Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, и может найти применение для управления многодвигательными электроприводами с независимым или последовательным возбуждением двигателей, в частности, на электрифицированных транспортных средствах.
В электрической тяге широкое применение получили электроприводы, содержащие два или более тяговых двигателей постоянного тока, импульсные преобразователи (ИП) с системой широтно-импульсного регулирования и набор дополнительных силовых ключей (контактных или же бесконтактных) для изменения конфигурации силовой части привода при реверсе и переходах из тягового режима в тормозной и обратно (см., например, патент Швеции №321262, B60L 7/12; патент РФ № 2332316, B60L 15/00).
Известны также электроприводы постоянного тока с системой управления, выполненной по структуре подчиненного регулирования с релейным регулятором тока во внутреннем контуре (см. Шенфельд Р., Хабигер Э. Автоматизированные электроприводы: Пер. с нем./Под ред. Ю.А. Борцова. Л.: Энергоатомиздат. Ленингр. отделение, 1985, с.275-276). Устройство управления в такой системе содержит задающий элемент и датчик угловой скорости, вырабатывающие сигналы, пропорциональные заданному и фактическому значениям угловой скорости, элемент сравнения указанных сигналов, выход которого соединен с входом регулятора угловой скорости, датчик тока, элемент сравнения выходных сигналов регулятора угловой скорости и датчика тока и релейный элемент, вырабатывающий сигналы на включение и выключение полупроводникового ключа в цепи питания электродвигателя. В состав регулятора скорости, как правило, вводят элемент ограничения уровня выходного сигнала.
При разработке систем управления многодвигательными тяговыми электроприводами одной из важных задач является выравнивание токовых нагрузок электродвигателей, особенно при жестких тяговых характеристиках, когда из-за неравенства диаметров колесных пар и разброса параметров двигателей может происходить недопустимо большое перераспределение нагрузок между ними (см. Орлов Ю.А. Управление тяговым приводом с двигателями независимого возбуждения на электровозах переменного тока / Электротехника, 2010. №3. С.33-37).
В системах управления электроприводов с широтно-импульсным регулированием эта задача может быть решена путем автоматического индивидуального подрегулирования коэффициентов заполнения напряжений питания электродвигателей на основании информации о величинах расхождения их токовых нагрузок (см. Сташинов Ю.П. Компьютерное моделирование тягового привода рудничного электровоза на базе двигателей с независимыми обмотками возбуждения / Вестник Всероссийского научно-исследовательского и проектно-конструкторского института электровозостроения. Вып.1(61). - Новочеркасск. 2011. С.155-169). Однако такое решение приводит к существенному усложнению системы управления многодвигательными электроприводами.
Другая важная задача при разработке систем управления электроприводами - реализация автоматического перехода из двигательного режима в режим электрического торможения и обратно с поддержанием заданного значения скорости при поступлении команды на снижение скорости или же изменении знака момента нагрузки, например, при движении транспортного средства, оборудованного тяговым электроприводом, на сложном профиле пути.
Техническим эффектом данного предложения является упрощение системы управления многодвигательными электроприводами с обеспечением автоматического выравнивания токовых нагрузок электродвигателей, а также поддержание заданного значения скорости с автоматическим переходом двигателей из двигательного в тормозной режим и обратно при изменении заданного значения скорости и знака моментов нагрузки.
Для достижения указанного технического эффекта в состав устройства введен логический блок, входы которого соединены с задающим элементом и датчиком угловой скорости Ωi одного из электродвигателей, а на выходе формируются сигналы управления ключевыми элементами, изменяющими конфигурацию силовой схемы электропривода в соответствии с алгоритмом: Ω0>0 и Ωi≥0 - движение «вперед»; Ω0<0 и Ωi≤0 - движение «назад»; abs(Ω0)-abs(Ωi)>0 - двигательный режим; abs(Ω0)-abs(Ωi)<0 - тормозной режим; Ω0=0 и Ωi=0 - останов, при этом регулятор угловой скорости снабжен модулем выделения абсолютного значения выходного сигнала, а входы всех релейных регуляторов тока подсоединены к выходу регулятора скорости через компараторы, вторые входы которых соединены с датчиками тока через модули выделения абсолютных значений формируемых ими сигналов.
Суть предложения поясняется чертежом, на котором изображена функциональная схема предлагаемого устройства управления многодвигательными электроприводами постоянного тока.
