Область техники, к которой относится изобретение
Изобретение относится к радиотехнике и может использоваться для летных настроек и проверок наземных средств радиотехнического обеспечения полетов:
- радиомаячных систем (РМС) обеспечения инструментального захода воздушных судов на посадку (PMC7ILS и РМС/СП метрового диапазона волн, посадочной радиомаячной группы ПРМГ дециметрового диапазона волн), включающих в себя: курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ), маркерный радиомаяк (МРМ) и дальномерный канал в ПРМГ;
- радионавигационных систем (РНС): азимутальных и дальномерных радиомаяков систем ближней навигации (PMA/VOR, РМД/DME и РСБН);
- автоматических радиопеленгаторов (АРП).
Уровень техники
Упомянутые радиотехнические системы для подтверждения выходных характеристик при вводе в эксплуатацию, периодически в процессе их эксплуатации и в некоторых специальных случаях подвергаются летным проверкам. [1. Приказ Министерства транспорта Российской Федерации (Минтранс России) от 18 января 2005 г. N 1 г.Москва, Об утверждении Федеральных авиационных правил "Летные проверки наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации", «Российская газета» - Федеральный выпуск №3733 от 31 марта 2005 г]. При этом в качестве метрологического метода для проверки PMC/ILS, РМС/СП, ПРМГ используется метод, включающий в себя наземные угломерные измерения координат траектории полета самолета с высокой точностью с помощью оптических приборов, а для проверки PMA/VOR, РМД/DME и РСБН и АРП используется метод опорных точек, т.е. метод, включающий в себя определение координат воздушного судна в моменты пролета над заданными точками с известными географическими координатами на земной поверхности (наземными ориентирами). Для целей летных проверок наземных средств радиотехнического обеспечения полетов используется специальный самолет-лаборатория, на котором установлены измерительные приемники и УКВ связная радиостанция, в диапазоне которой работает АРП. При этом измеряют координаты воздушного судна оптическим устройством и одновременно при работе радиотехнических средств формируют установленными на борту воздушного судна бортовыми приемниками радионавигационные измерительные сигналы, обрабатывают совместно сигналы с выхода оптического устройства и измерительные сигналы, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов. Методика летных проверок, объем и их периодичность изложены в упомянутых Федеральных авиационных правилах. Недостатком известного способа летных настроек и проверок является необходимость применения специализированного самолета-лаборатории, что обуславливает большие затраты и соответственно высокую стоимость этих работ, не позволяет оперативно контролировать выходные характеристики РМС, РНС и АРП в период между плановыми проверками, делает недоступным его применение при проведении научно-исследовательских работ и в учебном процессе.
Известно первое устройство летной проверки курсовых, глиссадных, маркерных, радиомаяков, содержащее самолет-лабораторию, приемник сигналов курсового радиомаяка, приемник сигналов глиссадного радиомаяка, бортовой приемопередатчик радиодальномера, приемник сигналов маркерного радиомаяка, барометрический высотомер, устройство траекторных измерений и регистрирующее устройство [2. Методические указания по летной проверке наземных радиомаяков инструментальной системы посадки аппаратурой летного контроля АЛК-70. М. ГОСНИИГА, 1976, 49 с.]. Недостатком первого устройства является то, что для его реализации необходима самолет-лаборатория, что обуславливает большие эксплуатационные затраты первого устройства, снижает оперативность летных проверок курсовых, глиссадных, маркерных, радиомаяков.
Известно второе устройство для летной проверки азимутальных и дальномерных радионавигационных маяков, содержащее самолет-лабораторию, бортовой приемник сигналов азимутального канала радионавигационного маяка, бортовой приемопередатчик дальномерного радионавигационного маяка, барометрический высотомер, оптический прибор для определения момента пролета самолета-лаборатории над ориентирами с известными географическими координатами [3. Радиомаяки радиотехнической системы ближней навигации. Методы летных испытаний. ГОСТ 26904-86. ИПК. Издательство стандартов. 1997] Недостатком второго устройства является то, что для его реализации необходима самолет-лаборатория, что обуславливает большие эксплуатационные затраты первого устройства, снижает оперативность летных проверок азимутальных и дальномерных радионавигационных маяков.
Известно третье устройство летной проверки автоматических радиопеленгаторов, включающее самолет-лабораторию, УКВ передатчик (связную УКВ радиостанцию), оптический прибор для определения момента пролета самолета-лаборатории над ориентирами с известными географическими координатами.
Недостатком третьего устройства является то, что для его реализации необходима самолет-лаборатория, что обуславливает большие эксплуатационные затраты третьего устройства, снижает оперативность летных проверок автоматических радиопеленгаторов.
Раскрытие изобретения
Предлагаемый способ летной проверки наземных средств радиотехнического обеспечения полетов решает задачу повышения оперативности проверок упомянутых средств, снижения затрат на выполнение проверок и заключается в том, что в качестве воздушного судна для летной проверки упомянутых средств применяют дистанционно пилотируемый летательный аппарат (ДПЛА), измеряют с высокой точностью координаты ДПЛА оптическим устройством или иным высокоточным устройством и одновременно при работе упомянутых радиотехнических средств формируют установленными на борту воздушного судна бортовыми приемниками радионавигационные измерительные сигналы, которые кодируют, излучают в свободное пространство, принимают на Земле наземными устройствами, декодируют, обрабатывают совместно с сигналами с выхода оптического устройства, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов.
