Изобретение относится к частотно-регулируемому электроприводу переменного тока на базе асинхронных двигателей с короткозамкнутым ротором (АДКР) и может быть использовано в системах автоматического управления тяговым электроприводом электроподвижного состава, в судовых гребных электроприводах, приводах прокатных станов и других широко регулируемых электроприводах.
При работе частотно-регулируемого АДКР требуется оперативное отслеживание меняющейся в процессе работы электромагнитной постоянной времени ротора с целью корректировки алгоритмов управления для получения требуемых функциональных характеристик асинхронного электропривода в целом.
Прямое измерение электромагнитной постоянной времени короткозамкнутого ротора возможно только при его неподвижном состоянии. В процессе работы вследствие насыщения и нагрева электромагнитная постоянная времени ротора меняется и, как правило, точно неизвестна. Изменение электромагнитной постоянной времени ротора может достигать 100% и приводить к расстройству системы управления. Неопределенность этого параметра приводит к необходимости адаптации управления.
Известны методы идентификации электромагнитной постоянной времени короткозамкнутого ротора, среди которых эвристические и строгие (Zai L.C., Demarko C.L., Lipo Т.А. Anaxtendid Kahman filter approach to motor time constant measurement in PWM induction drives // IEEE Trans.Industry Application, 1992. Vol.28, №1. P.96-104).
К принципиальным недостаткам, препятствующим достижению указанного ниже технического результата при использовании известных методов, относится то, что в известных методах производится не прямое измерение параметра - электромагнитной постоянной времени ротора, а путем идентификации (отождествления) параметров по каналу регулирования вектора потокосцепления, имеющему внешний контур регулирования напряжения, и каналу регулирования момента по контуру регулирования частоты вращения, имеющему внешний контур регулирования положения вектора потокосцепления ротора, что неизбежно приводит к ошибкам в управлении АДКР.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ управления асинхронным двигателем с адаптацией к изменяющейся постоянной времени ротора, в котором для нахождения алгоритма идентификации используют концепцию адаптивного управления с эталонной моделью, в которой рассматривают только уравнения ротора асинхронного двигателя, причем в качестве вектора переменных состояния приняты компоненты намагничивающего тока ротора, в качестве входа - токи статора, а математическая модель двигателя в виде уравнений токов и момента (Ч.Аттаианесе, А.Дамиано, А.Перфетто. Управление асинхронным двигателем с адаптацией к изменяющейся электромагнитной постоянной времени ротора. // Электротехника, 1996, №7. с.29-31).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относится то, что в известном способе реализации управления асинхронным двигателем используется адаптация к изменяющейся электромагнитной постоянной времени модели ротора, а не ее прямое определение, что также не может обеспечить безошибочное управление АДКР из-за трудности обеспечения адекватности математической модели, сложности математического аппарата, требующей высокого быстродействия средств моделирования.
Задачей предлагаемого способа является обеспечение экономичной и устойчивой работы частотно-регулируемого электропривода на базе асинхронных двигателей с короткозамкнутым ротором.
Поставленная задача решается тем, что в известном способе управления асинхронным двигателем, включающем измерение частоты вращения ротора, фазного тока статора, фазного напряжения статора, частоты вращения магнитного поля статора, управление преобразователем, питающим обмотку статора, задание режимов работы с помощью вычислительного устройства через математическую модель параметра управления, при котором для нахождения алгоритма идентификации изменяющейся в процессе работы электромагнитной постоянной времени короткозамкнутого ротора в реальном времени в математической модели рассматривают уравнения ротора, введены отличия, заключающиеся в том, что для определения текущего значения электромагнитной постоянной времени ротора в вычислительное устройство дополнительно вводят конструктивные параметры асинхронного двигателя в виде активного сопротивления обмотки статора и индуктивности цепи намагничивания, коэффициентов рассеяния магнитных потоков статора и ротора в функции тока статора, в процессе работы вводят информацию об угле фазового сдвига между напряжением и током одной из фаз обмотки статора, а вычислительным устройством определяют электромагнитную постоянную времени ротора по математической формуле, в которую входят все параметры, которые необходимы и которые доступны для непосредственного измерения при любом режиме работающего двигателя

где  - модуль полного сопротивления фазы обмотки статора
- модуль полного сопротивления фазы обмотки статора
где U1 - фазное напряжение; I1 - фазный ток;
φ - угол фазового сдвига между фазным током I1 и фазным напряжением U1;
R1 - активное сопротивление обмотки статора;
ωск - частота скольжения ротора относительно частоты вращения магнитного поля статора ω1

