентом трения, так чтобы торможение было эффективным при включении тормоза, как на фиг. 2b. Когда тормозные поверхности находятся в сцепленном состоянии, как на фиг. 2b, опорный диск прижимает тормозной диск к фрикционному диску, в силу чего все тормозные поверхности располагаются впритык друг к другу. Тормозной диск тогда оказывается зажатым между опорным диском и фрикционным диском, и силы трения опорного диска и фрикционного диска суммируются.
В ситуации фиг. 2b контроль состояния тормоза возможен путем использования известных средств измерения воздушного зазора b тормоза при помощи щупа для измерения зазоров. В этом случае воздушный зазор - это непосредственное расстояние между тормозной поверхностью 206 и корпусом 208 тормоза.
На каждой из фиг. 3а и 3b изображено устройство для контроля состояния тормоза, соответствующее варианту осуществления настоящего изобретения. Хотя устройства показаны в виде одного блока, могут быть реализованы различные модули и память в виде одного или более логических устройств.
Устройство 300 на фиг. 3а содержит процессорное устройство 302, память 310, и средства 304 для приема электрического тока от намагничивающих средств электромагнитного тормоза. Все устройства электрически соединены друг с другом. Память может содержать одну или более программ, которые могут исполняться процессорным устройством. Процессорное устройство может действовать под управлением программных инструкций, которые хранятся в памяти, и может принимать информацию, касающуюся электрического тока, протекающего в намагничивающих средствах электромагнитного тормоза, чтобы такими образом определять состояние тормоза. Таким образом, процессорное устройство, память и средства приема электрического тока от намагничивающих средств электромагнитного тормоза могут образовывать средства для определения состояния электромагнитного тормоза.
Средства 304 для приема электрического тока от намагничивающих средств электромагнитного тормоза передают информацию о величине принятого тока в качестве электрического сигнала для процессорного устройства 302. Процессорное устройство может определить величину принятого тока из полученного электрического сигнала в качестве электрической величины. Данная определяемая электрическая величина может представлять собой, например, напряжение или электрический ток.
Согласно варианту осуществления настоящего изобретения, средства для приема электрического тока от намагничивающих средств электромагнитного тормоза содержат цепь гальванической связи, которая подает электричество в намагничивающие средства, например, катушку тормоза. Согласно другому варианту осуществления, средства для приема электрического тока от намагничивающих средств электромагнитного тормоза содержат средства для приема энергии магнитного поля, создаваемого намагничивающими средствами тормоза. Магнитное поле тормоза может быть принято устройством, которое расположено близко к тормозу, и в котором магнитное поле тормоза индуцирует ток. В предпочтительном случае средства для приема электрического тока от намагничивающих средств электромагнитного тормоза содержат цепь негальванической связи, которая подает электричество в намагничивающие средства, например, катушку тормоза. Устройство такого типа представляет собой, например, приемник, который принимает энергию магнитного поля, и расположен вокруг проводника, подающего ток в намагничивающие средства тормоза. Таким образом, ток, проходящий по проводнику, может быть измерен по магнитному полю, которое он создает.
Процессорное устройство может иметь в своем составе набор регистров, арифметико-логическое устройство и управляющее устройство. Управление управляющим устройством осуществляют посредством последовательности программных инструкций, которые передаются в процессорное устройство из памяти. Управляющее устройство может содержать многочисленные микроинструкции для выполнения основных функций. Реализация микроинструкций может быть разной в зависимости от конфигурации процессорного устройства. Программные инструкции могут быть закодированы с помощью языка программирования, который может являться языком высокого уровня, такого как С или Java, или языком низкого уровня, такого как язык машинных кодов или ассемблер. Память может быть энергозависимой или энергонезависимой, такой как EEPROM, ROM, PROM, RAM, DRAM. SRAM, программно-аппаратные средства, и программируемая логика.
Устройство 320 на фиг. 3b содержит устройство 322 для контроля электромагнитного тормоза, например, устройство 300 по фиг. 3а. Средства 324 обмена данными для передачи и/или приема информации электрически связаны с устройством 322 для контроля электромагнитного тормоза. Средства обмена данными могут содержать модем, например, для обмена данными между сетью и устройством 320. Сеть может представлять собой беспроводную сеть обмена данными, в которой информация передается по эфиру в полосе радиочастот сети. Средства обмена данными могут содержать необходимые устройства для радиочастотной передачи данных, например, антенну для преобразования информации между полосой радиочастот и полосой частот исходных сигналов.
Вариант осуществления изобретения предусматривает компьютерную программу на дистрибутивном носителе, содержащую программные инструкции, которые, будучи загруженными в электронное устройство, заставляют процессорное устройство реализовать вариант осуществления настоящего изобретения.
Компьютерная программа может быть в формате исходного кода, формате объектного кода или в промежуточном формате, и может быть записана на передающем носителе, который может представлять собой любой объект или устройство, которое способно хранить программу. К числу передающих носителей такого типа относится носитель информации, память компьютера, несущая электрическая волна, сигнал обмена данными и, например, программный дистрибутивный пакет.
Устройство 300 может быть также реализовано в виде одной или более интегральных схем, например, интегральных схем специального назначения, ASIC. Возможны также и другие реализации, например, в виде схемы, выполненной из отдельных логических элементов. Также возможен и комбинированный вариант из указанных различных реализаций. Примером схем, выполненных на логических элементах, может служить программируемая пользователем вентильная матрица, ППВМ.
Для специалистов в данной области должно быть понятно, что устройства, изображенные на фиг. 3a и 3b, могут также содержать и другие элементы помимо тех, что рассмотрены выше, но которые не являются существенными для изобретения и потому были опущены, чтобы сделать описание более ясным.
Согласно варианту изобретения, устройства на фиг. 3а и 3b могут содержать устройство отображения, такое как жидкокристаллический дисплей. Устройство отображения может представлять собой сенсорный экран, при этом получение инструкций от пользователя может происходить через экран. Вместе с устройством отображения могут также использоваться другие средства ввода данных. Вводимые данные могут, например, содержать пороговую величину токового отношения для одного или более тормозов. Принятая информация по пороговой величине может быть сохранена в памяти и может использоваться при контроле тормозов.
Устройство отображения может быть связано, например, посредством электрического соединения с процессорным устройством, которое может через эту связь управлять экраном, чтобы отображать информацию о состоянии одного или более тормозов. Информация от состоянии тормоза может содержать уровень состояния тормоза и/или измеренное для тормоза токовое отношение, которое было вычислено процессорным устройством, например, в соответствии с инструкциями, которые хранятся в памяти, и которое может содержать пороговое значение для токового отношения. Далее, на основании данных токового отношения тормоза процессорное устройство может рассчитать время технического обслуживания, которое может заключать в себе срок службы тормоза. Хронологические данные токового отношения тормоза, а также данные оценки будущих значений токового отношения могут быть использованы при вычислении времени технического обслуживания. Срок службы может быть определен в виде числа актов торможения, в виде даты, числа дней или комбинации указанных величин. Число актов торможения может быть рассчитано суммарно, например, от момента предыдущего технического обслуживания, или же возможно вычисление оставшегося числа актов торможения, прежде чем тормоз потребует технического обслуживания. Аналогично числу актов торможения, может быть рассчитано суммарное число дней, начиная от предыдущего обслуживания, или число дней, оставшихся до обслуживания. Данные даты могут содержать дату технического обслуживания.
Фиг. 4а изображает грузоподъемный механизм 400 с электромагнитным тормозом 402, который контролируют в соответствии с вариантом осуществления настоящего изобретения. В грузоподъемном механизме по фиг. 4а средства 410 подъема груза, такие как барабанная лебедка, функционально соединены с электромагнитным тормозом 402 через средства 405, 408 передачи мощности.
Мотор 404 грузоподъемного механизма создает механическое вращательное движение, которое передается на барабанную лебедку 410 через средства передачи мощности. Средства 405 передачи мощности могут содержать, например, ось 405 мотора, при помощи которой вращательное движение передают от мотора на другие элементы. Когда ось мотора вращается, вращательное движение оси передают устройствам, которые связаны с осью, таким как барабанная лебедка 410. Когда мотор таким образом приводит в движение барабанную лебедку, груз, связанный с барабанной лебедкой, перемещается.
Согласно варианту осуществления изобретения, средства передачи мощности содержат ось 405 мотора и зубчатую передачу 408, при помощи которой мощность мотора может быть использована для привода средств 410 подъема груза, чтобы либо поднимать, либо опускать груз. Кроме того, мотор может быть использован для регулирования скорости, с которой средства подъема груза перемещают груз.
Грузоподъемный механизм 400 может содержать муфту 406, посредством которой мотор может быть связан с зубчатой передачей 408. После установления связи мотора с зубчатой передачей мощность от мотора может быть передана барабанной лебедке 410 и перемещаемому грузу.
Согласно варианту осуществления изобретения, грузоподъемный механизм содержит тормоз 402, который связан с мотором, и тем самым тормоз может замедлять и/или останавливать механическое движение, передаваемое от мотора или средств подъема груза к средствам передачи мощности. Тормоз может быть связан с осью мотора, например, как показано на фиг. 1, где тормозной диск установлен на оси мотора. В таком случае во время торможения тормозные поверхности смещены в положение смыкания, как показано на фиг. 2b, в силу чего тормоз оказывает сопротивление движению, передаваемому от оси.
Согласно одному примеру, источником движения средств передачи мощности может являться мотор, когда мотор работает и сообщает оси механическое вращение. Источником указанного движения может также быть грузоподъемный механизм, который связан с осью, например, через зубчатую передачу, и создает на оси механическое усилие, величина которого определяется массой груза, соединенного с грузоподъемным механизмом. Когда мотор работает и вращает средства передачи мощности при включенном тормозе, то говорят, что мотор работает против тормоза.
Согласно варианту осуществления, грузоподъемный механизм 400 содержит устройство 412 контроля для контроля состояния тормоза. Устройство контроля может соответствовать, например, устройству контроля, изображенному на фиг. 3а и 3b.