При летной проверке курсовых, глиссадных и маркерных радиомаяков измеряют угловые координаты ДПЛА с помощью наземных устройств траекторных измерений. При летной проверке азимутальных и дальномерных радионавигационных маяков обеспечивают пролет ДПЛА над заданными ориентирами, географические координаты которых предварительно занесены в блок памяти наземного устройства. Получаемые на борту ДПЛА радионавигационные измерительные сигналы кодируются и передаются на Землю, где они принимаются, декодируются и поступают на вход вычислителя. В моменты пролета ДПЛА над ориентирами, которые определяется оператором ДПЛА с помощью установленной на борту телевизионной передающей камеры, оператор дает команду блоку памяти о передаче географических координат соответствующих ориентиров на второй вход вычислителя. При поступлении сигналов на оба входа вычислителя последний вычисляет ошибки радионавигационной системы и передает их на вход устройства регистрации.
При летной проверке автоматических радиопеленгаторов по излучению сигналов УКВ передатчика, установленного на борту ДПЛА, измеряют пеленг ДПЛА автоматическим радиопеленгатором. Эта информация о пеленге ДПЛА поступает от АРП через устройство считывания на первый вход вычислителя. В моменты пролета ДПЛА над заданными наземными ориентирами оператор ДПЛА дает команду блоку памяти на передачу на второй вход вычислителя географических координат соответствующего ориентира, вычислитель вычисляет ошибки пеленга АРП и передает их на устройство регистрации.
Предложенное первое устройство, предназначенное для летной проверки курсовых, глиссадных и маркерных радиомаяков, включает в себя ДПЛА и установленные на борту ДПЛА: приемник сигналов курсового радиомаяка, приемник сигналов глиссадного радиомаяка, бортовой приемопередатчик радиодальномера, приемник сигналов маркерного радиомаяка, барометрический высотомер, блок кодирования и передающее устройство, а на Земле: приемное устройство, блок декодирования, вычислитель с первым и вторым входами и с первым и вторым выходами, пульт оператора ДПЛА, устройство траекторных измерений и регистрирующее устройство, при этом на борту ДПЛА выходы приемников курсового радиомаяка, глиссадного радиомаяка, маркерного радиомаяка, выход приемника бортового приемопередатчика радиодальномера и выход барометрического высотомера соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства; на Земле выход приемного устройства последовательно соединен с блоком декодирования, первым входом вычислителя, первый выход которого соединен с входом пульта оператора ДПЛА; выход устройства траекторных измерений соединен со вторым входом вычислителя; второй выход вычислителя соединен с входом регистрирующего устройства.
Сигналы, излучаемые КРМ, ГРМ, радиодальномером и МРМ, принимаются на борту ДПЛА соответствующими приемниками, преобразуются в измерительные сигналы, которые поступают на вход блока кодирования и далее излучаются в свободное пространство. Принятые на Земле сигналы декодируются и передаются на первый вход вычислителя. На второй вход вычислителя поступают сигналы об угловых координатах воздушного судна. По величинам токов сигналов с приемного устройства и величинам токов с устройства траекторных измерений по известным методикам определяются выходные параметры КРМ и ГРМ, определяется соответствие измеренных параметров требованиям нормативных документов. По величине напряжения на выходе приемника МРМ определяется момент пролета самолета над маркерным маяком и его зона действия.
Предложенное второе устройство, предназначеное для летной проверки азимутальных и дальномерных радионавигационных маяков, включает в себя ДПЛА и установленные на борту ДПЛА: приемник сигналов азимутального канала радионавигационного маяка, бортовой приемопередатчик дальномерного радионавигационного маяка, приемник сигналов спутниковой навигационной системы, барометрический высотомер, телевизионную передающую камеру, блок кодирования и передающее устройство, а на Земле: приемное устройство, блок декодирования, пульт оператора ДПЛА с одним входом и двумя выходами, блок памяти географических координат наземных ориентиров с управляющим входом (блок памяти), вычислитель, устройство регистрации; при этом на борту ДПЛА выход приемника азимутального радионавигационного маяка, выход приемника бортового приемопередатчика дальномерного радионавигационного маяка, выход приемника сигналов спутниковой навигационной системы, выходы передающей телевизионной камеры и барометрического высотомера соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства; а на Земле выход приемного устройства последовательно соединен с блоком декодирования, входом пульта оператора ДПЛА, первый выход которого соединен с управляющим входом блока памяти географических координат наземных ориентиров, с первым входом вычислителем, с устройством регистрации. При этом второй выход пульта оператора соединен со вторым входом вычислителя.
Третье устройство, предназначенное для летной проверки автоматических радиопеленгаторов, включает в себя ДПЛА, установленные на борту ДПЛА: УКВ передатчик, передающую телевизионную камеру, приемник сигналов спутниковой навигационной системы, барометрический высотомер, блок кодирования и передающее устройство и установленные на Земле: приемное устройство, блок декодирования, пульт оператора, устройство считывания пеленга, блок памяти географических координат наземных ориентиров, вычислитель с первым и вторым входами и выходом, устройство регистрации; при этом на борту ДПЛА выходы передающей телевизионной камеры и барометрического высотомера, выход приемника спутниковой навигационной системы соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства, а на Земле выход приемного устройства последовательно соединен с входом блока декодирования, пультом оператора ДПЛА, блоком памяти географических координат наземных ориентиров, первым входом вычислителя, а вход устройства считывания пеленга соединено с АРП, а выход соединен со вторым входом вычислителя, выход которого соединен с устройством регистрации.
