Изобретение относится к гироскопической технике, а более конкретно - к управляемым гиростабилизаторам линии визирования, работающим на подвижных объектах и предназначенным для стабилизации оптического изображения.
Известны устройства стабилизации и наведения линии визирования [пат. РФ №2260773, опубл. 20.09.2005], [Бабаев А.А. Стабилизация оптических приборов. - Л.: "Машиностроение", 1975, с.40-41], осуществляющие стабилизацию линии визирования с помощью зеркала в кардановом подвесе.
Недостатком таких устройств является ограниченный угол обзора вертикального наведения, не превышающий 45 градусов, поскольку большие углы требуют существенного увеличения длины зеркала, кроме того, при угле поворота по оси вертикального наведения, близком к 90 градусам, момент, требуемый от двигателя на наружной рамке карданова подвеса, стремится к бесконечности, и устройство теряет управляемость.
Наиболее близким к заявляемому является устройство стабилизации линии визирования [пат. РФ №2104578, опубл. 10.02.1998], содержащее наружную рамку, установленную в подшипниках на основании, и внутреннюю рамку, установленную в подшипниках на наружной рамке так, что ось вращения внутренней рамки перпендикулярна оси вращения наружной рамки, первое зеркало, жестко закрепленное на наружной рамке под углом 45° к осям вращения наружной и внутренней рамок, так что ось вращения наружной рамки проходит через его центр, второе зеркало, жестко закрепленное на внутренней рамке под углом 45° к оси вращения внутренней рамки, так что ось вращения внутренней рамки проходит через его центр, первый и второй двигатели, установленные на осях вращения наружной и внутренней рамок соответственно, датчик угла, размещенный на оси вращения внутренней рамки, три датчика угловой скорости (ДУС), два из которых закреплены на внутренней рамке так, что ось чувствительности первого ДУС совпадает с осью вращения внутренней рамки, ось чувствительности второго ДУС перпендикулярна линии визирования и оси чувствительности первого ДУС, третий ДУС размещен на наружной рамке так, что его ось чувствительности совпадает с осью вращения наружной рамки, первое и второе усилительно-корректирующие устройства, причем выход первого корректирующего устройства подключен к входу первого двигателя, выход второго усилительно-корректирующего устройства - к входу второго двигателя, выход первого ДУС подключен к входу второго усилительно-корректирующего устройства, выходы второго и третьего ДУС подключены к входу первого усилительно-корректирующего устройства через коммутатор, управляющий вход которого подключен к выходу датчика угла.
При малых углах поворота внутренней рамки первый двигатель стабилизации управляется сигналом второго ДУС, а второй двигатель стабилизации управляется сигналом первого ДУС. При больших углах поворота управление первым двигателем стабилизации осуществляется сигналом третьего ДУС.
Недостатком данной схемы является невозможность стабилизации линии визирования при больших углах вертикального наведения, близких к 90°, несмотря на сохранение управляемости. Дополнительным недостатком является погрешность стабилизации изображения, возникающая вследствие того, что линия оптического луча, направленного на цель, не пересекается с линией оптического луча, направленного на приемник изображения (осью вращения наружной рамки), что приводит к параллаксу и дополнительной погрешности стабилизации оптического луча.
Задачей изобретения является обеспечение обзора и стабилизации линии визирования при любых углах горизонтального и вертикального наведения.
