Область техники, к которой относится изобретение
Изобретение относится к способу и устройству, которые могут предоставлять указание местоположения пользователя устройства, и, в частности, относятся к способу и устройству, которые могут обнаруживать движение пользователя в лифте и, таким образом, предоставлять указание поднятия пользователя.
Уровень техники
Спутниковые системы позиционирования, такие как GPS, предоставляют указание местоположения пользователя с помощью сигналов, принятых от множества спутников. Хотя системы такого типа работают хорошо в окружениях вне помещений, они работают не очень хорошо или вовсе не работают в окружениях внутри помещений, поскольку может быть затруднительным принимать сигналы от спутников.
Поэтому были осуществлены попытки предоставлять системы отслеживания и навигации внутри помещений. Некоторые системы используют системы обнаружения движения (например, требующие, чтобы инфраструктура была установлена в окружении в помещении и/или посредством использования носимого пользователем устройства, которое содержит датчики движения), которые могут необязательно использовать карты окружения в помещении или другую контекстную информацию.
В этих носимых пользователем устройствах могут использоваться акселерометры, которые измеряют ускорение, включающее в себя гравитационные поля, которому они подвергаются. Трехосевые (3D) акселерометры имеют эту возможность независимо от их собственной ориентации и могут предоставлять относительное направление ускорения вместе с величиной ускорения. Это делает их полезными для широкого множества связанных с движением прикладных задач.
Одним важным аспектом систем отслеживания и навигации внутри помещений является определение того, на каком этаже здания находится пользователь. Однако в настоящее время не существует надежных решений для определения этажа, на котором находится пользователь, на основе измерений акселерометра.
Поэтому существует необходимость в улучшенном способе и устройстве для обнаружения движения пользователя в лифте и для определения поднятия пользователя из этого движения, например в терминах этажа или уровня здания, на котором находится пользователь.
Раскрытие изобретения
Было обнаружено, что лифты различных типов проявляют очень типичные характеры движения, которые могут наблюдаться с помощью только акселерометра. Типичная поездка в лифте начинается с ускорения вверх или вниз из статического положения (то есть нулевого ускорения, кроме силы тяжести), за которым следует (обычно) равномерное движение вверх или вниз и затем замедление до тех пор, пока лифт не вернется в статическое положение. Интервал перемещения вверх или вниз лифта относится к сумме ускорения, равномерного движения и замедления. Кроме того, направление перемещения лифта (то есть либо вверх, либо вниз) может быть обнаружено акселерометром, поскольку ускорение лифта будет либо добавляться, либо вычитаться из гравиметрического сигнала (который всегда существует в направлении вверх).
Поэтому согласно первому аспекту изобретения предоставляется способ для обнаружения движения пользователя или объекта в лифте, способ содержит измерение ускорения, испытываемого пользователем или объектом, чтобы получать последовательности измерений ускорения; обработку последовательностей измерений ускорения, чтобы идентифицировать пик и впадину в них, которые ассоциируются с началом и окончанием движения лифта; идентификацию сегмента измерений ускорения, соответствующих движению лифта, из идентифицированных пика и впадины; и определение указания изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения.
В некоторых вариантах осуществления способ дополнительно содержит этапы определения сигнала уровня шума из последовательностей измерений ускорения, сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и сравнения сигнала уровня шума с пороговым значением шума; и этап обработки измерений ускорения содержит обработку только тех измерений ускорения, где соответствующая часть сигнала уровня шума меньше порогового значения шума.
В других вариантах осуществления этап обработки содержит сравнение амплитуды каждого измерения ускорения с пороговым значением пика и пороговым значением впадины, пороговое значение пика находится выше, чем пороговое значение впадины; идентификацию возможного пика в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых превышают пороговое значение пика, и идентификацию возможной впадины в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых ниже порогового значения впадины.
В этих вариантах осуществления этап обработки предпочтительно дополнительно содержит отбрасывание любого идентифицированного возможного пика или любой идентифицированной возможной впадины, когда продолжительность соответствующей группы измерений ускорения меньше минимального порогового значения времени.
В дополнительных вариантах осуществления способ дополнительно содержит этапы определения сигнала уровня шума из последовательностей измерений ускорения, сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и сравнения сигнала уровня шума с пороговым значением шума; и при этом этап обработки измерений ускорения дополнительно содержит отбрасывание любого идентифицированного возможного пика и идентифицированной возможной впадины, когда соответствующая часть сигнала уровня шума превышает пороговое значение шума.
В еще дополнительных вариантах осуществления этап обработки дополнительно содержит оценку возможных пиков и возможных впадин, чтобы идентифицировать движение лифта, при этом движение лифта идентифицируется посредством возможного пика, за которым следует возможная впадина, или посредством возможной впадины, за которой следует возможный пик.
Альтернативно этап обработки дополнительно содержит оценку возможных пиков и возможных впадин, чтобы идентифицировать движение лифта, при этом движение лифта идентифицируется как возможный пик, за которым следует возможная впадина в предварительно определенном периоде времени, или как возможная впадина, за которой следует возможный пик в предварительно определенном периоде времени.
В некоторых вариантах осуществления этап идентификации сегмента измерений ускорения, соответствующих движению лифта, из идентифицированного пика и впадины содержит определение времени начала движения лифта посредством исследования измерений ускорения перед самым ранним из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным, и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести; и определение времени окончания движения лифта посредством исследования измерений ускорения после самого последнего из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести.
В некоторых вариантах осуществления этап определения указания изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения содержит двойное интегрирование измерений ускорения между временем начала и временем окончания движения лифта.
В дополнительных вариантах осуществления этап обработки дополнительно содержит применение фильтра к полученным измерениям ускорения, чтобы подавлять высокочастотный шум в измерениях до идентификации пиков и впадин.
В некоторых вариантах осуществления способ дополнительно содержит этап использования указания изменения в поднятии пользователя или объекта во время движения лифта, чтобы обновлять ранее определенное значение для высоты пользователя или объекта относительно уровня моря, ранее определенное значение для высоты пользователя или объекта относительно земли или ранее определенное значение для этажа здания или другой структуры, в которой пользователь или объект находится.
Согласно второму аспекту изобретения предоставляется компьютерный программный продукт, содержащий машиночитаемый код, осуществленный в нем, машиночитаемый код конфигурируется так, что, при исполнении посредством подходящего компьютера или процессора, компьютер или процессор выполняет способ, который описан выше.
Согласно третьему аспекту изобретения предоставляется устройство для обнаружения движения пользователя или объекта в лифте, устройство содержит процессор, который конфигурируется, чтобы принимать измерения ускорения, испытываемого пользователем или объектом, обрабатывать измерения ускорения, чтобы идентифицировать пик и впадину в них, которые ассоциируются с началом и окончанием движения лифта, идентифицировать сегмент измерений ускорения, соответствующих движению лифта, из идентифицированного пика и впадины, и определять указание изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения.