Измерения характеристик РНС и АРП производят в моменты пролета ДПЛА над опорными точками - ориентирами. Ошибки в измерении азимута (пеленга) и дальности РНС и АРП вычисляются по известным географическим координатам опорных точек на земной поверхности, географическим координатам позиций антенн радиосистем и измеренным радионавигационным координатам ДПЛА в местной системе координат в момент его пролета над опорными точками. ДПЛА совершает полет по заранее намеченному маршруту, пересекающему на своем пути ряд характерных (опорных) точек на земной поверхности с известными географическими координатами. Момент пролета ДПЛА над опорной точкой определяется оператором по телевизионному изображению точки на земной поверхности. В этот момент оператор ДПЛА дает команду с пульта оператора на управляющий вход блока памяти о передаче на вход вычислителя географических координат соответствующего ориентира. На второй вход вычислителя поступают радионавигационные координаты ДПЛА, получаемые от установленных на его борту приемников - в случае летных проверок РНС или от автоматического радиопеленгатора - в случае летных проверок АРП. Полученные ошибки РНС и АРП регистрируются.
Применение предложенного способа и устройств его реализации позволяет повысить оперативность проверок, существенно снизить затраты на выполнение летных настроек и проверок КРМ, ГРМ и МРМ радиомаячных систем (РМС) инструментального обеспечения захода самолетов на посадку, азимутально-дальномерных радионавигационных систем (РНС) и автоматических радиопеленгаторов (АРП).
Снижение затрат на выполнение летных настроек и проверок делает их доступными при разработке и летных испытаниях новых образцов систем посадки и радионавигационных систем для гражданской авиации и военной авиации наземного и морского базирования, при неплановых проверках радиосистем в связи с замечаниями или жалобами военных пилотов или пилотов рейсовых гражданских самолетов, при выполнении научно-исследовательских работ в области радиомаячных систем посадки летательных аппаратов и радионавигационных систем и при обучении студентов и на курсах повышения квалификации специалистов гражданской и военной авиации, Сущность изобретения поясняется далее чертежами.
Краткое описание чертежей
На фиг.1 представлена блок-схема устройств для выполнения летных проверок наземных средств радиотехнического обеспечения полетов.
На фиг.2 представлена блок-схема оборудования, установленного на борту ДПЛА, первого устройства, предназначенного для выполнения летных проверок РМС: КРМ, ГРМ и МРМ.
На фиг.3 представлена блок-схема наземного оборудования первого устройства, предназначенного для выполнения летных проверок РМС: КРМ, ГРМ и МРМ.
На фиг.4 представлена блок-схема оборудования, установленного на борту ДПЛА, второго устройства, предназначенного для выполнения летных проверок РНС.
На фиг.5 представлена блок-схема наземного оборудования второго устройства, предназначенного для выполнения летных проверок РНС.
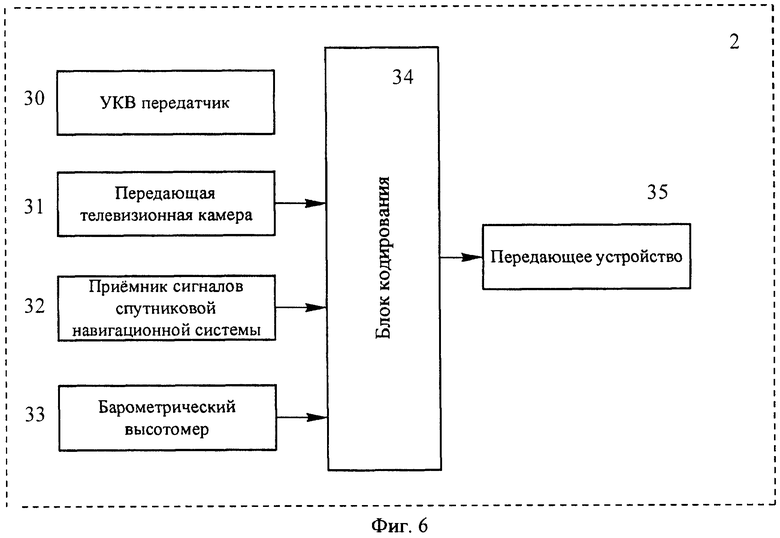
На фиг.6 представлена блок-схема оборудования, установленного на борту ДПЛА, третьего устройства, предназначенного для выполнения летных проверок АРП.
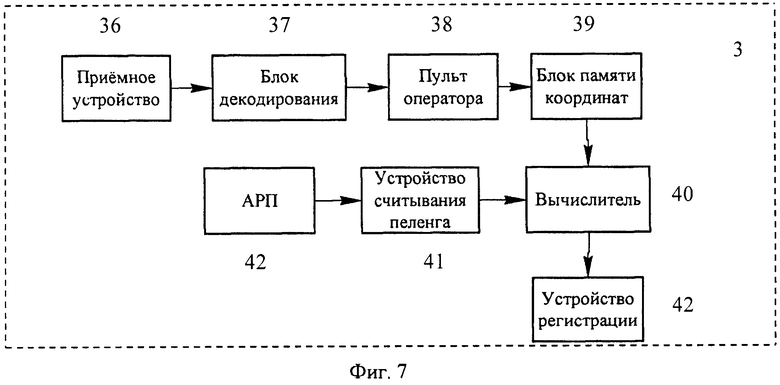
На фиг.7 представлена блок-схема наземного оборудования третьего устройства, предназначенного для выполнения летных проверок АРП.
Осуществление изобретения
Для осуществления изобретения используют один из известных вариантов дистанционно пилотируемого летательного аппарата российских или зарубежных производителей, способных нести на себе массу полезной нагрузки более 10 кг: "ГРАНТ" (гражданский авиационный наблюдатель телевизионный), "ДОЗОР", "Yamaxa В max" и др. Они имеют дальность полета в несколько десятков километров. Для реализации малогабаритных, мало энергоемких блоков бортовой и наземной аппаратуры применяют микропроцессоры, использующие современные цифровые методы обработки сигналов. В качестве примера реализации блоков может служить приемник сигналов посадки и навигации "Analyzer ILS/VOR", выпускаемый НПО "Радиотехнические системы", г.Челябинск. Упомянутый прибор имеет массу 1,4 кг, время работы 6 часов от встроенных аккумуляторных батарей. Не вызывает проблем разработка аналогичных по массе и габаритам приборов для приема сигналов РМС и РСБН дециметрового диапазона. В качестве устройства для измерения угловых координат может быть использовано находящееся в эксплуатации "Устройство траекторией записи - УТЗ" или более современная автоматическая система траекторных измерений АСТИ.