Фиг. 4b изображает грузоподъемное устройство 450 с электромагнитным тормозом, который контролируют согласно варианту осуществления настоящего изобретения. Грузоподъемное устройство в примере по фиг. 4b представляет собой мостовой кран, который изображен в своей рабочей среде, которая в данном примере представляет собой складское здание 470. Мостовой кран содержит мост 476 с установленной сверху тележкой 472. Тележка содержит грузоподъемный механизм 400 для подъема и опускания груза. Грузоподъемный механизм, к примеру, может быть таким, какой показан на фиг. 4а, с установленным в нем устройством 480 контроля подобным тому, какое показано на фиг. 3а и 3b. Тележка выполнена с возможностью перемещения между стенами складского здания. Мост выполнен с возможностью перемещения в направлении глубины складского здания. Таким образом, груз 474, связанный с мостовым краном, можно перемещать при помощи грузоподъемного механизма 400, тележки и/или моста в направлениях их движения. Как говорилось выше в отношении фиг. 4а, грузоподъемный механизм 400 содержит тормоз. Дополнительно к тормозу грузоподъемного механизма мостовой кран также содержит тормоз 477, который при включенном состоянии останавливает перемещение моста. Мостовой кран дополнительно содержит тормоз 473, который при включенном состоянии останавливает движение тележки. Все вышеупомянутые тормоза могут быть тормозами электромагнитного типа, которые контролируются посредством устройства 480 контроля. Каждый из тормозов грузоподъемного механизма, моста и тележки осуществляет замедление движения своего соответствующего узла.
Согласно варианту осуществления изобретения, контроль нескольких электромагнитных тормозов 402, 477, 473 осуществляют на основе одного и того же порогового значения токового отношения. Токовое отношение может быть определено, как показано на фиг. 5, блок 508. Поскольку при контроле нескольких тормозов можно использовать одно и то же пороговое значение токового отношения, например, пороговое значение, которое соответствует уровню состояния тормоза, то как показано на фиг. 5, блок 510, это упрощает контроль тормозов грузоподъемного устройства. Уровень состояния тормоза задает для каждого тормоза требование технического обслуживания, в силу чего задача контроля нескольких различных тормозов в грузоподъемном устройстве становится проще.
На фиг. 5 изображена блок-схема алгоритма контроля тормоза. Тормоз может быть, например, тормозом электромагнитного типа, который рассмотрен для вариантов осуществления, показанных на фиг. 2а и 2b.
Контроль тормоза может заключаться в контроле состояния тормоза на основе износа тормозных поверхностей. В результате износа тормозных поверхностей воздушный зазор b между тормозной поверхностью 206 и корпусом 208 тормоза становится шире, когда тормоз находится в сцепленном состоянии.
Согласно варианту осуществления изобретения, контроль состояния тормоза содержит контроль соответствия требованиям электрического тока, подаваемого в тормоз, исходя из токового отношения. Токовое отношение может быть определено, как отношение электрического тока, измеренного в момент начала движения тормозных поверхностей, к максимальному электрическому току в намагничивающих средствах, когда тормоз находится в расцепленном состоянии.
Согласно варианту осуществления изобретения, грузоподъемное устройство, такое какое показано на фиг. 4b, модернизируют при помощи устройства контроля, соответствующего фиг. 3а и 3b или при помощи компьютерной программы, которая реализует функции устройства контроля. Устройство контроля может быть установлено на грузоподъемное устройство, как показано на фиг. 4а. Если в грузоподъемном устройстве имеются несколько тормозов, то для контроля каждого из них могут быть установлены отдельные устройства контроля. Компьютерную программу можно хранить в памяти грузоподъемного устройства, в силу чего она может быть запущена на все время, или ее можно запускать в определенные моменты времени. Таким образом, старое оборудование и грузоподъемные устройства, уже находящиеся в эксплуатации, могут быть поставлены на контроль в соответствии с настоящим изобретением.
Блок-схема, изображенная на фиг. 5, может быть реализована, например, посредством устройств фиг. 3a и 3b, которые содержат средства для приема электрического тока от намагничивающих средств тормоза, а процессорное устройство может выполнять операции согласно блок-схеме фиг. 5 на основе информации, которую передают в процессорное устройство те устройства, которые с ним соединены.
На шаге 502 производят определение максимального электрического тока намагничивающих средств тормоза при его расцепленном состоянии. Максимальный электрический ток можно определить, как наибольший ток в намагничивающих средствах, когда тормоз переводят из сцепленного состояния по фиг. 2b в расцепленное состояние по фиг. 2а. Чтобы определить максимальный электрический ток, устройство контроля подключают так, чтобы принять информацию о токе, протекающем в цепи намагничивающих средств. Подключение может быть выполнено либо гальванически, либо негальванически, как это было описано в отношении фиг. 3а. Измерение электрического тока в намагничивающих средствах может быть начато одновременно с подачей в тормоз управляющей команды на отпускание. Измерение может потребовать, например, 1 с времени, в течение которого типичный тормоз отпускает. Наибольшая величина электрического тока, например, в амперах (А), обнаруженная во время измерения, определяет максимальный ток в тормозе.
На шаге 504 производят определение величины электрического тока в намагничивающих средствах тормоза, когда тормозные поверхности начинают движение от сцепленного состояния к расцепленному состоянию. Эта величина может быть представлена, например, в амперах (А). Момент начала движения может быть определен по вибрации тормоза, например, посредством датчиков.
Согласно варианту осуществления изобретения, начало движения тормозных поверхностей от сцепленного состояния к расцепленному состоянию определяют по производной по времени от электрического тока, измеряемого в намагничивающих средствах тормоза. Производная по времени определяет изменение электрического тока в функции времени. В результате перемещения тормозных поверхностей в намагничивающих средствах индуцируется электрический ток противоположный по направлению току, который подают в намагничивающие средства. Увеличение электрического тока, измеренного в намагничивающих средствах, затем замедляется, останавливается, или же значения электрического тока даже уменьшаются.
Перемещение тормозных поверхностей прекращают, когда тормоз отпущен, какое показано на фиг. 2а. После этого величина электрического тока непрерывно увеличивается, пока ток не достигает максимального значения. Замедление, прекращение и уменьшение роста электрического тока может быть определено по производной электрического тока по времени исходя из точки локального минимума производной. Начало движения тормозных поверхностей предпочтительно определять по точке локального минимума производной электрического тока по времени. Измерение производной тока по времени не зависит от степени износа различных тормозов и/или тормоза. Таким образом, контроль состояния различных тормозов, имеющих разную степень износа, является несложным.
Когда электрический ток уменьшается в результате движения тормозных поверхностей, как на кривой 702 фиг. 7а после момента t12, пиковое значение тока достигается в момент t12, который предшествует спаду величины электрического тока и минимуму производной тока по времени, который достигается в момент t13.
Когда рост электрического тока замедляется или прекращается в результате движения тормозных поверхностей, как на кривой 706 после момента t21, перед точкой локального минимума производной 708 по времени, который достигается в момент t22, пиковое значение тока достигается в момент t22, соответствующий локальному минимуму производной. Следует отметить, что когда рост тока прекращается и/или ток почти сохраняет свое значение, минимум производной электрического тока по времени достигается в период времени, соответствующий прекращению движения, при этом пиковое значение электрического тока можно определить, как пиковое значение в то время, когда производная достигает минимума.
Согласно фиг. 5, определение отношения силы электрического тока, которая была найдена на шаге 504 к максимальному электрическому току, который был найден на шаге 502, осуществляется на шагах 506, 508. Отношение может быть определено на шаге 508 путем вычисления на шаге 506 обратной величины максимального тока, который был найден на шаге 502, и умножения данной обратной величины, вычисленной на шаге 506, на силу тока, которая была найдена на шаге 504.
На шаге 508 получают токовое отношение, на основе которого на шаге 510 определяют соответствие требованиям электрического тока, подаваемого в тормоз.
Согласно варианту осуществления изобретения, соответствие электрического тока, подаваемого в тормоз для отпускания тормоза, требованиям устанавливают на шаге 510.
Согласно варианту осуществления изобретения, соответствие требованиям электрического тока, подаваемого в тормоз, определяют на шаге 510 на основе одного или более пороговых значений (порогов) th. Порог может определять уровень состояния тормоза. У тормоза может быть несколько уровней состояния, при этом каждому из уровней состояния соответствует некоторый порог. Состояние может описываться, например, следующими уровнями: «исправен», «требует обслуживания», «неисправен». Когда токовое отношение превышает определенный порог, уровень состояния, соответствующий данному порогу th, описывает состояние тормоза.
Фиг. 7а иллюстрирует изменение различных электрических токов, измеряемых в намагничивающих средствах электромагнитного тормоза, в функции времени, а также производные измеряемых токов по времени в соответствии с вариантом осуществления изобретения. Измерение электрических токов могут производить, например, с устройствами по фиг. 3a или 3b. На фиг. 7а кривые 702, 706 и 709 показывают электрические токи, измеряемые в различных тормозах, или в одном тормозе при разных степенях износа, а кривые 704, 708, 710 показывают соответствующие производные по времени от кривых 702, 706 и 709. На кривых 702, 706 и 709 измерение электрического тока производилось, когда тормозные поверхности переводили из сцепленного состояния (фиг. 2b) в расцепленное состояние (фиг. 2а). До моментов t11, t21 и t31 ток в намагничивающие средства тормозов для перемещения тормозных поверхностей не подавали. Электрический ток в намагничивающие средства подавали начиная от моментов t11, t21 и t31.
В момент t12 кривая 702 электрического тока достигает своего наибольшего значения, после чего величина электрического тока начинает снижаться.
Наибольшего значения в момент t12 электрический ток достигает перед тем, как в момент t13 достигает локального минимума производная тока по времени (кривая 702).
Кривая 706 продолжает расти между моментами t21 и t22, когда производная 708 по времени, соответствующая кривой 706, оказывается больше нуля или равной нулю. Наибольшее значение кривой 706 на интервале между моментом t21 и моментом t22 отвечает локальному минимуму производной от кривой 706, который достигается в момент t22.
