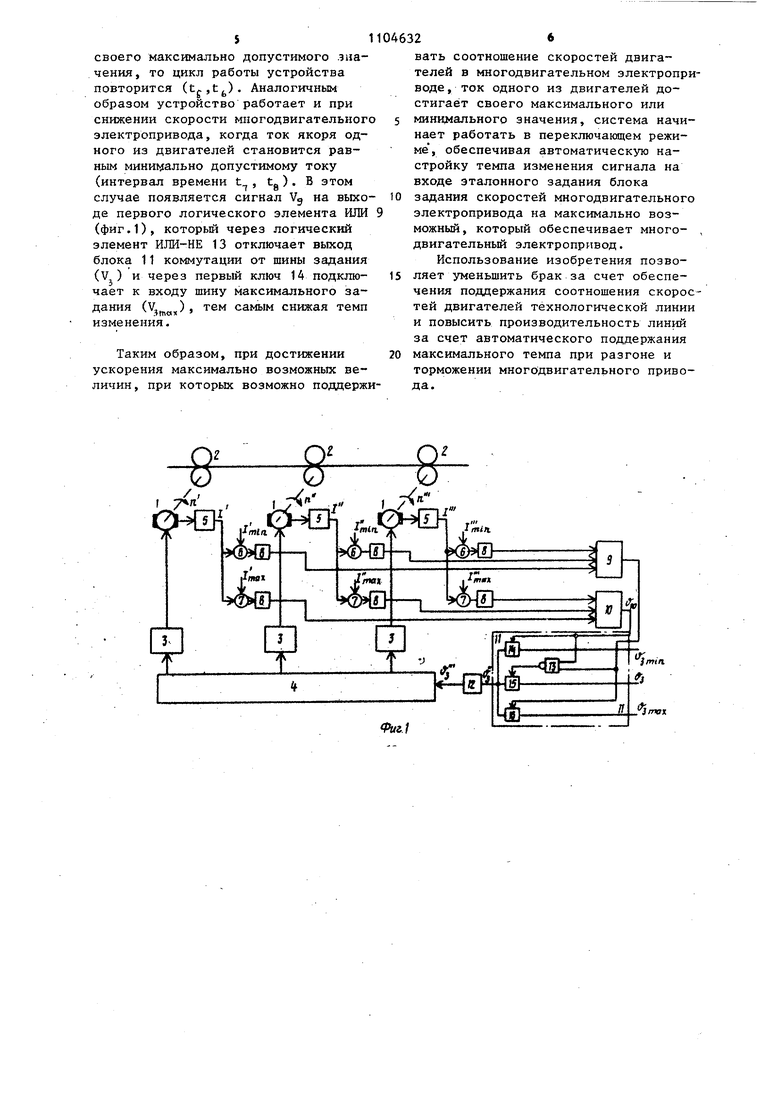
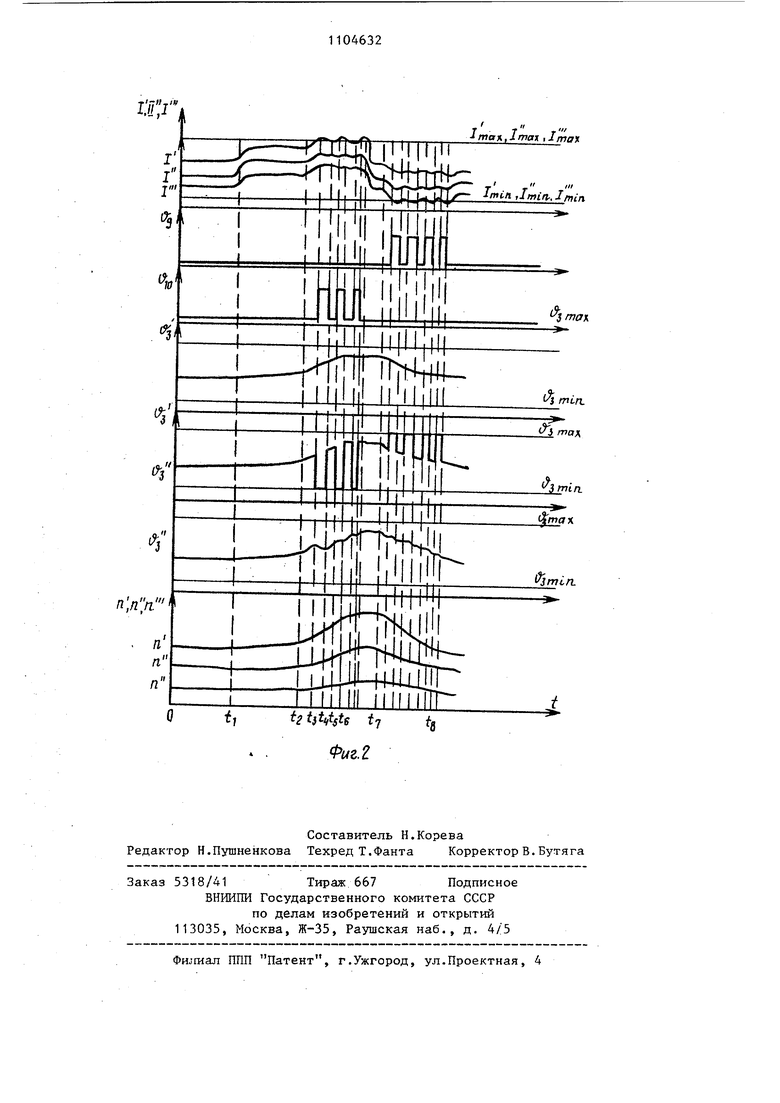
Изобретение относится к электротехнике и может быть использовано, например, в системах регулирования скорости электроприводов непрерывных прокатных станов, линий для произврд ства полимерных пленок, а также в бу магоделательных машинах. Известен многодвигательный электропривод, в котором задаются скорост электроприводов, а также изменяется соотношение задания двух смежных приводов, без изменения соотношения заданий двух других приводов 1 . Недостатком устройства является то, при изменении задания скорое ти, например при разгоне многодвигательного электропривода, возникает динамическая ошибка, что приводит к нарушению заданного соотношения скоростей многодвигательного электро привода. Наиболее близким к изобретению по технической сущности является многодвигательный электропривод, содержащий двигатели постоянного тока с регуляторами скорости, подключенными к блоку задания скоростей много двигательного электропривода С2 . Недостатком известного устройства является то, что не обеспечивается поддержание заданного соотношения скоростей в наиболее тяжелых динамических режимах регулирования, например , когда один или несколько двигателей работают в режиме отсечки тока якоря или на выбеге. Цель изобретения - повьш1ение точности регулирования в динамических режимах. Поставленная цель достигается тем, что в многодвигательный электро привод, содержащий электродвигатели постоянного тока с регуляторами скорости, подключенными к блоку задания скоростей многодвигательного электро привода, введены датчики тока якоря двигателя, блоки сравнения с минимально допустимым током якоря двигателя н блоки сравнения с максимально допустимым током якоря двигателя с нуль-органами по числу двигателей, два логических элемента ИЛИ, блок коммутации и фильтр, причем каждый датчик тока якоря двигателя подключе к соответствующему блоку сравнения с минимально допустимым током якоря двигателя и блоку сравнения с максимально допустимым током якоря двигателя, выходы блоков сравнения с мини мально допустимым током якоря двигателя через нуль-органы соединены с входами первого логического элемента ИЛИ, выходы блоков сравнения с максимально допустимым током якоря двигателя через нуль-органы соединены с входами второго логического элемента ИЛИ, выходы первого и второго логических элементов ИЛИ подключены к управляющим входам блока коммутации, входы задания которого подключены соответственно к шинам задания, максимального задания и минимального задания,а выход - к входу фильтра, выход которого соединен с входом блока задания скоростей многодвигательного привода. Поставленная цель достигается также тем, что блок коммутации содержит логический элемент ИЛИ-НЕ и три ключа, входы и выходы которых образуют соответственно входы задания и выход