Область техники, к которой относится изобретение
Изобретение относится к диагностике технических систем и может быть использовано для контроля и диагностики различных бензиновых и дизельных двигателей и/или трансмиссии автомобилей, сельхозмашин и специальной техники в процессе их изготовления, технического обслуживания и/или ремонта, а так же для диагностирования промышленного оборудования и технических систем, к которым могут быть отнесены подшипники электродвигателей, ленточные конвейеры, промышленные вентиляторы и т.п. Также данное изобретение может использоваться для контроля и диагностики биологических объектов, например для контроля шума в легких человека или животного.
Уровень техники
Известно устройство для диагностики подшипников, содержащее механический узел для загрузки, перемещения и вращения изделия, аналого-цифровой преобразователь (АЦП), быстрый преобразователь Фурье, определитель частоты и ЭВМ с заложенными в памяти пороговыми значениями сигналов, при этом механический узел дополнительно содержит устройство для обеспечения сканирования контролируемых поверхностей изделия, преобразователь выполнен вихретоковым накладным, его выход последовательно связан с параметрическим генератором высокой частоты, усилителем, детектором, катодным повторителем и многоходовым аналого-цифровым преобразователем, выходы которого последовательно связаны не менее чем с одним блоком сравнения пороговых значений сигнала, который состоит из полосового фильтра, быстрого преобразователя Фурье, амплитудного селектора, регистратора брака и годных деталей и дисплея ЭВМ, причем полосовой фильтр и амплитудный селектор каждого из блоков сравнения настроены на определенные пороговые значения частот (см. патент РФ №2138032, кл. G01М 13/04, 1999).
Недостатками аналога являются невысокие технологические возможности при диагностике подшипников, заключающиеся в невысокой точности оценки, а также низкой производительности процесса контроля.
Так же известен способ диагностирования поршневой машины, преимущественно двигателя внутреннего сгорания, заключающийся в сравнении спектров шума, получаемых по углу поворота коленчатого вала исследуемого и эталонного двигателей, нахождении аномально работающего цилиндра и определении его неисправностей, по которому для снижения трудоемкости и сокращения времени диагностирования аномально работающий цилиндр находят по спектру газодинамического шума за срезом выхлопной трубы, а неисправности определяют по замерам звукового спектра в местах предполагаемых повреждений [А.с. СССР N 731341, G01 М 15/00, БИ N 16 от 30.04.80].
К недостаткам данного способа относятся ограниченные возможности диагностирования двигателя, которые заключается в том, что для обнаружения неисправностей определяются только мгновенные спектры, то есть спектры на конечном интервале, что вызывает необходимость использования "окна" наблюдения и приводит к искажениям спектральной картины, ее недетерминированности и сложности создания программ распознавания состояний объекта по недетерминированному представлению сигнала.
Наиболее близким по технической сущности и достигаемому при использовании техническому результату (прототипом для устройства) является устройство для диагностики и контроля технического состояния механизмов транспортных и стационарных систем содержащее датчики шума установленные на контролируемом объекте, блок временной дискретизации, блок коммутации каналов измерения, блок фиксации уровней шума, блок дискретного преобразования Фурье, базы уровней шума, блок фиксации состояний, определитель уровней шума, определитель образа состояния, базу образов состояния, блок фиксации динамики состояния, блок статистического анализа динамики состояний, интерфейс для связи с компьютером, монитор (Патент на изобретение №2545250, G01M, «ИЗОБРЕТЕНИЯ ПОЛЕЗНЫЕ МОДЕЛИ» №9-2015, 27.03.2015).
Недостатками прототипа являются отсутствие контроля силы исследуемого звука и частоты основной (первой) гармоники, что снижает эффективность диагностики технических систем.
Раскрытие изобретения
Задачей технического решения изобретения является расширение области применения устройства контроля и диагностирования транспортных и стационарных систем путем корректировки базы данных образов состояния в процессе эксплуатации и прогнозирования надежности узлов по результатам постоянного контроля. Техническое решение изобретения простое в изготовлении и эксплуатации, позволяющее быстро и однозначно определять состояние исследуемой системы и самостоятельно регистрировать и характеризовать новые неизвестные состояния системы.
Поставленная задача решается благодаря тому, что в состав известного устройства для диагностики и контроля технического состояния механизмов подвижных и стационарных систем, содержащего датчики (микрофоны), установленные на контролируемом объекте, блок коммутации каналов измерения, блок определения образа состояния, блок временной дискретизации, аналого-цифровой преобразователь, блок дискретного преобразования Фурье, фиксатор состояния, база образов состояний, блок фиксации динамики состояний, блок статистического анализа динамики состояния, монитор и интерфейс для связи с компьютером, были добавлены фиксатор уровня шума, база уровней шума и определитель вида уровня шума, а также база частоты и определитель вида частоты.
Техническим результатом, на который направлено данное изобретение, является повышение точности оценки технического состояния механизмов транспортных и стационарных систем и более качественное определение параметров конкретного дефекта, образовавшегося в результате неправильного монтажа, эксплуатации и/или ремонта, а также снижение стоимости и увеличение скорости диагностирования.
Отличительными признаками является то, что устройство для диагностики и контроля технического состояния механизмов транспортных и стационарных систем содержит базу образов состояния, где хранятся данные образов (амплитуд гармоник сигналов снятых с микрофонов) как минимум с тремя доверительными интервалами для надежности оценки 0,99, 0,95 и 0,9 и базы частоты, уровней шума для каждого состояния. После обкатки систем (особенно это характерно для движущихся объектов) данные, занесенные в базу данных образов состояния и в базу уровней шума и частоты в начале эксплуатации, корректируются по основным состояниям на основе данных функционирования объекта.
Техническое решение позволяет создать простое, надежное, оперативное устройство для диагностики и контроля технического состояния механизмов транспортных и стационарных систем в процессе их изготовления, технического обслуживания и/или ремонта.
Техническая сущность предложенного технического решения поясняется чертежами, на которых:
Фиг. 1. Структурная схема устройства.
Фиг. 2. Структурная схема датчика шума.
Фиг. 3. Структурная схема блока временной дискретизации.
Фиг. 4. Структурная схема блока коммутации каналов.
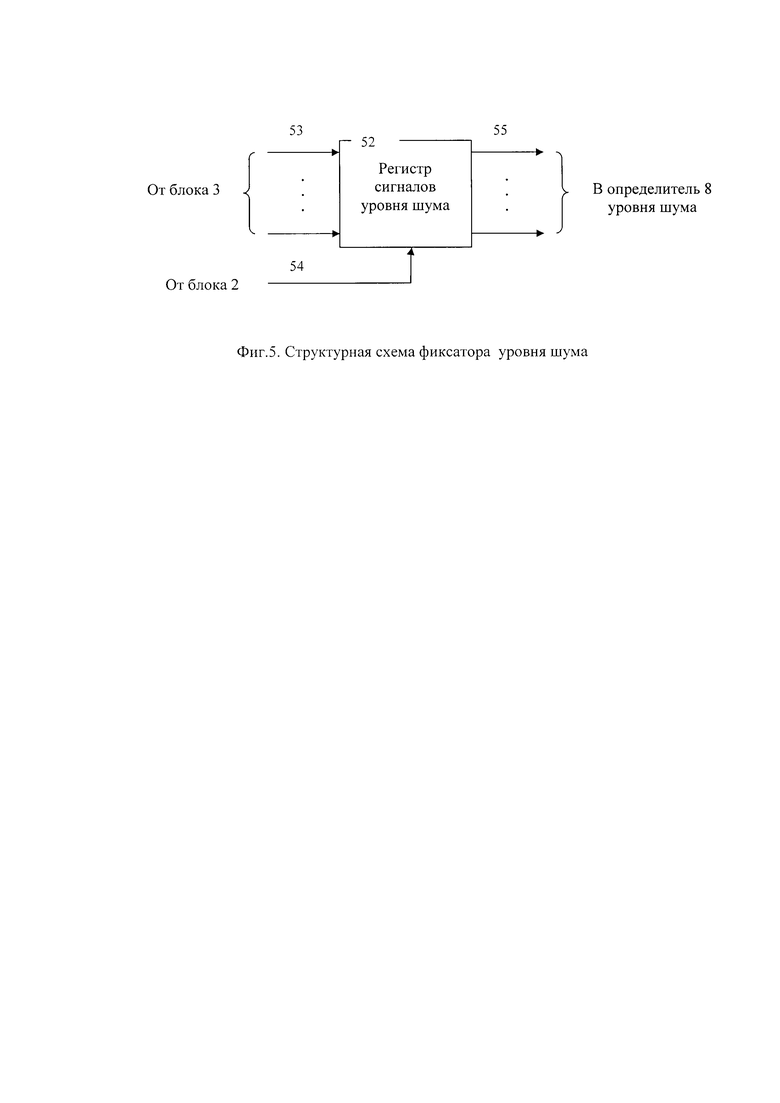
Фиг. 5. Структурная схема фиксатора уровней шума.
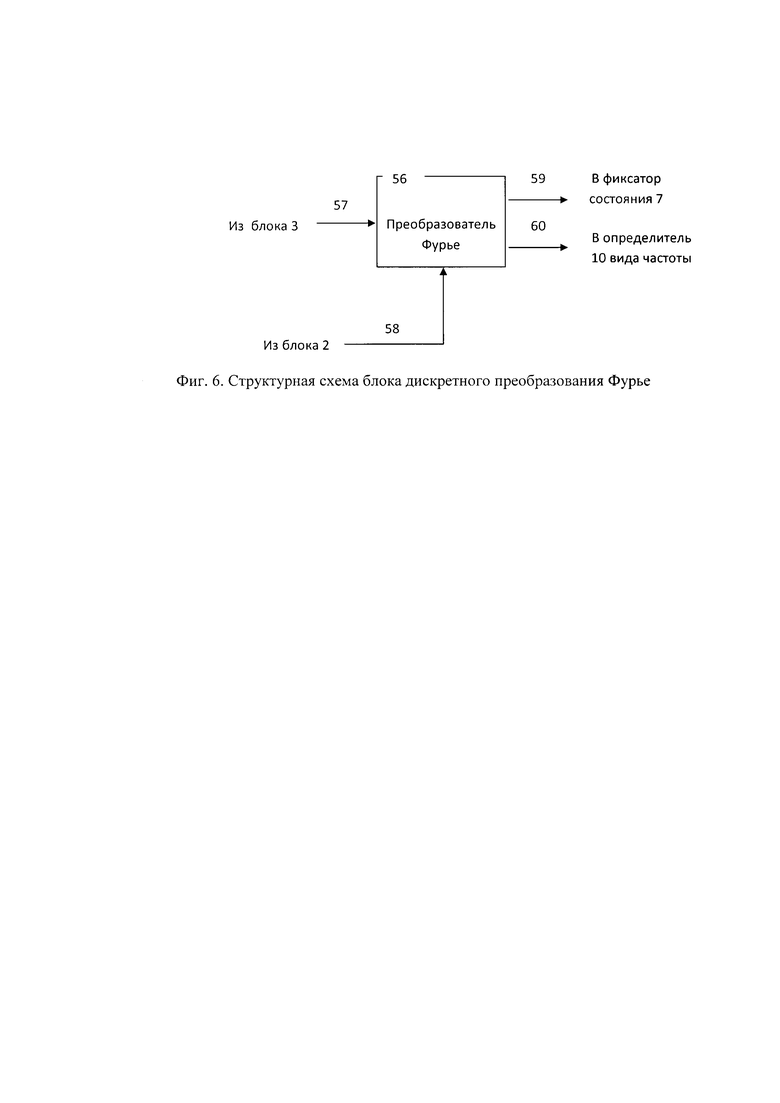
Фиг. 6. Структурная схема блока дискретного преобразования Фурье.