Устройство содержит задающий элемент 1, датчик 2 угловой скорости Q одного из электродвигателей и компаратор 3, подающий сигнал, пропорциональный отклонению скорости от заданного значения, на вход регулятора скорости 4 в составе усилителя 5, ограничителя 6 и модуля 7 выделения абсолютного значения выходного сигнала регулятора. К выходу регулятора скорости подсоединены входы всех релейных регуляторов 8.1-8.N токов двигателей через компараторы 9.1-9.N, вторые входы которых по цепям отрицательных обратных связей соединены с датчиками токов 10.1-10.N через модули 11.1-11.N выделения абсолютных значений сигналов, пропорциональных мгновенным значениям токов I1-IN электродвигателей. Релейные регуляторы формируют сигналы Y1-YN управления силовыми ключами в цепях питания электродвигателей. Вход логического блока 12 соединен с выходами задающего элемента 1 и датчика скорости 2, а на его выходе формируются сигналы U управления бесконтактными или контактными ключами для изменения конфигурации силовой схемы электропривода при реверсе двигателей и переходе их из двигательного в тормозной режим работы и обратно согласно заданному алгоритму.
Работает устройство следующим образом. При поступлении воздействия от задающего элемента в зависимости от его полярности логический блок формирует на выходе сигналы на включение электродвигателей для движения «вперед» или «назад». На выходе регулятора угловой скорости появляется задающее воздействие для релейных регуляторов 8.1-8.N на уровне ограничения элемента 6, и двигатели разгоняются с поддержанием их токов на соответствующем максимальном уровне.
При снижении по мере разгона величины ΔΩ=Ω0-Ωi до некоторого малого значения, определяемого величиной коэффициента усиления регулятора угловой скорости, элемент 6 выходит из режима насыщения, и дальнейший разгон электродвигателей происходит с уменьшением величины выходного сигнала регулятора скорости, а следовательно, и с уменьшением токов двигателей до выхода на установившийся режим работы. Силовые ключи в цепях питания двигателей, управляемые выходными сигналами релейных регуляторов тока, при расхождении по любой причине угловых скоростей двигателей переключаются асинхронно, но с поддержанием равенства токов, поскольку задающее воздействие для всех регуляторов токов одинаково.
При изменении задающего воздействия в сторону увеличения происходит дальнейший разгон электродвигателей до нового установившегося состояния со стабилизацией токов на установленном уровне ограничения.
Появление отрицательных моментов сопротивления на валах электродвигателей, например, при движении транспортного средства, оборудованного многодвигательным тяговым электроприводом, на самокатном участке пути приведет к росту угловой скорости ΩI, и при выполнении условия abs(Ω0)-abs(Ωi)<0 логический блок 12 сформирует выходные сигналы U на ключевые элементы, которые изменят конфигурацию силовой схемы электропривода для перевода двигателей в тормозной режим работы. При этом, благодаря модулям выделения абсолютных значений 7, 11.1-11.N система будет поддерживать угловую скорость Ωi с некоторой ошибкой на заданном уровне аналогично тому, как она выполняет эту функцию в двигательном режиме, с автоматическим выравниванием токов электродвигателей.
При изменении величины задающего воздействия в сторону уменьшения по условию abs(Ω0)-abs(Ωi)<0 логический блок 12 сформирует выходные сигналы U на ключевые элементы, которые изменят конфигурацию силовой схемы электропривода для перевода двигателей в тормозной режим работы. Происходит снижение угловых скоростей электродвигателей с поддержанием токов на максимальном уровне в течение времени, пока элемент 6 работает в режиме ограничения выходного сигнала. Затем торможение продолжается с постепенным снижением токов электродвигателей при их автоматическом выравнивании. При появлении условия abs(Ω0)-abs(Ωi)>0 логический блок 12 посредством выходных сигналов U и ключевых элементов восстановит конфигурацию силовой схемы электропривода для двигательного режима, и электропривод продолжит работу с автоматическим поддержанием с некоторой ошибкой угловой скорости i-го двигателя на новом заданном уровне.
Реализация системы управления электропривода по структуре подчиненного регулирования с релейными регуляторами тока обеспечивает высокое качество переходных процессов при больших величинах коэффициента усиления регулятора скорости, что позволяет обеспечить необходимую точность стабилизации скорости на заданном уровне как в двигательном, так и в тормозном режимах работы, без необходимости использования интегральной составляющей в регуляторе скорости.
