Изобретение относится к области медицины, а именно к восстановительной медицине и реабилитации, и может быть использовано в реабилитации пациентов с центральными гемипарезами в позднем восстановительном периоде инсульта, а также с детским церебральным параличом легкой и средней степени тяжести.
Известно наиболее близкое по технической сущности устройство для коррекции нарушений локомоторной функции нижних конечностей: медицинская беговая дорожка SPLIT-BELT (Woodway GmbH, Германия-США, патент US 8308618 от 10.04.2009) с реечным разделенным посередине полотном, обеспечивающая контроль скорости независимо для каждой ноги. Недостатком данного устройства является низкая эффективность по причине наличия исключительно функции адаптации, направленной на приспособление пациента к условиям асимметричной ходьбы.
Технический результат: повышение эффективности способа коррекции двигательной активности нижних конечностей у пациентов с параличами путем не только адаптации, но и реабилитации центрального гемипареза.
Указанный технический результат достигается с помощью устройства, содержащего раздельное шаговое полотно, закрепленное на стальной раме с помощью передних вращающихся и двух задних свободновращающихся валов, лежащее на двух парах опорных полотен, между которыми неподвижно закреплены по четыре пружинных амортизатора и по четыре тензометрических датчика, и содержащее датчики Холла и электрическую тормозную систему, связанные с компьютером.