Локальный минимум производной по времени можно определить по изменению последовательных значений производной. Последовательные значения производной по времени могут быть получены путем, например, взятия выборок (сэмплирования) сигнала производной, при этом локальный минимум может быть зафиксирован для момента времени, когда средняя из трех последовательных во времени выборок оказывается меньше первой и последней выборки. На кривых 704 и 708 локальный минимум производной по времени приходится на момент, который лежит между пиками р1, р2, р3, р4 кривых производной. Локальный минимум производной 704 приходятся на момент t13, когда величина производной меньше, чем при выборках в моменты до момента t13 и после момента t13, при этом пик p1 предшествует локальному минимуму, а пик р2 следует после локального минимума. Локальный минимум производной 708 приходится на момент t22, когда величина производной меньше, чем при выборках в моменты до момента t22 и после момента t22, при этом пик р3 предшествует локальному минимуму, а пик р4 следует после локального минимума.
Хотя выше было рассмотрено нахождение момента времени локального минимума производной по времени путем использования трех выборок, также для нахождения момента локального минимума возможно использование большего числа выборок, благодаря чему можно избежать ошибок, вызванных помехами, действующими на измеряемый сигнал, и таким образом увеличить точность определения минимума. К примеру, моментом локального минимума можно считать момент, когда определенная выборка оказывается меньшей, чем пять выборок до нее и пять выборок после нее.
Согласно варианту осуществления изобретения, кривые 702 и 706 изображают электрические токи, измеренные в различных электромагнитных тормозах. Электромагнитные тормоза могут различаться своими электрическими и/или магнитными свойствами. Электрические свойства также могут различаться подаваемым на тормоз напряжением (вольтами), током (амперами) и/или импедансом (омами). С точки зрения магнитных свойств тормоза могут различаться материалом и/или размером деталей. В результате этих отличий различным электромагнитным тормозам требуются токи разной величины, чтобы создавать магнитное поле, приводящее в движение тормозные поверхности.
Как правило, кривые электрических токов, измеряемые в намагничивающих средствах электромагнитных тормозов, могут изменяться по мере износа тормозных поверхностей и самих тормозов. Когда тормозные поверхности изнашиваются, воздушный зазор в электромагнитном тормозе становится шире. Расстояние между тормозными поверхностями и намагничивающими средствами также увеличивается, и для перевода тормозных поверхностей из сцепленного положения (фиг. 2b) в расцепленное положение (фиг. 2а) требуется более сильное магнитное поле.
На фиг. 7а начальный момент движения тормозных поверхностей определяют по моментам t12 и t22. Когда тормозные поверхности начинают перемещение из сцепленного положения в расцепленное положение, в намагничивающих средствах электромагнитного тормоза индуцируется ток противоположного направления, и его влияние на измеряемый ток наибольшее в моменты t13 и t22 локального минимума производной каждого измеряемого тока по времени. Когда движение тормозных поверхностей завершается, ток противоположного направления уже больше не индуцируется в намагничивающих средствах. В результате этого электрический ток, измеряемый в намагничивающих средствах, как видно из кривых 702 и 706, увеличивается после прохождения локального минимума производной по времени в моменты t13 и t22.
Кривая 709 непрерывно возрастает на интервале между моментами t31 и t33. В момент t33 кривая 709 достигает максимума. Производная 710 по времени от кривой 709 не имеет локального минимума между моментами t31 и t33 в отличие от производных кривых 702, 706, у которых были локальные минимумы в моменты t13 и t22. Поскольку у производной кривой 709 вообще не сформировался локальный минимум, можно констатировать, что тормозные поверхности не были расцеплены. Вместо локального минимума у производной по времени есть только один пик в момент t32 между моментами t31 и t33. В этом случае при освобождении тормоза не возник электрический ток, направленный противоположно току, который питает намагничивающие средства, т.е. ток, индуцированный в намагничивающих средствах вследствие движения тормозных поверхностей. Такой противоположно направленный ток можно было бы обнаружить по замедлению или прекращению роста тока и даже по снижению величины электрического тока на участке кривой между моментами t31 и t32. На основании кривой 709 и ее производной по времени можно определить, что тормозные поверхности не были отведены в достаточной мере или вообще не были отведены от сцепленного состояния. Другими словами, тормоз остался включенным. В случае тормоза, которому соответствует кривая 709, электрический ток, подаваемый в намагничивающие средства тормоза, является недостаточным, чтобы освободить тормоз. Кривая 709 и ее производная по времени типичны для изношенного тормоза.
В тормозе, представленном кривой 702, движение тормозных поверхностей может быть обнаружено по уменьшению электрического тока между моментами t12 и t13. В тормозе, представленном кривой 706, начальный момент движения тормозных поверхностей может быть обнаружен по замедлению роста электрического тока перед моментом t22, в который производная тока по времени достигает своего локального минимума. Кривая 706 после момента t22 растет непрерывно, пока электрический ток не достигнет максимальной величины. Начальный момент движения может быть определен из кривой 702 как момент, предшествующий локальному минимуму производной тока по времени, когда электрический ток достигает своего наибольшего значения. На кривой 702 можно видеть отдельный пик тока, причем величины тока с обеих сторон от момента t12 меньше, чем пиковое значение.
На кривой 706 нет отдельного пика, перед которым и после которого значения тока были бы меньше пикового значения. Начальным моментом движения тормозных поверхностей может быть признан момент t22, в который производная тока по времени имеет локальный минимум.
Согласно варианту осуществления изобретения, кривые 702 и 706 могут представлять электрические токи, измеренные в одном и том же тормозе, а кривые 704 и 708 - производные по времени измеренных токов. Тогда кривые 702 и 704 представляют ситуацию, при которой тормозные поверхности более изношены, чем в случае, которому соответствуют кривые 706 и 708, которые измерены для того же тормоза, но до износа тормозных поверхностей. В результате износа тормоза может быть обнаружен отдельный пик на кривой 702 в момент t12.
Согласно варианту осуществления изобретения, кривые 702 и 706 могут представлять электрические токи, измеренные в различных тормозах, а кривые 704 и 708 - производные по времени измеренных токов. Тормоза могут отличаться, например, своими электрическими свойствами, магнитными свойствами и/или размерами. Тогда кривые 702 и 704 в типичном случае соответствуют более крупному тормозу, в то время как кривые 706 и 708 представляют тормоз меньшего размера.
Фиг. 7b иллюстрирует состояние электромагнитного тормоза посредством электрического тока, измеренного в намагничивающих средствах и токового отношения, вычисленного для этого тормоза. Токовое отношение получают, когда начинается движение тормозных поверхностей, как отношение измеренного тока к максимальному току при расцепленном состоянии тормоза.
Фиг. 7b изображает электрические токи, измеренные в намагничивающих средствах, при этом кривая 714 представляет тормоз, который не имеет существенного износа, например, новый тормоз. Кривая 712 представляет изношенный тормоз. Кривые 712 и 714 демонстрируют непрерывный рост, при этом последовательно измеренные величины электрического тока либо одна больше другой, либо по существу равны по значению. Производная по времени для тока, соответствующего кривой 714, всегда положительна, как для случая кривой 706 и ее производной 708 на фиг. 7а. Производная по времени от кривой 712 повторяет производную 710 от кривой 709 по фиг. 7а, которая является типичной для изношенного тормоза, который не отпускает.
Износ тормоза виден по электрическим токам, измеренным в тормозе, когда тормоз был изношен. Фиг. 7b изображает различные кривые электрического тока, измеренного в намагничивающих средствах электромагнитного тормоза, а также токовые отношения при различных степенях износа тормоза в соответствии с вариантом осуществления настоящего изобретения. Кривая 714, снятая при токовом отношении 30%, соответствует наименьшему износу тормоза, а кривая, снятая при токовом отношении 80%, соответствует наибольшему износу тормоза. Кривые, снятые при токовых отношениях 40%, 50% и 60%, соответствуют растущему износу тормоза. Кривые, снятые при токовых отношениях 30%, 40%, 50%, 60% и 80% достигают своего первого пика, когда происходит расцепление тормозных поверхностей из сцепленного положения. Пиковые значения I30, I40, I50, I60 и I80, соответствующие каждой кривой электрического тока, отложены на вертикальной оси на фиг. 7b. Таким образом, растущий износ тормоза вызывает увеличение электрического тока, который требуется, чтобы начать перемещение тормозных поверхностей, при этом пиковые значения I30, I40, I50, I60 и I80 становятся больше в результате износа тормоза. Кривые электрического тока, соответствующие токовым отношениям 40%, 50%, 60% и 80%, и кривые их производных повторяют форму кривой 702 тока и кривой 704 ее производной по фиг. 7а, у которых пик электрического тока в момент t12 предшествует локальному минимуму производной в момент t13. Когда тормозные поверхности движутся после момента t12, величина электрического тока снижается из-за встречного тока, который индуцируется за счет движения тормозных поверхностей. Когда производная электрического тока достигает своего минимума в момент t13, движение тормозных поверхностей прекратилось. После этого электрический ток увеличивается в направлении своей максимальной величины.
Согласно варианту осуществления изобретения, начальный момент движения тормозных поверхностей определяют по максимуму электрического тока в момент, соответствующий локальному минимуму производной тока тормоза по времени, или в момент, предшествующий локальному минимуму. Эта величина электрического тока может быть использована на шаге 504 по фиг. 5. Локальный минимум следует за началом перехода тормоза из сцепленного состояния к расцепленному состоянию, что можно наблюдать в моменты t12 и t13, а также t22 на фиг. 7а.
Согласно варианту осуществления изобретения, когда тормозные поверхности начинают переходить из сцепленного состояния в расцепленное состояние, электрический ток определяют, как величину тока, измеренную в намагничивающих средствах тормоза, в момент, когда производная электрического тока по времени находится в своем локальном минимуме после начала движения тормозных поверхностей. Тогда можно также определить токовое отношение для тормозов малого размера, новых тормозов и/или изношенных тормозов, даже если измеряемый электрический ток не уменьшается в результате начала движения, что показывает кривая 706 на фиг. 7а, и кривая 714 на фиг. 7b.