В некоторых вариантах осуществления процессор дополнительно конфигурируется, чтобы определять сигнал уровня шума из измерений ускорения, сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и сравнивать сигнал уровня шума с пороговым значением; и при этом процессор конфигурируется, чтобы идентифицировать пик и впадину в измерениях ускорения посредством обработки только тех измерений ускорения, где соответствующая часть сигнала уровня шума меньше порогового шума.
В других вариантах осуществления процессор конфигурируется, чтобы идентифицировать пик и впадину в измерениях ускорения посредством сравнения амплитуды каждого измерения ускорения с пороговым значением пика и пороговым значением впадины, пороговый пик находится выше порогового значения впадины; и идентифицировать возможный пик в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых превышают пороговое значение пика, и идентифицировать возможную впадину в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых ниже порогового значения впадины.
В таких вариантах осуществления процессор дополнительно конфигурируется, чтобы идентифицировать пик и впадину в измерениях ускорения посредством отбрасывания любого идентифицированного возможного пика или идентифицированной возможной впадины, где продолжительность соответствующей группы измерений ускорения меньше минимального порогового значения времени.
В дополнительных вариантах осуществления процессор дополнительно конфигурируется, чтобы определять сигнал уровня шума из измерений ускорения, сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и сравнивать сигнал уровня шума с пороговым значением шума; и при этом процессор конфигурируется, чтобы идентифицировать пик и впадину в измерениях ускорения посредством отбрасывания любого идентифицированного возможного пика и идентифицированной возможной впадины, где соответствующая часть сигнала уровня шума превышает пороговое значение шума.
В еще дополнительных вариантах осуществления процессор дополнительно конфигурируется, чтобы оценивать возможные пики и возможные впадины, чтобы идентифицировать движение лифта, при этом движение лифта идентифицируется посредством возможного пика, за которым следует возможная впадина, или посредством возможной впадины, за которой следует возможный пик.
В других вариантах осуществления процессор дополнительно конфигурируется, чтобы оценивать возможные пики и возможные впадины, чтобы идентифицировать движение лифта, при этом движение лифта идентифицируется как возможный пик, за которым следует возможная впадина в предварительно определенном периоде времени, или как возможная впадина, за которой следует возможный пик в предварительно определенном периоде времени.