Обратимся теперь к фиг.1, на которой представлена блок-схема устройств для выполнения летных проверок радиомаячных систем посадки, азимутально-дальномерных радионавигационных систем и автоматических радиопеленгаторов в соответствии с настоящим изобретением. Упомянутые устройства включают в себя дистанционно пилотируемый летательный аппарат 1, оборудование, установленное на борту ДПЛА, наземное оборудование.
Далее рассмотрено три устройства по настоящему изобретению. Первое устройство предназначено для выполнения летных проверок РМС: КРМ, ГРМ, МРМ. Второе устройство предназначено для выполнения летных проверок РНС.
Третье устройство предназначено для выполнения летных проверок АРП.
Первое устройство
Первое устройство содержит ДПЛА, оборудование, установленного на борту ДПЛА, и наземное оборудование.
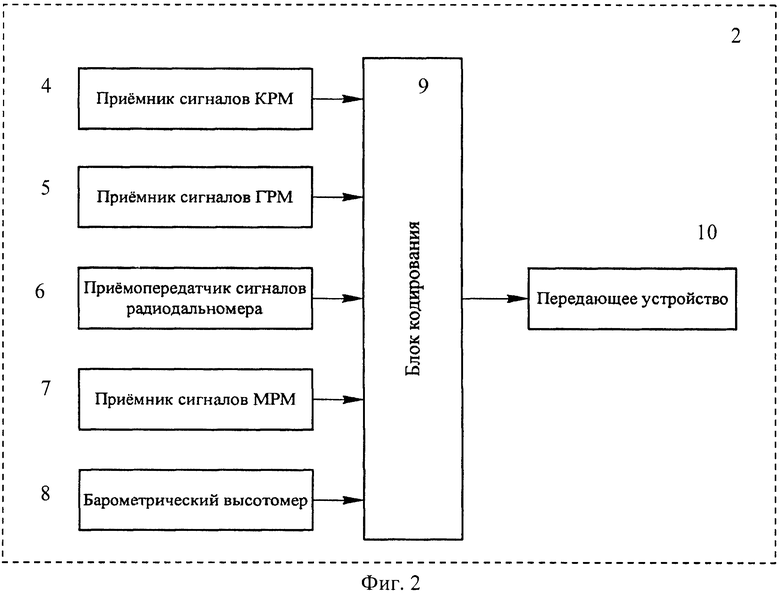
Оборудование, установленное на борту ДПЛА, представлено блок-схемой на фиг.2, содержит приемник сигналов КРМ 4, приемник сигналов ГРМ 5, приемопередатчик сигналов радиодальномера 6, приемник сигналов маркерного радиомаяка 7, барометрический высотомер 8, блок кодирования 9, передающее устройство 10.
Упомянутые блоки соединены между собой следующим образом. Выходы приемника сигналов КРМ 4, приемника сигналов ГРМ 5, приемника сигналов радиодальномера 6, приемника сигналов МРМ 7, барометрического высотомера 8 соединены с соответствующими входами блока кодирования 9, выход которого соединен с входом передающего устройства 10.
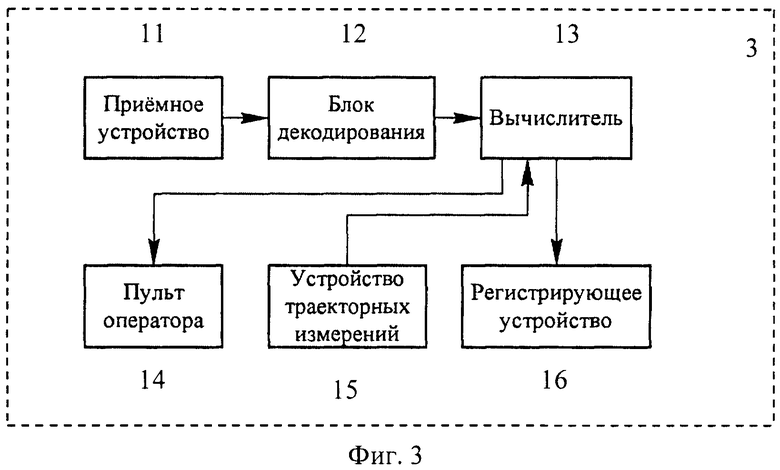
Наземное оборудование 3 упомянутого первого устройства, представленное блок-схемой на фиг.3, содержит приемное устройство 11, блок декодирования 12, вычислитель 13 с первым и вторым входами и первым и вторым выходами, пульт оператора ДПЛА 14, устройство траекторных измерений 15, регистрирующее устройство 16.
В наземном оборудовании 3 выход приемного устройства 11 последовательно соединен с блоком декодирования 12, первым входом вычислителя 13, первый выход которого соединен с входом пульта оператора 14 ДПЛА; устройство траекторных измерений 15 соединено со вторым входом вычислителя 13; второй выход вычислителя 13 соединен с входом регистрирующего устройства 16.
