Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, и может найти применение для управления многодвигательными электроприводами, в частности, на электрифицированных транспортных средствах.
Известно устройство управления многодвигательными реверсивными электроприводами постоянного тока с импульсным регулированием скорости (патент RU 2529923 C1, B60L, 25.04.2013), обеспечивающее стабилизацию скорости на заданном уровне, автоматический переход двигателей из двигательного в тормозной режим и обратно при изменении заданного значения скорости и знака моментов нагрузки, а также выравнивания токовых нагрузок электродвигателей в режиме импульсного регулирования.
Известное устройство выполнено по структуре подчиненного регулирования с регулятором скорости во внешнем контуре, на вход которого поступает сигнал от задающего элемента, пропорциональный заданному значению угловой скорости, и по цепи отрицательной обратной связи - сигнал, пропорциональный фактическому значению угловой скорости одного из двигателей. К выходу регулятора скорости подсоединены входы релейных регуляторов токов по числу двигателей в электроприводе. При этом информацией о направлении вращения служит полярность напряжения, формируемого задающим элементом. При таком выполнении устройства управления необходимо введение в него модулей выделения абсолютного значения сигнала на выходе регулятора скорости и на выходах датчиков тока, а также достаточно сложного логического блока для изменения конфигурации силовой схемы электропривода при реверсе и переходе из двигательного в тормозной режим и обратно, что приводит к усложнению и удорожанию устройства.
Техническим эффектом данного предложения является упрощение устройства управления многодвигательными электроприводами постоянного тока. Для достижения указанного технического эффекта в состав устройства введены: блок реверса, формирующий логический сигнал «Вперед/Назад», нуль-орган на выходе регулятора скорости, формирующий логический сигнал «Движение/Торможение», и модуль выделения абсолютного значения сигнала между датчиком скорости и сравнивающим элементом, при этом входы компараторов тока соединены непосредственно с выходом регулятора скорости и выходами датчиков тока.
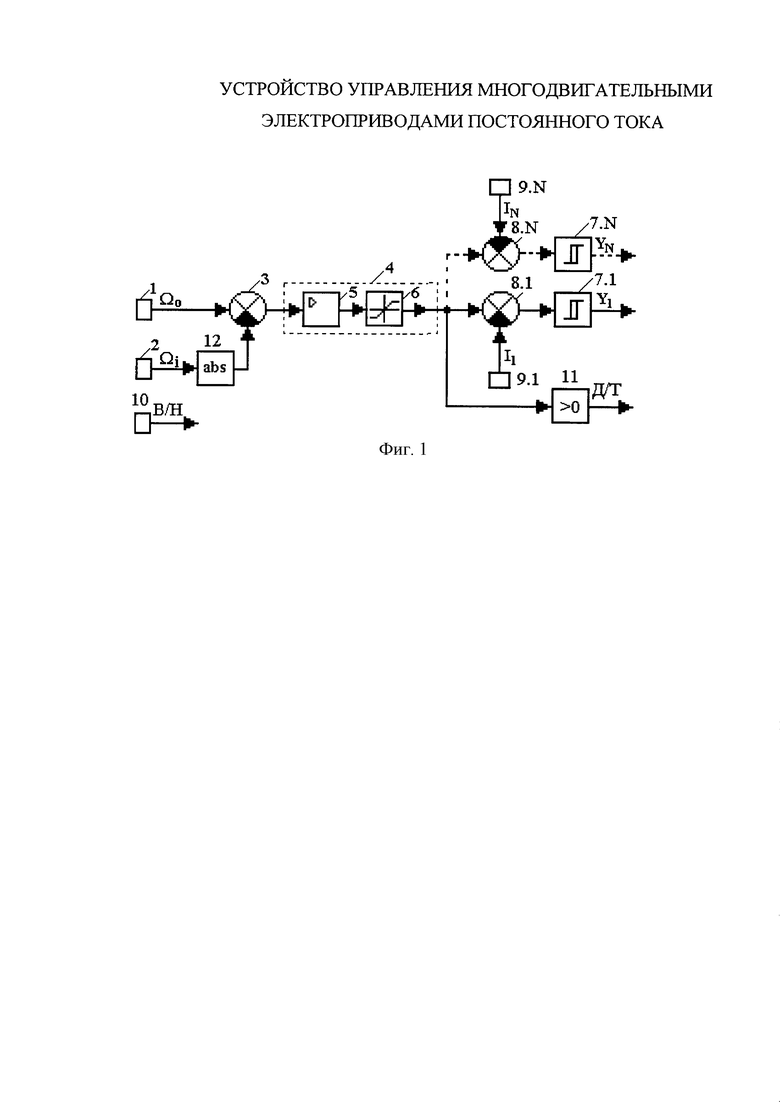
Суть предложения поясняется фиг. 1, на которой изображена функциональная схема предлагаемого устройства управления многодвигательными электроприводами постоянного тока.