В некоторых вариантах осуществления процессор конфигурируется, чтобы идентифицировать сегмент измерений ускорения, соответствующих движению лифта, из идентифицированного пика и впадины посредством определения времени начала движения лифта посредством исследования измерений ускорения перед самым ранним из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести; и определения времени окончания движения лифта посредством исследования измерений ускорения после самого последнего из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести.
В некоторых вариантах осуществления процессор конфигурируется, чтобы определять указание изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения посредством двойного интегрирования измерений ускорения между временем начала и временем окончания движения лифта.
В некоторых вариантах осуществления процессор дополнительно конфигурируется, чтобы применять фильтр к полученным измерениям ускорения, чтобы подавлять высокочастотный шум в измерениях до идентификации пиков и впадин.
В некоторых вариантах осуществления процессор дополнительно конфигурируется, чтобы использовать указание изменения в поднятии пользователя или объекта во время движения лифта, чтобы обновлять ранее определенное значение для высоты пользователя или объекта относительно уровня моря, ранее определенное значение для высоты пользователя или объекта относительно земли или ранее определенное значение для этажа здания или другой структуры, на котором пользователь или объект находится.
В еще дополнительных вариантах осуществления устройство дополнительно содержит акселерометр, который конфигурируется, чтобы прикрепляться к пользователю или объекту.
Краткое описание чертежей
Варианты осуществления изобретения будут сейчас описаны, только в качестве примера, со ссылкой на и как показанные в сопровождающих чертежах, на которых:
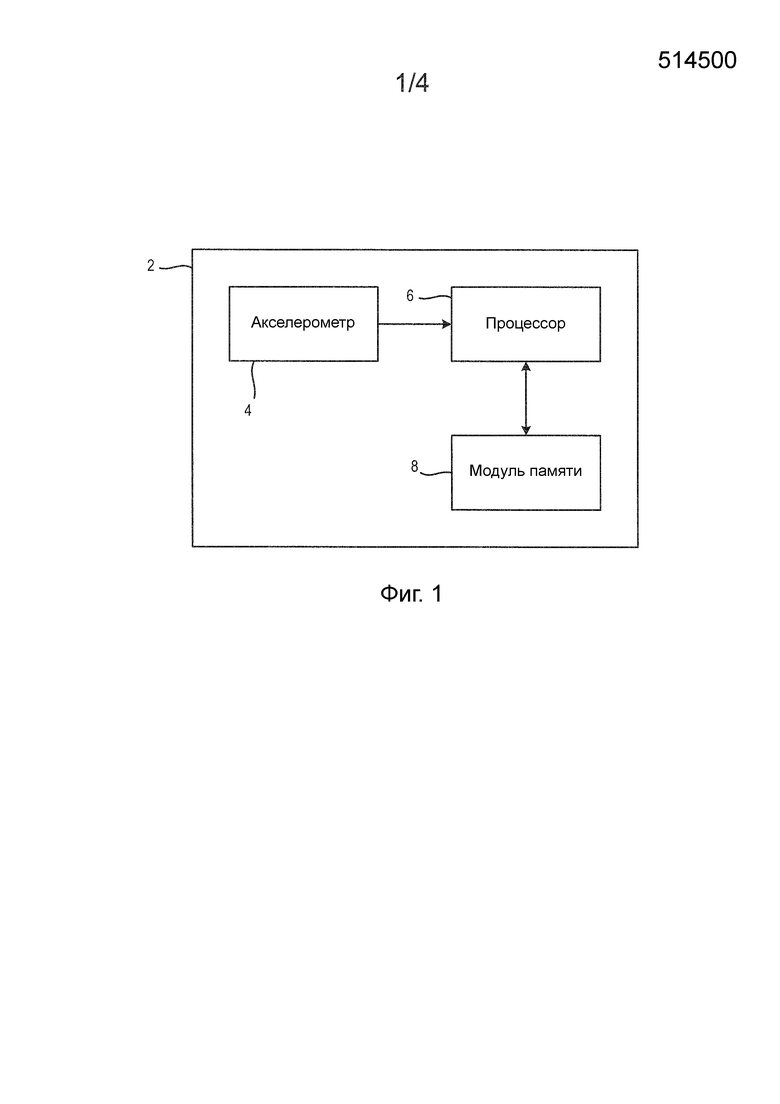
фиг. 1 - это блок-схема устройства согласно варианту осуществления изобретения;
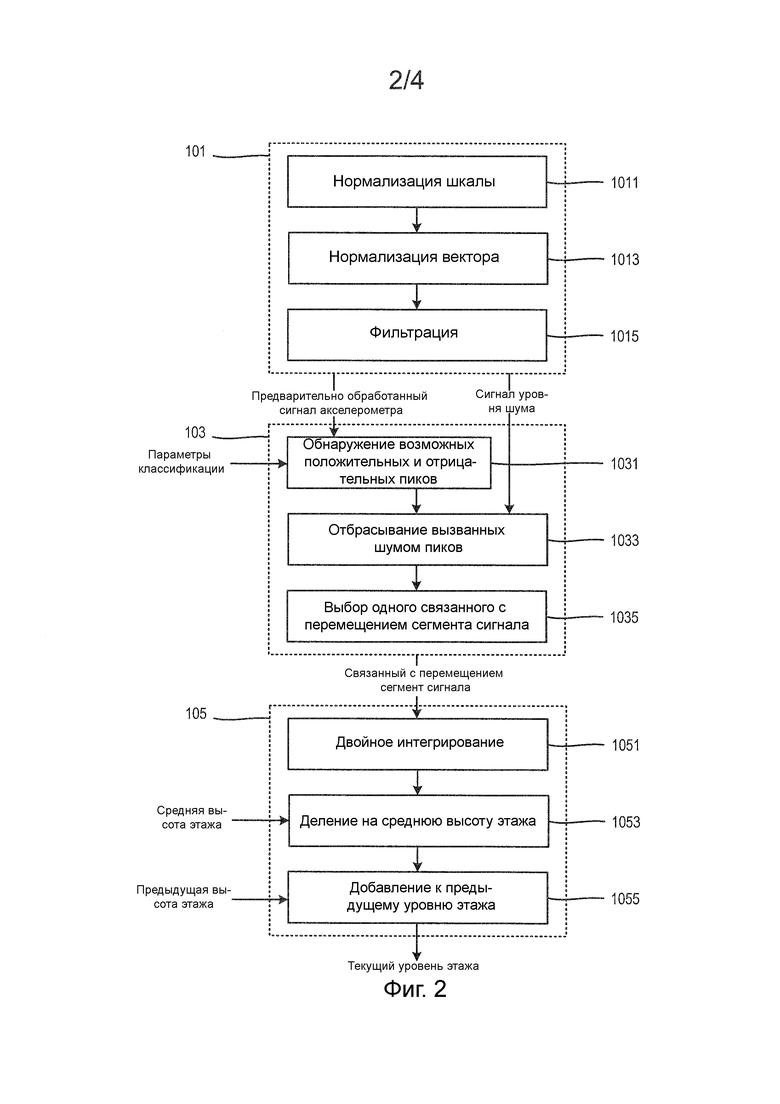
фиг. 2 - это блок-схема последовательности операций, иллюстрирующая способ обработки сигнала акселерометра согласно варианту осуществления изобретения;
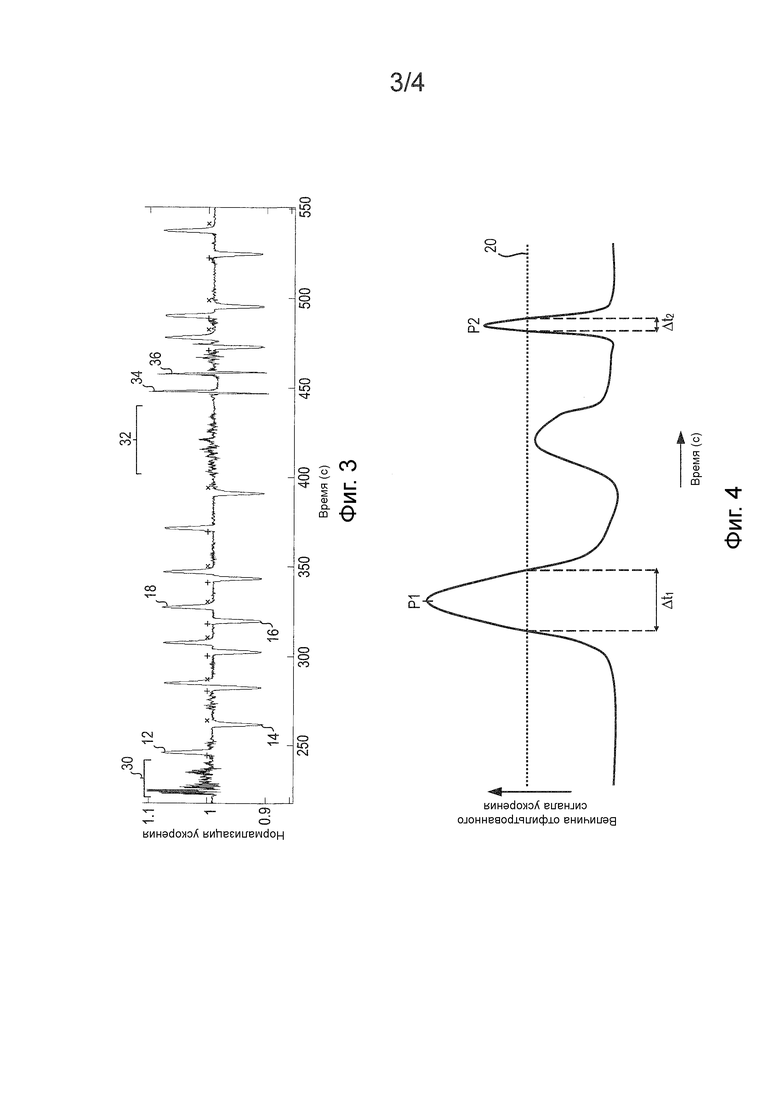
фиг. 3 - это график, показывающий примерный сигнал от акселерометра с указаниями перемещений лифта, обнаруженных согласно способу на фиг. 2;
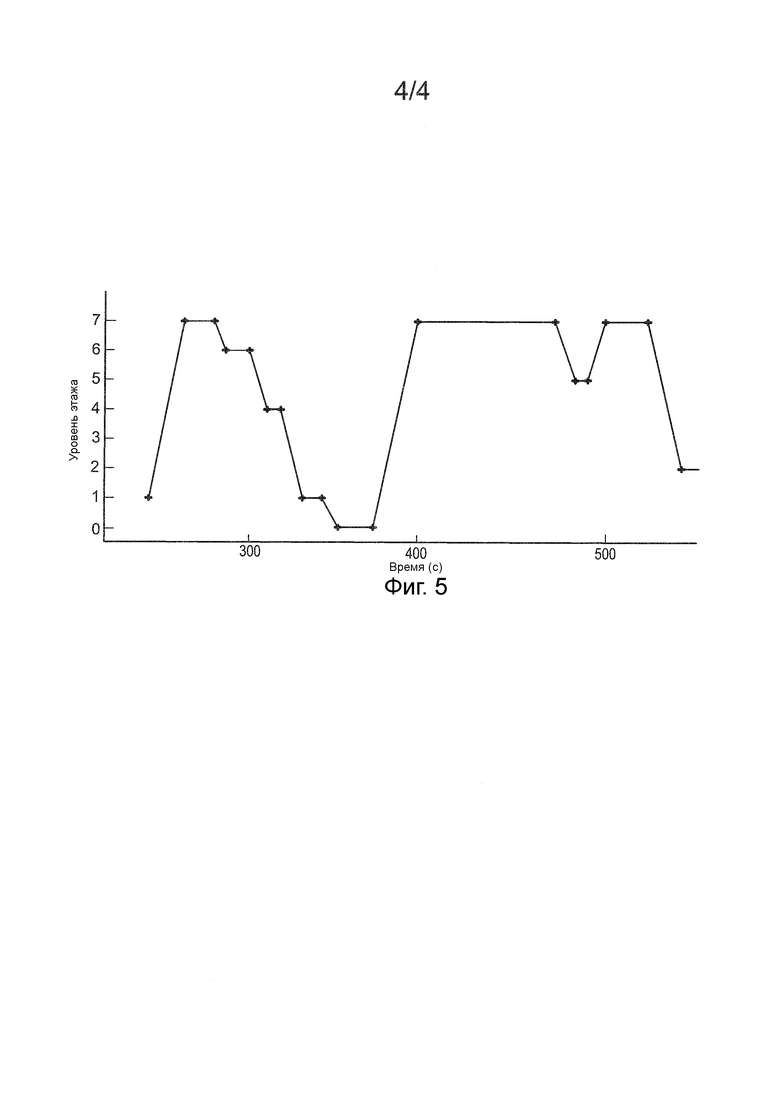
фиг. 4 - это график, показывающий другой примерный сигнал от акселерометра; и
фиг. 5 - это график, иллюстрирующий уровень этажа пользователя, оцененный из сигнала акселерометра, показанного на фиг. 3.