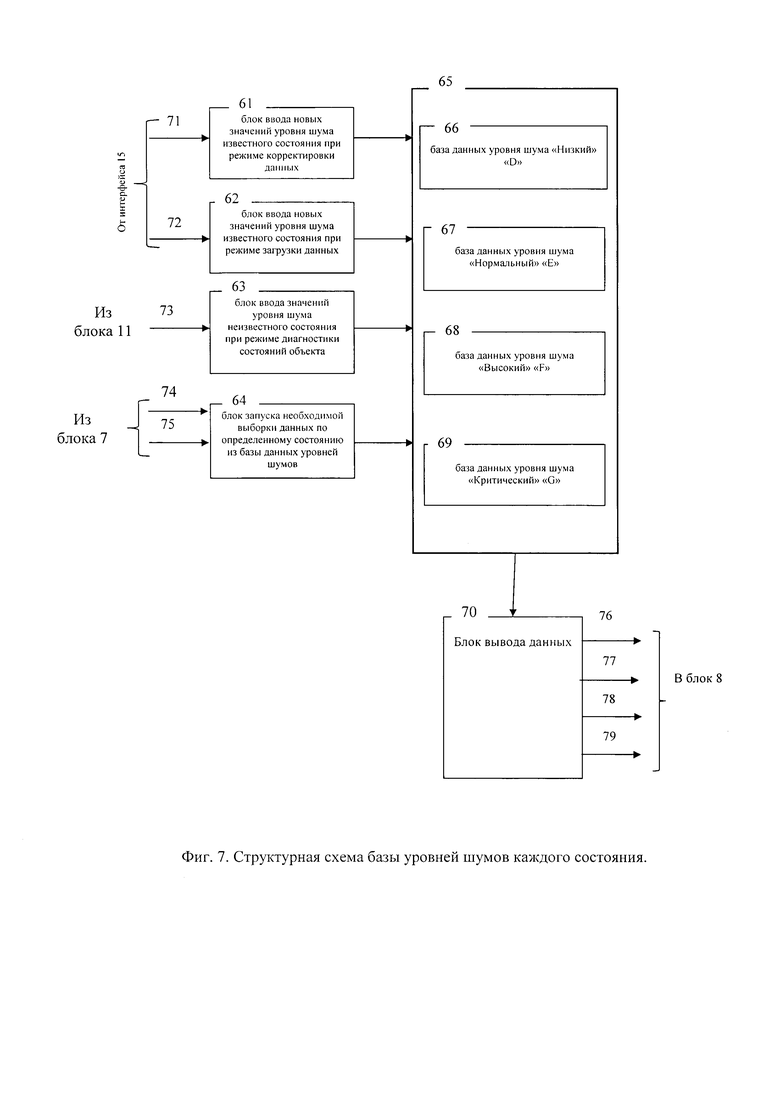
Фиг. 7. Структурная схема базы уровней шума.
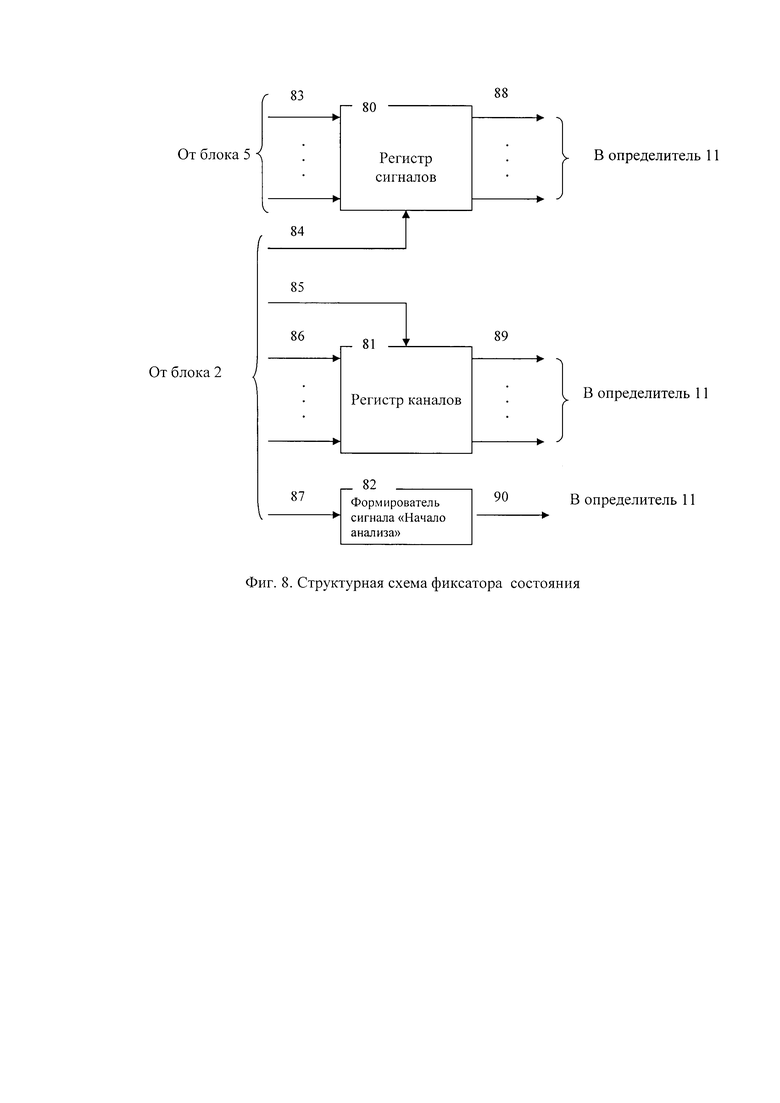
Фиг. 8. Структурная схема фиксатора состояния.
Фиг. 9. Структурная схема определителя вида уровней шума.
Фиг. 10. Структурная схема базы частоты.
Фиг. 11. Структурная схема определителя вида частоты.
Фиг. 12. Структурная схема определителя образа состояния.
Фиг. 13. Структурная схема базы образов состояний.
Фиг. 14. Структурная схема блока фиксации динамики состояний.
Фиг. 15. Структурная схема блока статистического анализа динамики состояния.
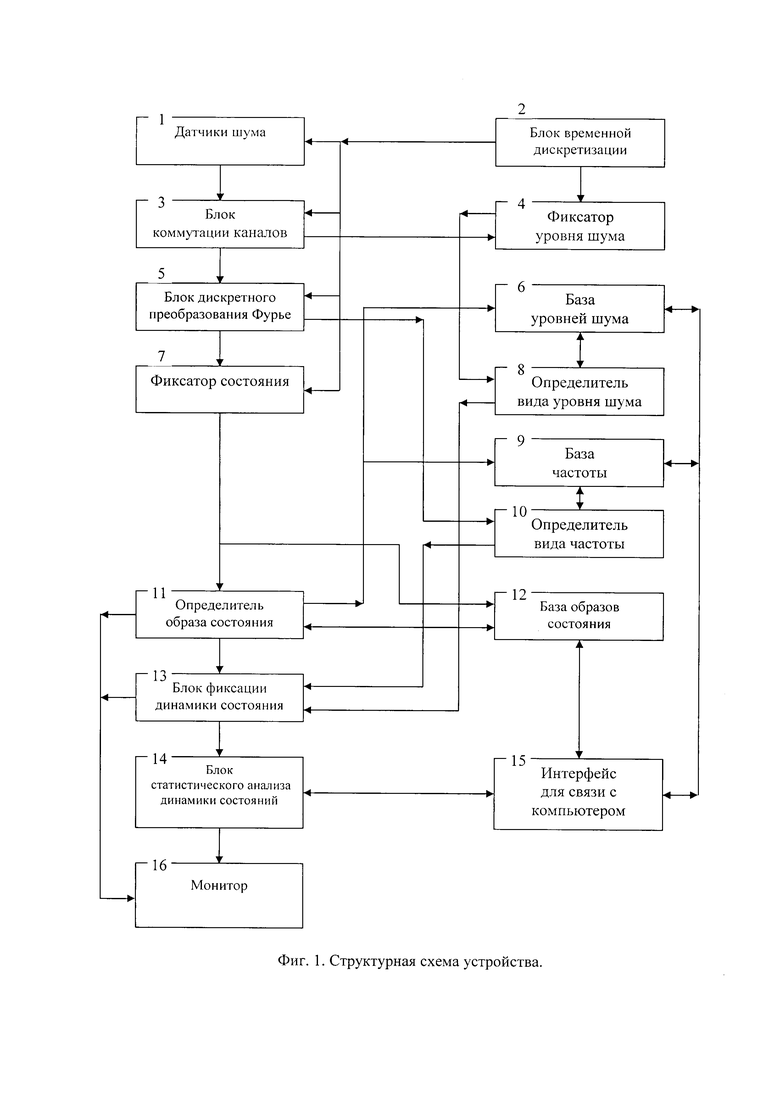
На фиг. 1 представлена структурная схема устройства.
Устройство для диагностики и контроля технического состояния механизмов транспортных и стационарных систем содержит датчики шума 1 установленные на контролируемом объекте, блок 2 временной дискретизации, блок 3 коммутации каналов измерения, блок 4 фиксации уровней шума, блок 5 дискретного преобразования Фурье, базы 6 уровней шума, блок 7 фиксации состояний, определитель 8 уровней шума, базы 9 частоты, определитель 10 вида частоты, определитель 11 образа состояния, базу 12 образов состояния, блок 13 фиксации динамики состояния, блок 14 статистического анализа динамики состояний, интерфейс 15 для связи с компьютером, монитор 16.
Датчики 1 шума устанавливаются в местах непосредственной близости к исследуемому узлу контроля. Их количество выбирается по необходимости и возможностям устройства для диагностики и контроля технического состояния механизмов.
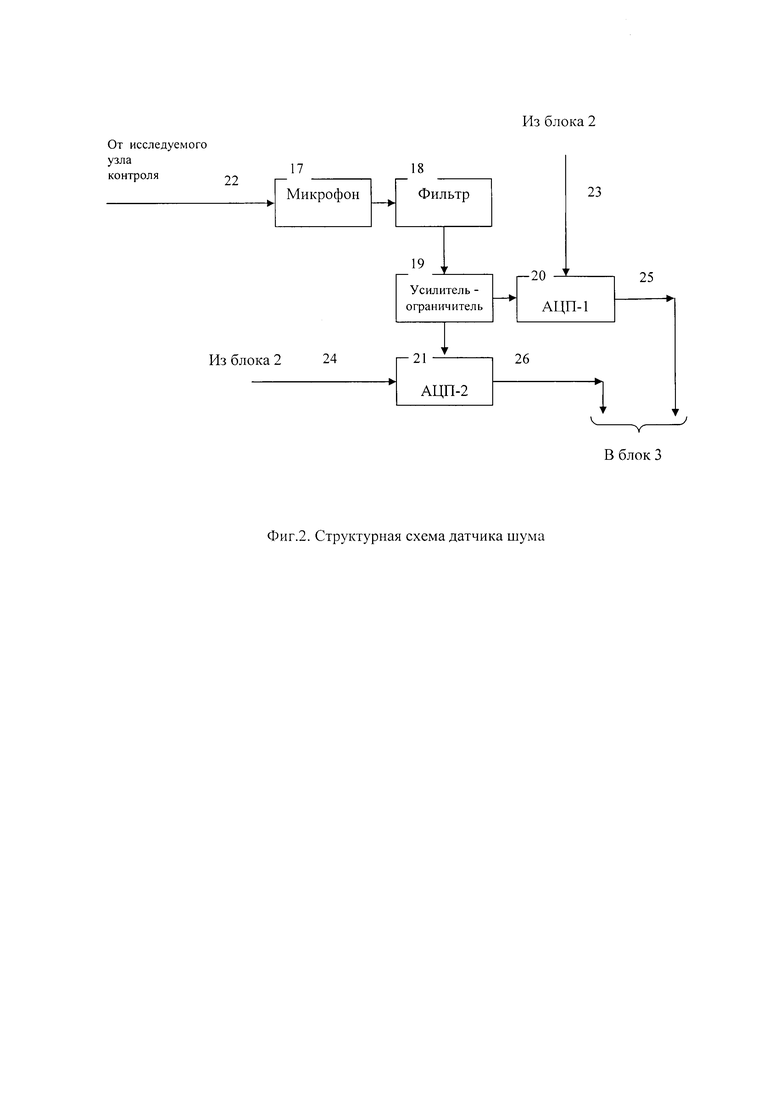
На фиг. 2 представлена структурная схема датчика шума.