Таким образом, применение в устройстве управления логического блока, модулей ограничения выходных сигналов в регуляторе угловой скорости и на выходах датчиков токов, а также подключение входов всех релейных регуляторов тока к выходу одного регулятора угловой скорости обеспечило достижение заявленного технического эффекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2016 |
|
RU2624266C1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ управления током асинхронного двигателя при питании от автономного инвертора напряжения | 2018 |
|
RU2679831C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2413635C1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Способ управления вентильнымМНОгОдВигАТЕльНыМ элЕКТРОпРиВО-дОМ пОСТОяННОгО TOKA | 1977 |
|
SU803096A1 |
| МАЛОВЕНТИЛЬНЫЙ ЧЕТЫРЁХКВАДРАНТНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2017 |
|
RU2660187C1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
Изобретение относится к электроприводам транспортных средств. Устройство для управления многодвигательными электроприводами постоянного тока содержит релейные регуляторы и датчики токов электродвигателей, задающий элемент, датчик угловой скорости одного из электродвигателей и компаратор. Выходной сигнал компаратора пропорционален отклонению угловой скорости Ωi от заданного значения Ω0. В состав устройства введен логический блок, соединенный с задающим элементом и датчиком угловой скорости. Силовая схема электропривода изменяется в соответствии с алгоритмом: Ω0>0 и Ω≥0 - движение «вперед»; Ω0<0 и Ω≤0 -движение «назад»; abs(Ω0)-abs(Ω)>0 - двигательный режим; abs(Ω0)-abs(Ω)<0 - тормозной режим; Ω0=0 и Ω=0 - останов. Регулятор угловой скорости снабжен модулем выделения абсолютного значения выходного сигнала. Достигается автоматическое выравнивание токовых нагрузок электродвигателя и упрощение устройства. 1 ил.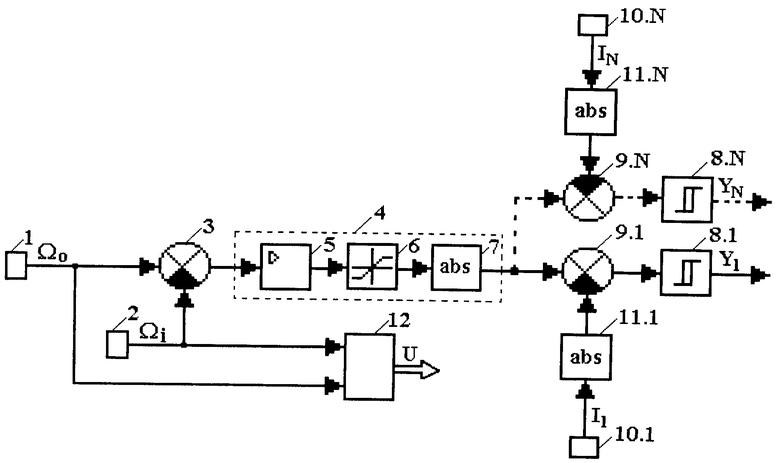
Устройство для управления многодвигательными электроприводами постоянного тока, содержащее релейные регуляторы и датчики токов электродвигателей, задающий элемент, датчик угловой скорости одного из электродвигателей и компаратор, выходной сигнал которого, пропорциональный отклонению угловой скорости Ωi от заданного значения Ω0, поступает на вход регулятора угловой скорости, отличающееся тем, что в состав устройства введен логический блок, входы которого соединены с задающим элементом и датчиком угловой скорости, а на выходе формируются сигналы управления ключевыми элементами, изменяющими конфигурацию силовой схемы электропривода в соответствии с алгоритмом: Ω0>0 и Ω≥0 - движение «вперед»; Ω0<0 и Ω≤0 -движение «назад»; abs(Ω0)-abs(Ω)>0 - двигательный режим; abs(Ω0)-abs(Ω)<0 - тормозной режим; Ω0=0 и Ω=0 - останов, при этом регулятор угловой скорости снабжен модулем выделения абсолютного значения выходного сигнала, а входы всех релейных регуляторов тока подсоединены к выходу регулятора скорости через компараторы, вторые входы которых соединены с датчиками тока через модули выделения абсолютных значений формируемых ими сигналов.
| RU 2060173 C1, 20.05.1996 | |||
| КОМБИНИРОВАННЫЙ СИЛОВОЙ ЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ ДЛЯ АВТОМОБИЛЯ И ТРАКТОРА С ЭЛЕКТРОТРАНСМИССИЕЙ И МОТОР-КОЛЕСАМИ (ВАРИАНТЫ) | 2001 |
|
RU2184040C1 |
| US 4276951 A, 07.07.1981 | |||
| Способ приготовления годных дисперсией нитроцеллюлозы и других эфиров целлюлозы | 1933 |
|
SU41679A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕАКТИВНОЙ СИЛОЙ АКСЕЛЕРАТОРА | 2009 |
|
RU2466881C2 |