Изобретение поясняется чертежами, где:
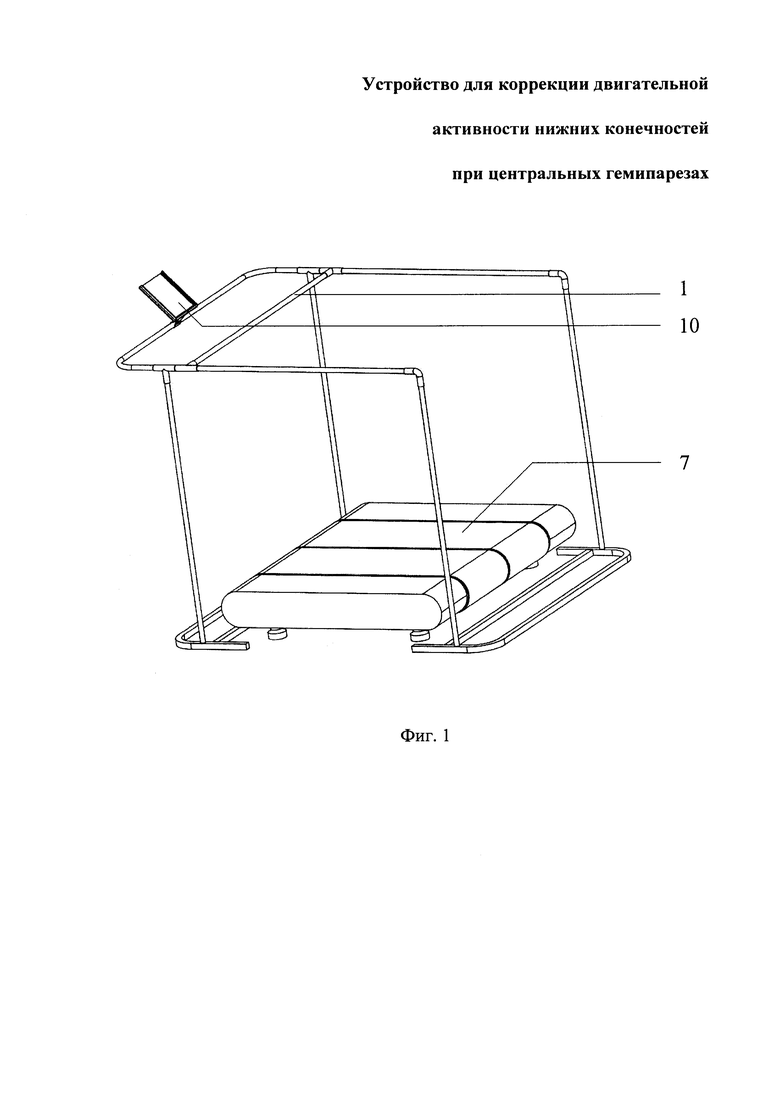
на фиг. 1 изображен общий вид устройства;
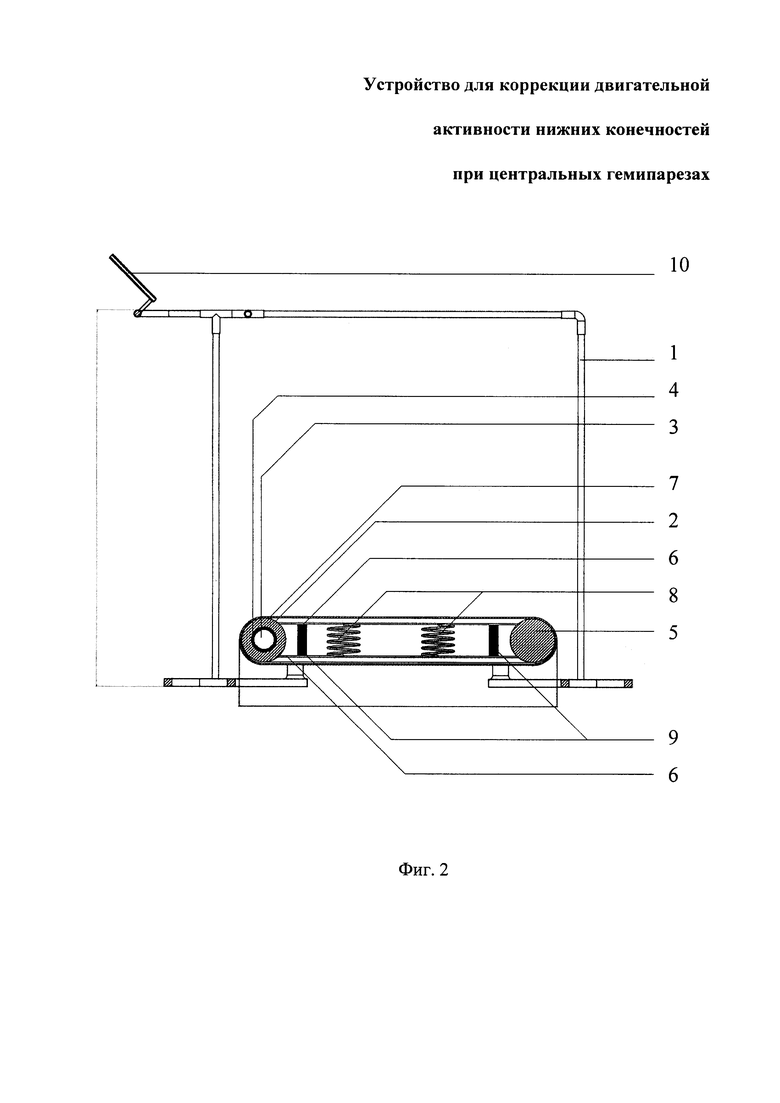
на фиг. 2 - вид устройства сбоку.
Устройство состоит из стальной рамы (1), в которой закреплены два передних вращающихся вала (2), на оси которых неподвижно закреплена электрическая тормозная система (3) и датчики Холла (4), два задних свободновращающихся вала (5), четыре цельнолистовых опорных полотна (6), лежащие под раздельным шаговым полотном (7). Под каждой парой стальных цельнолистовых опорных полотен (6) располагаются четыре пружинных амортизатора (8) и четыре тензометрических датчика (9) (например, консольные тензорезисторные датчики К-О-14А, ПО «Ветор-ПМ», РФ, г. Пермь). Удерживающая привязь (например, Vento «Профи поясная», группа компаний Vento, РФ, г. Москва) для фиксации пациента во время сеанса, карабины и фурнитура закреплены к стальной раме (1). Датчики Холла (4), тензометрические датчики (9) адаптированы при помощи авторского программного обеспечения с персональным компьютером, имеющим устройство графического вывода, закрепленное на раме (1) с помощью фиксатора (10). Устройство выполнено из стали, например среднелегированная хромоникелевая конструкционная сталь 38Х2Н5МА.