В качестве ДПЛА применяют один из известных вариантов дистанционно управляемого беспилотного летательного аппарата российских или зарубежных производителей: "ГРАНТ" (гражданский авиационный наблюдатель телевизионный), "ДОЗОР", "Yamaxa В max" и др. В качестве приемника сигналов КРМ 4 и приемника сигналов ГРМ 5 может служить приемник сигналов посадки и навигации "Analyzer ILS/VOR", выпускаемый НПО "Радиотехнические системы", г.Челябинск. Аналогичные приборы могут быть использованы для приема сигналов РМС и РСБН дециметрового диапазона. В качестве устройства для измерения угловых координат может быть использовано "Устройство траекторией записи - УТЗ" или автоматическая система траекторных измерений АСТИ.
Устройство работает следующим образом. Оператор управляет полетом ДПЛА с дальности 20 км по линии курса с одновременным тщательным выдерживанием ДПЛА на заданном угле в вертикальной плоскости (на глиссаде). При этом сигналы, излучаемые КРМ 4, ГРМ 5, МРМ 7 и радиодальномером 6, принимаются на борту ДПЛА соответствующими приемниками. Приемник сигналов КРМ 4 вырабатывает сигнал в виде тока, пропорциональному угловому отклонению ДПЛА от плоскости курса. Величина этого тока также прямо пропорциональна информационному параметру (РГМ): разности глубин модуляции при работе с КРМ метрового диапазона волн или разности коэффициента разнослышимости (КРС) при работе с КРМ дециметрового диапазона волн. Приемник сигналов ГРМ 5 вырабатывает сигнал в виде тока, пропорциональному угловому отклонению ДПЛА относительно плоскости глиссады. Величина этого тока также прямо пропорциональна информационному параметру РГМ или КРС. Бортовой ток приемника КРМ 4 и бортовой ток приемника ГРМ 5 далее называются измерительными сигналами. Измерительные сигналы поступают на вход блока кодирования 9. Кроме того, на блок кодирования 9 поступают сигналы от приемника бортового приемопередатчика радиодальномера 6, приемника маркерного радиомаяка 7, барометрического высотомера 8. Упомянутые сигналы в закодированном виде поступают на вход передающего устройства 10 и далее излучаются в свободное пространство. Принятые на Земле измерительные сигналы и сигналы радиодальномера декодируются и передаются на первый вход вычислителя 13. На второй вход вычислителя 13 поступают сигналы об угловых координатах летательного аппарата от устройства траекторных измерений. По величинам токов измерительных сигналов с приемных устройств КРМ 4 и ГРМ 5, дальности и величинам токов с устройства траекторных измерений по известным методикам определяются выходные параметры радиомаяков, определяется соответствие измеренных параметров требованиям нормативных документов.
Во время пролета ДПЛА над маркерным радиомаяком, маркерный приемник принимает сигнал оповещения, который кодируются и поступает на вход передающего устройства. На Земле, по принятым и декодированным сигналам вычислитель определяет зону действия МРМ на линии курса и глиссады.
Радионавигационные измерительные сигналы КРМ и ГРМ, сигналы барометрического высотомера, индицируемые на пульте оператора ДПЛА, используются оператором для управления ДПЛА.
Основные параметры, определяемые летными измерениями по каналу курса:
- отклонение линии курса от установленного положения,
- структура искривлений курса,
- ширина сектора курса,
- крутизна характеристики курсового радиомаяка,
- асимметрия крутизны характеристики КРМ,
- зона действия,
- зависимость коэффициента разнослышимости (для аппаратуры ПРМГ) или разности глубины модуляции от углового отклонения,
- составляющая вертикальной поляризации поля. По каналу глиссады определяются:
- отклонение линии глиссады от установленного положения,
- структура искривлений глиссады,
- границы полусектора выше и ниже линии глиссады,
- крутизна характеристики ГРМ,
- асимметрия крутизны характеристики ГРМ,
- зона действия,
- зависимость КРС или РГМ от углового отклонения,
- зона действия.
По каналу дальности определяются:
- зона действия,
- погрешность измерения дальности.
Барометрический высотомер используется для контроля высоты пролета над МРМ.
В другом варианте первого устройства на борту ДПЛА устанавливают проблесковый светосигнальный излучатель, который включается командой с Земли при недостаточной видимости летательного аппарата, а также при поиске летательного аппарата в случае его вынужденной посадки.
Второе устройство
Теперь обратимся ко второму устройству, предназначенному для выполнения летных проверок РНС.
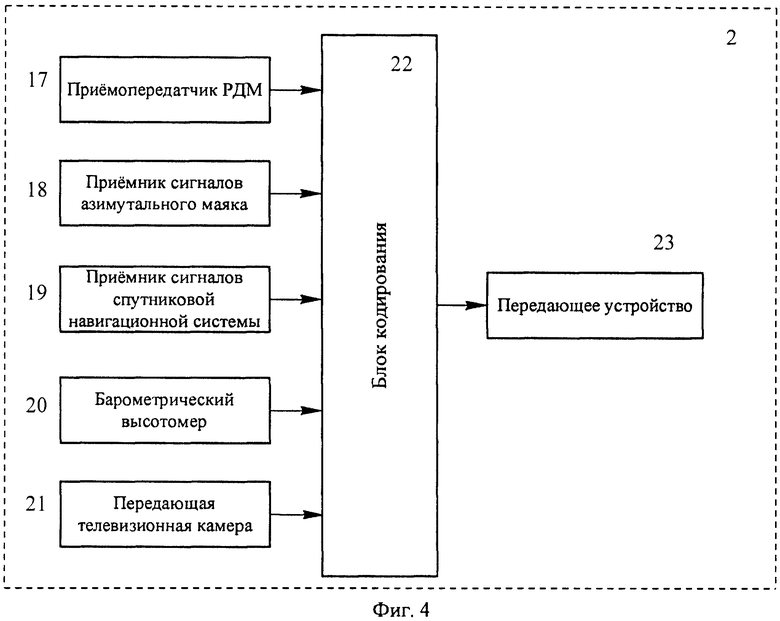
Второе устройство состоит из ДПЛА 1, оборудования 2, установленного на борту ДПЛА, и наземного оборудования 3. Оборудование 2, установленное на борту ДПЛА, представлено блок-схемой на фиг.4, содержит приемник сигналов азимутального канала 18, приемник сигналов спутниковой навигационной системы 19, барометрический высотомер 20, передающую телевизионную камеру 21, блок кодирования информации 22, передающее устройство 23. При проведении летных проверок РНС в составе PMA/VOR и РМД/RME или РНС РСБН используются соответствующие приемники азимутального канала и бортовые приемопередатчики радиодальномеров.