Устройство содержит задающий элемент 1, датчик 2 угловой скорости Ωi одного из электродвигателей и сравнивающий элемент 3, подающий сигнал, пропорциональный отклонению скорости от заданного значения, на вход регулятора скорости 4 в составе усилителя 5 и ограничителя 6. К выходу регулятора скорости подсоединены входы релейных регуляторов 7.1-7.Ν токов N электродвигателей через токовые компараторы 8.1-8.Ν, вторые входы которых по цепям отрицательных обратных связей соединены с датчиками 9.1-9 N токов Ι1-ΙΝ электродвигателей. Релейные регуляторы формируют сигналы Υ1-ΥN управления силовыми ключами в цепях питания электродвигателей.
В устройство введены: блок реверса 10, формирующий логический сигнал «Вперед/Назад» (В/К), нуль-орган 11 на выходе регулятора скорости 4, формирующий логический сигнал «Движение/Торможение» (Д/Т), и модуль выделения абсолютного значения сигнала 12 между датчиком скорости 2 и сравнивающим элементом 3, при этом входы токовых компараторов 8.1-8.Ν соединены непосредственно с выходом регулятора скорости 4 и выходами датчиков тока 9.1-9.Ν.
Работает устройство следующим образом. Выходной логический сигнал блока реверса 10 (0 или 1) конфигурирует силовую схему электропривода на включение электродвигателей для движения «Вперед» или «Назад». При подаче на вход регулятора скорости воздействия от задающего элемента 1 на выходе регулятора угловой скорости 4 появляется задающее воздействие для релейных регуляторов 7.1-7.N на уровне ограничения элемента 6, логическим сигналом единичного уровня на выходе нуль-органа 11 формируется силовая схема электропривода для двигательного режима, и двигатели разгоняются с поддержанием их токов на соответствующем максимальном уровне.
При снижении по мере разгона величины ΔΩ=Ω0-Ωi до некоторого малого значения, определяемого величиной коэффициента усиления регулятора угловой скорости, элемент 6 выходит из режима насыщения, и дальнейший разгон электродвигателей происходит с уменьшением величины выходного сигнала регулятора скорости, а следовательно, и с уменьшением токов двигателей, до выхода на установившийся режим работы. Силовые ключи в цепях питания двигателей, управляемые выходными сигналами релейных регуляторов тока 7.1-7.Ν, при расхождении по любой причине угловых скоростей двигателей переключаются асинхронно, но с поддержанием равенства токов, поскольку задающее воздействие для всех регуляторов токов одинаково.
При изменении задающего воздействия в сторону увеличения происходит дальнейший разгон электродвигателей до нового установившегося состояния со стабилизацией токов на установленном уровне ограничения.
Появление отрицательных моментов сопротивления на валах электродвигателей, например, при движении транспортного средства, оборудованного многодвигательным тяговым электроприводом, на самокатном участке пути приведет к росту угловой скорости Ωi, и при переходе выходного сигнала регулятора скорости через нулевое значение на выходе нуль-органа 11 появляется логический сигнал нулевого уровня, изменяющий конфигурацию силовой схемы электропривода для перевода двигателей в тормозной режим работы. При этом система будет поддерживать угловую скорость Ωi с некоторой ошибкой на заданном уровне аналогично тому, как она выполняет эту функцию в двигательном режиме, с автоматическим выравниванием токов электродвигателей.
При изменении величины задающего воздействия в сторону уменьшения на выходе регулятора скорости появляется напряжение отрицательной полярности, на выходе нуль-органа 11 появляется логический сигнал нулевого уровня, который изменят конфигурацию силовой схемы электропривода для перевода двигателей в тормозной режим работы. Происходит снижение угловых скоростей электродвигателей с поддержанием токов на максимальном уровне в течение времени, пока элемент 6 работает в режиме ограничения выходного сигнала. Затем торможение продолжается с постепенным снижением токов электродвигателей при их автоматическом выравнивании. При переходе сигнала на выходе регулятора скорости через нулевое значение нуль-орган 11 логическим сигналом единичного уровня восстановит конфигурацию силовой схемы электропривода для двигательного режима, и электропривод продолжит работу с автоматическим поддержанием с некоторой ошибкой угловой скорости i-го двигателя на новом заданном уровне.