За счет использования локального минимума производной тока по времени, определение электрического тока, когда тормозные поверхности начинают движение от сцепленного состояния к расцепленному состоянию, становится проще. Таким образом, когда известен максимальный ток, можно определять токовое отношение для начального момента движения тормозных поверхностей. Таким образом, токовое отношение можно также получать для тормоза, даже если электрический ток в нем непрерывно возрастает, и не обнаружены никакие пиковые точки, прежде чем ток достигает максимума, как на кривой 706 фиг. 7а.
Максимальная величина электрического тока на кривой 702 следует за минимумом производной тока по времени в момент t13 и достигается в момент t14. Между моментами t13 и t14 кривая электрического тока непрерывно растет.
Соответственно, максимальная величина электрического тока на кривой 706 следует за минимумом производной тока по времени в момент t22 и достигается в момент t23. Между моментами t22 и t23 кривая электрического тока непрерывно растет.
Максимальная величина электрического тока на кривой 709 достигается в момент t33 и следует за пиком производной в момент t32.
Согласно варианту осуществления изобретения, электрический ток в намагничивающих средствах тормоза, когда тормозные поверхности начинают перемещение, определяют на основе сигнала производной по времени от тока в намагничивающих средствах. Величину электрического тока в момент начала движения тормозных поверхностей можно определить, как величину максимального тока в момент предшествующий локальному минимуму производной тока по времени, как на кривой 704, или как величину электрического тока в момент локального минимума производной тока по времени, как на кривой 708.
Фиг. 6 изображает алгоритм осуществления способа контроля состояния тормоза, соответствующего варианту осуществления изобретения. Способ может быть осуществлен посредством устройства контроля состояния тормоза, изображенного на фиг. 3a и 3b. Контролируемым тормозом может быть электромагнитный тормоз, показанный в ранее рассмотренных вариантах осуществления.
Алгоритм начинает работу на шаге 602, на котором устройство контроля подключают к тормозу, чтобы принимать ток, подаваемый в намагничивающие средства тормоза. Устройство контроля может быть подключено к цепи, через которую подают электрический ток, например, к проводнику цепи. Подключение может быть гальваническим или негальваническим. Гальваническое подключение может быть реализовано, например, посредством шунтирующего резистора. Негальваническое подключение может быть реализовано посредством приемника магнитного поля, установленного вокруг проводника.
На шаге 604 производят определение отношения тока, измеренного, когда тормозные поверхности начинают перемещение от их сцепленного состояния в направлении расцепленного состояния, к максимальному электрическому току в намагничивающих средствах тормоза при расцепленном состоянии тормозных поверхностей. Это может быть выполнено, например, на шагах 508 и 506 (фиг. 5). При определении электрического тока ток, подаваемый в намагничивающие средства тормоза, можно измерять на протяжении подходящего времени, например, на протяжении 1 с, когда происходит отпускание тормоза. Далее, в сигнале измеренного тока могут быть сделаны выборки и обработаны каким-либо образом с целью определения максимального тока, токового отношения и производной тока по времени, что известно специалистам в данной области.
На шаге 606 может быть произведено сравнение токового отношения с пороговым значением th. Пороговое значение может представлять порог для токового отношения, например, 80%. Пороговое значение может быть одним и тем же для нескольких тормозов, которые различаются, например, по своим электрическим и/или магнитным свойствам. Таким образом, пороговое значение не зависит от размера тормоза, но представляет процентное отношение т.е., например, одно и то же процентное отношение может быть использовано в тормозах различных размеров и от различных производителей. Пороговое значение может быть задано клиентом, например, оператором портового крана, при этом один и тот же порог используют для всех тормозов портового крана. Когда токовое отношение, найденное на шаге 604, превышает пороговое значение th, алгоритм переходит к шагу 608. Если проверка на шаге 606 показывает, что порог не превышен, то алгоритм возвращается к шагу 604, на котором может быть продолжен контроль токового отношения тормоза.
На шаге 608 производят определение состояния тормоза. Состояние тормоза может быть определено на основе токового отношения, найденного на шаге 604. Состояние тормоза может быть определено так, как это было описано для шага 510 по фиг. 5. После определения состояния тормоза алгоритм на шаге 610 завершает работу. Алгоритм мог бы продолжить свою работу и определить, например, план технического обслуживания тормоза. Это можно сделать на основе данных состояния тормоза. План технического обслуживания тормоза может включать в себя время обслуживания тормоза, определение цикла технического обслуживания и/или расчет срока службы.
Следует отметить, что, хотя способ был выше рассмотрен для одного тормоза, его можно использовать для контроля нескольких тормозов, которые могут отличаться друг от друга. Тогда способ может быть использован отдельно для каждого тормоза.
Согласно варианту осуществления изобретения, токовое отношение, измеренное на шаге 604, определяет воздушный зазор тормозных поверхностей тормоза. Превышение порогового значения th токовым отношением (определяется на шаге 606) может тогда характеризовать уровень состояния тормоза и соответствующий воздушный зазор.
Различные тормоза могут иметь различные воздушные зазоры, которые определяют состояние тормоза, то есть, требует ли тормоз технического обслуживания или он вышел из строя и, таким образом, плохо работает. Согласно варианту осуществления изобретения, для токового отношения определяют пороговое значение, которое задает уровень состояния и соответствующий воздушный зазор нескольких тормозов. Уровень состояния, например, может быть охарактеризован словами «требует обслуживания», при этом воздушный зазор может быть самым широким, какой допустим для каждого тормоза. Соответствие между токовым отношением и воздушным зазором различных тормозов показано на фиг. 7c.
На фиг. 7 с показано изменение токового отношения тормоза в функции времени, измеренного для двух различных тормозов в соответствии с вариантом осуществления настоящего изобретения. Токовое отношение каждого тормоза показано своей собственной кривой 732 и 734. Токовое отношение было определено для тормозов с целью установления для данных тормозов порогового значения. Пороговое значение представляет воздушный зазор, при котором тормоз требует обслуживания или вышел из строя.
Кривые 732 и 734 токового отношения тормозов содержат измеренные значения токового отношения до момента 738, после которого будущие токовые отношения для каждого из тормозов получены методом оценки. Оценка может быть выполнена, например, путем определения математической функции, которая наилучшим образом соответствует результатам измерения, и применения найденной функции к результатам измерения. Посредством такой оценки могут быть определены времена 740, 742 технического обслуживания для каждого тормоза в точках, где кривые токового отношения, полученные путем оценивания, пересекаются с пороговым значением токового отношения.
Кривая 732 достигает порогового значения 736 токового отношения в момент 740 времени, а кривая 734 достигает порогового значения 736 токового отношения в момент 742 времени. В момент 740 воздушный зазор тормоза, которому соответствует кривая 732, достиг такой ширины, при которой указанный тормоз требует обслуживания. Одно и то же пороговое значение токового отношения можно использовать для обоих тормозов с целью определения воздушного зазора тормозных поверхностей данного тормоза.
Пороговое значение 736 токового отношения может характеризовать порог, который указывает, что тормоз требует технического обслуживания или что тормоз вышел из строя.
Следует отметить, что оценивание времени технического обслуживания тормозов не является обязательной процедурой. Также можно определять токовое отношение тормоза и определять состояние тормоза способом, который был рассмотрен выше для вариантов осуществления изобретения, когда токовое отношение, измеренное для тормоза, достигает заданного порогового значения 736.
Согласно варианту осуществления изобретения, срок службы тормоза рассчитывают на основе одного или более токовых отношений. На основе измеренных значений токового отношения можно оценить кривые 732, 734 - будущие значения токового отношения, при этом момент времени, когда токовое отношение, полученное путем оценки, достигает порогового значения, заданного для токового отношения, представляет собой срок службы тормоза. Например, при пороговом значении равном 100% получают весь оставшийся срок службы, после которой тормоз становится неисправным. Тогда уровень состояния тормоза описывают словом «неисправен». Можно также вычислить срок службы до следующего обслуживания и/или до следующего уровня состояния, например, срок службы тормоза от уровня «исправен» до уровня «требует обслуживания».
Срок службы можно определять как число актов торможения или дней, остающихся до достижения токовым отношением порогового значения. Кроме того, срок службы можно определять для определенной даты путем расчета даты на основе данных срока службы, например, в виде числа дней, а также можно определять срок службы от текущей даты. Срок службы тормоза можно также определять в виде комбинации числа дней, числа актов торможения, и даты, когда может быть обнаружено требование технического обслуживания тормоза; и также возможно определять время для обслуживания, когда токовое отношение, полученное путем оценки, превышает пороговое значение касательно любого числа дней, или актов торможения, или даты.
Кривые 732 токового отношения тормозов могут быть измерены для различных тормозов или одинаковых тормозов, при этом тормоз, которому соответствует кривая 734, изнашивается более медленно. Более медленный износ может быть вызван менее интенсивным использованием тормоза.
Фиг. 8а изображает электрический ток 852, измеренный в намагничивающих средствах электромагнитного тормоза, когда ток в намагничивающие средства подают от схемы с токовым бустером. Токовый бустер может быть использован для подачи тока в намагничивающие средства тормоза с усилением. Токовый бустер обычно используют для подачи тока с усилением, коль скоро тормоз должен быть отпущен, например, путем перевода тормозных поверхностей из положения фиг. 2b в положение фиг. 2а, или ближе к положению, показанному на фиг. 2а, когда осуществляют отделение тормозных поверхностей друг от друга. Когда в тормозе сформирован воздушный зазор, тормозная поверхность 206 на фиг. 2а расположена ближе к намагничивающим средствам 210, чем в ситуации фиг. 2b, и электрический ток, подаваемый в тормоз, может быть уменьшен путем отключения токового бустера. Это может быть сделано самое позднее, когда тормоз будет полностью отпущен. Тогда уменьшенного электрического тока, подаваемого в намагничивающие средства, достаточно, чтобы поддерживать тормоз в отпущенном состоянии.