Указанные выше блоки устройства соединены между собой следующим образом. Выходы приемника бортового приемопередатчика радиодальномерного маяка 17, приемника сигналов азимутального маяка 18, приемника сигналов спутниковой навигационной системы 19, барометрического высотомера 20, передающей телевизионной камеры 21, соединены с соответствующими входами блока кодирования 22, выход которого соединен с входом передающего устройства 23. При этом ось объектива телевизионной камеры ориентирована вертикально вниз, что позволяет определить момент пролета ДПЛА над опорной точкой с известными географическими координатами.
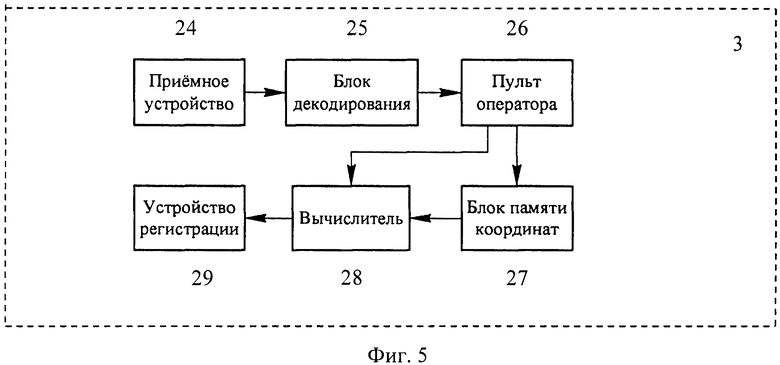
Наземное оборудование 3 представлено блок-схемой на фиг.5, содержит приемное устройство 24, блок декодирования 25, пульт оператора ДПЛА 26 с одним входом и двумя выходами, блок памяти 27 географических координат наземных ориентиров, вычислитель 28 с двумя входами и одним выходом и устройство регистрации 29.
В наземном оборудовании 3 выход приемного устройства 24 последовательно соединен с блоком декодирования 25, входом пульта оператора ДПЛА 26, первый выход которого соединен с управляющим входом блока памяти 27 географических координат наземных ориентиров, с первым входом вычислителя 28, с устройством регистрации 29. При этом второй выход пульта оператора ДПЛА 26 соединен со вторым входом вычислителя 28.
Измерения характеристик РНС производят в моменты пролета ДПЛА над наземными ориентирами. Ошибки в измерении азимутальной и дальномерной координат ДПЛА вычисляются по известным географическим координатам наземных ориентиров, географическим координатам РНС (АРП) и измеренным радионавигационным координатам ДПЛА в местной системе координат (с началом в точке размещения антенны РНС) в момент его пролета над наземными ориентирами. Примеры реализации ДПЛА и блоков второго устройства аналогичны примерам, представленным в первом устройстве.
Второе устройство работает следующим образом. ДПЛА совершает полет по заранее намеченному маршруту, пересекающему на своем пути ряд характерных ориентиров на земной поверхности с известными географическими координатами. Это могут быть триангуляционные пункты, церкви и другие сооружения с четко локализованной геометрией и хорошо заметные с высоты полета воздушного судна. Момент пролета ДПЛА над наземным ориентиром определяется по телевизионному изображению ориентира на земной поверхности. В этот момент оператор ДПЛА командой с пульта оператора 26 на блок памяти 27 вводит из него в вычислитель 28 географические координаты соответствующих ориентиров. При этом на другой вход вычислителя 28 поступают радионавигационные сигналы, получаемые с ДПЛА. При поступлении сигналов на оба входа вычислителя 28 он определяет разности радионавигационных и географических координат ориентиров и передает эти параметры на устройство регистрации 29.
Сигналы спутниковой навигационной системы 19, индицируемые на пульте оператора ДПЛА 26, используются оператором для управления ДПЛА.
Барометрический высотомер 20 используется для контроля высоты пролета над наземными ориентирами и при полете на маршруте.
В другом варианте второго устройства на борту летательного аппарата устанавливают проблесковый светосигнальный излучатель, который включается командой с Земли при недостаточной видимости летательного аппарата, а также при поиске летательного аппарата в случае его вынужденной посадки.
Третье устройство.
Теперь обратимся третьему устройству, предназначенному для выполнения летных проверок АРП. Третье устройство состоит из ДПЛА 1, оборудования 2, установленного на борту ДПЛА, и наземного оборудования 3.
Оборудование, установленное на борту ДПЛА, представлено блок-схемой на фиг.6, содержит телевизионную передающую камеру 31, приемник сигналов спутниковой навигационной системы 32, барометрический высотомер 33, блок кодирования 34, передающее устройство 35, УКВ передатчик 30.
Указанные выше блоки устройства соединены между собой следующим образом. Выходы телевизионной передающей камеры 31, приемника сигналов спутниковой навигационной системы 32, барометрического высотомера 33, УКВ передатчика 30 соединены с соответствующими входами блока кодирования 34, выход которого соединен с передающим устройством 35. При этом ось объектива телевизионной камеры 31 ориентирована вертикально вниз, что позволяет определить момент пролета ДПЛА над опорной точкой с известными географическими координатами.
