Настоящее техническое решение относится к области радиотехники и более конкретно, к командно-измерительным системам (КИС) космических аппаратов (КА), и направлено на повышение помехоустойчивости передачи командных и дальномерных сигналов в процессе управления КА, расположенным на геостационарной орбите.
КИС КА предназначена для управления космическим аппаратом и его функциональными подсистемами на всех этапах эксплуатации. Управление режимами работы и функциями КА осуществляется путем передачи из Наземного Комплекса Управления (НКУ) по радиоканалу телекоманд (ТК) и командно-программной информации (КПИ), которая может содержать группу указаний относительно времени и очередности исполнения ТК. По ответному радиоканалу передаются телеметрические данные (ТМ) о состоянии узлов и подсистем КА и выполняемых ими функциях. Кроме того, КИС обеспечивает измерение текущих навигационных параметров (ИТНП) КА, в первую очередь, дальности КА относительно НКУ. Вычисление дальности КА производится в НКУ на основе измерений времени прохождения специального дальномерного сигнала по трассе НКУ-КА-НКУ. Поэтому по восходящему и нисходящему радиоканалам необходимо передавать сигналы от двух не связанных между собой источников информации.
Задача передачи сигналов от нескольких источников традиционно решается с помощью одного из видов уплотнения сигналов, в частности, частотного, когда каждый из сигналов передается на выделенной поднесущей частоте с передачей суммарного сигнала на самостоятельной несущей частоте, как это предлагается, например, в [1]. Недостатком известного решения является невысокая помехоустойчивость, причина чего заключена в широкой полосе частот занимаемых командными и дальномерными сигналами. Это является одной из важных причин низкой помехоустойчивости.
Также известна система, описанная в патенте US 006864838 В2, МПК H01Q 3/22, H01Q 3/24, H01Q 3/26 приоритет от 8 марта 2005 «Ranging system and method for satellites (Система и способ измерения дальности спутников)». Система в составе КА и НКУ, содержащего время-измерительный узел, опорный генератор и последовательно соединенные мультиплексор/кодер цифровых сигналов SI, S2 и т.д., модулятор QPSK, повышающий преобразователь частоты, антенный пост, понижающий преобразователь частоты, первый приемник, первый демодулятор, первый декодер, первый процессорный блок, выходом подключенный к первому входу время-измерительного блока, а также последовательно соединенные второй приемник, по входу соединенный с выходом модулятора QPSK, второй демодулятор, второй декодер и второй процессорный блок, выходом подключенного ко второму входу время-измерительного блока, причем выход опорного генератора подключен к третьему входу время-измерительного узла. Под сигналом S1 можно понимать командную, а под сигналом S2 - дальномерную последовательности. Ширина спектра излучаемого сигнала определяется суммарной шириной спектра сигналов SI, S2 и т.д. и не уменьшается даже, если один или несколько сигналов S1, S2 и т.д. равны нулю. Недостаток системы состоит в необходимости широкой полосы частот приемо-передающих трактов, что снижает помехоустойчивость и приводит к увеличению мощности наземного и бортового передатчиков.
Наиболее близким к предлагаемому техническому решению является структурная схема КИС КА, рекомендованная стандартом CCSDS (Consultative Committee for Space Data Systems. - Международный Консультативный Комитет по космическим системам передачи данных, Псевдошумовые (PN) системы измерения дальности. [2]). На рис. 20, стр. 2-69 приведена структурная схема передатчика наземной станции, на рис. 21, стр. 2-70 - структурная схема бортового приемника КА [2].
Известная КИС содержит последовательно соединенные источник команд, преобразователь битовой последовательности источника команд в радиоимпульсы частотой заполнения fs, первый модулятор первой поднесущей частоты, сумматор, аналоговый фазовый модулятор, усилитель мощности НКУ, приемо-передающую антенну НКУ, приемо-передающую антенну КА, а также блок измерения дальности КА, блок формирования дальномерных сигналов, тактовый генератор, блок синхронизации, блок формирования телеметрического пакета, фильтр, формирующий меандр/синус, второй модулятор второй поднесущей частоты, выход которого подключен ко второму входу сумматора, приемник КА, отличающаяся тем, что в нее дополнительно введены управляющий компьютер, коммутатор НКУ, первым входом соединенный с третьим выходом управляющего компьютера, вторым входом соединенный со вторым выходом управляющего компьютера.