Поставленная техническая задача в предлагаемом изобретении решается тем, что в известном устройстве стабилизации линии визирования, содержащем наружную рамку, установленную в подшипниках на основании, и внутреннюю рамку, установленную в подшипниках на наружной рамке так, что ось вращения внутренней рамки перпендикулярна оси вращения наружной рамки, первое зеркало, жестко закрепленное на наружной рамке под углом 45° к осям вращения наружной и внутренней рамок, так что ось вращения наружной рамки проходит через его центр, второе зеркало, первый и второй двигатели, установленные на осях вращения наружной и внутренней рамок соответственно, датчик угла, размещенный на оси вращения внутренней рамки, три датчика угловой скорости (ДУС), первое и второе усилительно-корректирующие устройства, причем выход первого усилительно-корректирующего устройства подключен к входу первого двигателя, выход второго усилительно-корректирующего устройства - к входу второго двигателя, в подшипниках на внутренней рамке дополнительно установлено третье зеркало так, что ось его вращения перпендикулярна оси вращения наружной рамки, и в исходном положении совпадает с осью вращения наружной рамки, на оси вращения третьего зеркала дополнительно установлены третий двигатель и второй датчик угла, на наружной рамке дополнительно установлено четвертое зеркало, параллельное первому зеркалу с направленной на него отражающей плоскостью, при этом второе зеркало установлено на наружной рамке так, что совместно с четвертым зеркалом образует уголковый отражатель, а три датчика угловой скорости установлены с обратной стороны третьего зеркала так, что их оси чувствительности в исходном положении параллельны осям вращения третьего зеркала (первый ДУС), внутренней рамки (второй ДУС) и линии визирования (третий ДУС) соответственно, дополнительно введен вычислитель ошибки канала азимута, первый вход которого соединен с выходом первого ДУС, а второй вход соединен с выходом второго датчика угла, введен вычислитель ошибки канала высоты, первый вход которого соединен с выходом второго ДУС, второй вход - с выходом третьего ДУС, а третий вход - с выходом второго датчика угла, введено третье усилительно-корректирующее устройство, выход которого соединен с входом третьего двигателя, первый вход соединен с выходом вычислителя ошибки канала азимута, второй и третий входы соединены с выходами первого и второго датчиков угла, входы первого усилительно-корректирующего устройства соединены с выходом вычислителя ошибки канала азимута и с выходом второго датчика угла, входы второго усилительно-корректирующего устройства соединены с выходом вычислителя ошибки канала высоты, с выходом вычислителя ошибки канала азимута и с выходами первого и второго датчиков угла.
На чертеже изображена принципиальная схема устройства стабилизации и наведения линии визирования.
Устройство содержит наружную рамку 1, установленную в подшипниках на основании 2, и внутреннюю рамку 3, установленную в подшипниках на наружной рамке 1. На наружной рамке 1 жестко закреплены зеркала 4, 5 и 6. На внутренней рамке 3 в.подшипниках установлено зеркало 7 так, что ось вращения зеркала 7 перпендикулярна оси вращения внутренней рамки 3, и в исходном состоянии совпадает с осью вращения наружной рамки 1. На осях вращения наружной рамки 1, внутренней рамки 3 и зеркала 7 установлены двигатели 8, 9 и 10 соответственно. На осях вращения внутренней рамки 3 и зеркала 7 установлены датчики угла 11 и 12. С обратной стороны зеркала 7 установлены ДУС 13, 14 и 15, причем ось чувствительности ДУС 13 параллельна оси вращения зеркала, ось чувствительности ДУС 14 в исходном состоянии параллельна оси вращения внутренней рамки, ось чувствительности ДУС 15 в исходном состоянии параллельна линии визирования. Входы двигателей 8, 9 и 10 соединены с выходами усилительно-корректирующих устройств 16, 17 и 18 соответственно. Входы усилительно-корректирующего устройства 16 соединены с выходом вычислителя ошибки канала азимута 19 и с выходом датчика угла 12. Входы усилительно-корректирующего устройства 17 соединены с выходом вычислителя ошибки канала азимута 19, выходом вычислителя ошибки канала высоты 20 и с выходами датчиков угла 11 и 12. Входы усилительно-корректирующего устройства 18 соединены с выходом вычислителя ошибки канала азимута 19 и с выходами датчиков угла 11 и 12. Входы вычислителя ошибки канала азимута 19 соединены с выходом ДУС 13 и выходом датчика угла 12. Входы вычислителя ошибки канала высоты 20 соединены с выходами ДУС 14 и 15 и с выходом датчика угла 12.
Устройство, с учетом вышеизложенного описания, работает следующим образом. В режиме стабилизации положение линии визирования должно оставаться неизменным, т.е. проекции угловых скоростей оптического луча ωy3опт и ωz3опт на оси, перпендикулярные направлению оптического луча на цель, должны быть равны нулю. Для этого отклонение зеркала 7 от требуемого положения под действием качки основания 2 регистрируется ДУС 13, 14 и 15.