Датчик 1 шума состоит из микрофона 17 (могут использоваться любые широкополосные микрофоны, но желательно использование направленных микрофонов) устанавливаемого на внешней стороне корпуса действующего механизма, линейного фильтра 18 низких частот, который выделяет составляющие, образованные источниками дефектов в диапазоне от 0.1-25 кГц, усилителя-ограничителя 19, который наряду с ограничением сигнала осуществляют усиление. Основой усилителя-ограничителя может быть любой усилитель (операционный или на транзисторах). При использовании операционных усилителей, цепь ограничения сигнала включается в обратную связь, где на резисторе обратной связи присутствует напряжение прямо-пропорциональное (или обратно-пропорциональное) уровню шума, которое подается на аналогово-цифровой преобразователь (АЦП-1) 20, а основной нормированный (фиксированный определенного уровня) сигнал шума подается на аналогово-цифровой преобразователь (АЦП-2) 21,. Сигналы шума поступают в микрофон 15 с узла контроля по входу 22, сигналы управления с блока 2 поступают в АЦП-1 20 по входу 23, а в АЦП-2 21 по входу 24, для синхронизации работы датчика шума 1 с блоком 5 дискретного преобразования Фурье. Выходные сигналы АЦП-1 в соответствующие моменты времени поступают с выхода 25, а сигналы АЦП-2 в соответствующие моменты времени поступают с выхода 26 в блок 3 коммутации каналов измерения.
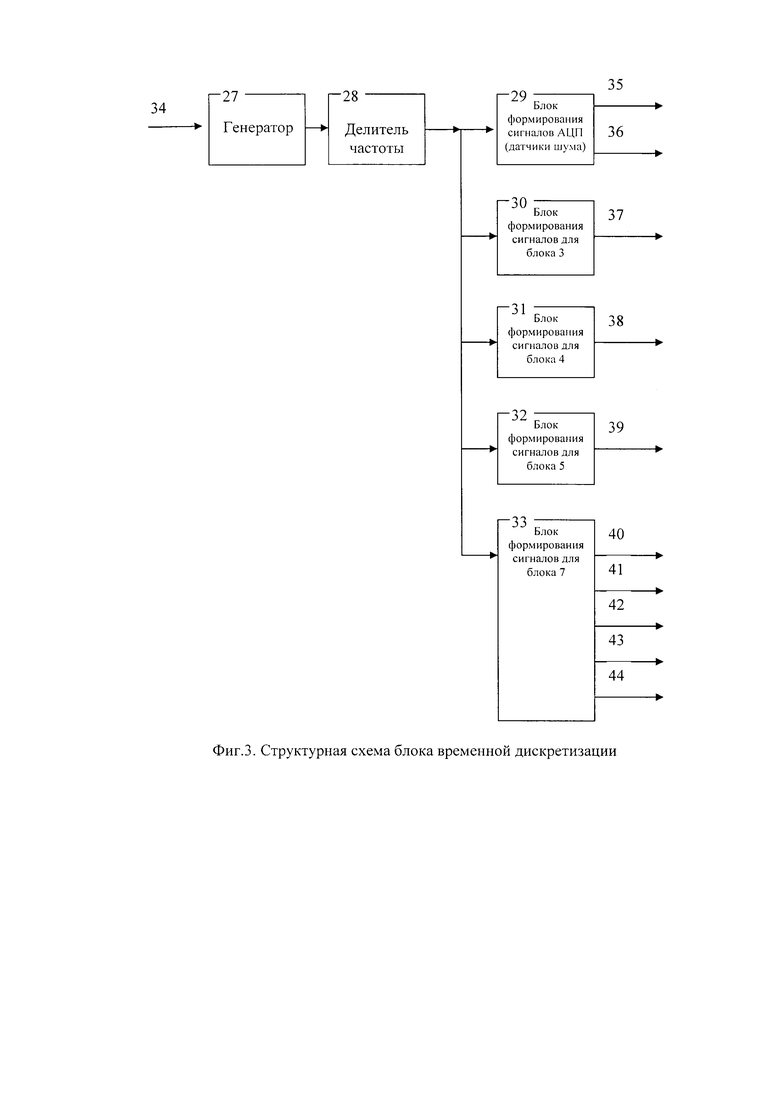
На фиг. 3 представлена структурная схема блока 2 временной дискретизации.
Блок 2 временной дискретизации состоит из генератора 27, делителя частоты 28, блока формирования сигналов АЦП датчиков 1 шума 29, блока 30 формирования сигналов для блока 3, блока 31 формирования сигналов для блока 4, блока 32 формирования сигналов для блока 5, блока 33 формирования сигналов для блока 7. Вход 34 служит для запуска системы в работу. Выходы 35, 36 соединены с соответствующими входами датчиков шума 1, выход 37 соединен с соответствующими входами блока 3 коммутации каналов, а выход 38 соединен с соответствующими входами фиксатора 4 уровня шума, выход же 39 соединен с соответствующими входами блока 5 дискретного преобразования Фурье. Выходы 40, 41, 42, 43, 44 соединены с соответствующими входами фиксатора 7 состояния.
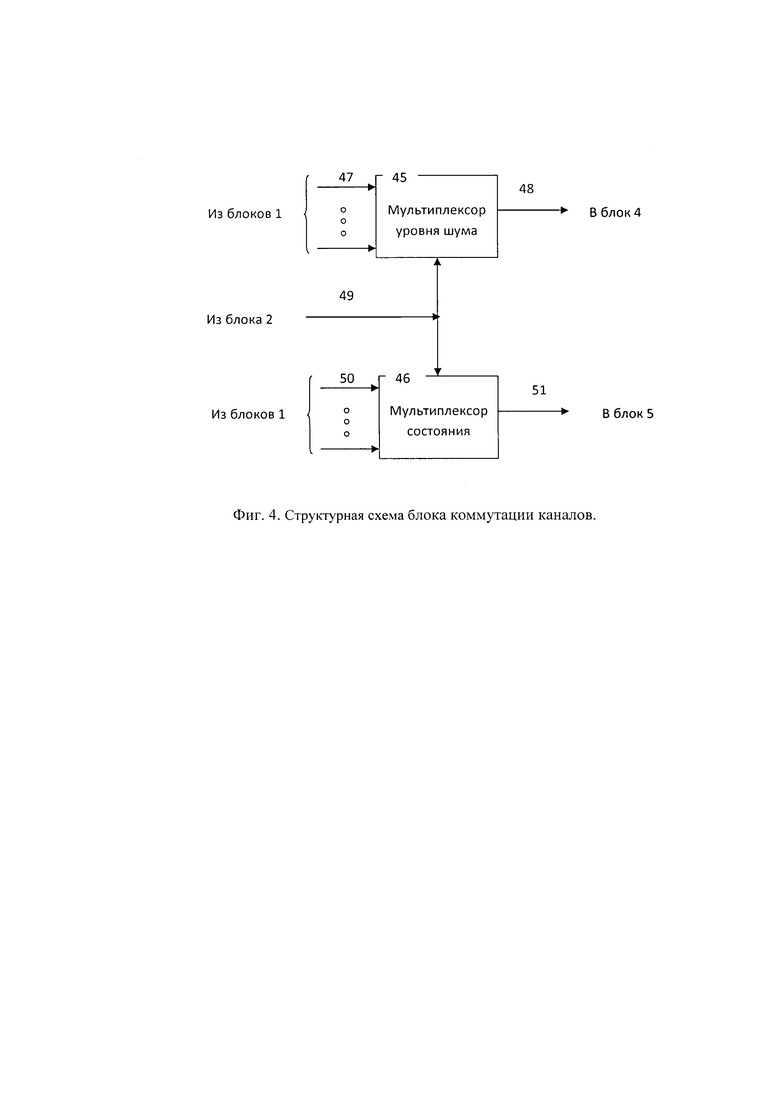
На фиг. 4 представлена структурная схема блока 3 коммутации каналов.
Блок 3 коммутации каналов измерения состоит из мультиплексора 45 уровня шума, мультиплексора 46 состояния. На вход 47 поступают сигналы от датчиков 1 шума, а на вход 49 поступают сигналы управления от блока 3 временной дискретизации. На вход 50 также поступают сигналы от датчиков 1 шума. С выхода 48 сигналы поступают в блок 4, а с выхода 51 сигналы поступают в блок 5 дискретного преобразования Фурье.
На фиг. 5 представлена структурная схема фиксатора 4 уровней шума.
Фиксатор 4 уровней шума состоит из регистра 52 сигналов уровня шума, на входы 53 которого поступают сигналы от блока 3, а на вход 54 поступают сигналы от блока 2. С выходов 55 сигналы поступают в определитель 8 вида уровня шума.
На фиг. 6 представлена структурная схема блока 5 дискретного преобразования Фурье.
Блок 5 дискретного преобразования Фурье состоит из преобразователя 56 Фурье, который может использоваться серийного изготовления с выходами не менее чем для 11-ой гармоники, на его вход 57 поступают исследуемые сигналы от блока 3 коммутации каналов, а на вход 58 поступают сигналы управления от блока 2 временной дискретизации. Сигналы со значениями полученных амплитуд гармоник с выхода 59 поступают в фиксатор 7 состояния, а сигналы 60 со значениями частоты первой гармоники поступают в определитель 10 вида частоты.
На фиг. 7 представлена структурная схема базы 6 уровней шума.
База 6 уровней шума состоит из: блока 61 ввода новых значений уровня шума известного состояния (при режиме корректировки данных); блока 62 ввода новых значений уровня шума известного состояния (при режиме загрузки данных); блока 63 ввода значений уровня шума неизвестного состояния (при режиме диагностики состояний объекта); блока 64 запуска необходимой выборки данных из базы 65 данных, которая в свою очередь состоит из базы 66 данных уровня шума «Низкий» (множество D); базы 67 данных уровня шума «Нормальный» (множество Е); база 68 данных уровня шума «Высокий» (множество F); базы 69 данных уровня шума «Критический» (множество G); блока 70 подготовки вывода данных; входами 71. 72 от интерфейса 15, входом 73 от блока 9, входами 74, 75 от блока 11 и выходами 76, 77, 78, 79 соединенными с блоком 8.
На фиг. 8 представлена структурная схема фиксатора 7 состояния.
Фиксатор 7 состояния состоит из регистра 80 сигналов с количеством разрядов равным количеству выходных разрядов для одной гармоники умноженных на количество исследуемых гармоник, регистра 81 каналов и формирователя 82 сигнала «Начало анализа». Входы 83 подключены к выходам блока 5 дискретного преобразования Фурье, а вход 84 с сигналом записи в регистр 80 поступает от блока 2 временной дискретизации. Вход 85 с сигналом записи в регистр 81, входы 86, содержащие код номера исследуемого канала, и вход 87 с сигналом окончания записей в регистры 80, 81 соединены соответственно с блоком 2 временной дискретизации. Выходы 88 подключены к входам определителя 11 образа состояния. Выходы 89 подключены к входам определителя 11 образа состояния. По сигналу окончания записей в регистры 80, 81 его формирователь 82 сигнала «Начало анализа» формирует сигнал «Начало анализа» состояния, который с выхода 90 поступает также на вход определителя 11 образа состояния.