Кривая 852 на фиг. 8а представляет кривую отфильтрованного электрического тока. Типично форма кривой электрического тока содержит колебательную составляющую, зависящую от частоты питающей сети. Обычно при использовании токового бустера частота колебаний равна удвоенной частоте питающей сети, а после отключения токового бустера равна частоте питающей сети. В тормозах без использования токового бустера указанное колебание действует все время с частотой питающей сети. Для применяемых алгоритмов кривая тока требует фильтрации указанного колебания, и обычно для этой цели используют фильтрацию фильтром низких частот. Фильтрация была применена в отношении кривой 852 фиг. 8а и в отношении кривых на фиг. 7а и 7b.
Кривая 852 электрического тока соответствует кривой 702 по фиг. 7а за исключением того, что максимальный ток, измеренный в намагничивающих средствах тормоза, электрический ток, измеренный, например, в момент t14 на фиг. 7а, уменьшается после момента 856 до более низкого уровня 854. Уменьшение электрического тока - это результат отключения токового бустера. Если есть нарушение в токовом питании, то это может быть обнаружено по тому факту, что электрический ток не достигает своего максимального уровня, например, максимального уровня тока, который предшествует снижению 852 тока на фиг. 8а. Это может быть вызвано неисправностью в подаче тока, например, когда подают ток после однополупериодного выпрямления вместо двухполупериодного выпрямления.
Если нарушение возникает, то это проявляется в скачкообразном изменении токового отношения ступенями, например, 30% могут поменяться на 45%, потому что знаменатель, т.е. максимальный ток, при вычислении токового отношения внезапно уменьшается. Нарушение может быть обнаружено при нескольких последовательных актах торможения, и скачкообразное изменение может быть обнаружено исходя их этих торможений при сравнении друг с другом токовых отношений, соответствующих указанным актам торможения. Нарушение также может быть обнаружено по единственной кривой изменения тока при торможении, если иным образом получен надежный сигнал или получена информация об использовании или намерении использовать токовый бустер. Тогда нарушение может быть обнаружено при использовании токового бустера на основании факта отсутствия спада тока. При этом предполагается, что моментом измерения максимального тока является момент, когда спад 854 тока также виден.
Фиг. 8b изображает схему источника питания электромагнитного тормоза 882 с бустером 874 питания. Схема источника питания построена так, чтобы подавать в тормоз 882 электрический ток при разной мощности. Электрический ток, получаемый от источника 870 напряжения, в режиме малой мощности подают в тормоз 882 без усиления. Когда усиление не включено, источник напряжения не соединен с токовым бустером, при этом ключ 873 разомкнут.
Напряжение, получаемое от источника напряжения, обычно является напряжением переменного тока, что показано на графике 876. Чтобы получить малую мощность, напряжение, получаемое от источника напряжения, выпрямляют в выпрямителе 872. Выпрямитель 872 может, например, являться однополупериодным выпрямителем. Выпрямленное напряжение подают на тормоз, в намагничивающие средства тормоза, при этом отпускание тормоза может происходить параллельно с движением тормозных поверхностей, например, из состояния по фиг. 2b в состояние по фиг. 2а. Когда ключ 873 разомкнут, через сумматор 878 на тормоз 882 поступает только напряжение от выпрямителя 872.
Когда ключ 873 замкнут, от источника напряжения получает напряжение выпрямитель 874, действующий в качестве токового бустера. Выпрямитель 874 преобразует получаемое напряжение в выпрямленное напряжение. Напряжения, получаемые от обоих выпрямителей 872 и 874, затем складываются в сумматоре 878 и поступают на тормоз 882. В этом случае осуществляют подачу тока в тормоз с участием бустера. Когда ключ 873 замкнут, выпрямители могут работать вместе и образуют двухполупериодный выпрямитель для напряжения, получаемого от источника напряжения.
Выпрямители 874 и 872 могут быть реализованы, например, как однополупериодные выпрямители. Когда оба выпрямителя подают ток в тормоз 882, на выходе сумматора 878 получают напряжение, соответствующее графику 880. Максимальный ток, создаваемый в намагничивающих средствах, достигается как показывает фиг. 8а и кривые 702 и 706 на фиг. 7а. Когда выпрямитель отключают от источника 870 напряжения при помощи ключа 873, электрический ток, создаваемый в намагничивающих средствах тормоза снижается (участок 852) до более низкого уровня 854.
Обычно токовый бустер используют, когда производят освобождение тормоза, чтобы ускорить переход тормоза из включенного состояния в выключенное состояние. Когда тормозные поверхности тормоза перемещены в расцепленное или почти расцепленное положение, тормозная поверхность расположена ближе к намагничивающим средствам тормоза, как на фиг. 2а (тормозная поверхность 206 расположена близко к намагничивающим средствам 210). Из-за того, что тормозная поверхность расположена ближе к намагничивающим средствам при расцепленном положении тормозных поверхностей, чем при их сцепленном положении, тормозные поверхности можно удерживать в расцепленном положении при помощи меньшего электрического тока, чем тот, который требуется для их перевода из сцепленного положения в расцепленное положение, и токовый бустер может быть отключен.
Следует отметить, что схема источника питания по фиг. 8b может также быть осуществлена без источника напряжения, при этом вместо источника напряжения схема источника питания содержит соединение с каким-либо источником электроэнергии.
Фиг. 9 иллюстрирует изменение уровня максимального тока в тормозе в зависимости от температуры. Влияние температуры на токовое отношение можно наблюдать, как изменение уровня максимального тока. В примере на фиг. 9 тормоз был взят в работу холодным, но начал разогреваться в ходе использования. Фиг. 9 изображает поведение тормозного тока при различных температурах Т. Сопротивление катушки тормоза в холодном состоянии меньше, чем сопротивление разогретой катушки, при этом максимальная величина тока больше при холодном тормозе, чем при разогретом тормозе. На фиг. 9 температура возрастает в направлении Т1, Т2, Т3, Т4, Т5.
Таким образом, была обнаружена зависимость максимального тока тормоза от температуры, при этом изменение питающего напряжения также влияет на максимальный ток. Увеличение питающего напряжения увеличивает максимальный ток. Оба указанных фактора могут давать вклад в изменение максимального тока. Изобретение в свою очередь работает несмотря на эти явления, поскольку максимальный ток включен как таковой в расчет токового отношения. Например, если тормоз имеет высокую температуру (эта ситуация важна в отношении работы тормоза и надежности), максимальная мощность остается более низкой, а величина токового отношения становится более высокой. Таким образом, критический предел токового отношения достигается скорее, то есть ситуация более безопасна в отношении работы тормоза и надежности грузоподъемного устройства.
Вышеуказанным образом температура тормоза влияет на максимальный ток, а это вызывает изменение величины токового отношения, когда изменяется температура. Напротив, не было отмечено, чтобы бы температура оказывала какое-либо значимое влияние на уровень тока отпускания тормоза. В соответствии с вариантом осуществления изобретения, определение и контроль отклонения тока отпускания тормоза между данными последовательных измерений или измерений близких к последовательным, часто характеризует состояние тормоза.
Ток отпускания тормоза имеет естественное отклонение, которое вызвано небольшими изменениями положения тормозного диска, например, от одного измерения к другому. Это приводит к отклонению тока отпускания. Величина отклонения зависит от размера тормоза, при этом отклонение обычно находится в интервале ±0,5% от максимального тока, например, ±0,25 мА. Внезапное увеличение отклонения между отдельными актами торможения указывает на изменение в работе тормоза. Фиг. 10а показывает отклонение Var(I)a токов отпускания для нормально действующего тормоза; а фиг. 10b показывает отклонение Var(I)b токов отпускания для неисправного тормоза. Следует отметить, что изображенные на фигурах отклонения представлены не в точном масштабе друг относительно друга. В ситуации неисправности отклонение в 8 раз больше, чем в нормальной ситуации. Увеличение отклонения может указывать, например, на отрыв и разрушение фрикционного материала, что требует немедленного технического обслуживания тормоза. Другой причиной может быть ограниченное перемещение опорного диска тормоза, вызванное механической помехой, посторонними частицами или пылью, накопленной из-за износа тормозного диска. Необычное поведение тормоза может быть обнаружено, и в свою очередь может служить сигналом о неисправности тормоза.
Согласно варианту осуществления изобретения, контроль тормоза содержит измерение изменений в отклонении тока тормоза, и когда отклонение тока отпускания превышает определенный предел при последовательных или почти последовательных измерениях, тормоз может быть признан неисправным. Констатация неисправности может быть сделана рассмотренным выше устройством контроля, которое может сигнализировать или предупредить о неисправности посредством сообщения, передаваемого, например, через средства передачи данных. Аварийный сигнал или предупреждение могут быть также выданы через интерфейс, соединенный с устройством контроля. Предел, который вызывает появление сигнала или предупреждения, которые должны быть выданы, может быть задан исходя из различий в отклонениях для неисправного и нормально работающего тормоза, о чем говорилось выше.
Временная очередность шагов и функций, представленных на фиг. 5 и 6, не является абсолютной, и некоторые шаги и/или функции можно выполнять одновременно или в другом порядке, нежели это описано. Между изображенными шагами и/или функциями можно также выполнять и другие функции, или же они могут быть включены в уже описанные шаги и/или функции. Также некоторые шаги и/или функции могут быть опущены или могут быть заменены соответствующим шагом и/или функцией. Набор функций устройства контроля может быть реализован в одном или более физических или логических блоках.
Настоящее изобретение может быть применимо к любому устройству контроля, погрузочному устройству, грузоподъемному устройству, крану, мостовому крану, портовому крану, контейнеровозу-погрузчику или к любому сочетанию различных устройств, содержащих электромагнитный дисковый тормоз, в котором тормозные поверхности могут быть в расцепленном или сцепленном состоянии.