Сигналы, поступающие на приемо-передающую антенну НКУ дважды модулированы и должны подвергаться усилению мощности перед излучением в свободное пространство в направлении на КА.
Применение двухуровневой модуляции на линиях НКУ-КА и КА-НКУ обусловлено требованием стандарта CCSDS по обеспечению передачи ТК, дальномерных и телеметрических данных. При этом условие непрерывности передачи ТК (КПИ) и измерения дальности не является обязательным [2]. Ширина спектра сигнала на входе аналогового фазового модулятора вычисляется по формуле:

где: ΔfИТНП - ширина спектра сигнала ИТНП; ΔfТК - ширина спектра сигнала ТК (КПИ).
Ширина спектра сигнала на выходе фазового модулятора:

Где: Dф - девиация фазы в радианах ([3] страница 105, формула 4.33).
Как видно, фазовая модуляция расширяет спектр сигнала в 2(Dp+1) раз. Например, если девиация фазы равна 1 радиан, то происходит расширение спектра сигнала в 4 раза.
В известной командно-измерительной системе узлы усиления мощности НКУ и КА, а также приемо-передающие антенны НКУ и КА опущены, будем считать это упущением и включим усилитель мощности под именем «усилитель мощности НКУ», «приемо-передающую антенну НКУ», усилитель мощности КА под именем «усилитель мощности КА» и приемо-передающую антенну КА под именем «приемо-передающая антенна КА» в ограничительную часть формулы изобретения. Кроме того, в техническом решении использованы сигналы частот fнн - несущей частоты нисходящего сигнала от КА к НКУ, fнв - несущая частота восходящего сигнала от НКУ к КА и fоп - частота импульсов опорного генератора, который используется при цифровом измерении длительности интервала времени между импульсами «старт» и «стоп». Сигналы этих частот, как и многие другие вспомогательные, формируются в синтезаторе частот, который здесь не показан, но подразумевается.
Недостаток известной системы - прототипа - состоит в низкой помехоустойчивости за счет использования, практически, двойной ширины полосы пропускания радиотехнических трактов.
Техническим результатом предлагаемого решения является повышение помехоустойчивости передачи командных и дальномерных сигналов за счет уменьшения необходимой ширины полосы частот.
Это обеспечивается за счет разновременной передачи командных и дальномерных сигналов командно-измерительной системы космических аппаратов, содержащей последовательно соединенные модулятор НКУ, усилитель мощности НКУ, приемо-передающую антенну НКУ, а также модулятор КА, усилитель мощности КА, приемопередающую антенну КА, приемник КА, а также блок формирования дальномерного сигнала, последовательно соединенные блок формирования телеметрического пакета, модулятор КА, а также блок измерения дальности, тактовый генератор, блок синхронизации, приемник НКУ по входу соединенный с приемо-передающей антенной НКУ, а по выходу - с блоком синхронизации, выход которого соединен со входом «стоп» блока измерения дальности, отличающаяся тем, что в нее дополнительно введены управляющий компьютер, коммутатор НКУ, первый вход которого соединен с третьим выходом управляющего компьютера, второй вход коммутатора НКУ соединен со вторым выходом управляющего компьютера, а первый выход управляющего компьютера соединен со входом формирователя дальномерного сигнала, первый выход которого подключен к третьему входу коммутатора НКУ, второй выход формирователя дальномерного сигнала соединен со входом «старт» блока измерения дальности, блок поиска ТК и соединенный с ним дешифратор ТК, выходом которого являются ТК или КПИ, исполняемые по функциональному назначению для управления КА, входы блоков поиска команд и дальномерной последовательности параллельно подключены к выходу приемника КА, коммутатор КА, первый вход которого соединен с выходом дешифратора ТК, второй вход соединен с выходом блока поиска дальномерной последовательности, а третий вход подключен к выходу тактового генератора, первый выход коммутатора КА соединен с первым входом блока формирования пакета телеметрии.