Таким образом, предлагаемое, более простое по сравнению с известным, устройство управления многодвигательным реверсивным электроприводом обеспечивает: автоматическое выравнивание токовых нагрузок электродвигателей в режиме импульсного регулирования скорости, а также стабилизацию скорости с автоматическим переходом двигателей из двигательного в тормозной режим и обратно при изменении заданного значения скорости и знака моментов нагрузки.
Реализация системы управления электропривода по структуре подчиненного регулирования с релейными регуляторами тока обеспечивает высокое качество переходных процессов при больших величинах коэффициента усиления регулятора скорости, что позволяет обеспечить необходимую точность стабилизации скорости на заданном уровне, как в двигательном, так и в тормозном режимах работы, без необходимости использования интегральной составляющей в регуляторе скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока | 1987 |
|
SU1473057A1 |
| Многодвигательный электропривод | 1983 |
|
SU1104632A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
Изобретение относится к области электротехники и может быть использовано для управления многодвигательными электроприводами, в частности, на электрифицированных транспортных средствах. Техническим результатом является повышение качества переходных процессов при больших коэффициентах усиления регулятора скорости и точности стабилизации скорости на заданном уровне в двигательном и тормозном режимах без использования интегральной составляющей в регуляторе скорости. Устройство для управления многодвигательными электроприводами постоянного тока содержит задающий элемент, датчик угловой скорости одного из электродвигателей, регулятор скорости с ограничением уровня выходного сигнала и релейные регуляторы токов электродвигателей, содержащие датчики тока, компараторы и релейные элементы. В состав устройства введены блок реверса, формирующий логический сигнал «Вперед/Назад», нуль-орган на выходе регулятора скорости, формирующий логический сигнал «Движение/Торможение», и модуль выделения абсолютного значения сигнала между датчиком скорости и сравнивающим элементом, при этом входы компараторов тока соединены непосредственно с выходом регулятора скорости и выходами датчиков тока. 1 ил.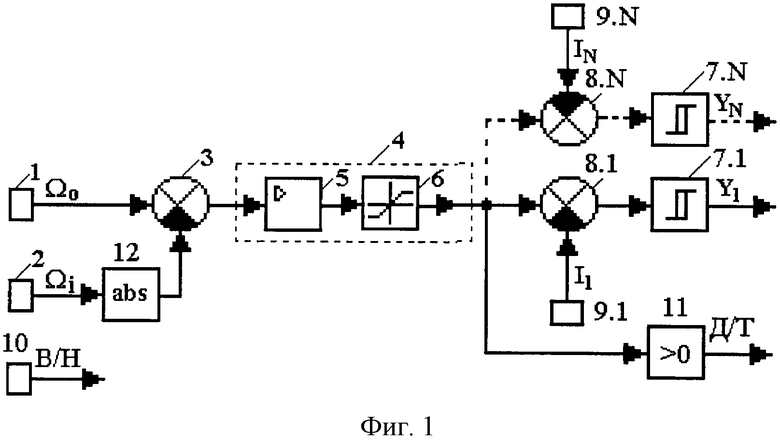
Устройство для управления многодвигательными электроприводами постоянного тока, содержащее задающий элемент, датчик угловой скорости одного из электродвигателей, сравнивающий элемент, регулятор угловой скорости с ограничителем выходного сигнала, датчики токов, компараторы токов и релейные регуляторы, отличающееся тем, что в устройство введены блок реверса, формирующий логический сигнал «Вперед/Назад», нуль-орган на выходе регулятора скорости, формирующий логический сигнал «Движение/Торможение», и модуль выделения абсолютного значения сигнала между датчиком скорости и сравнивающим элементом, при этом входы компараторов тока соединены непосредственно с выходом регулятора скорости и выходами датчиков тока.
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Приспособление для обрезания сучьев со стволов поваленных деревьев | 1954 |
|
SU103258A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
| JPS 55127807 A, 03.10.1980 | |||
| JPS 5517230 A, 06.02.1980 | |||
| СПОСОБ ПОЛУЧЕНИЯ СВЕРХПРОВОДЯЩЕЙ КЕРАМИКИ НА ОСНОВЕ БАРИЕВОГО КУПРАТА | 1989 |
|
RU2024464C1 |