Согласно варианту осуществления изобретения, соответствующее изобретению и рассмотренное выше устройство контроля применимо к грузоподъемному устройству, которое связано с центром технического обслуживания. Тогда устройство контроля может определять состояние тормоза и посылать информацию об этом в центр технического обслуживания. Соединение с центром технического обслуживания может быть осуществлено при помощи средств 324 передачи данных устройства, например, соответствующих фиг. 3b. Следует отметить, что информация, подлежащая передаче в центр технического обслуживания, может содержать уровень состояния тормоза, определенный в устройстве контроля или грузоподъемном устройстве на основе токового отношения, полученного от устройства контроля. Возможно также, чтобы информация, передаваемая в центр технического обслуживания, содержала токовое отношение для данного тормоза, что дает возможность определить уровень состояния тормоза. Таким образом, определение уровня состояния не обязательно делать в устройстве контроля, при этом реализация устройства контроля упрощается. Кроме того, когда определение уровня состояния производят в центре технического обслуживания, который получает информацию от нескольких грузоподъемных устройств, можно производить сравнение токовых отношений от различных грузоподъемных устройств и тормозов и более точно определять уровень состояния.
Устройства, такие как устройства контроля, погрузочные устройства, грузоподъемные устройства, краны, мостовые краны, портовые краны, контейнеровозы-погрузчики, в которых реализована функциональность устройства, соответствующего рассмотренным выше вариантам осуществления, содержат не только известные средства, но также и средства для определения максимального электрического тока в намагничивающих средствах тормоза при его выключенном состоянии (тормозные поверхности расцеплены) и для определения состояния тормоза в виде токового отношения от тока, измеренного, когда тормозные поверхности начинают движение, к максимальному электрическому току. Точнее, они могут содержать средства для реализации набора функций устройства, рассмотренного ранее в вышеописанных вариантах осуществления, при этом они могут содержать отдельные средства для каждой отдельной функции или же средства могут быть организованы так, чтобы выполнять две или более функций. Известные устройства содержат процессоры и память, которые могут быть использованы для одной или более функций, рассмотренных в вышеописанных вариантах осуществления. К примеру, устройство контроля может содержать прикладную программу, или модуль, или блок, способные выполнять арифметические операции или программу (включая дополнительное или обновленное программное обеспечение), которая может быть исполнена, например, процессором. Программное обеспечение, которое также может быть названо программным продуктом, включая программы, апплеты и макросы, можно хранить в любой среде хранения данных, которую может считывать устройство, при этом программный продукт содержит программные инструкции для выполнения конкретных задач. Все изменения и мероприятия, которые необходимы, чтобы реализовать функциональность настоящего варианта осуществления изобретения, могут быть осуществлены программами, которые могут быть реализованы либо в виде дополнительных, либо обновленных программ, интегральных схем специального назначения (ASIC) и/или программируемых микросхем. Кроме того, программы могут быть загружены в устройство в соответствии с рассмотренным вариантом осуществления изобретения. Устройство, такое как устройство контроля, может быть осуществлено посредством компьютера или микропроцессора (однокристального компьютерного элемента), который содержит по меньшей мере память, чтобы обеспечить область хранения для использования при арифметических операциях и процессор для выполнения арифметических операций. Примером процессора является центральный процессор (ЦП). Память устройства может быть съемной.
Согласно варианту осуществления изобретения, устройство контроля тормоза, которое реализует одну или более рассмотренных выше функций, дистанционно связано с центром технического обслуживания. Таким образом, данные состояния тормозов могут быть переданы в центр технического обслуживания, где для тормоза может быть разработан план технического обслуживания и реализован, например, путем определения времени обслуживания. Кроме того, план технического обслуживания тормозов может быть включен в план технического обслуживания устройства, содержащего тормоза, например, портового крана. Таким образом, оба плана технического обслуживания, циклы обслуживания и времена могут быть представлены в виде графика так, чтобы портовый кран можно было поддерживать в рабочем состоянии и сократить время простоя.