Устройство используют следующим образом. Стопы пациента помещают на раздельные шаговые полотна (7), правую стопу - на правое полотно, левую стопу - на левое полотно соответственно, туловище пациента фиксируют удерживающей привязью к стальной раме (1) с обеих сторон.
На первом сеансе проводят диагностическое исследование: пациенту предлагают выполнить шаговую ходьбу в удобном для него темпе в течение 10 минут. На первом и на всех последующих сеансах инструктируют пациента о начале ходьбы с любой ноги по его желанию, предупреждая о завершении ходьбы противоположной ногой и о необходимости минимальной опоры тела на верхние конечности.
Рассчитывают количество пройденных шагов n для каждой ноги (nS и nD) соответственно, при этом nS и nD равны количеству одновременного срабатывания тензометрических датчиков (9) под каждой из сторон разделенного шагового полотна (7).
Рассчитывают коэффициент асимметрии пройденного расстояния (KAS), представляя в виде обыкновенной дроби:
KAS=SS/SD,
где SS - расстояние, пройденное левой ногой (м), фиксируют при помощи датчика Холла (4) левого переднего вала (2);
SD - расстояние, пройденное правой ногой (м), фиксируют при помощи датчика Холла (4) правого переднего вала (2).
В случае nS>nD производят коррекцию KAS по формуле как
KAS=KASкор=(SS-mS)/SD,
где КАSкор - скорректированный KAS,
mS - избыточное расстояние, пройденное левой ногой (м), рассчитанное по формуле
mS=SS/(nS-nD) (м).
Аналогично рассчитывают КАSкор. при nS<nD:
KAS=KASкор=SS/(SD-mD),
где KASкор - скорректированный KAS,
mD - избыточное расстояние, пройденное правой ногой (м), рассчитанное по формуле
mD=SD/(nD-nS) (м).
Для удобства производят преобразование
КА=КАS*100%,
где КА - коэффициент асимметрии (%).
Таким образом, при локомоторном дефиците правой нижней конечности КА>100%, при локомоторном дефиците левой нижней конечности КА<100%.
Для коррекции центральных гемипарезов в позднем восстановительном периоде инсульта, при детском церебральном параличе легкой и средней степени тяжести проводят 10 и более сеансов продолжительностью 30 минут с использованием принципа биологической обратной связи по следующему алгоритму.
На втором и последующих сеансах коррекции пациенту предлагают выполнить шаговую ходьбу в удобном для него темпе с динамической визуализацией величины асимметрии пройденного расстояния. При этом перед пациентом ставят задачу удерживать одинаковую высоту столбиков диаграмм, представленных на устройстве графического вывода персонального компьютера и отражающих асимметрию пройденного расстояния.