блока коммутации, управляющие входы которого подключены к управляющим входам первого и третьего ключей непосредственно, а к управляющему входу второго ключа - через логический элемент ИЛИ-НЕ. На фиг. 1 приведена блок-схема многодвигательного электропривода; на фиг. 2 - диаграмма его работы. Многодвигательный электропривод содержит электродвигатели 1 постоянного тока, приводящие во вращение валки 2 и подключенные к регуляторам 3 скорости, которые соединены с блоком 4 задания скоростей многодвигательного электропривода. Выход каждого датчика 5 тока якоря двигателя подключен к входам бло.ка 6 сравнения с минимально допустимым током якоря двигателя и блока 7 сравнения с максимально допустимым током якоря двигателя, которые через нуль-органы 8, представляющие собой компараторы, соединены с входами первого логического элемента ИЛИ 9 и второго логического элемента ИЛИ 10 соответственно. Выходы логических элементов ИЛИ 9 и 10 подключены к управляющим входам блока 11 коммутации, входы задания которого подклюены соответственно к шинам задания, максимального задания и минимального задания. Выход блока 11 коммутации через фильтр 12 подключен к входу эталонного задания блока 4 задания скоростей многодвигательного электрс привода. 3 Блок 11 коммутации содержит логический элемент ИЛИ-НЕ 13 и три ключа 14 - 16, причем управляющий вход первого ключа 14 соединен с управляю щим входом блока 11 коммутации, подключенного к выходу первого логического элемента ИЛИ 9, управляющий вхо третьего ключа 16 соединен с управляющим входом блока 11 коммутации, подключенного к выходу второго логического элемента ИЛИ 10, а управляющий вход второго ключа 15 соединен с выходом логического элемента ИЛИ-НЕ 13, первый и второй входы которого соединены с управляющими входами блока 11 коммутации. Коммутируемые входы ключей 14 - 16 подклю чены через входы задания к шинам максимального задания, задания и минимального задания соответственно а их выходы соединены между собой и подключены к выходу блока 11 коммутации . Работает многодвигательный электропривод следующим образом. В исходном, установившемся режиме работы многодвигательного электропривода (интервал О, t, фиг. 2), на выходах датчиков 5 тока якорей двигателей (фиг. 1) присутствуют сигналы, пропорциональные нагрузкам соответствующих двигателей, при этом соблюдаются неравенства : . mm - moix где Э, Э, J --сигналы на выходах датчиков 5 тока як рей соответствующих двигателей; j , ,j . J. - уставки минимально mi п tnifi mm го тока якорей соответствующих двиг телей; :;;«,, J,- уставки максимального тока якорей соответствующих дв гателей . Сигналы на выходах всех нуль-органов 8 и, следовательно, на выхода логических элементов ИЛИ 9 и ЮТИ 10 отсутствуют. В этом случае нулевые сигналы на входах управления блока 11 коммутации поступают на управ ляющие входы первого и третьего ключей 14 и 16, отключая шины макси 2 мального задания V и минимального задания V. от выхода. В то же время сигнал на выходе логического элемента ИЛИ-НЕ 13 равен сигналу логической единицы, второй ключ 15 включен, и сигнал на выходе блока 11 коммутации Vj равен сигналу на шине задания Vj, а сигнал V на выходе фильтра 12 - УЗ , т.