Осуществление изобретения
Фиг. 1 показывает устройство 2 согласно варианту осуществления изобретения. Устройство 2 содержит акселерометр 4, который измеряет характерные ускорения, испытываемые устройством 2 (то есть характерные в том смысле, что они включают в себя действия силы тяжести), и который выводит сигнал, представляющий измеренное ускорение, процессору 6. Процессор 6 обрабатывает сигнал от акселерометра 4, чтобы обнаруживать характеристику движения лифта и предоставлять указание поднятия устройства 2 из обнаруженных движений. Устройство 2 дополнительно содержит модуль 8 памяти, который может сохранять, например, сигнал от акселерометра 4, параметры для использования в обработке, выполняемой процессором 6, программный код для извлечения и выполнения посредством процессора 6 и результаты обработки процессором 6.
Указание поднятия, определенное процессором 6, может быть предоставлено во множестве различных форм. В частности, указание поднятия устройства 2 может указывать высоту устройства 2 относительно земли, высоту устройства 2 относительно уровня моря (более широко называемую альтитудой) и/или высоту устройства 2 относительно ранее определенного поднятия. Предпочтительно, однако, указание поднятия устройства 2 указывает этаж или уровень здания, на котором находится устройство 2 (например, первый этаж, второй этаж и т.д.).
Акселерометр 4 предпочтительно является трехосевым акселерометром, который предоставляет измерения ускорения в трех измерениях. В этом случае сигнал, выводимый акселерометром 4 процессору 6, может содержать соответствующий сигнал для каждой из оси измерения акселерометра 4. В некоторых вариантах осуществления акселерометр 4 является акселерометром с микроэлектромеханической системой (MEMS), хотя будет понятно, что могут быть использованы другие типы акселерометра 4. Акселерометр 4 может типично работать с частотой дискретизации в 30 Гц или 50 Гц, хотя будет понятно, что могут быть использованы другие частоты дискретизации.
Хотя не проиллюстрировано на фиг. 1, устройство 2 может включать в себя некоторое средство для сообщения указания поднятия, определенного процессором 6, пользователю или заинтересованной третьей стороне. Это средство может включать в себя дисплей для иллюстрации поднятия пользователя, динамик для представления результатов обработки в звуковой форме и/или схему передатчика или приемопередатчика для беспроводной передачи результатов обработки удаленному устройству или серверу.
Примерные этапы в обработке, выполняемой процессором 6, чтобы определять указание поднятия, показаны на фиг. 2. Обработка может, как правило, быть разделена на три фазы: этап 101 предварительной обработки, на котором шум устраняется из сигнала акселерометра, этап 103 обнаружения и классификации пиков, на котором обнаруживаются пики, соответствующие движению лифта, и этап 105 вычисления поднятия, на котором указание поднятия определяется из обнаруженных пиков. В последующем предполагается, что сигнал ускорения, выводимый акселерометром 4, всегда представляет ускорение, по существу, в вертикальном направлении. Это предположение поддерживается достаточно хорошо для большинства обычных ситуаций движения, в которых пользователь находится.
На этапе 101 предварительной обработки сигнал от акселерометра 4 подвергается предварительной обработке для того, чтобы устранять или, по меньшей мере, уменьшать высокочастотный шум из измерений ускорения.
Сигнал, выводимый из акселерометра 4, может иметь шкалу, отличную от необходимой на последующих этапах обработки (например, этапе 1051 интегрирования). Например, шкала может быть в единицах некоторого аналого-цифрового преобразователя. Поэтому на этапе 1011 шкала нормализуется. Чтобы нормализовать шкалу (предпочтительно в единицах м/с2), исходные значения сигнала акселерометра делятся на константу, значение которой зависит от подразумеваемых шкал «до» и «после». Кроме того, этот этап может требовать вычитания или добавления константы для того, чтобы нормализовать нулевой уровень сигнала. Методы реализации этой нормализации шкалы известны специалистам в области техники.
Следует отметить, что шкала амплитуд, используемая на фиг. 3 (обсуждается дополнительно ниже), использует (приблизительно) силу тяжести, то есть 9,81 м/с2, в качестве единицы измерения, но для двойного интегрирования на этапе 1051, чтобы получать в результате значение с единицами в метрах, сигнал ускорения необходимо представлять в единицах (1) м/с2.
После нормализации шкалы сигнал акселерометра с нормализованной шкалой нормализуется, чтобы вычислять длину вектора (этап 1013). Длина S вектора может быть вычислена с помощью уравнения
S=√(X2+Y2+Z2),
где X, Y и Z являются компонентами ускорения по x-, y- и z-осям акселерометра 4 в конкретный момент выборки.
После того как длина (величина) вектора ускорения в каждый момент выборки была определена на этапе 1013, фильтр применяется к временным последовательностям длин вектора ускорения, чтобы устранять или уменьшать шум, в частности высокочастотный шум (этап 1015). Применяемый фильтр предпочтительно является 1-секундным сглаживающим фильтром, хотя специалисты в области техники знают и другие подходящие типы фильтра, который может быть использован, чтобы устранять компоненты высокочастотного шума. Высокочастотный шум может содержать частоты выше приблизительно 5 Гц, хотя могут быть использованы другие пороговые частоты.
В дополнение к выводу отфильтрованного сигнала ускорения этап 1015 также предпочтительно выводит сигнал, указывающий уровень высокочастотного шума, поскольку этот сигнал может быть использован на этапе 103 обнаружения и классификации пика, чтобы отбрасывать связанные с шумом пики.