Сигнал с ДУС 13 поступает на первый вход вычислителя ошибки канала азимута 19, сигнал с датчика угла 12 поступает на второй вход вычислителя ошибки канала азимута 19. В вычислителе ошибки канала азимута 19 формируется сигнал ошибки по оси горизонтального наведения в соответствии с зависимостью:
 ,
,
где φx - угол поворота зеркала относительно-внутренней рамки, измеряемый датчиком угла 12, ωy3 - угловая скорость, измеряемая ДУС 13.
Сигналы с выходов ДУС 14 и ДУС 15 поступают на первый и второй входы вычислителя ошибки канала высоты 20 соответственно. Сигнал с датчика угла 12 поступает на третий вход вычислителя ошибки канала высоты 20. В вычислителе ошибки канала высоты 20 формируется сигнал ошибки по оси вертикального наведения в соответствии с зависимостью:
 ,
,
где ωx3 - угловая скорость, измеряемая ДУС 15, ωz3 - угловая скорость, измеряемая ДУС 14.
С выхода вычислителя ошибки канала азимута 19 сигнал, пропорциональный ошибке α, поступает на вход усилительно-корректирующего устройства 18 вместе с сигналами с датчиков угла 11 и 12. В усилительно-корректирующем устройстве 18 в соответствии с зависимостью fx=Kyα[1-cosφz]+knφxcosφz формируется сигнал управления двигателем 10. Сигнал с выхода вычислителя ошибки канала азимута также поступает на вход усилительно-корректирующего устройства 16 вместе с сигналом с датчика угла 12. В усилительно-корректирующем устройстве 16 в соответствии с зависимостью fy=Kyα-knφx формируется сигнал управления двигателем 8.
При малых углах вертикального наведения φz сигнал по углу ошибки α не будет участвовать в управлении дополнительным двигателем 10, и управление по каналу азимута будет осуществляться в основном двигателе 8, как в обычном двухосном гироскопическом стабилизаторе. Зеркало 7 будет фиксироваться в начальном положении двигателем 10 за счет обратной связи по углу φx с коэффициентом  . При увеличении угла вертикального наведения φz, когда глубина обратной связи по ошибке α через двигатель 8 за счет кинематики карданова подвеса уменьшается, глубина обратной связи через двигатель 10 возрастает, при этом сохраняется общая управляемость по каналу азимута.
. При увеличении угла вертикального наведения φz, когда глубина обратной связи по ошибке α через двигатель 8 за счет кинематики карданова подвеса уменьшается, глубина обратной связи через двигатель 10 возрастает, при этом сохраняется общая управляемость по каналу азимута.
В усилительно-корректирующем устройстве 17 в соответствии с зависимостью fz=Kββ/cosφx-(Kyα+knφx)tgφxsinφz вычисляется сигнал управления двигателем 9.
Введение дополнительной степени свободы зеркала обеспечивает возможность стабилизации оптического луча при любых углах горизонтального и вертикального наведения.
Введение уголкового отражателя устраняет параллакс оптического луча и обеспечивает повышение точности стабилизации положения оптического луча.
Предлагаемая схема перспективна при использовании малогабаритных микромеханических датчиков угловой скорости.