е. v;; v; v,. Частота вращения двигателей п , п , п при этом не изменяется. В процессе регулирования (интервал времени t, t , фиг. 2) при переводе технологической линии на другую скорость, если выполняются неравенства (1), то исходное состояние системы не изменяется и многодвигательный электропривод изменяет скорости п , п , п в соответствии и по закону, определяемому изменением сигнала задания Vg. Если( в процессе регулирования п , п , п Ускорения достигают таких величин, что ток якоря какого-либо из двигателей (это зависит от величины нагрузок двигателей многодвигательного электропривода) достигает своего максимального (при разгоне) или минимального (при торможении) значений, т.е. например, при t I lfnQ, то на выходе блока 7 сравнения с максимально допустимым током данного двигателя (фиг. 1) появляется нулевой сигнал, соответствующий нуль-орган 8 срабатывает и сигнал логической единицы с его выхода через второй логический элемент ИЛИ 10 (Ущ) поступает на один из управляющих входов блока 11 коммутации и, воздействуя через логический элемент ИЖ-НЕ 13 на второй ключ 15, отключает шину задания с сигналом задания V от выхода, подключая через третий ключ 16 сигнал с шины минимального задания на выход блока 11 коммутации. Сигнал падает-скачком с V до V.j,, , следовательно,сигнал Vj начинает снижаться, что приводит к уменьшению темпа разгона многодвигательного электропривода. Как только ток якоря наиболее загруженного двигателя уменьшится (момент времени t, фиг. 2 ), т.е. станет вьтолняться неравенство (1) и устройство вернется в исходное состояние и V будет увеличиваться до Vj V. Если ток одного из двигателей снова достигнет своего максимально допустимого .значения , то цикл работы устройства повторится (tj.,t). Аналогичным образом устройство работает и при снижении скорости многодвигательног электропривода, когда ток якоря одного из двигателей становится равным минимально допустимому току (интервал времени t. В этом случае появляется сигнал Vg на выхо де первого логического элемента ИЛИ (фиг.1), который через логический элемент ИЛИ-НЕ 13 отключает выход блока 11 коммутации от шины задания (Vj) и через первый ключ 14 подключает к входу шину максимального задания (V,,) , тем самым снижая темп изменения. Таким образом, при достижении ускорения максимально возможных величин, при которых возможно поддержида. 