Сигнал уровня шума может быть получен посредством первого вычитания отфильтрованного сигнала ускорения из сигнала продолжительности ускорения, выведенного посредством этапа 1013, чтобы получать сигнал шума. Затем сигнал уровня шума может быть получен посредством либо (i) выпрямления сигнала шума (то есть взятия абсолютных значений) и затем выполнения низкочастотной фильтрации, либо (ii) выпрямления сигнала шума и для каждой выборки в сигнале шума взятия суммы окружающих выборок, либо (iii) для каждой выборки в сигнале шума, вычисляя расхождение в группе окружающих выборок.
Низкочастотная фильтрация в варианте (i) может быть выполнена с помощью того же или аналогичного фильтра, что и используемый для устранения высокочастотного шума из сигнала продолжительности ускорения, выведенного посредством этапа 1013 (такого как, например, 1-секундный сглаживающий фильтр), хотя специалисты в области техники поймут, что могут быть использованы другие типы фильтра. Для выбора окружающих выборок в вариантах (ii) и (iii) подходящим является размер окна в 1 секунду. Кроме того, вместо расхождения могут быть использованы другие меры разброса типа среднеквадратичного отклонения или интерквартильного размаха. Кроме того, в принципе, любая операция, которая дает в результате меру «энергии» сигнала, может быть использована, чтобы определять сигнал уровня шума.
После предварительной обработки пики и впадины в отфильтрованном сигнале акселерометра, которые ассоциируются с движением лифта, обнаруживаются и классифицируются на этапе 103. Как может быть видно на фиг. 3 (которая показывает примерный сигнал от акселерометра 4, который охватывает период времени, в котором устройство 2 испытывает ускорения и замедления в результате нахождения в лифте), ускорения, испытываемые в начале движения лифта, как правило, идентичны замедлениям в конце движения лифта - кроме имеющих противоположное ускорение, но они являются очень индивидуальными признаками в отфильтрованном сигнале ускорения. Эти ускорения и замедления возникают в отфильтрованном сигнале ускорения как пики и впадины (хотя порядок, в котором пик и впадина возникают в сигнале акселерометра, зависит от того, поднимается лифт или опускается).
Например, когда лифт должен подниматься, лифт ускоряется вверх из неподвижного состояния до постоянной скорости. Это ускорение вверх представляется в сигнале на фиг. 3 как «положительный» пик (например, пик 12, и он является «положительным» относительно ускорения, обычно испытываемого устройством 2 вследствие силы тяжести). Когда лифт достигает требуемого этажа, лифт замедляется до тех пор, пока лифт снова не будет в неподвижном состоянии. Это замедление представлено в сигнале на фиг. 3 как впадина или «отрицательный» пик (например, впадина 14, которая является «отрицательной» относительно ускорения, обычно испытываемого устройством 2 вследствие силы тяжести).
Аналогично, когда лифт должен опускаться, лифт ускоряется вниз из неподвижного состояния до своей предварительно заданной скорости. Это ускорение вниз представлено в сигнале на фиг. 3 как впадина или «отрицательный» пик (например, впадина 16, поскольку чистое ускорение, действующее на устройство 2, меньше, чем ускорение, обычно испытываемое устройством 2 вследствие силы тяжести). Когда лифт достигает требуемого этажа, лифт замедляется до тех пор, пока лифт снова не будет в неподвижном состоянии. Это замедление представлено в сигнале на фиг. 3 как пик или «положительный» пик (например, пик 18).
Следовательно, обнаружение и классификация пика выполняется на этапе 103, чтобы обнаруживать эти последовательные ускорения и замедления. В частности, обнаружение и классификация пика помогает обнаруживать последовательные пики и впадины, которые представляют движение лифта, при этом пик, за которым следует впадина, представляет подъем, а впадина, за которой следует пик, представляет спуск. Этап 103 может выполнять это с помощью множества признаков, типично ассоциированных с движением лифта, включающих в себя продолжительность и амплитуду.
На первом этапе обнаружения и классификации пиков, этапе 1031, отфильтрованный сигнал акселерометра анализируется, чтобы обнаруживать возможные пики и впадины.
В предпочтительном варианте осуществления обнаружение возможных положительных пиков выполняется следующим образом. Сначала отфильтрованный сигнал акселерометра сканируется на предмет выборок, амплитуды которых превышают пороговое значение амплитуды. Пороговое значение амплитуды для обнаружения возможных положительных пиков будет установлено в значение, которое выше, чем ускорение вследствие силы тяжести (то есть, обращаясь к фиг. 3, пороговое значение амплитуды положительного пика будет установлено в некоторое значение больше 1, поскольку сигнал акселерометра был нормализован до g-единиц, то есть единиц силы тяжести). Примерное значение для порогового значения амплитуды положительного пика должно устанавливать пороговое значение примерно на 1% или 2% выше, чем амплитуда силы тяжести, хотя будет понятно, что могут быть использованы другие значения.
Период времени, охваченный каждой группой последовательных выборок, величины которых выше порогового значения амплитуды, сравнивается с минимальным периодом времени. Примерные значения для минимального периода времени могут включать в себя 0,5 с, 1 с или 1,5 с, хотя будет понятно, что могут быть использованы другие значения. Возможный положительный пик идентифицируется как любая группа последовательных выборок, величины которых выше порогового значения амплитуды, и которая охватывает период времени больший, чем минимальный период времени. Выборка с наибольшей амплитудой в этом возможном пике помечается как центральное время пика. Использование минимального периода времени предоставляет возможность, например, исключать импульсы (которые возникают как относительно остроконечные пики в сигнале акселерометра) из последующих этапов обработки.
Хотя примерные значения были предоставлены для порогового значения амплитуды и минимального периода времени, будет понятно, что значения для этих двух параметров должны, как правило, задаваться в комбинации. Таким образом, когда используется более низкое пороговое значение амплитуды, может быть выбран более длительный период времени, и наоборот. Также будет понятно, что оптимальные значения для порогового значения амплитуды и минимального периода времени будут зависеть от конкретного типа лифта, в котором находится пользователь. Оптимальные значения для различных типов лифта могут быть предварительно определены и сохранены в базе данных для использования устройством 2, когда устройство 2 находится в здании, которое содержит известный тип лифта (например, когда здание определяется на основе последнего доступного измерения спутниковой системы позиционирования).
Хотя не обязательно, возможно применять максимальный период времени, чтобы идентифицировать возможные положительные пики, что означает, что любой пик, который имеет продолжительность больше, чем максимальный период времени, будет исключен из последующих этапов обработки. Однако будет понятно, что «пики большой продолжительности» вряд ли должны появляться в сигнале акселерометра. Тем не менее, примерное значение для максимального периода времени равно 10 с, хотя будет понятно, что могут быть использованы другие значения.