Наземное оборудование 3 представлено блок-схемой на фиг.7, содержит приемное устройство 36, блок декодирования 37, пульт оператора ДПЛА 38, блок памяти 39 географических координат наземных ориентиров, вычислитель 40 с двумя входами и одним выходом, устройство считывания 41.
В наземном оборудовании выход приемного устройства 36 последовательно соединен с блоком декодирования 37, пультом оператора 38 ДПЛА, блоком памяти 39 географических координат наземных ориентиров, первым входом вычислителя 40, устройством регистрации 42. Вход устройства считывания 41 соединен с АРП 42, а его выход со вторым входом вычислителя 40.
Измерения характеристик АРП производят путем измерения пеленга сигналов УКВ передатчика, установленного на ДПЛА. Ошибки в измерении пеленга ДПЛА вычисляются по известным географическим координатам наземных ориентиров, географическим координатам АРП и измеренным значениям пеленга ДПЛА в местной системе координат (с началом в точке размещения антенны АРП) в момент его пролета над наземными ориентирами. Примеры реализации ДПЛА и блоков третьего устройства аналогичны примерам, представленным в первом устройстве.
Третье устройство работает следующим образом. ДПЛА совершает полет по заранее намеченному маршруту, пересекающему на своем пути ряд наземных ориентиров: характерных точек на земной поверхности с известными географическими координатами. Это могут быть триангуляционные пункты, церкви и другие сооружения с четко локализованной геометрией и хорошо заметные с высоты полета воздушного судна. АРП в процессе полета ДПЛА измеряет его пеленг по сигналам УКВ передатчика 30 и с помощью устройства считывания 41 передает эти значения пеленга на первый вход вычислителя 40. В момент пролета ДПЛА над ориентиром, который определяется оператором ДПЛА по телевизионному изображению ориентира на земной поверхности, оператор дает команду на управляющий вход блока памяти 39 о введении угловых географических координат соответствующего ориентира на второй вход вычислителя 40. При поступлении сигналов на оба входа вычислителя 40 он производит вычисление разности пеленга ДПЛА и угловой географической координаты ориентира. Эта величина ошибки пеленга АРП регистрируется устройством регистрации 42.
Сигналы спутниковой навигационной системы 32 и барометрического высотомера 33, индицируемые на пульте оператора 38 ДПЛА, используются оператором для управления ДПЛА.
В другом варианте третьего устройства на борту летательного аппарата устанавливают проблесковый светосигнальный излучатель, который включается командой с Земли при поиске летательного аппарата в случае его вынужденной посадки.
Применение изобретения
Изобретение может быть применено:
- при разработке и летных испытаниях новых образцов систем посадки и радионавигационных систем для гражданской авиации и военной авиации наземного и морского базирования,
- при вводе систем посадки и радионавигационных систем в эксплуатацию,
- при периодической плановой поверке радиосистем,
- при не плановых поверках радиосистем в связи с замечаниями или жалобами военных пилотов или пилотов рейсовых гражданских самолетов,
- при выполнении научно-исследовательских работ в области радиомаячных систем посадки летательных аппаратов и радионавигационных систем,
- при обучении студентов и на курсах повышения квалификации специалистов гражданской и военной авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЛЕТНОГО КОНТРОЛЯ НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ | 2022 |
|
RU2796411C1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2386176C2 |
Способ летной проверки наземных средств радиотехнического обеспечения полетов, заключающийся в том, что в качестве воздушного судна применяют дистанционно пилотируемый летательный аппарат (ДПЛА), измеряют координаты ДПЛА оптическим устройством и одновременно при работе упомянутых радиотехнических средств формируют бортовыми приемниками измерительные радионавигационные сигналы, которые кодируют, излучают в свободное пространство, принимают на Земле наземными устройствами, декодируют, обрабатывают совместно с сигналами с выхода оптического устройства, отображают и регистрируют результаты измерений и обработки сигналов. Описаны способ и устройства летной проверки выходных характеристик курсовых (КРМ), глиссадных (ГРМ), маркерных радиомаяков (МРМ), азимутально-дальномерных радиомаяков (АДРМ) и автоматических радиопеленгаторов (АРП). Достигаемый технический результат - расширение функциональных возможностей и снижение затрат на выполнение летных настроек и поверок КРМ, ГРМ, МРМ, АДРМ и АРП. 4 н. и 3 з.п. ф-лы, 7 ил.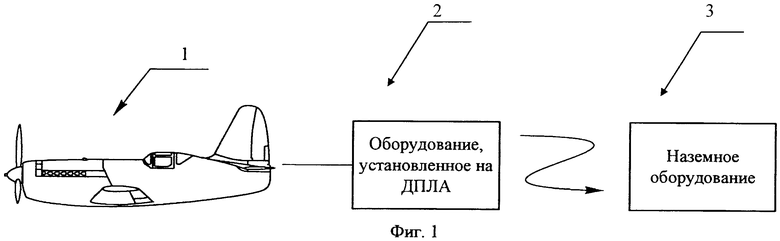
1. Способ летной проверки наземных средств радиотехнического обеспечения полетов, заключающийся в том, что измеряют координаты воздушного судна оптическим устройством и одновременно при работе радиотехнических средств формируют установленными на борту воздушного судна бортовыми приемниками радионавигационные измерительные сигналы, обрабатывают совместно сигналы с выхода оптического устройства и измерительные сигналы, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов, отличающийся тем, что в качестве радиотехнических средств используют курсовые, глиссадные, маркерные радиомаяки, азимутальные и дальномерные радионавигационные маяки, автоматические радиопеленгаторы, в качестве воздушного судна для летной проверки указанных радиотехнических средств обеспечения полетов применяют дистанционно пилотируемый летательный аппарат (ДПЛА), радионавигационные измерительные сигналы с выходов бортовых приемников кодируют, излучают в свободное пространство, принимают на Земле радиотехническими средствами, декодируют.