26 вать соотношение скоростей двигателей в многодвигательном электроприводе, ток одного из двигателей достигает своего максимального или минимального значения, система начина ет работать в переключающем режиме , обеспечивая автоматическую настройку темпа изменения сигнала на входе эталонного задания блока задания скоростей многодвигательного электропривода на максимально возможный, который обеспечивает многодвигательный электропривод. Использование изобретения позволяет уменьшить брак за счет обеспечения поддержания соотношения скоростей двигателей технологической линии и повысить производительность линий за счет автоматического поддержания максимального темпа при разгоне и торможении многодвигательного приво
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1984 |
|
SU1159144A2 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
| Электропривод постоянного тока | 1981 |
|
SU957402A1 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
1. МНОГОДВИГАТЕЛЬНЬЙ ЭЛЕКТРОПРИВОД, содержащий электродвигатели постоянного тока с регуляторами скорости, подключенными к блоку задания скоростей многодвигательного электропривода, отличающийся тем, что, с целью повьшения точности регулирования в динамических режимах, в него введены датчики тока якоря двигателей, блоки сравнения с минимально допустимым током якоря двигателя и блоки сравнения с максимально допустимым током якоря двигателя с нуль-органами по числу двигателей, два логических элемента ИЛИ, блок коммутации и фильтр, причем каждый датчик тока якоря двигателя подключен к соответстйующим блоку сравнения с минимально допустимым током якоря двигателя и блоку сравнения с максимально допустимым током якоря двигателя, выходы блоков сравнения с минимально допустимым током якоря двигателя через нуль-органы соединены с входами первого логического элемента ИЛИ, выходы блоков сравнения с максимально допустимым током якоря двигателя через нуль-органы соединены с входами второго логического элемента ИЛИ, выходы первого и второго логических элементов ИЛИ подключены к управляющим входам блока коммутации, входы задания которого подключены соответственно к шинам зада§ ния, максимального задания и минимального задания, а выход - к входу (Л фильтра, выход которого соединен с входом блока задания скоростей многодвигательного электропривода. 2. Электропривод по п. 1, отличающийся тем, что блок коммутации содержит логический элемент ИЛИ-НЕ и три ключа, входы д выходы которых образуют соответст венно входы задания и выход блока О5 коммутации, управляющие входы котооо to рого подключены к управляющим входам первого и третьего ключей непосредственно, а к управляющему входу второго ключа - через логический элемент ИЛИ-НЕ.
СКЕК ....
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для задания скоростей многодвигательного электропривода | 1972 |
|
SU534841A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе | 1977 |
|
SU746853A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