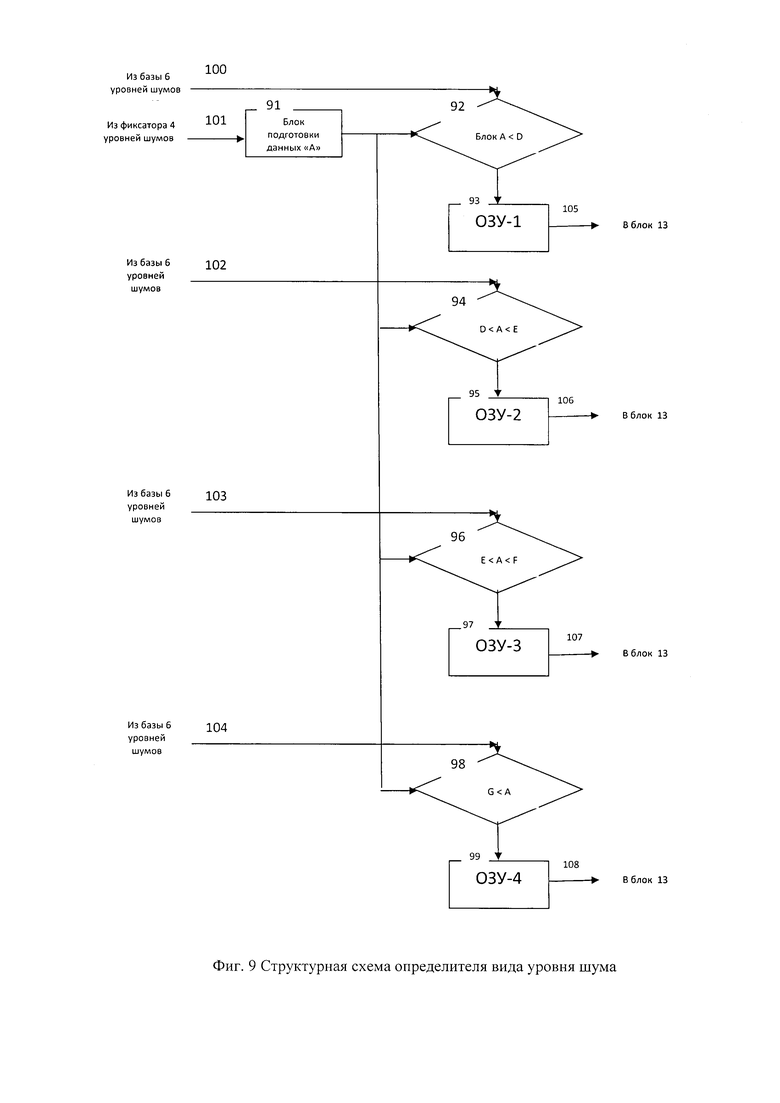
На фиг. 9. представлена структурная схема определителя 8 вида уровня шума.
Определитель 8 вида уровня шума, состоит из блока 91 подготовки данных, который служит для подготовки массива данных множества А к сравнению с массивами данных множеств D, Е, F, G базы 6 уровня шума, блоков 92, 94, 96, 98, сравнения, оперативных запоминающих устройств (ОЗУ): ОЗУ-1 93, ОЗУ -2 95, ОЗУ -3 97, ОЗУ-4 99, входами 100, 101, 102, 103, 104 и выходами 105, 106, 107, 108.
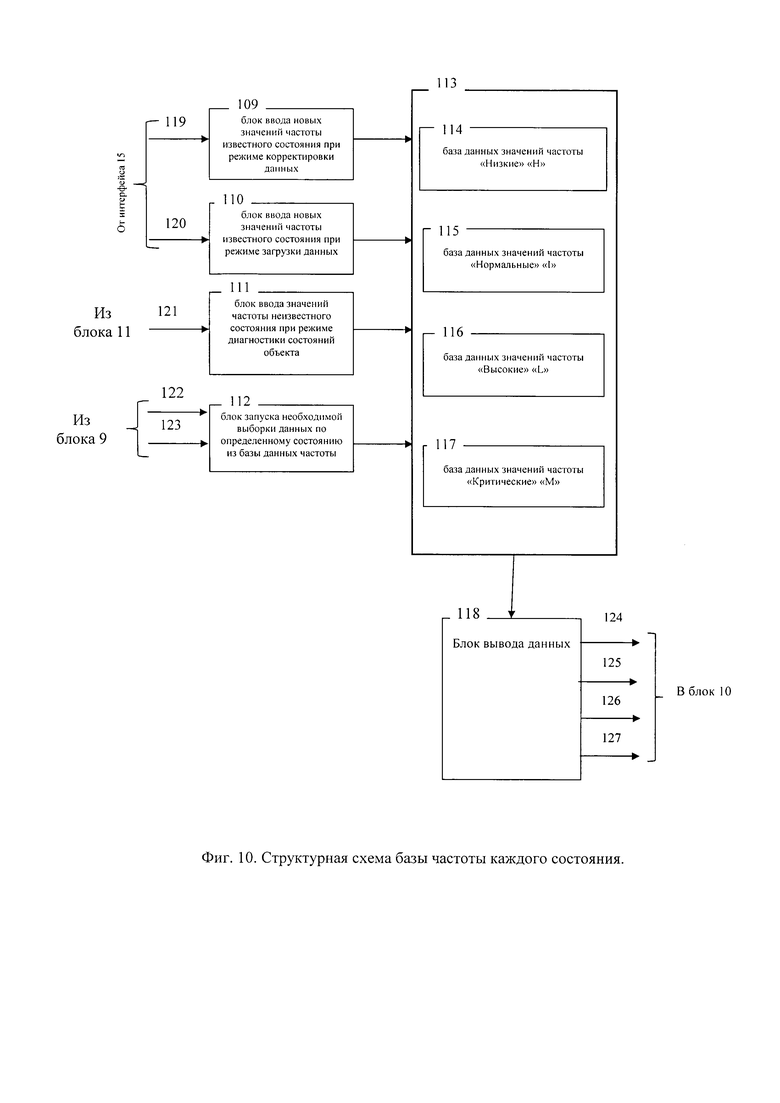
На фиг. 10. представлена структурная схема базы 9 частоты.
База 9 частоты состоит из: блока 109 ввода новых значений частоты известного состояния (при режиме корректировки данных); блока 110 ввода новых значений частоты известного состояния (при режиме загрузки данных); блока 111 ввода значений частоты неизвестного состояния (при режиме диагностики состояний объекта); блока 112 запуска необходимой выборки данных из базы 113 данных, которая в свою очередь состоит из базы 114 данных значений частоты «Низкие» (множество Н); базы 115 данных значений частоты «Нормальные» (множество I); база 116 данных значений частоты «Высокие» (множество L); 6a3s 117 данных значений частоты «Критические» (множество М); блока 118 вывода данных; входами 119. 120 от интерфейса 15, входом 121 от блока 11, входами 122, 123 от блока 9 и выходами 124, 125, 126, 127 соединенными с блоком 10.
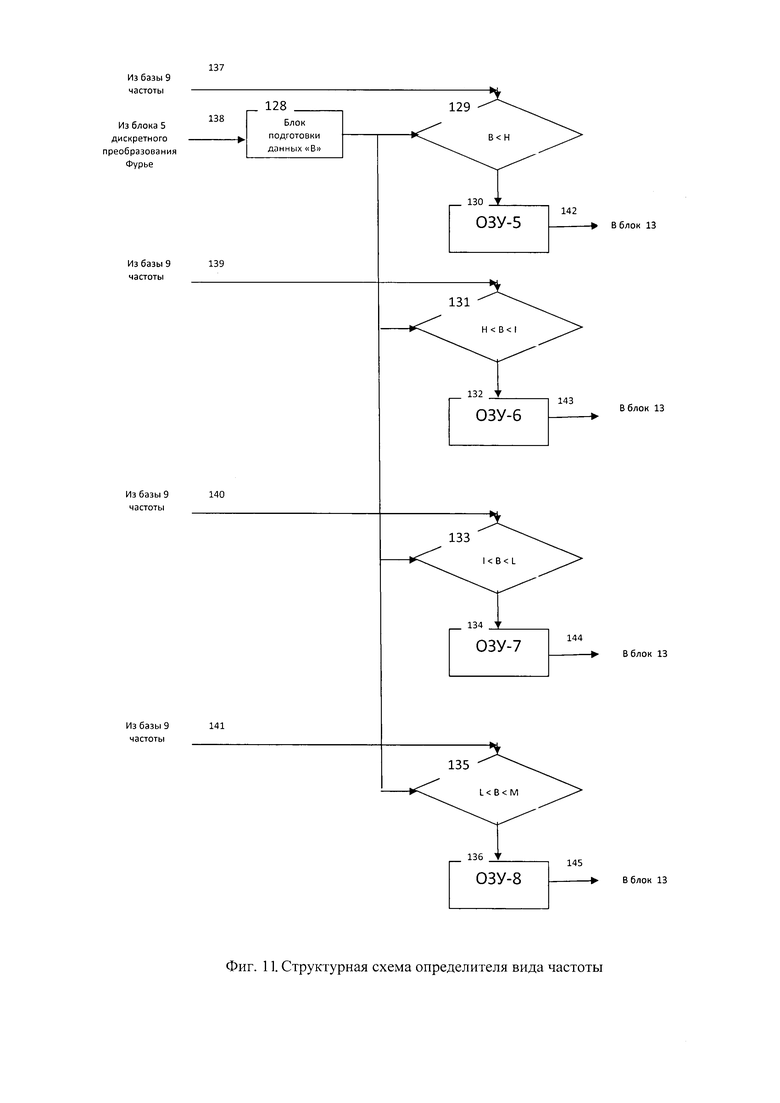
На фиг. 11. представлена структурная схема определителя 10 вида частоты.
Определитель 10 вида частоты, состоит из блока 128 подготовки данных, который служит для подготовки массива данных множества В к сравнению с массивами данных множеств Н, I, L, М базы 9 частоты, блоков 129, 131, 133, 135 сравнения, оперативных запоминающих устройств (ОЗУ): ОЗУ-5 130, ОЗУ -6 132, ОЗУ -7 134, ОЗУ -8 136, входами 137, 138, 139, 140, 141 и выходами 142, 143., 144, 145.
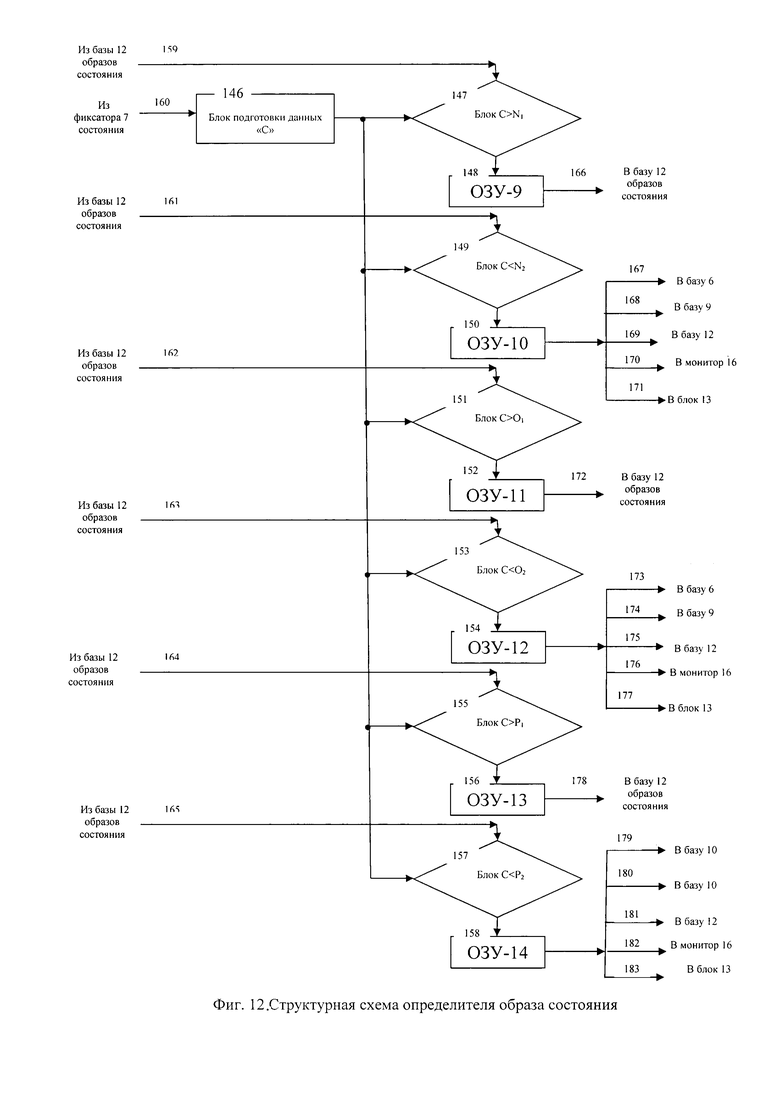
На фиг. 12 представлена структурная схема определителя 11 образа состояния.