Результат этой обработки иллюстрируется на фиг. 4, которая показывает примерный отфильтрованный сигнал акселерометра. Пороговое значение амплитуды указывается пунктирной линией 20, и может быть видно, что существуют два набора последовательных выборок в фильтрованном сигнале акселерометра, амплитуды которых превышают пороговое значение 20 амплитуды. Эти возможные положительные пики обозначаются как P1 и P2. Период времени, охваченный первым идентифицированным пиком, P1, обозначается как Δt1, а период времени, охваченный вторым идентифицированным пиком, P2, обозначается как Δt2. В этом примере только период времени, охваченный первым пиком, P1, превышает минимальный период времени, и поэтому первый пик считается положительным пиком, то есть кандидатом на то, что он вызван движением лифта. Однако второй пик, P2, имеет недостаточную продолжительность (то есть Δt2 меньше минимального периода времени) и, следовательно, не рассматривается как соответствующий движению лифта и отбрасывается (то есть не рассматривается на последующих этапах обработки). Также следует отметить, что существует другой возможный «пик» между P1 и P2, но этот пик имеет недостаточную мощность (то есть он не превышает порогового значения амплитуды) и не обнаруживается как возможный положительный пик на этом этапе.
Будет понятно, что вышеописанное обнаружение пика может выполняться, по существу, в реальном времени по отфильтрованному сигналу акселерометра, в таком случае сигнал может сканироваться, и как только идентифицируется выборка, амплитуда которой превышает пороговое значение амплитуды, запускается таймер. Сканирование сигнала продолжается и таймер работает до тех пор, пока не будет обнаружена выборка, которая имеет значение амплитуды ниже порогового значения амплитуды. Время, которое прошло между «превышениями порогов», затем сравнивается с минимальным периодом времени для продолжительности пика. Если разница времени достаточно большая (то есть прошедшее время превышает минимальный период времени), возможный пик обнаруживается, и выборка с наибольшим значением в этом временном диапазоне помечается как центральное время пика.
Следует отметить, что возможные впадины (отрицательные пики) в сигнале акселерометра могут быть обнаружены аналогичным образом посредством использования порогового значения амплитуды отрицательного пика/впадины, которое устанавливается ниже значения ускорения вследствие силы тяжести (например, на 1% или 2% ниже значения для ускорения вследствие силы тяжести), и идентификации возможных отрицательных пиков/впадин как тех групп последовательных выборок, амплитуды которых ниже этого порогового значения и которые охватывают период времени больший, чем минимальный период времени. Обнаружение возможных пиков и впадин предпочтительно выполняется параллельно.
На следующем этапе обнаружения и классификации пиков, этапе 1033, возможные пики и впадины, идентифицированные на этапе 1031, оцениваются, чтобы определять, есть ли какой-либо результат от шума в сигнале акселерометра. Любой возможный пик или впадина, определенный как результат шума в сигнале акселерометра, отбрасывается и не рассматривается на последующих этапах обработки. В частности, этап 1033 получает выходные данные этапа 1031 и использует сигнал уровня шума с этапа фильтрации (этапа 1015), чтобы определять, какие, если есть, из обнаруженных пиков и впадин были привнесены в сигнал высокочастотным шумом.
Поскольку этап 1015 фильтрации является, в своей основе, операцией скользящего среднего, высокочастотный шум может быть устранен, обеспечивая то, что он не влияет на средний уровень сигнала. Таким образом, этап 1015 фильтрации является обоснованно эффективным, когда компоненты шума имеют короткую продолжительность и низкую амплитуду (таким образом, они имеют ограниченное влияние на среднее значение) и равномерно распространяются в положительные и отрицательные отклонения (таким образом, они взаимно компенсируются). Однако было обнаружено, что продолжительный, высокоэнергетический, высокочастотный шум может действительно привносить низкочастотное искажение в сигнал акселерометра. Такой шум может быть вызван, например, пользователем устройства 2, прыгающим вверх и вниз.
Таким образом, если сигнал уровня шума (то есть представляющий энергию шума), определенный на этапе 1015, является высоким, тогда это может указывать, что шум влияет на сигнал акселерометра даже на низких частотах, и ассоциированный возможный пик или впадина в сигнале может относиться скорее к шуму, чем к ускорениям, которые фактически были вызваны лифтом.
Поэтому на этапе 1033 для каждого из возможных пиков и впадин (предпочтительно для каждой выборки или выборок в обнаруженном пике или впадине) сигнал уровня шума оценивается, чтобы определять, является ли уровень шума высоким для любой из выборок, формирующих этот пик или впадину. Эта оценка может содержать сравнение сигнала уровня шума с пороговым значением, и, если сигнал уровня шума превышает пороговое значение в то же время, в которое пик или впадина обнаруживается на этапе 1031, пик или впадина может быть отброшен как «вызванный шумом». Пороговое значение уровня шума зависит от деталей фильтрации и вычисления сигнала уровня шума (этап 1015). Когда сигнал уровня шума определяется с помощью варианта (i) - выпрямления сигнала шума (то есть взятия абсолютных значений) и затем выполнения низкочастотной фильтрации - пороговое значение уровня шума может быть установлено в 0,8 м/с2, хотя будет понятно, что могут быть использованы другие значения.
После отбрасывания каких-либо вызванных шумом пиков или впадин на этапе 1033 оставшиеся возможные пики и впадины оцениваются, чтобы определять, какие из них соответствуют единичному перемещению лифта (этап 1035). Как указано выше, движение лифта содержит последовательную пару пиков с противоположным знаком (либо отрицательный пик/впадина, за которым следует положительный пик для спуска, либо, наоборот, для подъема).
Чтобы квалифицировать в качестве пригодной пары, верхний лимит устанавливается на разрешенную продолжительность времени между последовательными пиками и впадинами. Верхний лимит может быть задан согласно максимальной ожидаемой продолжительности перемещения лифта. Если последующий положительный/отрицательный пик не обнаруживается в течение максимально разрешенной продолжительности времени после первоначального отрицательного/положительного пика, тогда может быть предположено, что первоначальный пик не был результатом движения лифта. Анализ может затем быть повторен для следующего обнаруженного пика или впадины.
После того как пригодная пара пика и впадины была идентифицирована, определяется продолжительность движения лифта. Это может быть выполнено посредством определения времени начала движения и времени окончания движения (будет понятно, что «время» может быть указано посредством соответствующих выборок в сигнале от акселерометра 4). С помощью центральных времен пиков для пика и впадины время начала может быть определено посредством поиска назад от самого раннего центрального времени пика, а время окончания может быть определено посредством поиска вперед от самого последнего центрального времени пика до любого, либо обоих, из моментов, когда (i) сигнал больше не увеличивается или не уменьшается в амплитуде (какой бы ни применялся) или (ii) сигнал достигает значения, которое достаточно близко (то есть в пределах пороговой величины) к величине ускорения вследствие силы тяжести.
Выходные данные этапа 1035 содержат сегменты отфильтрованного сигнала акселерометра, соответствующие обнаруженным парам положительных и отрицательных пиков, которые определяются посредством определенных времен начала и окончания движения лифта.