Для специалистов в данной области должно быть очевидно, что по мере прогресса технологии, базовую идею изобретения можно будет реализовать множеством разных способов. Таким образом, изобретение и варианты его осуществления не ограничены рассмотренными выше вариантами, и в них могут быть внесены изменения, не выходящие за границы идеи и объема изобретения, которую устанавливает формула изобретения.
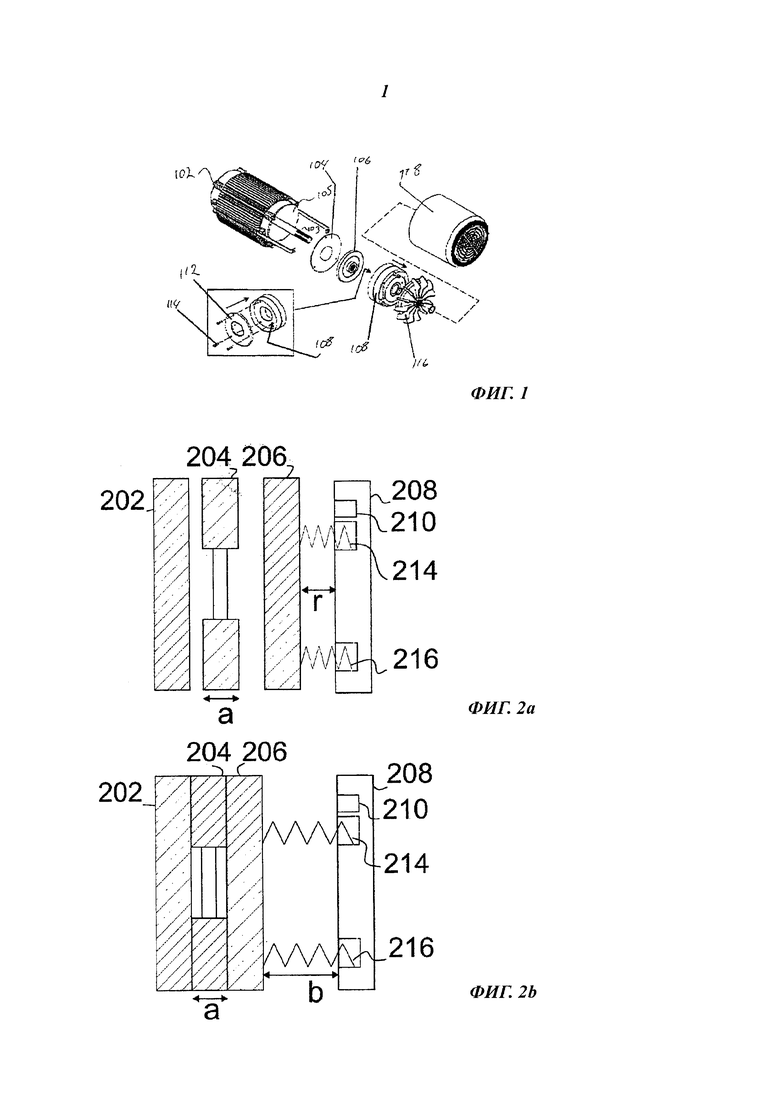
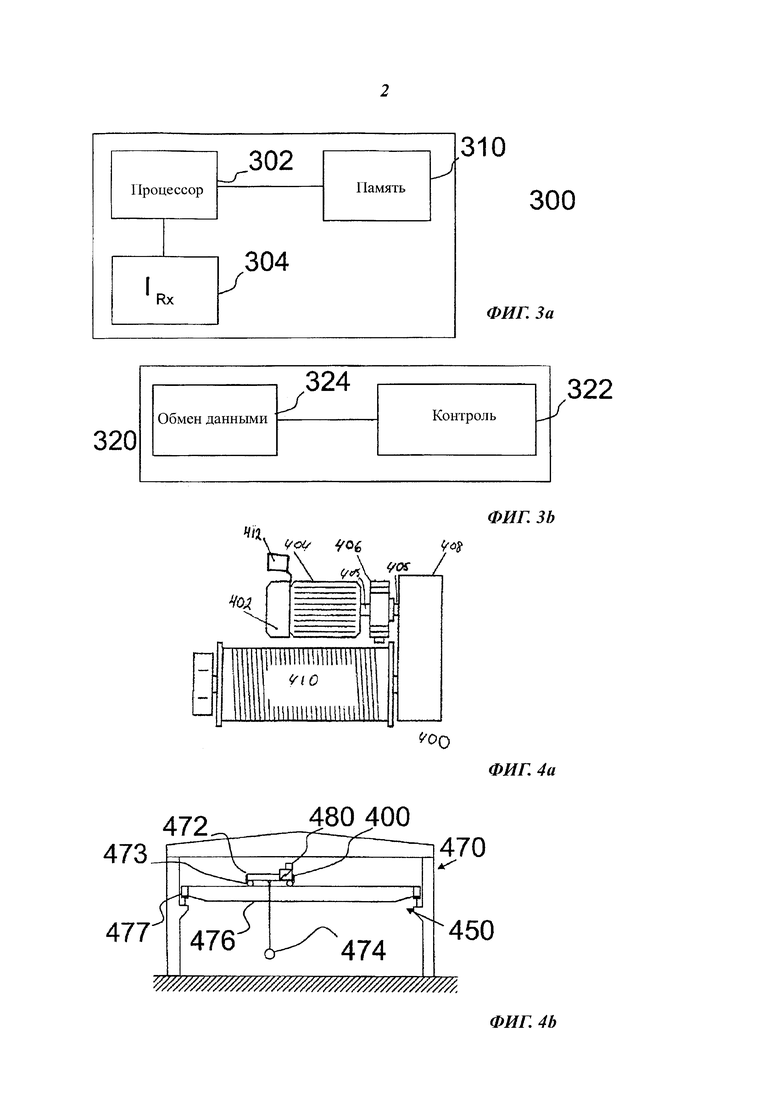
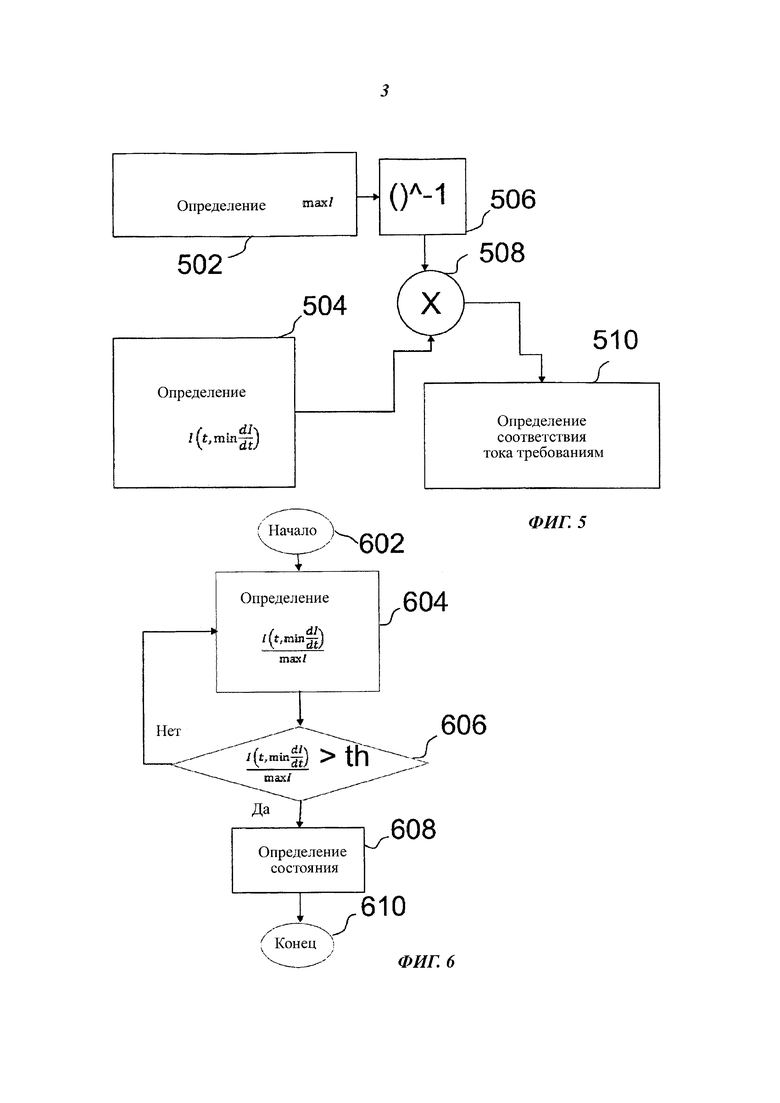
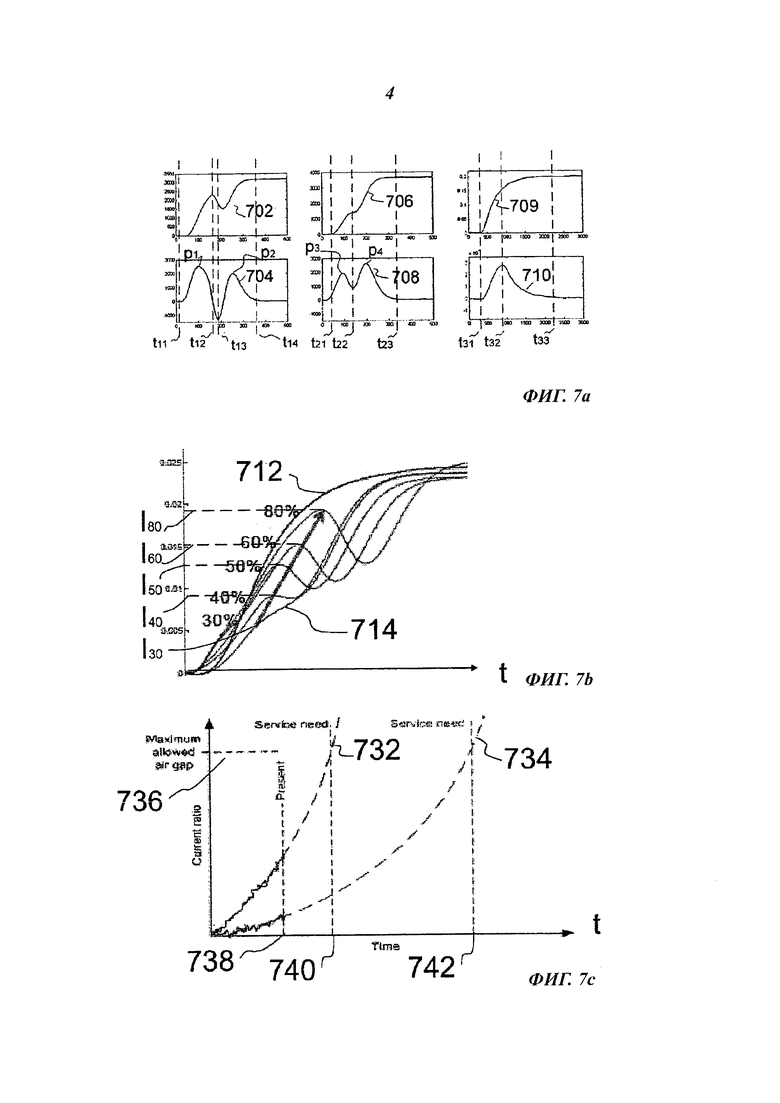
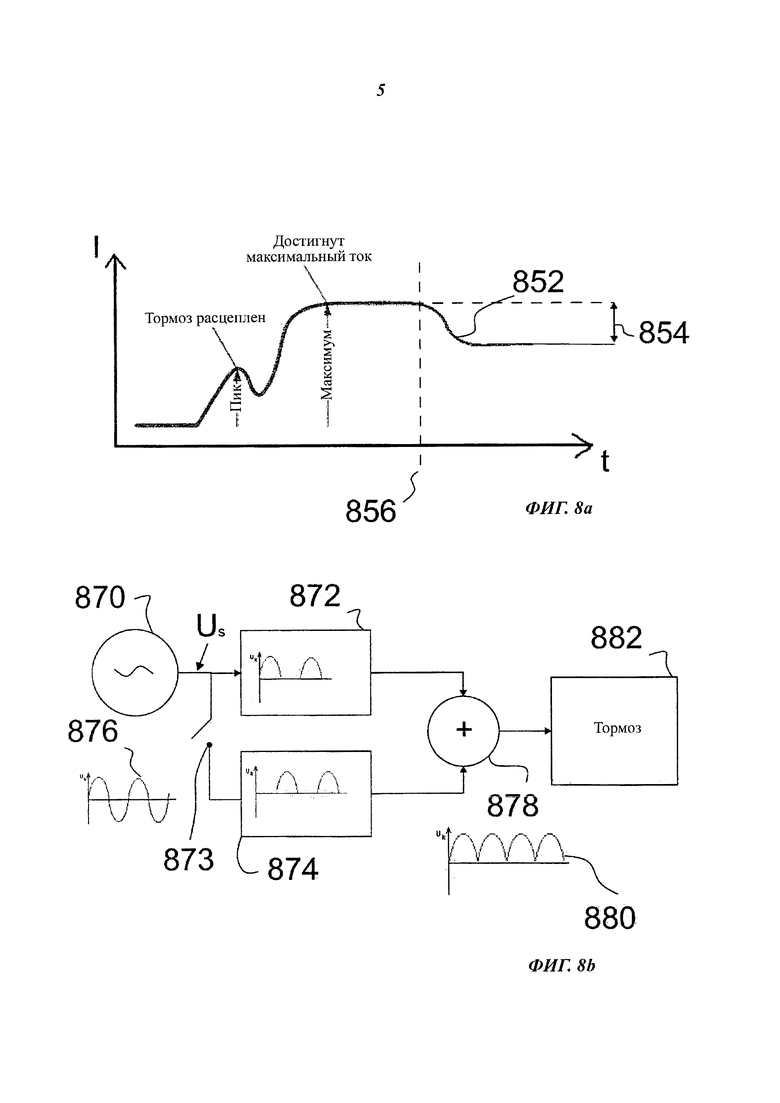
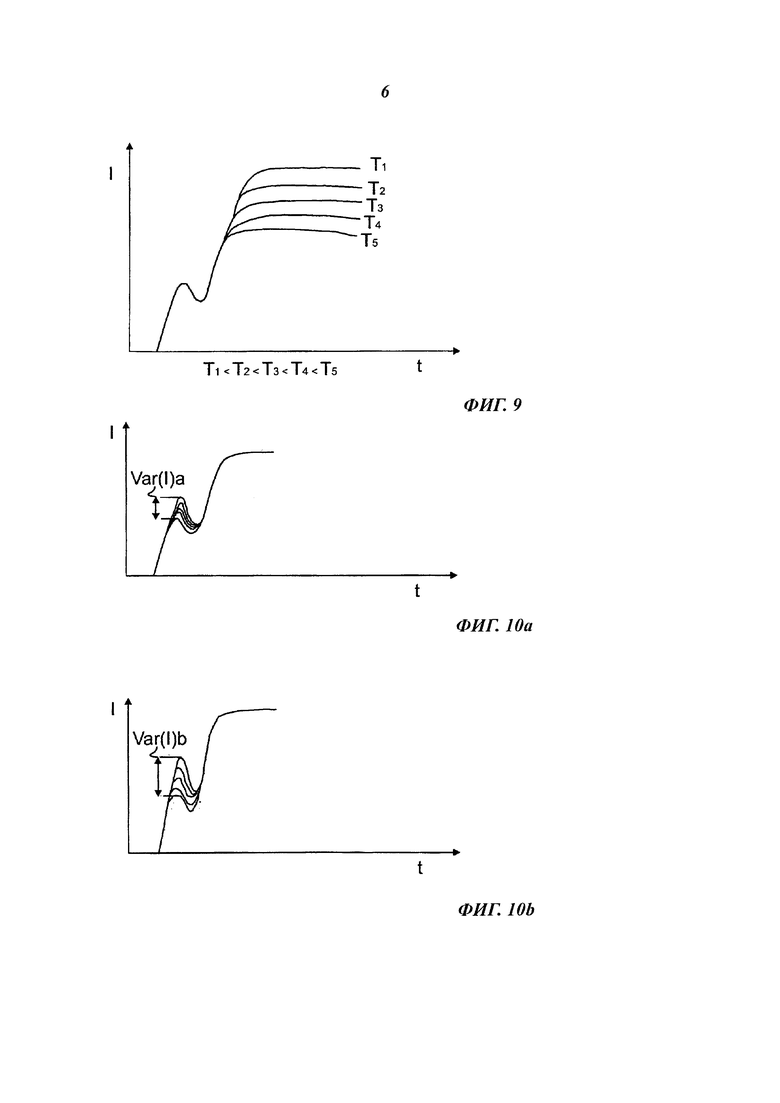
Изобретение относится к электротехнике, а именно к способам, устройствам и системам контроля тормоза (402), содержащего первые (202, 204) и вторые (206,204) тормозные поверхности, намагничивающие средства (210), выполненные с возможностью формирования магнитного поля, способного перемещать тормозные поверхности (202, 204, 206) из сцепленного состояния в расцепленное состояние, при этом способы содержат определение электрического тока тормоза, когда тормозные поверхности (202, 204, 206) начинают перемещение из сцепленного состояния в расцепленное состояние; определение максимального электрического тока в намагничивающих средствах (201) тормоза (402) при расцепленном состоянии тормозных поверхностей и определение состояния тормоза (402) по токовому отношению, т.е. отношения тока, измеренного в начале перемещения тормозных поверхностей (202, 204, 206), к максимальному электрическому току. Технический результат состоит в проведении своевременного технического обслуживания грузоподъемных устройств, в повышении безопасности перемещения грузов и в сокращении времени простоев. 5 н. и 23 з.п. ф-лы, 16 ил. 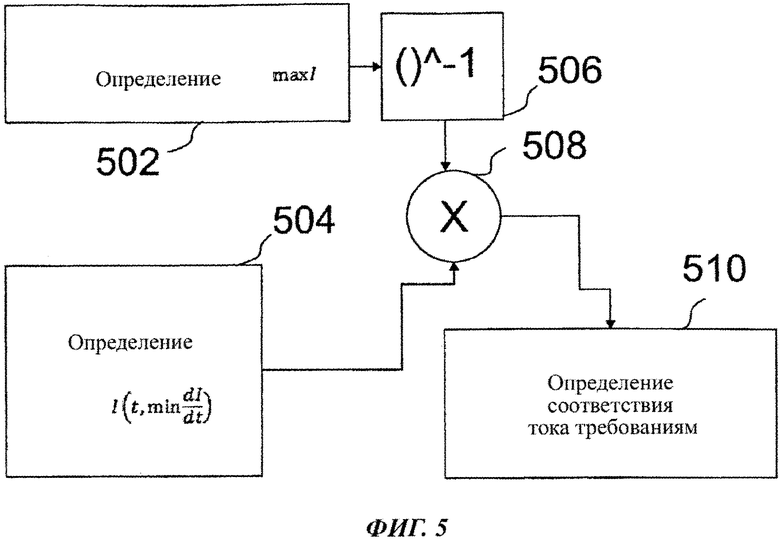
1. Способ контроля тормоза, содержащего:
первую и вторую тормозные поверхности, и
намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности отделены друг от друга, способ содержит:
определение электрического тока тормоза, когда тормозные поверхности начинают движение из сцепленного состояния в расцепленное состояние, отличающийся тем, что содержит
определение максимального электрического тока в намагничивающих средствах тормоза при расцепленном состоянии тормозных поверхностей; определение состояния тормоза в виде токового отношения, т.е. отношения электрического тока, измеренного, когда тормозные поверхности начинают перемещение, к указанному максимальному электрическому току.
2. Способ по п. 1, отличающийся тем, что для вычисления токового отношения максимальный электрический ток тормоза определяют в момент, когда производная тока тормоза по времени достигает своего локального минимума, или в момент времени, предшествующий локальному минимуму.
3. Способ по п. 1 или 2, отличающийся тем, что соответствие электрического тока, подаваемого в тормоз, требованиям определяют на основе указанного токового отношения.
4. Способ по п. 1 или 2, отличающийся тем, что воздушный зазор между тормозными поверхностями определяют на основе указанного токового отношения.
5. Способ по п. 1 или 2, отличающийся тем, что определение токового отношения осуществляют однократно или несколько раз, и состояние тормоза определяют на основе одной или более найденных величин токового отношения.
6. Способ по п. 1 или 2, отличающийся тем, что нарушение электрического питания тормоза определяют на основании изменения величин токового отношения, найденных для нескольких, например, двух последовательных актов отпускания тормоза.
7. Способ по п. 1 или 2, отличающийся тем, что состояние тормоза определяют, когда токовое отношение тормоза превышает пороговое значение, заданное для токового отношения.
8. Способ по п. 1 или 2, отличающийся тем, что состояние тормоза определяют на основе токового отношения и порогового значения токового отношения, которые определены для нескольких тормозов, которые отличаются, например, по своим электрическим и/или магнитным свойствам.
9. Способ по п. 1 или 2, отличающийся тем, что контроль нескольких тормозов осуществляют, используя одно и то же пороговое значение токового отношения.
10. Способ по п. 1 или 2, отличающийся тем, что срок службы тормоза рассчитывают на основе одного или более токовых отношений, при этом срок службы представляет собой, например, количество актов торможения, дату, число дней или сочетание указанных параметров.
11. Способ по п. 1 или 2, отличающийся тем, что срок службы тормоза рассчитывают на основе одного или более токовых отношений, при этом срок службы отображают на дисплее.
12. Способ по п. 1 или 2, отличающийся тем, что выдают предупреждение или аварийный сигнал, когда увеличение отклонения тока отпускания тормоза при последовательных или почти последовательных измерениях превышает заданный предел.