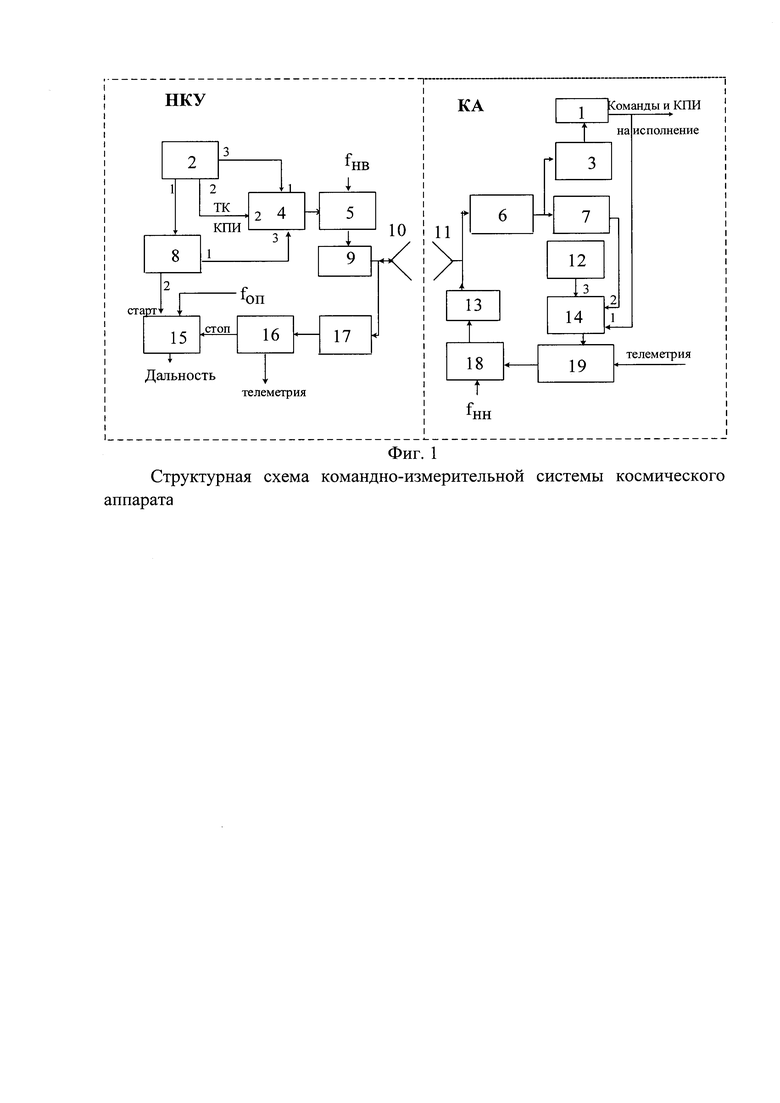
На фиг. 1 приведена структурная схема командно-измерительной системы космического аппарата.
КИС КА состоит из наземной части в рамках НКУ и бортовой части в рамках КА и содержит дешифратор команд 1, управляющий компьютер 2, блок поиска команд 3, коммутатор НКУ 4, модулятор НКУ 5, приемник КА 6, блок поиска дальномерного сигнала 7, блок формирования дальномерного сигнала 8, усилитель мощности НКУ 9, приемо-передающую антенну НКУ 10, приемопередающую антенну КА 11, тактовый генератор 12, усилитель мощности КА 13, коммутатор КА 14, блок измерения дальности 15, синхронизатор 16, приемник НКУ 17, модулятор КА 18, блок формирования пакета телеметрии 19.
Работает КИС КА следующим образом.
С выхода 3 управляющего компьютера 2 эпизодически или по указаниям оператора поступает импульсный сигнал на вход 1 коммутатора НКУ 4 с целью подготовки к передаче на КА команд или командно-программной информации с выхода 2 управляющего компьютера 2. После переключения коммутатора НКУ 4 с управляющего компьютера 2 на вход модулятора НКУ 5 поступают ТК или КПИ. Сигнал несущей частоты на восходящей линии, обозначенной fHB, подвергается модуляции в модуляторе НКУ 5 и затем, после усиления в усилителе мощности НКУ 9, излучается приемо-передающей антенной НКУ 10 в сторону КА. В моменты времени, когда ТК или КПИ не излучаются, с выхода 1 управляющего компьютера 2 формируется сигнал, переключающий коммутатор НКУ 4 в состояние, соединяющее выход и вход 3 коммутатора НКУ 4. Это необходимо для передачи на КА дальномерного сигнала, формируемого в блоке 8 по соответствующей команде с выхода 1 управляющего компьютера 2. Дальномерный сигнал поступает с выхода 1 блока формирования дальномерного сигнала 8 на вход 3 коммутатора НКУ 4 и модулирует в модуляторе НКУ 5 сигнал несущей частоты на восходящей линии fHB также, как это происходило с командным сигналом. После усиления мощности в блоке 9 дальномерный сигнал, как и в случае командного сигнала, излучается с помощью приемо-передающей антенны НКУ 10 в сторону КА. Сигнал с выхода 2 блока формирования дальномерного сигнала 8 является стартовым для запуска блока измерения дальности 15.