Примерный результат обработки на этапе 103 показан на фиг. 3, при этом каждый «+» указывает начало перемещения лифта, а каждый «x» указывает окончание перемещения лифта. Может быть видно, что обработка определила, что несколько частей сигнала акселерометра не являются возможными пиками (обозначены 30, 32, 34 и 36 на фиг. 3). Это может быть обусловлено тем, что сигнал не имел достаточной амплитуды (например, 32), было слишком много шума (например, 30, который получился в результате серии импульсов) или группа выборок, амплитуды которых превысили пороговое значение амплитуды, охватывает недостаточный интервал времени (например, 34 и 36, которые получились в результате наклона пользователя и выпрямления снова).
Сегменты, идентифицированные на этапе 103, передаются этапу 105, на котором определяется перемещение вследствие обнаруженного движения лифта.
Сначала на этапе 1051 двойное интегрирование относительно времени выполняется по каждому сегменту сигнала акселерометра, чтобы определять вертикальное расстояние, пройденное во время этого конкретного движения. Времена начала и окончания сегмента (то есть время начала первого пика/впадины и время окончания второй впадины/пика) предоставляют нижнюю и верхнюю границы для интегрирования соответственно.
Необязательно перед этапом 1051 «плоские» части каждого сегмента сигнала акселерометра могут быть сглажены, чтобы улучшать точность двойного интегрирования. Также возможно выполнять (дополнительный) этап нормирования сигнала между двумя операциями интегрирования.
Затем необязательно определенное вертикальное расстояние может быть преобразовано в измерение числа этажей, пройденных вверх или вниз во время движения, посредством деления определенного вертикального расстояния на среднюю высоту этажа (этап 1053) и округления результата до ближайшего целого. Средняя высота этажа может быть предварительно определена и сохранена в модуле 8 памяти. Примерное значение для средней высоты этажа равно 4 метрам, но будет понятно, что это значение может очень существенно зависеть от здания, типа здания (например, жилого или промышленного), превалирующих строительных норм и т.д. В некоторых вариантах осуществления средние значения высоты этажа для различных типов зданий или структур могут быть сохранены в модуле 8 памяти, и подходящее значение выбирается устройством 2 в зависимости от здания или структуры, в котором находится пользователь (что может быть определено на основе самого последнего измерения, полученного посредством спутниковой системы позиционирования).
На этапе 1055 число этажей, пройденных во время конкретного движения, добавляется (или вычитается, по обстоятельствам) от предыдущего указания уровня этажа пользователя, чтобы получать текущий уровень этажа. Таким образом, например, если предварительно было определено, что пользователь был на третьем этаже, и устройство 2 определяет, что пользователь проехал три этажа в лифте, этап 1055 выведет положение пользователя как находящееся на шестом этаже. Фиг. 5 показывает примерные выходные данные этапа 105 для сигнала акселерометра, показанного на фиг. 3.
В некоторых реализациях изобретения устройство 2 и ассоциированный способ могут быть реализованы в устройстве, таком как мобильный телефон, смартфон или PDA, которое в типичном варианте уже включает в себя акселерометр и требуемый процессор.
Также будет понятно, что устройство 2 может быть реализовано в любой системе, где оно является полезным, чтобы определять поднятие пользователя в здании или другом внутреннем окружении или структуре, такой как система для отслеживания местоположения конкретных пациентов, склонных к блужданию по больнице (в таком случае поднятие, определенное согласно изобретению, может быть передано наблюдающей станции, чтобы предоставлять возможность медсестре или другому работнику здравоохранения находить пациента и вмешиваться, чтобы возвращать пациента в правильное местоположение), или система для обеспечения общего отслеживания местоположения внутри помещения, которая дополняет систему отслеживания местоположения вне помещений, такую как GPS. Кроме того, будет понятно, что устройство 2 может быть использовано, чтобы предоставлять указание поднятия объекта (включающего в себя сам лифт), ассоциированного с устройством 2, вместо пользователя.
В случае, когда устройство 2 используется, чтобы отслеживать пациентов в больнице (и в аналогичных реализациях), устройство 2 может быть приспособлено, чтобы прикрепляться к части тела пользователя, например талии, туловищу, груди, тазу или грудной клетке, и может содержать подходящую структуру (например, пояс или ремень) для прикрепления устройства 2 к части тела.
Наконец, будет понятно, что в некоторых вариантах осуществления акселерометр 4 может быть предусмотрен в отдельном устройстве по отношению к устройству, которое содержит процессор 6. В этом случае акселерометр 4 может быть присоединен к отслеживаемому пользователю или объекту, и выходной сигнал акселерометра 4 может передаваться процессору 6 (с помощью либо проводного, либо беспроводного соединения) для последующей обработки.
Поэтому предоставляется улучшенный способ и устройство для обнаружения движения пользователя в лифте и для определения поднятия пользователя из этого движения, например, в терминах этажа или уровня здания, на котором находится пользователь.
Хотя изобретение подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такое иллюстрирование и описание должны считаться иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Вариации в раскрытых вариантах осуществления могут пониматься и выполняться специалистами в данной области техники при применении на практике заявленного изобретения из изучения чертежей, раскрытия сущности и прилагаемой формулы изобретения. В формуле изобретения слово "содержит" не исключает других элементов или этапов, и перечисление элементов и этапов в единственном числе не исключает их множества. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не могла быть использована с выгодой. Компьютерная программа может быть сохранена/распространяться на подходящем носителе, таком как оптический носитель хранения или твердотельный хранитель, поставляемый вместе или как часть других аппаратных средств, но может также распространяться в других формах, например, через Интернет или другие проводные или беспроводные системы связи. Любые ссылочные символы в формуле изобретения не должны истолковываться как ограничивающие рамки.