Значение величины сопротивления вращения передних валов (2) при помощи электрических тормозных систем (3) на первом сеансе коррекции выставляют исходя из величины коэффициента асимметрии (КА) по формуле
ВС=КА-100 (%),
где ВС - величина сопротивления электрической тормозной системы (3) одного из передних валов (2), при ВС>0 - левого переднего вала, при ВС<0 - правого переднего вала. При этом величину сопротивления передних валов (2) при их вращении без сопротивления электрической тормозной системы (3) необходимо считать равной 0%, абсолютную остановку вращения валов при помощи электрической тормозной системы (3) необходимо считать равной 100%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе | 2019 |
|
RU2734406C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
| СПОСОБ КОРРЕКЦИИ НАРУШЕНИЙ ПОЗЫ И ХОДЬБЫ ПРИ ДЦП | 2013 |
|
RU2539401C1 |
| Способ определения тяжести эквинусной деформации стоп у детей с детским церебральным параличом | 2018 |
|
RU2712951C2 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| СПОСОБ КОРРЕКЦИИ СОСТОЯНИЯ ЧЕЛОВЕКА С НАРУШЕНИЯМИ ФУНКЦИЙ, ВЫЗВАННЫХ РАССТРОЙСТВОМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2004 |
|
RU2260416C1 |
| СПОСОБ КОРРЕКЦИИ ХОДЬБЫ С ПРЕВРАЩЕНИЕМ ПАРЕТИЧНОЙ НОГИ В ВЕДУЩУЮ | 2014 |
|
RU2548514C1 |
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2126276C1 |
Изобретение относится к области медицинской техники, а именно к восстановительной медицине и реабилитации. Устройство для коррекции двигательной активности нижних конечностей при центральных гемипарезах содержит раздельное шаговое полотно, закрепленное на стальной опорной раме. Раздельное шаговое полотно закреплено на опорной раме с помощью двух передних вращающихся и двух задних свободновращающихся валов и лежит на двух парах верхних и нижних опорных полотен, между каждой парой которых неподвижно закреплены по четыре пружинных амортизатора и по четыре тензометрических датчика, на оси передних вращающихся валов расположены датчики Холла и электрическая тормозная система, связанные с компьютером. Изобретение обеспечивает повышение эффективности способа коррекции двигательной активности нижних конечностей у пациентов с параличами путем не только адаптации, но и реабилитации центрального гемипареза. 2 ил.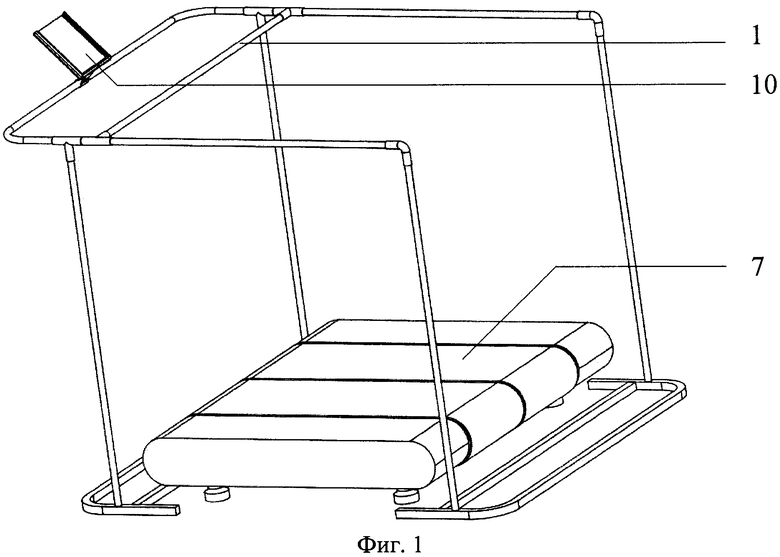
Устройство для коррекции двигательной активности нижних конечностей при центральных гемипарезах, содержащее раздельное шаговое полотно, закрепленное на стальной опорной раме, отличающееся тем, что раздельное шаговое полотно закреплено на опорной раме с помощью двух передних вращающихся и двух задних свободновращающихся валов и лежит на двух парах верхних и нижних опорных полотен, между каждой парой которых неподвижно закреплены по четыре пружинных амортизатора и по четыре тензометрических датчика, а на оси передних вращающихся валов расположены датчики Холла и электрическая тормозная система, связанные с компьютером.
| US 8308618 B2, 13.11.2012 | |||
| Лечебно-тренировочная барокамера | 1945 |
|
SU65770A1 |
| ШАРОВАЯ МЕЛЬНИЦА | 1997 |
|
RU2152825C2 |