13. Устройство для контроля электромагнитного тормоза, содержащего первую и вторую тормозные поверхности и намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности отделены друг от друга, при этом устройство выполнено с возможностью определения электрического тока тормоза, когда тормозные поверхности начинают перемещение из сцепленного состояния в расцепленное состояние, отличающееся тем, что выполнено с возможностью
определения максимального электрического тока в намагничивающих средствах тормоза при расцепленном состоянии тормозных поверхностей и определения состояния тормоза в виде токового отношения, т.е. отношения тока, измеренного, когда тормозные поверхности начинают перемещение, к указанному максимальному электрическому току.
14. Устройство по п. 13, отличающееся тем, что выполнено с возможностью, для вычисления токового отношения, определения максимального электрического тока тормоза в тот момент, когда производная тока тормоза по времени достигает своего локального минимума, или в момент времени, предшествующий локальному минимуму.
15. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения соответствия требованиям электрического тока, подаваемого в тормоз, на основе указанного токового отношения.
16. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения воздушного зазора между тормозными поверхностями на основе указанного токового отношения.
17. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения токового отношения однократно или несколько раз и определения состояния тормоза на основе одной или более найденных величин токового отношения.
18. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения нарушения электрического питания тормоза на основании изменения величин токового отношения, найденных для нескольких, например, двух последовательных актов отпускания тормоза.
19. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения состояния тормоза, когда токовое отношение тормоза превышает пороговое значение, заданное для токового отношения.
20. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью определения состояния тормоза на основе токового отношения и порогового значения токового отношения, которые определены для нескольких тормозов, которые отличаются, например, по своим электрическим и/или магнитным свойствам.
21. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью контроля нескольких тормозов с использованием одного и того же порогового значения токового отношения.
22. Устройство по п. 13 или 14, отличающееся тем, что срок службы тормоза рассчитан на основе одного или более токовых отношений, при этом срок службы представляет собой, например, число актов торможения, дату, число дней или сочетание указанных величин.
23. Устройство по п. 13 или 14, отличающееся тем, что срок службы тормоза рассчитан на основе одного или более токовых отношений, при этом срок службы отображен на дисплее.
24. Устройство по п. 13 или 14, отличающееся тем, что выполнено с возможностью выдачи предупреждения или аварийного сигнала, когда увеличение отклонения тока отпускания тормоза при последовательных или почти последовательных измерениях превышает заданный предел.
25. Устройство, содержащее средства для осуществления способа, охарактеризованного в любом из пп. 1-12.
26. Система, содержащая устройство, охарактеризованное в любом из пп. 13-24 или 25.
27. Система по п. 26, отличающаяся тем, что содержит один или более электромагнитных тормозов, или одно или более грузоподъемных устройств, или же сочетание тормозов и грузоподъемных устройств.
28. Способ модернизации грузоподъемного устройства, которое имеет в своем составе электромагнитный тормоз, содержащий первую и вторую тормозные поверхности и намагничивающие средства, выполненные с возможностью, в ответ на подаваемый в них электрический ток, формирования магнитного поля, способного перемещать тормозные поверхности из сцепленного состояния, при котором тормозные поверхности сцеплены друг с другом, в расцепленное состояние, при котором тормозные поверхности отделены друг от друга, способ содержит установку устройства, охарактеризованного в любом из пп. 13-24 или 25.
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| US 2003061872 A1, 03.04.2003 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВЫСОКОТЕРМОСТОЙКОГО ДОЛГОВЕЧНОГО ФИЛЬТРУЮЩЕГО ВОЛОКНИСТОГО МАТЕРИАЛА | 2008 |
|
RU2381052C2 |
| US 2004138791 A1, 15.07.2004 | |||
| JPS 51132539 A, 17.11.1976 | |||
| JPS 59191402 A, 30.10.1984 | |||
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2002 |
|
RU2202016C1 |
| JPH 01295793 A, 29.11.1989 | |||
| Устройство контроля за электромагнитным приводом постоянного тока тормоза | 1982 |
|
SU1075031A1 |