Определитель 11 образа состояния состоит из блока 146 подготовки данных, который служит для подготовки массива данных множества С к сравнению с массивами данных множеств N, О, Р базы 12 образов состояния, блоков 147, 149, 151, 153, 155, 157 сравнения, оперативных запоминающих устройств (ОЗУ) ОЗУ -9 148, ОЗУ -10 150, ОЗУ -11 152, ОЗУ -12 154, ОЗУ -13 156, ОЗУ -14 158, входом 159 от базы 12 образов состояния, 160 от фиксатора 7 состояния, входами 161, 162, 163, 164, 165 от базы 12 образов состояния и выходами 166, 169, 172, 175, 178, 181 в базу 12 образов состояния, выходами 167, 173, 179 в базу 6 уровней шума, выходами 168, 174, 180 в базу 9 частоты, 170, 176, 182 в монитор и выходами 171, 177, 183 в блок 13 фиксации динамики состояния.
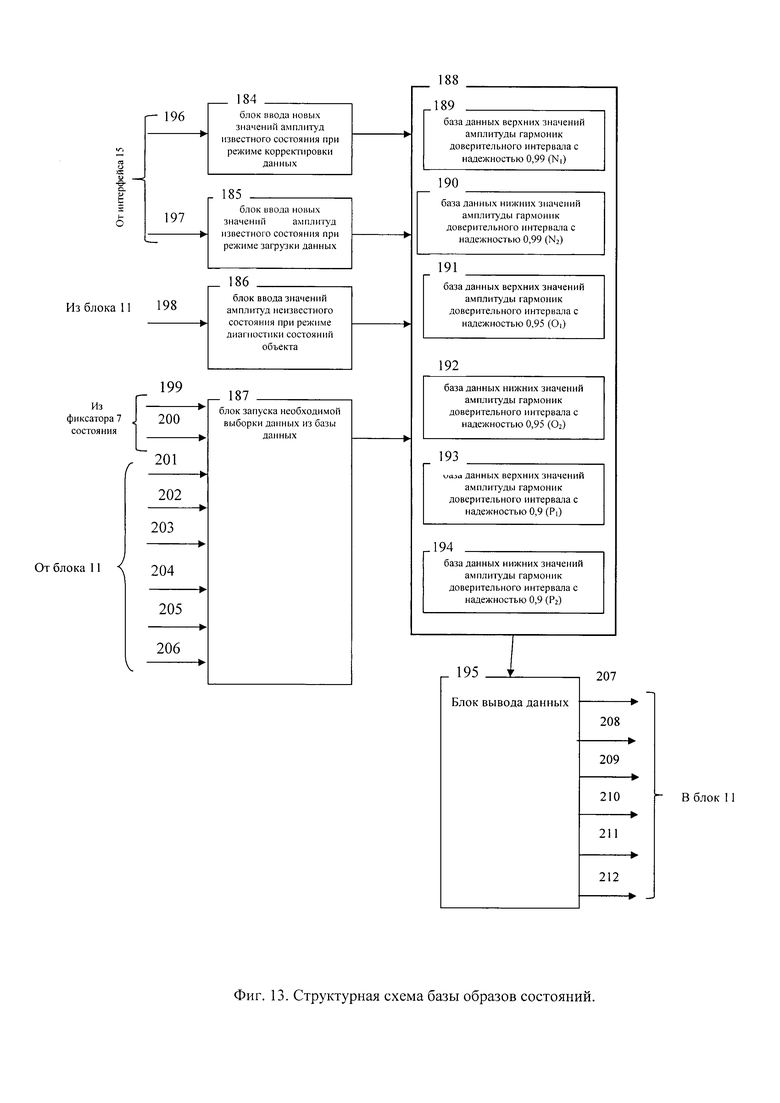
На фиг. 13 представлена структурная схема базы 12 образов состояний.
База 12 образов состояний состоит из: блока 184 ввода новых значений амплитуд известного состояния (при режиме корректировки данных); блока 185 ввода новых значений амплитуд известного состояния (при режиме загрузки данных); блока 186 ввода значений амплитуд неизвестного состояния (при режиме диагностики состояний объекта); блока 187 запуска необходимой выборки данных из базы 188 данных, которая в свою очередь состоит из базы 189 данных верхних значений амплитуд гармоник для доверительного интервала с надежностью 0,99 (множество N1); базы 190 данных нижних значений амплитуд гармоник для доверительного интервала с надежностью 0,99 (множество N2); база 191 данных верхних значений амплитуды гармоник для доверительного интервала с надежностью 0,95 (множество O1); 6aзы 192 данных нижних значений амплитуды гармоник для доверительного интервала с надежностью 0,95 (множество О2); базы 193 данных верхних значений амплитуды гармоник для доверительного интервала с надежностью 0,9 (множество P1); базы 194 данных нижних значений амплитуды гармоник доверительного интервала с надежностью 0,9 (множество Р2); блока 195 вывода данных для анализа; входами 196, 197 от интерфейса 15, входами 198, 201, 202, 203, 204, 205, 206 от блока 11, входами 199, 200 от фиксатора 7 и выходами 207, 208, 209, 210, 211, 212 в блок 11.
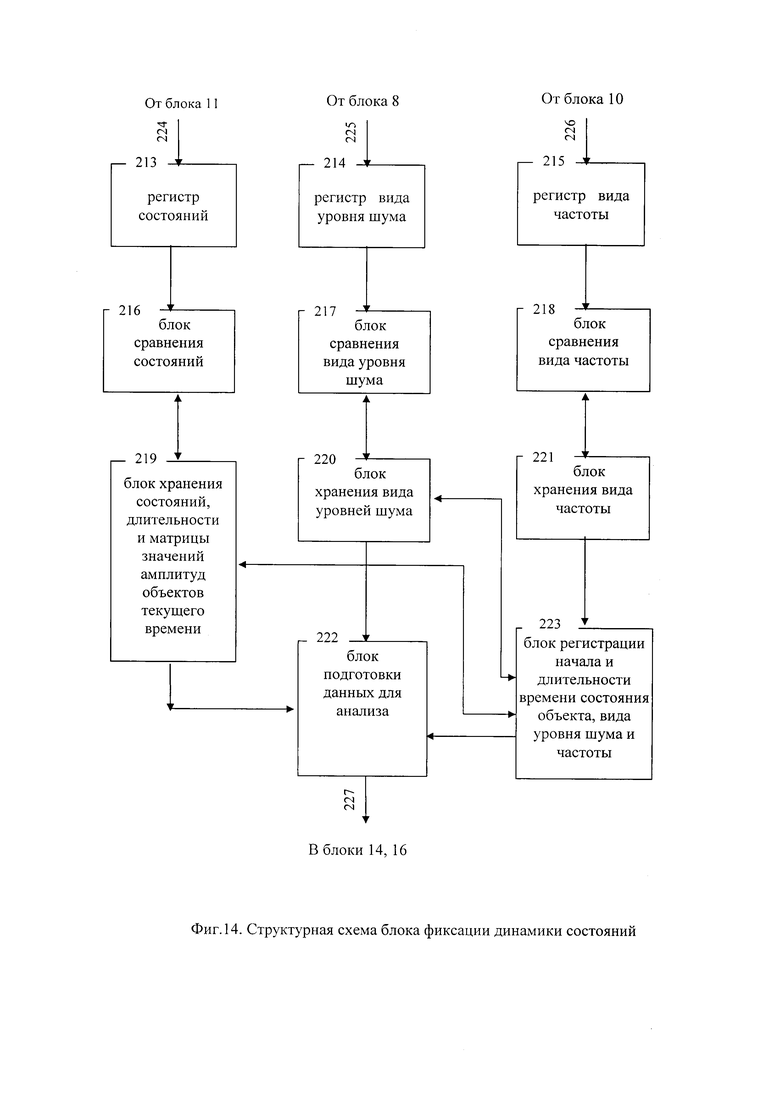
На фиг. 14 представлена структурная схема блока 13 фиксации динамики состояний.
Блок 13 фиксации динамики состояний состоит из: регистра 213 состояний, регистра 214 вида уровней шума, регистра 215 вида частоты, блока 216 сравнения состояний, блока 217 сравнения вида уровня шума, блока 218 сравнения вида частоты, блока 219 хранения состояний, длительности и матрицы значений амплитуд объектов текущего времени, блока 220 хранения вида уровней шума, блока 221 хранения вида частоты, блока 222 подготовки данных для анализа, блока 223 регистрации начала и длительности времени состояния объекта, вида уровня шума и частоты; входами 224, 225, 226 и выходом 227.
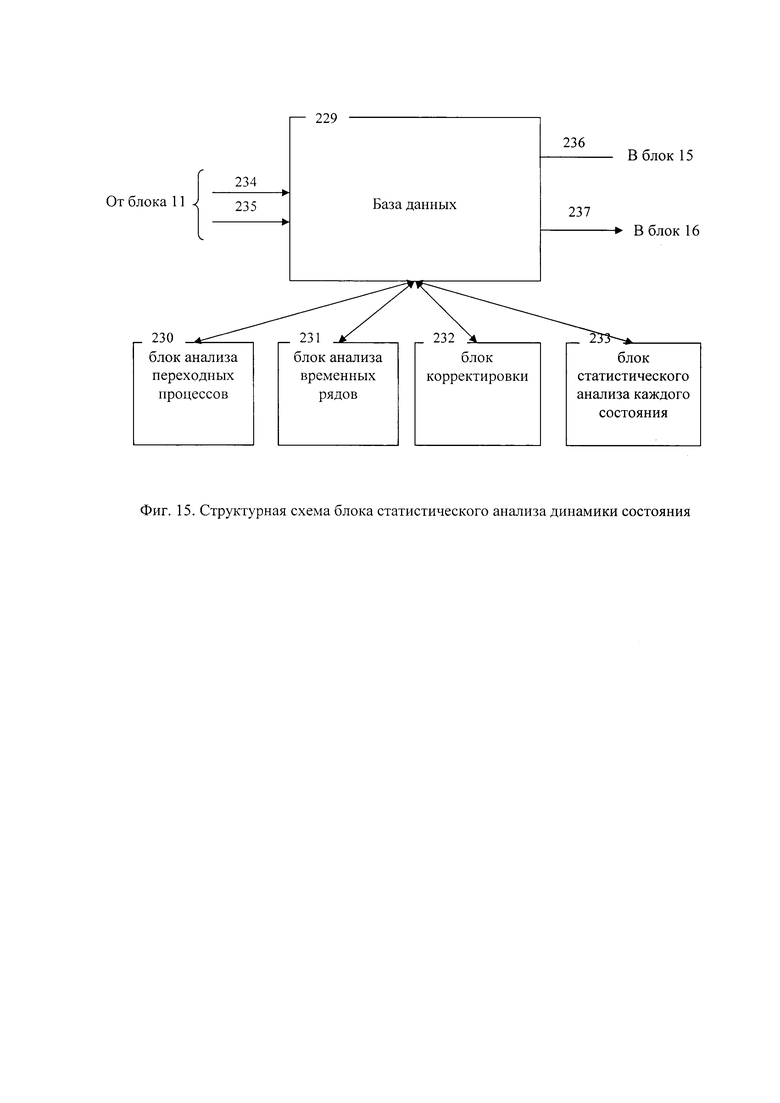
На фиг. 15 представлена структурная схема блока 14 статистического анализа динамики состояния.