На стороне КА сигнал, принятый приемо-передающей антенной КА 11 поступает на вход приемника КА 6, к выходу которого параллельно подключены блоки поиска командного сигнала 3 и блок поиска дальномерного сигнала 7. На выходе блока поиска командного сигнала 3 имеет место командная последовательность и КПИ. В дешифраторе команд 1 производится распределение команд по назначению и направление их на исполнение. В блоке поиска дальномерного сигнала 7 выделяется дальномерный сигнал из принятой последовательности, который надлежит возвратить на НКУ для измерения дальности КА относительно НКУ. По специальной, заранее оговоренной команде, поступающей на вход 1 коммутатора КА 14 обеспечивается подключение входа 2 коммутатора КА 14 на его выход с целью подключения к блоку формирования пакета телеметрии 19. В результате этого принятый дальномерный сигнал с выхода блока 7 поиска дальномерного сигнала поступает на блок 19 формирования пакета телеметрии. В этом процессе принимает участие тактовый генератор 12, сигнал которого также проходит на вход блока 19 формирования пакета телеметрии во время передачи дальномерного сигнала с целью единства синхронизации бортовых источников телеметрической информации. Пакет информации с выхода блока 19 формирования пакета состоит из принятого дальномерного сигнала с выхода коммутатора КА 14 и следующей за ним телеметрической составляющей. Возвращаемый на НКУ дальномерный сигнал содержит соответствующий флаг для адекватного распознавания дальномерного сигнала на приемной стороне НКУ.
Сигнал с выхода блока 19 модулирует сигнал несущей частоты fHH на нисходящей линии связи в модуляторе КА 18 и, после усиления в усилителе мощности КА 13, излучается с помощью приемо-передающей антенны КА 11 в сторону НКУ.
Нисходящий сигнал с КА, принятый с помощью приемо-передающей антенны НКУ 10, подвергается в приемнике НКУ 17 стандартным процедурам обработки, т.е. усилению, преобразованию с понижением частоты и демодуляции. В блоке 16 синхронизации производится разделение телеметрических и дальномерных сигналов.
В момент запуска блока формирования дальномерного сигнала 8 по команде с выхода 1 управляющего компьютера 2 дальномерного сигнала производится излучение дальномерного сигнала и включается блок измерения дальности 15 (импульсом «старт»). По сигналу «стоп» с выхода синхронизатора 16 прекращается измерение дальности в блоке измерения дальности 15. Измерение двойной дальности производится путем подсчета количества импульсов опорного генератора fоп совпавших по времени с интервалом прохождения маркерным сигналом пути НКУ-КА-НКУ.
Как следует из описанного, ширина занимаемой полосы частот определяется командным сигналом, поскольку дальномерный сигнал излучается в промежутках времени, когда команды не передаются. Это позволяет уменьшить ширину полосы пропускания, как минимум, в два раза, что, соответственно, повышает помехоустойчивость передачи командных и дальномерных сигналов в рамках предложенного технического решения.
Дальность КА в этом случае рассчитывается по формуле:

Где: Тизм - измеряемый интервал времен между импульсами «Старт» и «Стоп», Тнку, Тка - аппаратная задержка сигнала в трактах НКУ и, соответственно, КА.
Суммарное значение Тнку + Тка является величиной постоянной и слабозависящей от условий эксплуатации. Ее легко оценить на этапе испытаний КИС КА и использовать в штатной работе в качестве корректирующего коэффициента.
Список литературы
1. Б. Скляр. Цифровая связь. Москва-С-Петербург-Киев, 2003. с. 681
2. Информационное сообщение CCSDS 414.0-G-0. Зеленая книга, январь 2010 г.