Изобретение относится к способу и устройству, которые могут предоставлять указание местоположения пользователя устройства, и, в частности, относятся к способу и устройству, которые могут обнаруживать движение пользователя в лифте и, таким образом, предоставлять указание поднятия пользователя. При осуществлении способа обнаружения движения пользователя или объекта в лифте измеряют ускорение, испытываемое пользователем или объектом, чтобы получить последовательность измерений ускорения. Обрабатывают последовательность измерений ускорения, чтобы идентифицировать пик и впадину в них, которые ассоциируются с началом и окончанием движения лифта. Идентифицируют сегмент измерений ускорения, соответствующих движению лифта, из идентифицированных пика и впадины. Определяют указание изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения. Предложено также устройство для обнаружения движения пользователя или объекта в лифте. Достигается создание улучшенного способа и устройства для обнаружения движения пользователя в лифте и для определения поднятия пользователя из этого движения, например, в терминах этажа или уровня здания, на котором находится пользователь. 2 н. и 12 з.п. ф-лы, 5 ил.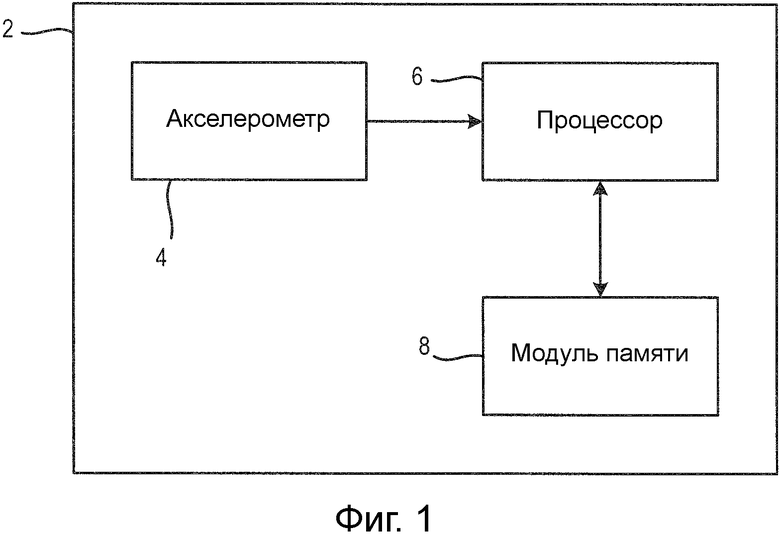
1. Способ обнаружения движения пользователя или объекта в лифте, причем способ содержит этапы, на которых:
измеряют ускорение, испытываемое пользователем или объектом, чтобы получить последовательность измерений ускорения;
обрабатывают последовательность измерений ускорения, чтобы идентифицировать пик и впадину в них, которые ассоциируются с началом и окончанием движения лифта;
идентифицируют сегмент измерений ускорения, соответствующих движению лифта, из идентифицированных пика и впадины; и
определяют указание изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют сигнал уровня шума из последовательности измерений ускорения, причем сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и
сравнивают сигнал уровня шума с пороговым значением шума;
и при этом этап обработки измерений ускорения содержит этап, на котором:
обрабатывают только те измерения ускорения, где соответствующая часть сигнала уровня шума меньше порогового значения шума.
3. Способ по п. 1, в котором этап обработки содержит этапы, на которых:
сравнивают амплитуду каждого измерения ускорения с пороговым значением пика и пороговым значением впадины, причем пороговое значение пика выше, чем пороговое значение впадины;
идентифицируют возможный пик в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых превышают пороговое значение пика, и идентифицируют возможную впадину в измерениях ускорения как группу последовательных измерений ускорения, амплитуды которых ниже порогового значения впадины.
4. Способ по п. 3, в котором этап обработки дополнительно содержит этап, на котором:
отбрасывают любой идентифицированный возможный пик или идентифицированную возможную впадину, где продолжительность соответствующей группы измерений ускорения меньше минимального порогового времени.
5. Способ по пп. 3 или 4, причем способ дополнительно содержит этапы, на которых:
определяют сигнал уровня шума из последовательности измерений ускорения, причем сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и
сравнивают сигнал уровня шума с пороговым значением шума;
и при этом этап обработки измерений ускорения дополнительно содержит этап, на котором:
отбрасывают любой идентифицированный возможный пик и идентифицированную возможную впадину, где соответствующая часть сигнала уровня шума превышает пороговое значение шума.
6. Способ по любому из пп. 1-3, в котором этап идентификации сегмента измерений ускорения, соответствующей движению лифта, из идентифицированных пика и впадины содержит этапы, на которых:
определяют время начала движения лифта посредством исследования измерений ускорения перед самым ранним из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным, и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести; и
определяют время окончания движения лифта посредством исследования измерений ускорения после самого последнего из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным, и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести.
7. Способ по любому из пп. 1-3, в котором этап обработки дополнительно содержит этап, на котором:
применяют фильтр к полученным измерениям ускорения, чтобы подавлять высокочастотный шум в измерениях до идентификации пиков и впадин.
8. Устройство для обнаружения движения пользователя или объекта в лифте, причем устройство содержит:
процессор, который сконфигурирован, чтобы принимать измерения ускорения, испытываемого пользователем или объектом, обрабатывать измерения ускорения, чтобы идентифицировать пик и впадину в них, которые ассоциированы с началом и окончанием движения лифта, идентифицировать сегмент измерений ускорения, соответствующий движению лифта, из идентифицированных пика и впадины и определять указание изменения в поднятии пользователя или объекта во время движения лифта из идентифицированного сегмента измерений ускорения.
9. Устройство по п. 8, в котором процессор дополнительно сконфигурирован, чтобы
определять сигнал уровня шума из измерений ускорения, причем сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и
сравнивать сигнал уровня шума с пороговым значением шума;
и при этом процессор сконфигурирован, чтобы обрабатывать только те измерения ускорения, где соответствующая часть сигнала уровня шума меньше порогового значения шума.
10. Устройство по п. 8, в котором процессор сконфигурирован, чтобы идентифицировать пик и впадину в измерениях ускорения посредством
сравнения амплитуды каждого измерения ускорения с пороговым значением пика и пороговым значением впадины, причем пороговое значение пика выше, чем пороговое значение впадины; и
идентификации возможного пика в измерениях ускорения как группы последовательных измерений ускорения, амплитуды которых превышают пороговое значение пика, и идентификации возможной впадины в измерениях ускорения как группы последовательных измерений ускорения, амплитуды которых ниже порогового значения впадины.
11. Устройство по п. 10, в котором процессор дополнительно конфигурируется, чтобы идентифицировать пик и впадину в измерениях ускорения посредством отбрасывания любого идентифицированного возможного пика или идентифицированной возможной впадины, где продолжительность соответствующей группы измерений ускорения меньше минимального порогового значения времени.
12. Устройство по пп. 10 или 11, в котором процессор дополнительно сконфигурирован, чтобы:
определять сигнал уровня шума из измерений ускорения, причем сигнал уровня шума указывает уровень шума в каждом из измерений ускорения; и
сравнивать сигнал уровня шума с пороговым значением шума;
и при этом процессор сконфигурирован, чтобы идентифицировать пик и впадину в измерениях ускорения, отбрасывая любой идентифицированный возможный пик и идентифицированную возможную впадину, где соответствующая часть сигнала уровня шума превышает пороговое значение шума.
13. Устройство по любому из пп. 8-11, в котором процессор сконфигурирован, чтобы идентифицировать сегмент измерений ускорения, соответствующий движению лифта, из идентифицированных пика и впадины посредством:
определения времени начала движения лифта посредством исследования измерений ускорения перед самым ранним из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным, и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести; и
определения времени окончания движения лифта посредством исследования измерений ускорения после самого последнего из идентифицированного пика и впадины до тех пор, пока не будет найдено измерение ускорения, где ускорение является постоянным, и/или ускорение, по существу, соответствует ускорению вследствие силы тяжести.
14. Устройство по любому из пп. 8-11, в котором процессор дополнительно сконфигурирован, чтобы применять фильтр к полученным измерениям ускорения, чтобы подавлять высокочастотный шум в измерениях до идентификации пиков и впадин.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US20020191453A1, 19.12.2002. | |||