где ω2 - частота вращения ротора;
Lm - индуктивность цепи намагничивания;
σ1 и σ2 - коэффициенты рассеяния магнитных потоков статора и ротора соответственно.
Представленная математическая формула для прямого определения электромагнитной постоянной времени ротора получена следующим образом.
Как известно, полная мощность, потребляемая асинхронным двигателем, складывается из полной реактивной мощности потерь, активной мощности потерь в статорной обмотке и полной мощности, передаваемой в ротор посредством магнитного поля в зазоре двигателя, и может быть описана уравнением

где PΣ - полная мощность, потребляемая двигателем;
Z1=R1+jω1L1 - сопротивление обмотки статора,
где L1 - индуктивность рассеяния обмотки статора;
Ра - активная мощность;
Рb - реактивная мощность;
Ωск - относительная частота скольжения ротора

где R2 - активное сопротивление обмотки ротора;

где L2 - индуктивность рассеяния ротора, равная Lmσ2=L2.
Из (4) можно записать


или


Учитывая, что  , а
, а  , запишем
, запишем


или

Разделив (13) на (11), получим
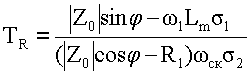
Согласно определению Ωск=ωскТR, тогда по результату измерений определяется электромагнитная постоянная времени ротора, как

В выражение (15) входят параметры, которые необходимы и доступны для измерения при любом режиме работающего двигателя, т.е. ток I1, напряжение U1 на входе фазной обмотки и угол фазового сдвига между ними φ, частота вращения магнитного поля статора ω1 и частота скольжения ротора ωск относительно частоты вращения магнитного поля статора ω1, а также конструктивные параметры: активное сопротивление обмотки статора R1; индуктивность цепи намагничивания Lm и коэффициенты рассеяния магнитных потоков статора и ротора σ1 и σ2.
Данный способ реализуется с помощью устройства, представленного блок-схемой на чертеже.
К обмотке статора асинхронного двигателя 1 подключены инвертор 2, получающий питание от силового трансформатора, датчик фазного тока 3, датчик фазного напряжения 4, датчик угла фазового сдвига между фазным током и фазным напряжением 5 через датчики 3 и 4. К ротору подсоединен датчик частоты вращения 6. К вычислительному устройству 7 подключены датчики: фазного тока 3, фазного напряжения 4, угла фазового сдвига между током и напряжением фазы статора 5 и частоты вращения 6. Вычислительное устройство 7 конструктивно выполнено заодно с блоком системы управления 8, к которому подсоединен задатчик режимов работы 9.
Способ определения электромагнитной постоянной времени ротора АДКР осуществляют следующим образом: в вычислительное устройство 7 вводят конструктивные параметры асинхронного двигателя: активное сопротивление R1, индуктивность Lm цепи намагничивания, коэффициенты рассеяния магнитных потоков статора σ1 и ротора σ2 в функции тока статора; затем при работе электропривода в вычислительное устройство подают информацию от датчика 3 о силе тока I1 и частоте вращения магнитного поля статора ω1, от датчика 4 о величине фазного напряжения U1, от датчика 5 о величине угла фазового сдвига φ между фазным током и фазным напряжением, от датчика 6 о частоте вращения ротора ω2 и вычислительным устройством 7 определяют электромагнитную постоянную времени ротора в соответствии с математической моделью по формуле (1)
и подают информацию в систему управления 8, которая, объединив эту информацию с информацией от задатчика режимов работы 9, управляет инвертором 2, питающим асинхронный двигатель.
При проведении измерения при ω2=0 необходимо, чтобы ω1=ωск, а для уменьшения потребляемой двигателем мощности в режиме ω2=0 и, соответственно, нежелательного перегрева ротора в процессе измерения напряжение питания статорной обмотки должно быть как можно меньше.
В результате перечисленных взаимодействий осуществляют прямое определение электромагнитной постоянной времени короткозамкнутого ротора и по ее величине управление асинхронным двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ИНДУКТИВНОСТИ ЦЕПИ НАМАГНИЧИВАНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2420748C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ОБМОТКИ КОРОТКОЗАМКНУТОГО РОТОРА ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2386114C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННОЙ МАШИНЫ С ФАЗНЫМ РОТОРОМ | 2022 |
|
RU2785209C1 |