Блок 14 статистического анализа динамики состояния состоит из: базы 229 данных динамики состояния, блока 230 анализа переходных процессов (когда состояние длительностью менее определенной продолжительности), блока 231 анализа временных рядов, блока 232 корректировки, блока 233 статического анализа каждого состояния, входами 234, 235 и выходами 236, 237.
Монитор 16 может быть реализован различными серийными блоками.
Интерфейс 15 для связи с компьютером реализуется, в зависимости от необходимых требований стандартов, на соответствующих комплектующих или ПЛИС.
Сущность изобретения как технического решения выражается в совокупности существенных признаков, достаточной для достижения обеспечиваемого изобретением технического результата.
Поставленная задача решается следующим образом.
Устройство для диагностики и контроля технического состояния механизмов транспортных и стационарных систем, содержит, по меньшей мере, один датчик шума (Фиг. 2), размещенный на наружной стороне корпуса двигателя и/или трансмиссии автомобиля, а также на любых других действующих механизмах, и предназначен для снятия звуковых шумов и их преобразования в цифровой сигнал. На вход 22 датчика шума 1 поступает постоянно акустический сигнал шума от исследуемого объекта. Данный сигнал вначале поступает в микрофон 17, далее на фильтр 18 и усилитель-ограничитель 19. Усилитель-ограничитель 19 служит для усиления сигнала до фиксированного значения, и далее сигнал поступает на АЦП-2 21 для дальнейшего исследования состояния объекта. В то же время напряжение с резистора обратной связи усилителя-ограничителя 19 (которое пропорционально коэффициенту усиления усилителя-ограничителя 19) подается на АЦП-1 20 для дальнейшего исследования уровня шума. Каждый датчик шума 1 соединен входами 23, 24 с соответствующими выходами 35, 36 блока 2 (Фиг. 3) временной дискретизации. Сигналами входа 23 осуществляется запуск АЦП-1 20, с выхода 25 которого сигналы поступают на соответствующий вход 47 мультиплексора 45 уровня шума блока 3 коммутации каналов (Фиг. 4). Сигналами входа 24 осуществляется запуск АЦП-2 21, с выхода 26 которого сигналы поступают на соответствующий вход 50 мультиплексора 46 состояния блока 3 коммутации каналов (Фиг. 4).
Блок 2 временной дискретизации служит для синхронизации работы блоков устройства при принятом временном разделении каналов. Частота дискретизации выбирается в делителе частоты 28; фазы и длительности сигналов для управления различных блоков формируются в блоках 29, 30, 31, 32, 33 формирования сигналов. Выходы 35, 36 описаны ранее, выход 37 соединен со входом 49 блока 3 коммутации каналов, выход 38 соединен со входом 54 фиксатора 4 уровня шума, выход 39 соединен со входом 58 блока 5 дискретного преобразования Фурье, выходы 40, 41, 42, 43, 44 соединены соответственно со входами 83, 84, 85, 86, 87 фиксатора 7 состояния.
Блок 3 коммутации каналов (Фиг. 4) управляется (переключается) сигналами, поступающими на вход 49 от блока 2. Данный сигнал подключает на выходы 48, 51 сигналы с выходов 25, 26 запущенных АЦП-1 20, АЦП-2 21 соответствующего датчика 1 шума.
В фиксаторе 4 уровня шума (Фиг. 5) происходит запись сигнала (напряжение с резистора обратной связи) уровня шума в регистр 52 сигналов уровня шума по входу 53, соединенному с выходом 48 блока 3. Управляется запись в регистр 52 сигналами по входу 54, соединенному с выходом 38 блока 2. Сигналы с регистра 52 поступают на выход 55 и далее в определитель 8 вида уровня шума на вход 101.
На вход 57 блока 5 дискретного преобразования Фурье (Фиг. 6) поступают сигналы для преобразования с выхода 51 блока 3 коммутации каналов. На преобразование блок запускается сигналом, поступающим на вход 58 с выхода 39 блока 2 временной дискретизации. Сигналы с выхода 59 поступают на входы 83 фиксатора 7 состояния, а с выхода 60 поступают на входы 138 определителя 10 вида частоты.
База 6 уровней шума (Фиг. 7) служит для хранения эталонной (ранее введенной) информации для сравнения с реально снятыми данными с объектов. База 7 уровней шума состоит из блока 61 ввода новых значений уровня шума известного состояния через вход 71 и используется при режиме корректировки данных от интерфейса 15 для связи с компьютером. Блок 62 ввода новых значений уровня шума известного состояния служит для ввода в режиме загрузки данных с компьютера через вход 72 и интерфейс 15 для связи с компьютером. Блок 63 служит для ввода, через вход 73, значений уровня шума неизвестного состояния от блока 9 в режиме диагностики состояний объекта. Блок 64 запуска необходимой выборки данных из базы данных работает под управлением определителя И образа состояния в режиме диагностики состояний объекта через входы 74, 75. Блок 65 служит для хранения различных значений уровней шума каждого состояния. Количеств видов значений уровня шума может быть различным, в данном материале представлено четыре вида значений уровня шума. В блоке 66 хранятся данные с низким значением уровня шума (Массив «С»). В блоке 67 хранятся данные с нормальным значением уровня шума (Массив «D»). В блоке 68 хранятся данные с высоким значением уровня шума (Массив «Е»). В блоке 69 хранятся данные с критически высокими значениями уровня шума (Массив «F»). Блок 70 вывода данных служит для подготовки и передачи необходимых данных в определитель 8 вида уровня шума через выходы 76, 77, 28, 79, соединенные соответственно со входами 100, 102, 103, 104 определителя 8.
Фиксатор 7 состояния (Фиг. 8) хранит информацию о состоянии объекта (одного канала) и код объекта (канала) в течение времени определения образа состояния. Сигнал о состоянии объекта в виде матрицы значений амплитуд гармоник поступает от блока 5 на вход 83 и записывается в регистр 80 сигналов. Одновременно на вход 86 поступают сигналы с блока 2 временной дискретизации выхода 40 в виде кода (номера) объекта (канала) и записываются в регистр 81 каналов. Сигналы записи в регистры поступают по входам 84, 85 с выходов 41, 42 блока 2. После записи в вышеназванные регистры с блока 2 выхода 43 поступает сигнал на вход 87 и затем в формирователь 82 сигнала «Начало анализа», после чего формируется сигнал на выходе 90 для определителя 11 вход 160 о начале определения образа состояния. Выходы 88 с регистра 80 сигналов соединены со входом 199 базы 12 образов состояния. Выходы 89 с регистра 81 каналов соединены со входом 200 базы 12 образов состояния.
Определитель 8 вида уровня шума (Фиг. 9) определяет вид (один из четырех) уровня шума объекта (канала) путем сравнения сигнала о значении уровня шума объекта (фиксатор 4 уровня шума) с данными, хранившимися в базе 6 уровней шума. Сигнал о значении уровня шума объекта (Массив «А») содержит в цифровом коде значение напряжения пропорциональное уровню шума (коэффициенту усиления усилителя-ограничителя 19). Сигнал о значении уровня шума объекта (Массив «А») поступает с выхода 55 фиксатора 4 уровня шума на вход 101 и далее в блок 91 подготовки данных массива «А». С выхода блока 91 сигналы поступают на входы схем сравнения 92, 94, 96, 98. На вход 100 и далее в схему сравнения 92 поступает значение «низкого» уровня сигнала (Массив «D») с выхода 76 базы 6. В случае выполнения неравенства результат записывается в ОЗУ-1 93 и затем передается через выход 105 в блок 13 фиксации динамики состояния. На вход 102 и далее в схему сравнения 94 поступает значение «нормального» уровня сигнала (Массив «Е») с выхода 77 базы 6. В случае выполнения неравенства результат записывается в ОЗУ-2 95 и затем передается через выход 106 в блок 13 фиксации динамики состояния. На вход 103 и далее в схему сравнения 96 поступает значение «высокого» уровня сигнала (Массив «F») с выхода 78 базы 6. В случае выполнения неравенства результат записывается в ОЗУ-3 97 и затем передается через выход 105 в блок 13 фиксации динамики состояния. На вход 104 и далее в схему сравнения 98 поступает значение «критического» уровня сигнала (Массив «G») с выхода 79 базы 6. В случае выполнения неравенства результат записывается в ОЗУ-4 99 и затем передается через выход 108 в блок 13 фиксации динамики состояния.
База 9 частоты (Фиг. 10) служит для хранения эталонной (ранее введенной) информации для сравнения с реально снятыми данными с объектов. База 9 частоты состоит из блока 109 ввода новых значений частоты известного состояния через вход 119, используется при режиме корректировки данных от интерфейса 15 для связи с компьютером. Блок 110 ввода новых значений частоты известного состояния служит для ввода в режиме загрузки данных с компьютера через вход 120 и интерфейс 15 для связи с компьютером. Блок 111 служит для ввода, через вход 121, значений частоты неизвестного состояния от блока 11 в режиме диагностики состояний объекта. Блок 112 запуска необходимой выборки данных из базы данных работает под управлением определителя 11 образа состояния в режиме диагностики состояний объекта через входы 122, 123. Блок 113 служит для хранения различных значений частоты каждого состояния. Количеств видов значений частоты может быть различным, в данном материале представлено четыре вида значений уровня шума. В блоке 114 хранятся данные с низким значением частоты (Массив «Н»). В блоке 115 хранятся данные с нормальным значением частоты (Массив «I»). В блоке 116 хранятся данные с высоким значением частоты (Массив «L»). В блоке 117 хранятся данные с критически высокими значениями частоты (Массив «М»). Блок 118 вывода данных служит для подготовки и передачи необходимых данных в определитель 10 вида частоты через выходы 124, 125, 126, 127, соединенные соответственно со входами 137, 139, 140, 141 определителя 10 вида частоты.
Определитель 10 вида частоты (Фиг. 11) определяет вид (один из четырех) частоты объекта (канала) путем сравнения сигнала о значении частоты объекта (блок 5 дискретного преобразования Фурье) с данными, хранившимися в базе 9 частоты. Сигнал о значении частоты объекта (Массив «В») содержит в цифровом коде значение частоты первой гармоники. Сигнал о значении частоты объекта (Массив «В») поступает с выхода 60 блока 5 дискретного преобразования Фурье на вход 138 и далее в блок 128 подготовки данных массива «В». С выхода блока 128 сигналы поступают на входы схем сравнения 129, 131, 133, 135. На вход 137 и далее в схему сравнения 129 поступает значение «низкой» частоты (Массив «Н») с выхода 124 базы 9. В случае выполнения неравенства результат записывается в ОЗУ-5 130 и затем передается через выход 142 в блок 13 фиксации динамики состояния. На вход 139 и далее в схему сравнения 131 поступает значение «нормальной» частоты (Массив «I») с выхода 125 базы 9. В случае выполнения неравенства результат записывается в ОЗУ-6 132 и затем передается через выход 143 в блок 13 фиксации динамики состояния. На вход 140 и далее в схему сравнения 133 поступает значение «высокой» частоты сигнала (Массив «L») с выхода 126 базы 9. В случае выполнения неравенства результат записывается в ОЗУ-7 134 и затем передается через выход 144 в блок 13 фиксации динамики состояния. На вход 141 и далее в схему сравнения 135 поступает значение «критической» частоты сигнала (Массив «М») с выхода 127 базы 9. В случае выполнения неравенства результат записывается в ОЗУ-8 136 и затем передается через выход 145 в блок 13 фиксации динамики состояния.