Изобретение относится к управляемым гиростабилизаторам линии визирования, работающим на подвижных объектах и предназначенным для стабилизации оптического изображения. На наружной рамке устройства стабилизации линии визирования установлена внутренняя рамка с осью вращения, перпендикулярной оси вращения наружной рамки. На внутренней рамке установлено подвижное зеркало с осью вращения, совпадающей в исходном состоянии с осью вращения наружной рамки. На наружной рамке установлена система из трех зеркал. На осях вращения наружной рамки, внутренней рамки и подвижного зеркала установлены первый, второй и третий двигатели. На осях вращения внутренней рамки и подвижного зеркала установлены первый и второй датчики угла. С обратной стороны подвижного зеркала установлены три датчика угловой скорости (ДУС). Входы двигателей соединены с выходами усилительно-корректирующих устройств (УКУ). Изобретение обеспечивает стабилизацию линии визирования при углах вертикального наведения в диапазоне от 0 до 180 градусов. 1 ил.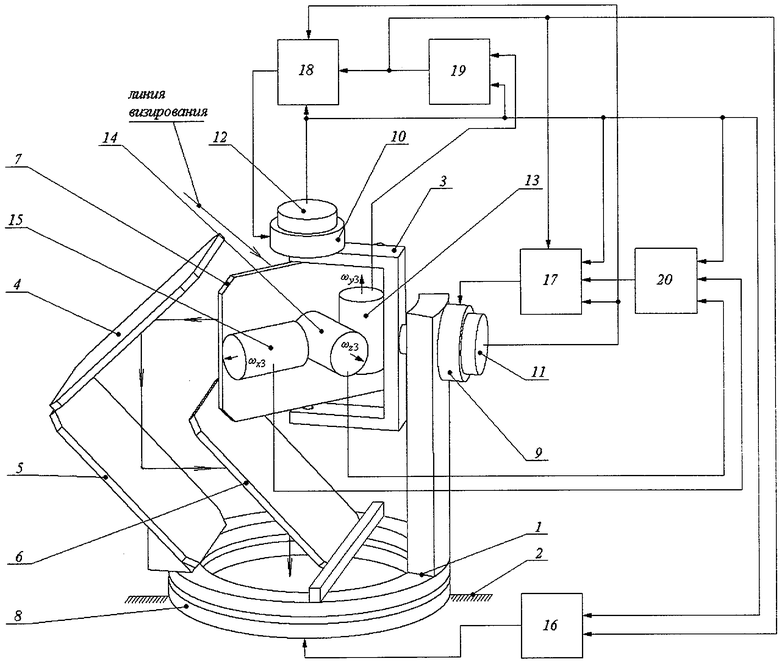
Устройство стабилизации линии визирования, содержащее наружную рамку, установленную в подшипниках на основании, и внутреннюю рамку, установленную в подшипниках на наружной рамке так, что ось вращения внутренней рамки перпендикулярна оси вращения наружной рамки, первое зеркало, жестко закрепленное на наружной рамке под углом 45° к осям вращения наружной и внутренней рамок, так что ось вращения наружной рамки проходит через его центр, второе зеркало, первый и второй двигатели, установленные на осях вращения наружной и внутренней рамок соответственно, датчик угла, размещенный на оси вращения внутренней рамки, три датчика угловой скорости (ДУС), первое и второе усилительно-корректирующие устройства, отличающееся тем, что в подшипниках на внутренней рамке дополнительно установлено третье зеркало так, что ось его вращения перпендикулярна оси вращения внутренней рамки и в исходном положении совпадает с осью вращения наружной рамки, на оси вращения третьего зеркала дополнительно установлены третий двигатель и второй датчик угла, на наружной рамке дополнительно установлено четвертое зеркало, параллельное первому зеркалу с направленной на него отражающей плоскостью, при этом второе зеркало установлено на наружной рамке так, что совместно с четвертым зеркалом образует уголковый отражатель, а три датчика угловой скорости установлены с обратной стороны третьего зеркала так, что их оси чувствительности в исходном положении параллельны осям вращения третьего зеркала (первый ДУС), внутренней рамки (второй ДУС) и линии визирования (третий ДУС) соответственно, дополнительно введен вычислитель ошибки канала азимута, первый вход которого соединен с выходом первого ДУС, а второй вход соединен с выходом второго датчика угла, введен вычислитель ошибки канала высоты, первый вход которого соединен с выходом второго ДУС, второй вход - с выходом третьего ДУС, а третий вход - с выходом второго датчика угла, введено третье усилительно-корректирующее устройство, выход которого соединен с входом третьего двигателя, первый вход соединен с выходом вычислителя ошибки канала азимута, второй и третий входы соединены с выходами первого и второго датчиков угла, входы первого усилительно-корректирующего устройства соединены с выходом вычислителя ошибки канала азимута и с выходом второго датчика угла, входы второго усилительно-корректирующего устройства соединены с выходом вычислителя ошибки канала высоты, с выходом вычислителя ошибки канала азимута и с выходами первого и второго датчиков угла.
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1994 |
|
RU2091843C1 |
| US 5867317 А, 02.02.1999 | |||
| СПОСОБ ПОДГОТОВКИ ШИХТЫ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЕВЫХ СПЛАВОВ | 2007 |
|
RU2345155C1 |