Изобретение относится к области электротехники. Техническим результатом является обеспечение экономичной и устойчивой работы частотно-регулируемого электропривода на базе асинхронного двигателя с короткозамкнутым ротором. В способе определения электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя ротором (АДКР) для определения текущего значения электромагнитной постоянной времени ротора в вычислительное устройство вводят конструктивные параметры АДКР в виде активного сопротивления обмотки статора и индуктивности цепи намагничивания, коэффициентов рассеяния магнитных потоков статора и ротора в функции тока статора. В процессе работы вводят информацию о величине фазного тока и напряжения и об угле фазового сдвига между напряжением и током обмотки статора. Вычислительное устройство определяет электромагнитную постоянную времени ротора по математической формуле, которая приведена в материалах заявки и в которую входят все необходимые параметры, доступные для непосредственного измерения при любом режиме АДКР. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ РОТОРА КОРОТКОЗАМКНУТОГО АСИНХРОННОГО ДВИГАТЕЛЯ, ВКЛЮЧАЮЩИЙ ИЗМЕРЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА, ФАЗНОГО ТОКА СТАТОРА, ФАЗНОГО НАПРЯЖЕНИЯ СТАТОРА, ЧАСТОТЫ ВРАЩЕНИЯ МАГНИТНОГО ПОЛЯ СТАТОРА, УПРАВЛЕНИЕ ПРЕОБРАЗОВАТЕЛЕМ, ПИТАЮЩИМ ОБМОТКУ СТАТОРА, ЗАДАНИЕ РЕЖИМОВ РАБОТЫ С ПОМОЩЬЮ ВЫЧИСЛИТЕЛЬНОГО УСТРОЙСТВА ЧЕРЕЗ МАТЕМАТИЧЕСКУЮ МОДЕЛЬ ПАРАМЕТРА УПРАВЛЕНИЯ, ОТЛИЧАЮЩИЙСЯ ТЕМ, ЧТО В ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДОПОЛНИТЕЛЬНО ВВОДЯТ КОНСТРУКТИВНЫЕ ПАРАМЕТРЫ АСИНХРОННОГО ДВИГАТЕЛЯ В ВИДЕ АКТИВНОГО СОПРОТИВЛЕНИЯ ОБМОТКИ СТАТОРА И ИНДУКТИВНОСТИ ЦЕПИ НАМАГНИЧИВАНИЯ, КОЭФФИЦИЕНТОВ РАССЕЯНИЯ МАГНИТНЫХ ПОТОКОВ СТАТОРА И РОТОРА В ФУНКЦИИ ТОКА СТАТОРА, В ПРОЦЕССЕ РАБОТЫ ВВОДЯТ ИНФОРМАЦИЮ ОБ УГЛЕ ФАЗОВОГО СДВИГА МЕЖДУ НАПРЯЖЕНИЕМ И ТОКОМ ОДНОЙ ИЗ ФАЗ ОБМОТКИ СТАТОРА, А ВЫЧИСЛИТЕЛЬНЫМ УСТРОЙСТВОМ ОПРЕДЕЛЯЮТ ЭЛЕКТРОМАГНИТНУЮ ПОСТОЯННУЮ ВРЕМЕНИ РОТОРА ПО МАТЕМАТИЧЕСКОЙ ФОРМУЛЕ, В КОТОРУЮ ВХОДЯТ ВСЕ ПАРАМЕТРЫ, КОТОРЫЕ ДОСТУПНЫ ДЛЯ НЕПОСРЕДСТВЕННОГО ИЗМЕРЕНИЯ ПРИ ЛЮБОМ РЕЖИМЕ РАБОТАЮЩЕГО ДВИГАТЕЛЯ:
 ,
,
ГДЕ  - МОДУЛЬ ПОЛНОГО СОПРОТИВЛЕНИЯ ФАЗЫ ОБМОТКИ СТАТОРА, РАВНЫЙ
- МОДУЛЬ ПОЛНОГО СОПРОТИВЛЕНИЯ ФАЗЫ ОБМОТКИ СТАТОРА, РАВНЫЙ
 ;
;
ГДЕ U1 - ФАЗНОЕ НАПРЯЖЕНИЕ;
I1 - ФАЗНЫЙ ТОК;
φ - УГОЛ ФАЗОВОГО СДВИГА МЕЖДУ ФАЗНЫМ ТОКОМ I1 И ФАЗНЫМ НАПРЯЖЕНИЕМ U1;
R1 - АКТИВНОЕ СОПРОТИВЛЕНИЕ ОБМОТКИ СТАТОРА;
ωСК - ЧАСТОТА СКОЛЬЖЕНИЯ РОТОРА ОТНОСИТЕЛЬНО ЧАСТОТЫ ВРАЩЕНИЯ МАГНИТНОГО ПОЛЯ СТАТОРА ω1;
ωСК=ω1-ω2;
ГДЕ: ω2 - ЧАСТОТА ВРАЩЕНИЯ РОТОРА;
LM - ИНДУКТИВНОСТЬ ЦЕПИ НАМАГНИЧИВАНИЯ;
σ1 И σ2 - КОЭФФИЦИЕНТЫ РАССЕЯНИЯ МАГНИТНЫХ ПОТОКОВ СТАТОРА И РОТОРА СООТВЕТСТВЕННО.
| RU 2052002 C1, 20.02.1996 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2163190C1 |
| US 2006273755 A1, 07.12.2006 | |||
| DE 4110716 A1, 08.10.1992 | |||
| JP 10262400 A, 29.09.1998 | |||
| Форсунка | 1990 |
|
SU1796263A1 |