Определитель 11 образа состояния определяет состояние объекта (канала) путем сравнения сигнала о состоянии объекта (фиксатор 7 состояния) с данными, хранившимися в базе 12 образов состояния. Сигнал о состоянии объекта содержит в цифровом коде амплитуды гармоник сигнала после дискретного преобразования Фурье в виде матрицы (массив С). Вначале массив С сигнала о состоянии объекта сверяется с массивом N1 на предмет выделения из базы данных 189 (массив N1) состояния, все амплитуды гармоник которых меньше значений амплитуд гармоник массива С. Все эти состояния записываются в ОЗУ-9 148. Далее в соответствии с записями в ОЗУ-9 148 из базы данных 190 (массив N2) выбираются данные верхних значений амплитуд гармоник, которые поступают на вход 161 схемы сравнения 149, где отбираются состояния, амплитуды гармоник которых (Массив N2) больше амплитуд гармоник массива С. Данные выбранных состояний (Массив N2) сохраняются в ОЗУ-10 150. Это будет состояние, которое с достоверностью 0,99 можно считать истинным состоянием объекта. Код данного состояния соответственно передается: через выход 167 в базу 6 уровней шума, через выход 168 в базу 9 частоты, через выход 169 в базу 12 образов состояния, через выход 170 в монитор 16 и через выход 171 в блок 13 фиксации динамики состояния. Если же состояние с достоверностью 0,99 не будет определено, то массив С сверяется с массивами О1, О2 аналогично ранее сказанному для массивов N1, N2. Если код будет определен, то это будет состояние, которое с достоверностью 0,95 можно считать истинным состоянием объекта. Код данного состояния соответственно передается: через выход 173 в базу 6 уровней шума, через выход 174 в базу 9 частоты, через выход 175 в базу 12 образов состояния, через выход 176 в монитор 16 и через выход 177 в блок 13 фиксации динамики состояния. Если же состояние с достоверностью 0,95 не будет определено, то массив С сверяется с массивами P1, Р2 аналогично ранее сказанному для массивов N1. N2. Если код будет определен, то это будет состояние, которое с достоверностью 0,9 можно считать истинным состоянием объекта. Код данного состояния соответственно передается: через выход 179 в базу 6 уровней шума, через выход 180 в базу 9 частоты, через выход 181 в базу 12 образов состояния, через выход 182 в монитор 16 и через выход 183 в блок 13 фиксации динамики состояния. Если же состояние с достоверностью 0,9 не будет определено, то это означает, что состояние с данным кодом отсутствует в базе 12 образов состояния и оно будет занесено в базу 12 как новое (неизвестное) состояние по входу 198 и блок 186 ввода значений амплитуд неизвестного состояния при режиме диагностики состояний объекта.
База 12 образов состояния служит для хранения эталонной (ранее введенной) информации для сравнения с реально снятыми данными с объектов. Данные хранятся с различной степенью надежности оценки, например 0,9; 0,95; 0,99. База 12 образов состояний состоит из блока 184 ввода новых значений амплитуд известного состояния через вход 196 и используется при режиме корректировки данных от интерфейса 15 для связи с компьютером. Из блока 185 ввода новых значений амплитуд гармоник известного состояния в режиме загрузки данных с компьютера через вход 197 и интерфейс 15 для связи с компьютером. Блок 186 служит для ввода, через вход 198, значений амплитуд неизвестного состояния от блока 11 в режиме диагностики состояний объекта. Блок 187 запуска необходимой выборки данных из базы данных работает под управлением фиксатора 7 состояния через входы 199, 200 и определителя 11 образа состояния в режиме диагностики состояний объекта через входы 201, 202, 203, 204, 205 и 206. Блок 188 служит для хранения верхних и нижних значений амплитуд гармоник с различной степенью надежности. База 189 данных верхних значений амплитуд гармоник доверительного интервала с надежностью 0,99 (массив N1) служит для хранения соответствующих значений амплитуд гармоник. База 190 данных нижних значений амплитуд гармоник доверительного интервала с надежностью 0,99 (массив N2) служит для хранения соответствующих значений амплитуд гармоник. База 191 данных верхних значений амплитуд гармоник доверительного интервала с надежностью 0,95 (массив O1) служит для хранения соответствующих значений амплитуд гармоник. База 192 данных нижних значений амплитуд гармоник доверительного интервала с надежностью 0,95 (массив О2) служит для хранения соответствующих значений амплитуд гармоник. База 193 данных верхних значений амплитуд гармоник доверительного интервала с надежностью 0,9 (массив Р1) служит для хранения соответствующих значений амплитуд гармоник. База 194 данных нижних значений амплитуд гармоник доверительного интервала с надежностью 0,9 (массив Р2) служит для хранения соответствующих значений амплитуд гармоник. Блок 195 вывода данных служит для подготовки и вывода данных в определитель 11 образа состояния в режиме определения состояния объекта.
Блок 13 фиксации динамики состояний служит для хранения данных о текущем состоянии объектов, уровне шума и частоты, их длительности и фиксации момента времени перехода объекта в новое состояние. В регистр 213 состояния с определителя 11 образа состояния через входы 224 заносятся данные о состоянии объекта с соответствующей достоверностью и значения амплитуд гармоник. В регистр 214 вида уровня шума с определителя 8 вида уровня шума через входы 225 заносятся данные о виде уровня шума объекта. В регистр 215 вида частоты с определителя 10 вида частоты через входы 226 заносятся данные о виде частоты объекта. Блок 216 сравнения состояний осуществляет сравнение состояния объекта, полученного с регистра 213, с состоянием объекта по предыдущему опросу, которое хранится в блоке 219 хранения состояний, длительности и матрицы значений амплитуд объектов текущего времени. Если состояния одинаковы, то к времени длительности данного состояния только добавляется время периода опроса в блоке 223, если же состояния различны, то регистрируется время окончания предыдущего состояния и время начала текущего состояния в блоке 223 регистрации начала и длительности времени состояния объекта. После фиксации окончания очередного состояния объекта данные о начале и окончания очередного состоянии объекта, амплитуды гармоник, вид уровня шума и вид частоты поступают в блок 222 подготовки данных для анализа динамики состояния. Эти данные через выход 227 поступают в блок 14 статистического анализа динамики состояний и на монитор 16. Блок 217 сравнения вида уровня шума осуществляет сравнение вида уровня шума объекта, полученного с регистра 214, с видом уровня шума объекта по предыдущему опросу, которое хранится в блоке 220 хранения вида уровня шума. Если виды уровня шума одинаковы, то к времени длительности данного состояния и вида уровня шума только добавляется время периода опроса в блоке 223, если же они различны, то регистрируется время окончания предыдущего состояния и время начала текущего состояния в блоке 223 регистрации начала и длительности времени состояния объекта. Блок 218 сравнения вида частоты осуществляет сравнение вида частоты объекта, полученного с регистра 215, с видом частоты объекта по предыдущему опросу, которое хранится в блоке 221 хранения вида частоты. Если виды частоты одинаковы, то к времени длительности данного состояния, вида уровня шума и вида частоты только добавляется время периода опроса в блоке 223, если же они различны, то регистрируется время окончания предыдущего состояния и время начала текущего состояния в блоке 223 регистрации начала и длительности времени состояния объекта.
Блок 14 статистического анализа динамики состояний служит для обработки данных о состоянии объектов в течение длительного времени и получения соответствующих статистических характеристик амплитуд гармоник (математическое ожидание, дисперсия, среднее квадратическое, доверительные интервалы с надежностью 0,9; 0,95; 0,99 и др.) необходимых для исследования состояний объекта. Блок 14 служит также для выделения переходных процессов и их анализа.
Блок 14 статистического анализа динамики состояния содержит базу 229 данных динамики состояния, куда через вход 234 заносится информация с блока 13 и хранится там до ее передачи в компьютер через выход 236 и интерфейс 15. Блок 230 анализа переходных процессов служит для определения переходных процессов в объекте путем выделения кратковременных состояний между достаточно стабильными состояниями. Блок 231 анализа временных рядов - для выделения различных временных рядов состояния объектов и их анализа. Блок 232 корректировки служит для сравнения апостериорных доверительных интервалов с априорными (база 12 образов состояния). Блок 233 статического анализа каждого состояния для вычисления статистических характеристик (математическое ожидание, дисперсия, среднее квадратическое, доверительные интервалы с надежностью 0,9; 0,95; 0,99 и др.) по каждому состоянию за заданный период.
Более глубокий статистический анализ динамики состояний можно получить на компьютере.
Рассмотрим работу устройства с учетом работы двух датчиков шума, частоты опроса (дискретизации) 2 Гц, АЦП датчика шума 10-тиразрядное, преобразователь Фурье разлагает сигнал на 3 гармоники (1-ю, 3-ю, 5-ю). Рассчитаем минимально допустимый период времени измерения одного объекта. Минимальную частоту измеряемого шума примем равную 100 Гц, отсюда период равен 0,01 сек. Это и будет минимально допустимый период времени измерения одного объекта. Максимальную частоту измеряемого шума примем равную 20 кГц., отсюда период равен 0,00005 сек. Примем, что за данный период необходимо произвести 10 измерений для нормальной работы преобразователя Фурье, следовательно период дискретизации измерений одного канала равен 0,000005 сек или частота измерений равна 200 кГц. Отсюда, для одного канала, измерения должны производиться в течение 0,01 сек. с частотой 200 кГц. С учетом 10-ти разрядных АЦП частота их работы и частота сигнала в канале должна быть не ниже 2 мГц.
Примем допустимое время работы преобразователя Фурье, для одного канала, равным 0,2 сек., что достаточно для выделения трех гармоник.
В нашем примере регистр сигналов 30-ти разрядный, регистр каналов - одноразрядный. Отсюда шина данных 31 разрядная. Шину адресов примем 8-ми разрядную. Примем что на каждом объекте 10 состояний, каждое состояние описывается 6-ью видами (доверительными интервалами), 2 объекта, отсюда необходимое количество адресов 10*6*2=120.
Датчик 1 шума постоянно подключен к контролируемому узлу и сигналы с микрофона 17 через фильтр 18 поступают на вход усилителя-ограничителя 19. Напряжение с резистора обратной связи (пропорциональное коэффициенту усиления усилителя) поступает на вход АЦП-1 20, а нормированное напряжение с выхода усилителя- ограничителя 19 поступает на вход АЦП-2 21. При запуске устройства осуществляется запуск 1-го датчика шума, при этом на АЦП-1 и АЦП-2 поступают тактирующие импульсы с частотой 2 мГц в течение 10 мсек; на это же время мультиплексор 45 подключает 1-й датчик шума (выход 25) к фиксатору 4 уровня шума, где в регистр 52 сигналов уровня шума записывается 10 бит сигналов с АЦП-1 1-го датчика шума, а мультиплексор 46 подключает 1-й датчик шума (выход 26) к блоку 5 дискретного преобразования Фурье, где во входной регистр записывается 20 кбит сигналов с АЦП-2 1-го датчика шума.
По истечении 10 миллисекунд прекращается подача тактирующих импульсов на 1-ый датчик шума и мультиплексор отключает 1-й датчик шума от фиксатора 4 уровня шума и от блока 5 дискретного преобразования Фурье. Через 1 микросекунду запускается в работу блок 3 дискретного преобразования Фурье на 200 миллисекунд. После чего на выходах 55 фиксатора 4 уровня шума будут зафиксированы значения уровня шума, а на выходах 59 блока 5 дискретного преобразования Фурье будут записаны значения амплитуд 3-х первых нечетных гармоник сигнала снятого с 1-го датчика шума, а на выходах 60 блока 5 дискретного преобразования Фурье значение частоты 1-й гармоники.
После завершения работы блока 5 дискретного преобразования Фурье через 1 микросекунду в фиксаторе 7 состояния зафиксируется в регистр 80 сигналов по входу 83 значения амплитуд 3-х первых нечетных гармоник сигнала снятого с 1-го датчика шума, а в регистр 81 каналов по входу 86 значение (код) 1-го канала. После завершения работы блока 5 дискретного преобразования Фурье через 2 микросекунды запускается в работу определитель 8 вида уровня шума, определитель 10 вида частоты и определитель 11 образа состояния.