2. Способ по п.1, отличающийся тем, что для курсовых, глиссадных и маркерных радиомаяков измеряют угловые координаты ДПЛА с помощью радиотехнических средств траекторных измерений, одновременно полученные на борту ДПЛА радионавигационные измерительные сигналы кодируют, кодированные сигналы с помощью передающего устройства излучают в свободное пространство, принятые на Земле сигналы декодируют и путем совместной их обработки с сигналами устройства траекторных измерений преобразуют в выходные параметры упомянутых радиомаяков, результаты измерений и обработки отображают и регистрируют.
3. Способ по п.1, отличающийся тем, что для азимутальных и дальномерных радионавигационных маяков полученные на борту ДПЛА радионавигационные измерительные сигналы в момент пролета ДПЛА над наземными ориентирами кодируют и с помощью передающего устройства кодированные сигналы излучают в свободное пространство, принятые на Земле сигналы декодируют и путем совместной обработки с известными данными о географических координатах наземных ориентиров преобразуют в выходные параметры упомянутых маяков, результаты измерений и обработки отображают и регистрируют.
4. Способ по п.1, отличающийся тем, что для автоматических радиопеленгаторов измеряют угловые координаты ДПЛА радиопеленгатором в моменты пролета ДПЛА над заданными наземными ориентирами, путем совместной обработки данных о географических координатах наземных ориентиров и величин измеренных углов пеленга определяют выходные параметры радиопеленгатора, результаты измерений и совместной обработки отображают и регистрируют.
5. Устройство летной проверки курсовых, глиссадных, маркерных, радиомаяков способом по п.2, содержащее приемник сигналов курсового радиомаяка, приемник сигналов глиссадного радиомаяка, бортовой приемопередатчик радиодальномера, приемник сигналов маркерного радиомаяка, барометрический высотомер, устройство траекторных измерений и регистрирующее устройство, отличающееся тем, что дополнительно содержит ДПЛА, блок кодирования, передающее устройство, приемное устройство, блок декодирования, вычислитель с первым и вторым входами и с первым и вторым выходами, пульт оператора ДПЛА; при этом выходы приемников курсового радиомаяка, глиссадного радиомаяка, маркерного радиомаяка, выход приемника бортового приемопередатчика радиодальномера и выход барометрического высотомера соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства, причем упомянутые устройства установлены на борту ДПЛА; а на Земле выход приемного устройства последовательно соединен с блоком декодирования, первым входом вычислителя, первый выход которого соединен с входом пульта оператора ДПЛА; выход устройства траекторных измерений соединен со вторым входом вычислителя; второй выход вычислителя соединен с входом регистрирующего устройства.
6. Устройство для летной проверки азимутальных и дальномерных радионавигационных маяков способом по п.3, содержащее приемник сигналов азимутального канала радионавигационного маяка, бортовой приемопередатчик дальномерного радионавигационного маяка, барометрический высотомер, отличающееся тем, что дополнительно содержит ДПЛА, телевизионную передающую камеру, приемник сигналов спутниковой навигационной системы, блок кодирования и передающее устройство, приемное устройство, блок декодирования, пульт оператора ДПЛА с одним входом и двумя выходами, блок памяти координат наземных ориентиров, вычислитель, устройство регистрации; при этом на борту ДПЛА выход приемника азимутального радионавигационного маяка, выход приемника бортового приемопередатчика дальномерного радионавигационного маяка, выход приемника сигналов спутниковой навигационной системы, выходы передающей телевизионной камеры и барометрического высотомера соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства; а на Земле выход приемного устройства последовательно соединен с блоком декодирования, входом пульта оператора ДПЛА, первый выход которого соединен с блоком памяти координат наземных ориентиров, выход которого соединен с первым входом вычислителя, второй выход пульта оператора ДПЛА соединен со вторым входом вычислителя, выход которого соединен с устройством регистрации.
7. Устройство летной проверки автоматических радиопеленгаторов способом по п.4, включающее УКВ передатчик, барометрический высотомер, отличающееся тем, что дополнительно содержит ДПЛА, передающую телевизионную камеру, приемник сигналов спутниковой навигационной системы, блок кодирования, передающее устройство, приемное устройство, блок декодирования, пульт оператора, устройство считывания пеленга, блок памяти координат наземных ориентиров, вычислитель с первым и вторым входами и выходом, устройство регистрации; при этом на борту ДПЛА выходы передающей телевизионной камеры, барометрического высотомера, выход приемника спутниковой навигационной системы соединены с соответствующими входами блока кодирования, выход которого соединен с входом передающего устройства, а на Земле выход приемного устройства последовательно соединен с входом блока декодирования, пультом оператора ДПЛА, блоком памяти координат наземных ориентиров, первым входом вычислителя, а вход устройства считывания пеленга соединен с АРП, а его выход соединен со вторым входом вычислителя, выход которого соединен с устройством регистрации.
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| - М.: ГОСНИИГА, 1976, 49 с | |||
| Способ интенсификации тонкого размола клинкера в многокамерных трубчатых мельницах | 1955 |
|
SU102266A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| Мяльная машина для стеблей лубяных растений | 1934 |
|
SU39319A1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| US 6766226 B2, 20.07.2004 | |||
| US 6654709 B2, 25.11.2003. | |||