3. Баскаков С.И. "Радиотехнические цепи и сигналы" (3-е издание, 2000 год).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2625171C2 |
| КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2620591C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2658396C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА РЕТРАНСЛЯЦИИ ДЛЯ ИНФОРМАЦИОННОГО ОБМЕНА С КОСМИЧЕСКИМИ И НАЗЕМНЫМИ АБОНЕНТАМИ | 2011 |
|
RU2503127C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ В ПОЛЕТЕ И НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2588178C1 |
| КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2563925C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| Контрольно-проверочная аппаратура космического аппарата | 2018 |
|
RU2717293C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
Изобретение относится к области радиотехники и, более конкретно, к командно-измерительным системам (КИС) космических аппаратов (КА). Технический результат заключается в повышении помехоустойчивости линии передачи командных и дальномерных сигналов в процессе управления КА, расположенных на геостационарной орбите. Такой результат достигается за счет того, что реализуется неодновременная передача командных и дальномерных сигналов по одному и тому каналу связи обеспечивается уменьшение ширины полосы пропускания относительно прототипа как минимум в два раза. Дальномерный сигнал излучается в промежутках времени, когда команды не передаются. В момент передачи команды измерение дальности приостанавливается, это не влияет на точность измерения, поскольку изменение дальности до КА является очень медленной функцией. В целом это приводит к повышению помехоустойчивости линии передачи командных и дальномерных сигналов в рамках предложенного технического решения. 1 ил.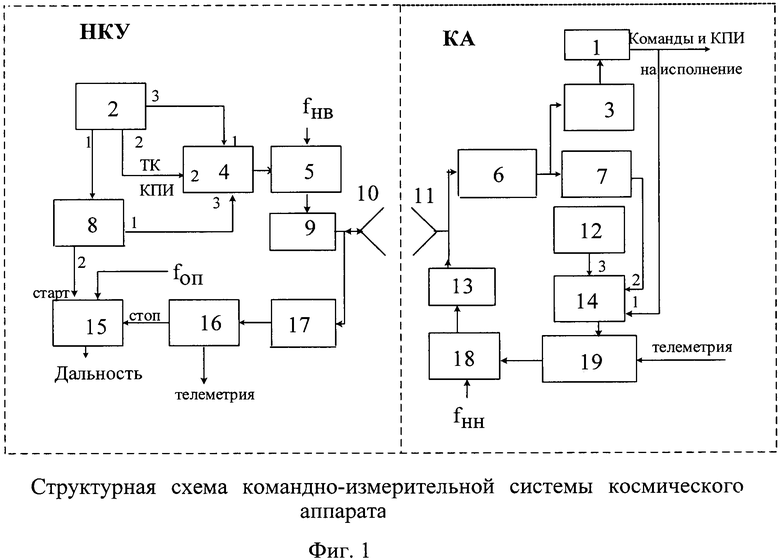
Командно-измерительная система космического аппарата, содержащая последовательно соединенные модулятор НКУ, усилитель мощности НКУ, приемо-передающую антенну НКУ, а также модулятор КА, усилитель мощности КА, приемо-передающую антенну КА, приемник КА, а также блок формирования дальномерного сигнала, последовательно соединенные блок формирования телеметрического пакета, модулятор КА, а также блок измерения дальности, тактовый генератор, блок синхронизации, приемник НКУ, по входу соединенный с приемо-передающей антенной НКУ, а по выходу - с блоком синхронизации, выход которого соединен со входом «стоп» блока измерения дальности, отличающаяся тем, что в нее дополнительно введены управляющий компьютер, коммутатор НКУ, первый вход которого соединен с третьим выходом управляющего компьютера, второй вход коммутатора НКУ соединен со вторым выходом управляющего компьютера, а первый выход управляющего компьютера соединен со входом блока формирования дальномерного сигнала, первый выход которого подключен к третьему входу коммутатора НКУ, второй выход блока формирования дальномерного сигнала соединен со входом «старт» блока измерения дальности, а также блок поиска команд и соединенный с ним дешифратор команд, выходом которого являются команды или КПИ, исполняемые по функциональному назначению для управления КА, входы блоков поиска команд и поиска дальномерного сигнала параллельно подключены к выходу приемника КА, коммутатор КА, первый вход которого соединен с выходом дешифратора команд, второй вход соединен с выходом блока поиска дальномерного сигнала, а третий вход подключен к выходу тактового генератора, первый выход коммутатора КА соединен со входом блока формирования телеметрического пакета.