При включении в работу определителя 8 вида уровня шума запускается генератор адресов базы 65 данных, который подает на шину данных, для сравнения, значения базы 66 данных уровня шума «Низкий» (Массив D) со значением уровня шума от фиксатора 4 уровня шума (Массив А). Если значение уровня шума (Массив D) больше значения (Массив А), то записывается в ОЗУ-1 соответствующий код уровня шума, который через выход 105 предается в блок 13 фиксации состояния. Если же значение уровня шума (Массив D) меньше значения (Массив А), то продолжится сравнение со значениями (Массив Е и так далее, аналогично сравнению со значениями (Массив D) до завершения сравнения со значениями (Массив F).
При включении в работу определителя 10 вида частоты запускается генератор адресов базы 113 данных, который подает на шину данных, для сравнения, значения базы 114 данных значений частоты «Низкие» (Массив Н) со значением частоты от блока 5 дискретного преобразования Фурье (Массив В). Если значение частоты (Массив Н) больше значения (Массив В), то записывается в ОЗУ-5 соответствующий код вида частоты, который через выход 142 предается в блок 13 фиксации динамики состояния. Если же значение частоты (Массив Н) меньше значения (Массив В), то продолжится сравнение со значениями (Массив I), и так далее, аналогично сравнению со значениями (Массив Н). до сравнения со значениями (Массив М).
Определитель 11 образа состояния, как было отмечено ранее, запускается в работу одновременно с определителем 8 вида уровня шума и с определителем 10 вида частоты. В результате выполнения всех необходимых операций, работа которых описана выше, определяется вид состояния. Данный вид состояния передается в блок 13 фиксации динамики состояния для анализа длительности состояния, вида уровня шума и частоты.
В блоке 13 фиксации динамики состояния происходит следующее. После записи в регистр 213, через вход 224 кода состояния, и проверки наличия записей в регистры 214, 215 через входы 225, 226, через 1 мкс в блок 216 поступает сигнал на сравнение записанных в регистр 213 состояния с последним состоянием объекта, хранящемся в блоке 219 хранения состояний. Аналогично в это же время в блок 217 поступает сигнал на сравнение записанных в регистр 214 код вида уровня шума с последним видом уровня шума объекта, хранящемся в блоке 220 хранения вида уровней шума. И в то же время в блок 218 поступает сигнал на сравнение записанного в регистр 215 кода вида частоты с последним кодом вида частоты объекта, хранящемся в блоке 221 хранения вида частоты. Если состояния одинаковы, то в блок 219 хранения состояний записывается лишь матрица со значениями амплитуд гармоник, в противном случае в блок 223 регистрации начала и длительности времени состояния объекта, вида уровня шума и частоты поступает сигнал на регистрацию длительности времени предыдущего состояния объекта и фиксации начала времени нового состояния объекта. Если виды уровня шума одинаковы, то в блок 220 хранения вида уровней шума записывается лишь код вида уровня шума, в противном случае в блок 223 поступает сигнал на регистрацию длительности времени предыдущего вида уровня шума объекта и фиксацию начала времени нового вида уровня шума объекта. Если виды частоты одинаковы, то в блок 221 хранения вида частоты записывается лишь код вида частоты, в противном случае в блок 223 поступает сигнал на регистрацию длительности времени предыдущего вида частоты объекта и фиксации начала времени нового вида частоты объекта. После чего через 1 мкс. передаются, через блок 222 подготовки данных для анализа динамики состояния, уровня шума и частоты данные по предыдущему состоянию объекта в блок 14 статистического анализа динамики состояний.
В блоке 14 статистического анализа динамики состояний происходит анализ переходных процессов (блок 230), анализ временных рядов (блок 231), аналитическая обработка данных для получения числовых статистических характеристик (блок 233), корректировка (если задана) доверительных интервалов по результатам полученных данных (блок 232).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ ТРАНСПОРТНЫХ И СТАЦИОНАРНЫХ СИСТЕМ | 2013 |
|
RU2545250C2 |
| УСТРОЙСТВО ДЛЯ КАРДИОГРАФИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПАЦИЕНТОВ | 2015 |
|
RU2615721C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АРТИЛЛЕРИИ ПРОТИВНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (РЕАЛИЗАЦИИ) | 2015 |
|
RU2624483C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| Устройство для предварительной обработки электроразведочных сигналов | 1986 |
|
SU1539708A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ | 2008 |
|
RU2385489C1 |
| СИСТЕМА КОНТРОЛЯ ПРОЧНОСТНЫХ СВОЙСТВ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2348916C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
Устройство для диагностики и контроля состояния механизмов и других систем относится к бесконтактной диагностике технических систем и может быть использовано для контроля и диагностики дефектов в двигателях и трансмиссиях автомобилей, а также любых других технических системах. Предлагаемое диагностирующее устройство осуществляет измерение шумовых сигналов с объекта в регулируемые дискретные моменты времени с использованием дискретного преобразования Фурье. Полученные векторы амплитуд гармоник сигналов сравниваются с базовыми векторами амплитуд, характеризующими состояние объекта измерения, и на основе сравнения определяются состояния объекта с необходимой надежностью оценки или вводится в базу данных новое состояние. Также в устройстве осуществляется фиксация динамики состояния двигателя и статистическая обработка данных, с помощью которых может производиться прогноз состояния объекта (на основе анализа временных рядов) и корректировка базовых данных. Для повышения качества контроля в устройстве фиксируется (нормируется) сигнал уровня шума, а также измеряются уровень шума и частота первой гармоники шумового сигнала. В результате создано простое в изготовлении и эксплуатации устройство, позволяющее быстро и однозначно определять состояние исследуемой системы и самостоятельно регистрировать и характеризовать новые неизвестные состояния системы. 2 з.п. ф-лы, 15 ил.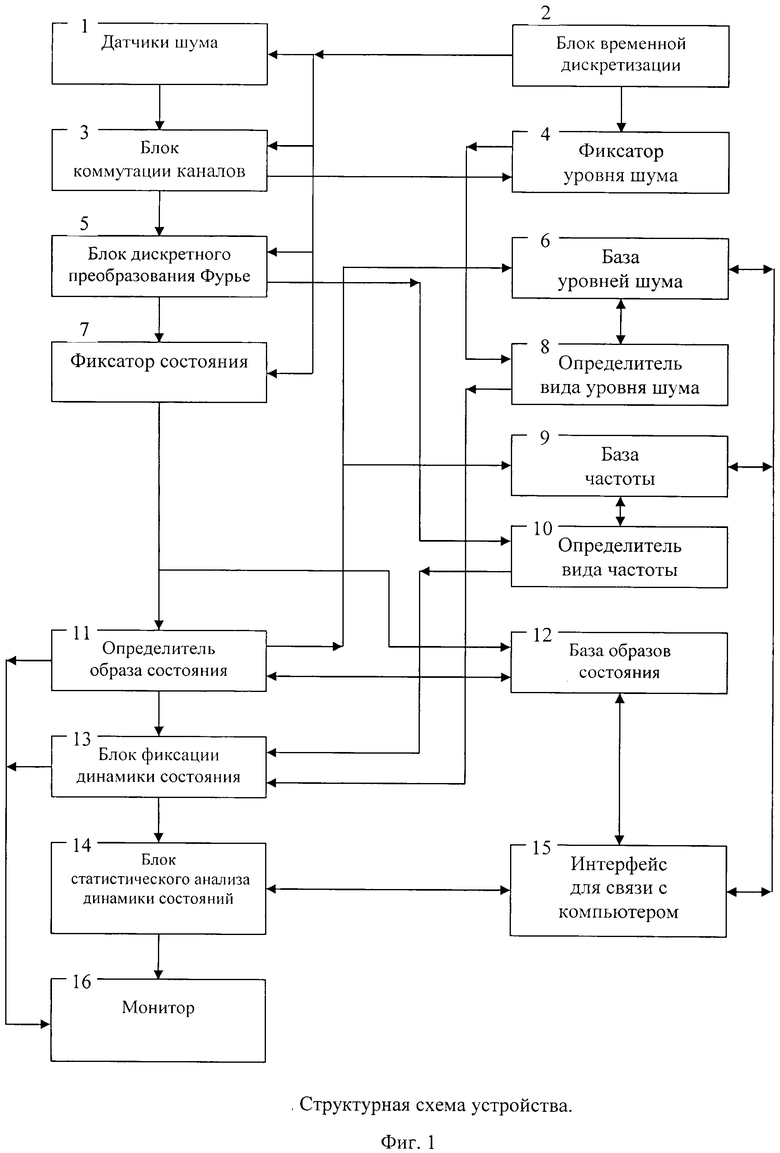
1. Устройство для диагностики и контроля состояния механизмов и систем, содержащее, по меньшей мере, один датчик шума, размещенный на наружной стороне корпуса двигателя и/или трансмиссии автомобиля, а также в любых других действующих механизмах, предназначенный для снятия звуковых шумов и их преобразования в цифровой сигнал, соединенный входом с блоком временной дискретизации, осуществляющим выбор и управление периодом съема сигнала с объекта и выходом с блока коммутации каналов, с помощью которого сигнал от необходимого датчика шума соединяется с блоком дискретного преобразования Фурье, на выходе которого находятся амплитуды гармоник исследуемого сигнала, гармоники обрабатываются в фиксаторе состояния, который запоминает и выдает на выходе амплитуды гармоник исследуемого сигнала необходимое количество времени, амплитуды гармоник поступают в определитель образа состояния, который сравнивает полученный образ состояния объекта (с учетом доверительных интервалов и заданной степенью надежности) с образами из базы образов состояний, выход определителя соединен с входом блока фиксации динамики состояния, где фиксируется время начала и продолжительности нахождения исследуемого объекта в каждом состоянии, а также амплитуды исследуемого состояния, которые записываются в блок статистического анализа динамики состояния, выход которого соединен с монитором, где отображаются данные о текущем и предшествующих состояниях объекта, и интерфейсом для связи с компьютером, отличающееся тем, что для повышения качества диагностирования в датчик шума введен усилитель-ограничитель, с помощью которого сигнал уровня шума доводится до определенной (нормированной) величины, который далее и поступает для исследования в блок дискретного преобразования Фурье.
2. Устройство по п.1, отличающееся тем, что для расширения функций диагностирования в датчик шума введен дополнительно аналого-цифровой преобразователь, на вход которого поступает сигнал с усилителя-ограничителя, пропорциональный уровню шума на входе устройства, с выхода данного аналого-цифрового преобразователя сигнал поступает в блок коммутации каналов и далее в фиксатор уровня шума, где сигнал хранится в течение времени, необходимого для его обработки, затем данный сигнал в определителе вида уровня шума сравнивается с сигналами базы уровней шума, определяется вид уровня шума, который и фиксируется одновременно с образом состояния объекта в блоке фиксации динамики состояния.
3. Устройство по п.1, отличающееся тем, что для расширения функций диагностирования с блока дискретного преобразования Фурье снимается сигнал частоты первой гармоники, который поступает в определитель вида частоты, для сравнения с частотами из базы частоты, где и определяется вид частоты, который фиксируется одновременно с образом состояния объекта в блоке фиксации динамики состояния.
| УСТРОЙСТВО ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2005 |
|
RU2289802C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ ТРАНСПОРТНЫХ И СТАЦИОНАРНЫХ СИСТЕМ | 2013 |
|
RU2545250C2 |
| СПОСОБ ДИАГНОСТИКИ ПО ЭНЕРГИИ ШУМОВ В РАБОЧЕМ ОБЪЕМЕ ЦИЛИНДРА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО, ЦИЛИНДРОПОРШНЕВОГО, КРИВОШИПНОШАТУННОГО И ДРУГИХ МЕХАНИЗМОВ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ(ВАРИАНТЫ) | 2013 |
|
RU2545253C2 |
| CN 202994476 U, 12.06.2013 | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |

