ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к способу и устройству для оценивания риска падения пользователя, и в частности относится к способу и устройству, которые оценивают риск падения пользователя на основе анализа движения пользователя при переходе из положения сидя в положение стоя.
УРОВЕНЬ ТЕХНИКИ
Падения являются одним из наибольших факторов риска здоровью для пожилых людей. Около одной трети пожилых людей старше возраста 65 лет падают по меньшей мере один раз в год.
Многих этих падений можно избежать посредством ранней идентификации риска падения и применения эффективных и целевых программ предотвращения падений.
Испытания на предотвращение падений, основанные на тренировке силы и равновесия (SBT), показали, что риск падения для пожилых людей может быть уменьшен. Показатели качества равновесия могут быть использованы в качестве ранних указателей риска падения, и также для измерения прогресса программ предотвращения падений. Переход "из положения сидя в положение стоя" (STS) был идентифицирован как одно важное движение, которое может быть использовано в качестве показателя качества равновесия и таким образом показателя риска падения. В повседневной жизни человек выполняет STS-переход много раз в день.
Обычно, клинические системы измерений (такие как клинические системы измерений, включающие в себя стабилометрическую платформу и систему оптических маркеров) используются для предоставления точной количественной оценки мощности во время перехода из положения сидя в положение стоя. В этих системах измерений, стабилометрическая платформа обеспечивает вертикальную силу опорной реакции, и система оптических маркеров предоставляет показатель смещения в трех измерениях. Комбинация обоих измерений используется для количественной оценки мощности во время перехода из положения сидя в положение стоя.
Эти системы измерений имеют несколько недостатков. Во-первых, они являются клиническим оборудованием, которое требует посещение пользователем клиники. Подготовка к измерениям и их выполнение является трудоемким (особенно, если оптические маркеры должны быть прикреплены к конкретным частям тела). В дополнение, они предоставляют только снимок качества равновесия пользователя, когда, благодаря клиническим условиям, пользователь в общем выполняет сверх своей средней способности. Наконец, системы измерений предусматривают процедуру, которая достаточно затруднительна для пользователя.
Оценка риска падения в домашней среде обычно проводится посредством телефонного интервью или посредством самостоятельного предоставления сведений от самих пользователей, но эти оценки неособенно надежны.
Однако, последние достижения в нательных датчиках улучшили домашнее применение/инструменты оценки риска падения. Мощность переходов из положения сидя в положение стоя может быть получена с использованием нательной сенсорной платформы, которая включает в себя акселерометры. Одна такая система описана в WO 2010/035187.
Эксперименты показали, что мощность произведенная во время STS, которая измерена с помощью акселерометра, коррелируется с мощностью, измеренной с использованием стабилометрической платформы при стандартной клинической оценке. Однако, недостаток этого способа состоит в том, что он требует хорошего разграничения моментов времени начала и окончания STS-перехода, так как эти моменты времени влияют на итог вычисления. В частности, начальное время будет влиять на максимальную мощность, которая идентифицирована, так как она воздействует на объединение, которое должно быть применено к сигналу акселерометра для того, чтобы получить мощность.
В клинических или лабораторных условиях, эта проблема является менее критичной, так как моменты времени начала и окончания могут быть определены посредством наблюдения за пользователем по мере выполнения им STS. Анализ сигнала может быть выполнен с помощью этих наблюдений. Также, сигнал ускорения около STS-перехода менее шумный, чем он был бы в ситуации повседневной жизни. Это также помогает разграничению, также как и уменьшению влияния ошибок при разграничении. Вне клинических условий (например, в повседневной жизни), это наблюдение отсутствует, и разграничение является проблемой. В дополнение, сигнал ускорения будет более шумным. Для пользователя возможно вручную указать начало и/или окончание перехода, например, нажимая кнопку в начале или конце STS, но это значит, что система не является ненавязчивой.
Вследствие этого, есть потребность в улучшенном способе и устройстве для оценивания риска падения посредством анализа перехода из положения сидя в положение стоя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Было обнаружено, что есть сильная линейная корреляция между пиковым вертикальным ускорением, которое возникает во время перехода из положения сидя в положение стоя, и пиковой мощностью, генерируемой пользователем во время перехода. Эта корреляция показана на Фиг. 1, на которой изображен график зависимости пиковой мощности во время перехода из положения сидя в положение стоя от пикового вертикального ускорения для нескольких вариаций движения из положения сидя в положение стоя для некоторого числа разных пользователей. На этой Фигуре, как ускорение, так и мощность были масштабированы и нормализованы по отношению к гравитации. Вариации перехода из положения сидя в положение стоя включают в себя переход с нормальной скоростью (NormSTS), переход с нормальной скоростью, при котором пользователь не использует свои руки (NormSTSwithoutArms), более быстрый переход (FastSTS), и переходы, которые происходят как часть теста "встал и пошел" (TUG) с быстрой или нормальной скоростью, где пользователь должен встать, пройти и возвратиться в положение сидя (помеченные STSinFastTUG и STSinNormTUG соответственно).
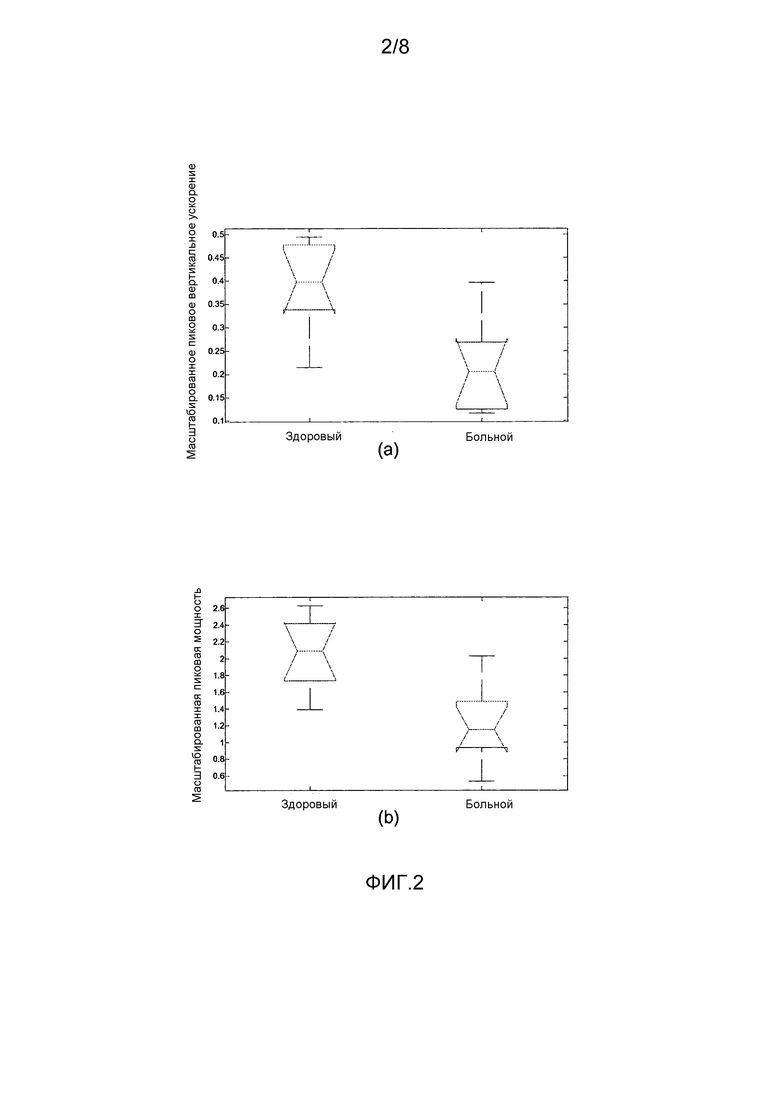
Графики на Фиг. 2 иллюстрируют, что пиковое вертикальное ускорение имеет такую же чувствительность к риску падения как пиковая мощность. В частности, левая сторона Фиг. 2(a) показывает анализ вариантности значений пикового вертикального ускорения (масштабированных для гравитации), которые обнаружены для здоровых (т.е. с низким риском падения) пользователей, и правая сторона показывает анализ вариантности значений пикового вертикального ускорения (масштабированных для гравитации), которые обнаружены для больных (т.е. с высоким риском падения) пользователей. Фиг. 2(b) показывает соответствующий анализ вариантности для пиковой мощности, и таким образом может быть видно, что пиковое вертикальное ускорение во время перехода из положения сидя в положение стоя обеспечивает аналогичную информацию в отношении риска падения пользователя, как и пиковая мощность.
Таким образом, данное изобретение использует открытие, что пиковое вертикальное ускорение во время перехода из положения сидя в положение стоя обеспечивает полезный показатель риска падения пользователя. В частности, согласно первому аспекту данного изобретения, предусматривается способ оценивания риска падения пользователя, причем способ содержит анализирование измерения ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя; идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя; и оценивания риска падения для пользователя исходя из идентифицированного пикового вертикального ускорения.
В предпочтительных вариантах осуществления, идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя, и масштабированное пиковое вертикальное ускорение используется для оценивания риска падения для пользователя. Ошибки калибровки в датчике измерения могут вносить ошибки в пиковое вертикальное ускорение и, таким образом, оценку риска падения. Вследствие этого, масштабирование пикового вертикального ускорения таким образом означает, что ошибки калибровки могут быть удалены из датчика измерения.
В предпочтительном варианте осуществления, способ дополнительно содержит этапы оценивания ускорения из-за гравитации исходя из измерений ускорения пользователя; и вычитания оцененного ускорения из-за гравитации из идентифицированного пикового вертикального ускорения, чтобы дать масштабированное пиковое вертикальное ускорение.
В альтернативном варианте осуществления, способ дополнительно содержит этапы оценивания ускорения из-за гравитации исходя из измерений ускорения пользователя; и вычитания оцененного ускорения из-за гравитации из измерений ускорения пользователя, чтобы дать масштабированные измерения ускорения пользователя; при этом этап идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя содержит идентифицирование пикового вертикального ускорения пользователя исходя из масштабированных измерений ускорения.
Предпочтительно, оценку гравитация получают исходя из измерений ускорения посредством усреднения множества измерений ускорения, возникающего в период времени до начала перехода из положения сидя в положение стоя, чтобы дать оценку гравитации.
В некоторых вариантах осуществления, оценку гравитации получают исходя из измерений ускорения в период времени до начала перехода из положения сидя в положение стоя, только если стандартное отклонение, вариантность или диапазон множества измерений ускорения, возникающего в период времени, меньше, чем пороговое значение.
В некоторых вариантах осуществления, масштабированное пиковое вертикальное ускорение нормализуют с использованием оценки гравитации, и нормализованное масштабированное пиковое вертикальное ускорение используется для оценивания риска падения для пользователя.
В предпочтительных реализациях, измерения ускорения пользователя получают с использованием одного или более акселерометров, прикрепленных к пользователю или носимых им.
В альтернативных реализациях, измерения ускорения пользователя получают с использованием стабилометрической платформы, которая измеряет силы, генерируемые пользователем во время движения.
В некоторых вариантах осуществления, способ содержит этап идентифицирования для множества переходов из положения сидя в положение стоя, и в котором этап оценивания риска падения содержит определение риска падения исходя из средней величины пиковых вертикальных ускорений, идентифицированных для множества переходов из положения сидя в положение стоя.
В некоторых вариантах осуществления, этап оценивания риска падения содержит определение риска падения исходя из средней величины пиковых вертикальных ускорений, идентифицированных для множества переходов из положения сидя в положение стоя, и указания числа раз, которое пользователь выполнил переход из положения сидя в положение стоя в точно определенный период времени.
Некоторые варианты осуществления дополнительно содержат этап сравнения оцененного риска падения с одним или более ранее оцененных рисков падения для определения тенденции риска падения для пользователя.
Согласно второму аспекту данного изобретения, предусматривается компьютерный программный продукт, содержащий код компьютерной программы, который при исполнении на компьютере или процессоре побуждает компьютер или процессор определить риск падения для пользователя посредством анализирования измерений ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя; идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя; и оценивания риска падения для пользователя исходя из идентифицированного пикового вертикального ускорения.
В предпочтительных вариантах осуществления, компьютерный программный продукт дополнительно выполнен с возможностью предписания компьютеру или процессору масштабировать идентифицированное пиковое вертикальное ускорение с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя, и использовать масштабированное пиковое вертикальное ускорение для оценивания риска падения для пользователя.
Также предполагаются различные другие варианты осуществления компьютерного программного продукта, в которых код компьютерной программы дополнительно выполнен с возможностью предписания компьютеру или процессору выполнять любые из вышеописанных способов.
Согласно третьему аспекту данного изобретения, предусматривается устройство для оценивания риска падения для пользователя, причем устройство содержит блок обработки, выполненный с возможностью анализирования измерений ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя; идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя; и оценивания риска падения для пользователя исходя из идентифицированного пикового вертикального ускорения.
В предпочтительных вариантах осуществления, блок обработки выполнен с возможностью масштабирования идентифицированного пикового вертикального ускорения с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя, и использования масштабированного пикового вертикального ускорения для оценивания риска падения для пользователя.
Также предполагаются различные другие варианты осуществления устройства, в которых блок обработки дополнительно выполнен с возможностью исполнения любого из вышеописанных этапов способа.
Согласно четвертому аспекту данного изобретения, предусматривается устройство, которое выполнено с возможностью ношения пользователем, причем устройство, содержащее акселерометр, который измеряет ускорение, действующее на устройство в трех измерениях; и устройство, которое описано выше, в котором блок обработки выполнен с возможностью обработки измерения ускорения от акселерометра.
Согласно пятому аспекту данного изобретения, предусматривается система, которая содержит устройство, которое выполнено с возможностью ношения пользователем, причем устройство, содержащее акселерометр, который измеряет ускорение, действующее на устройство в трех измерениях; и базовый блок, который выполнен с возможностью осуществления связи с устройством, и которое содержит устройство, которое описано выше, в котором блок обработки выполнен с возможностью обработки измерения ускорения от акселерометра.
Согласно шестому аспекту данного изобретения, предусматривается система, которая содержит стабилометрическую платформу; и базовый блок, который содержит устройство, которое описано выше, в котором блок обработки выполнен с возможностью приема измерений сил от стабилометрической платформы и обработки измерений сил для определения измерений ускорения.
Согласно седьмому аспекту данного изобретения, предусматривается способ оценивания риска падения пользователя, причем способ, содержащий анализирование измерений ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя; идентифицирование пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя, при этом идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя; и оценивание риска падения для пользователя исходя из масштабированного пикового вертикального ускорения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания данного изобретения, и чтобы более явно показать, как оно может привести к полезному действию, теперь будет сделана ссылка, только в качестве примера, на прилагаемые чертежи, на которых:
Фиг. 1 является графиком, иллюстрирующим корреляцию между пиковым вертикальным ускорением и пиковой мощностью при переходе из положения сидя в положение стоя;
Фиг. 2 иллюстрирует чувствительность пикового вертикального ускорения и пиковой мощности к риску падения;
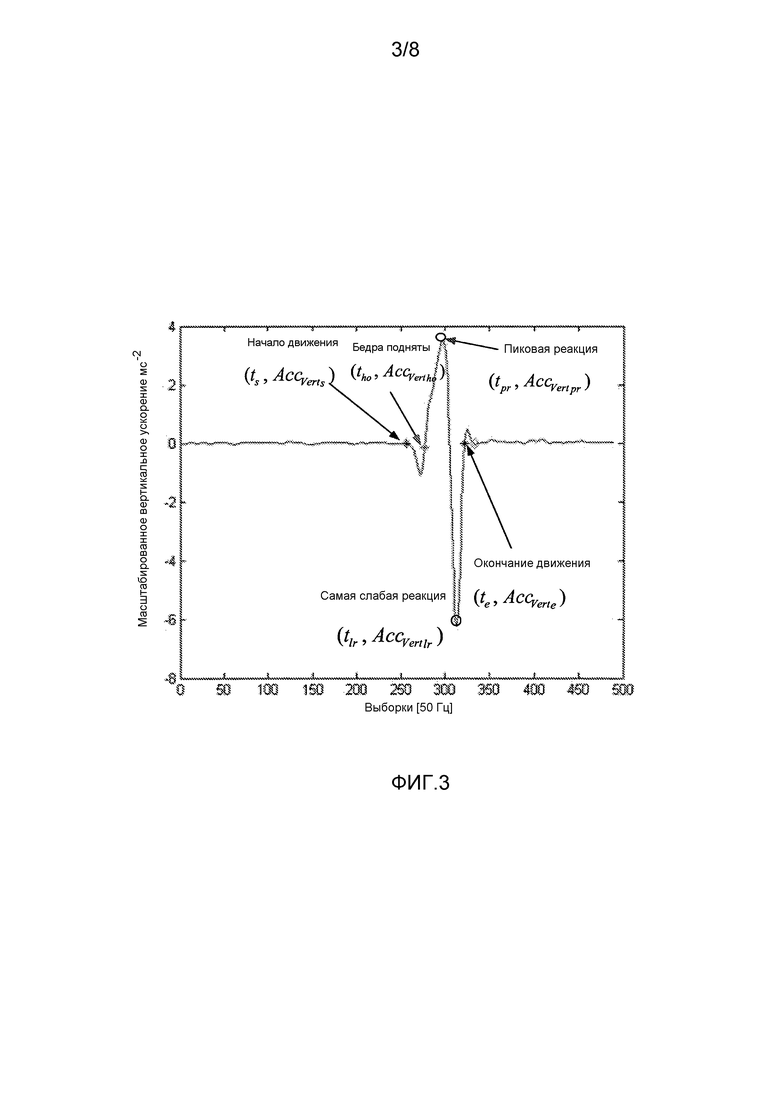
Фиг. 3 является графиком, иллюстрирующим пример вариации вертикального ускорения во время перехода из положения сидя в положение стоя;
Фиг. 4 является схемой последовательности операций, иллюстрирующей способ определения риска падения согласно варианту осуществления;
Фиг. 5 является схемой последовательности операций, иллюстрирующей способ определения риска падения согласно другому варианту осуществления;
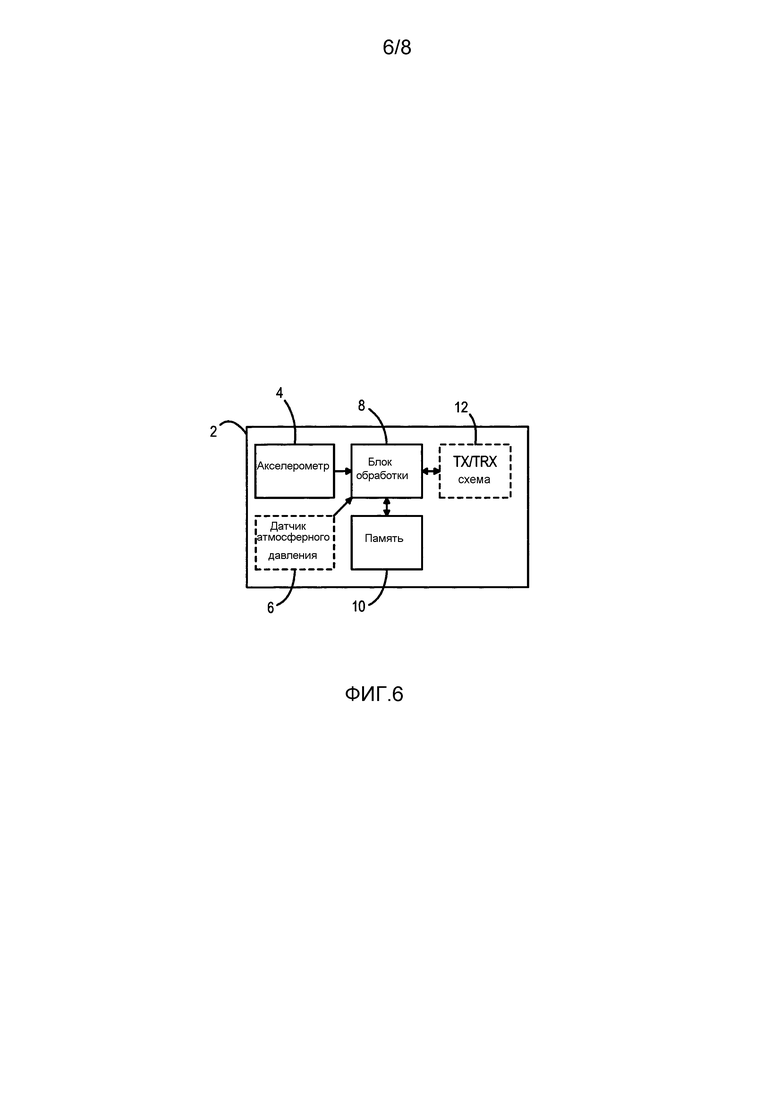
Фиг. 6 является блок-схемой устройства согласно варианту осуществления данного изобретения;
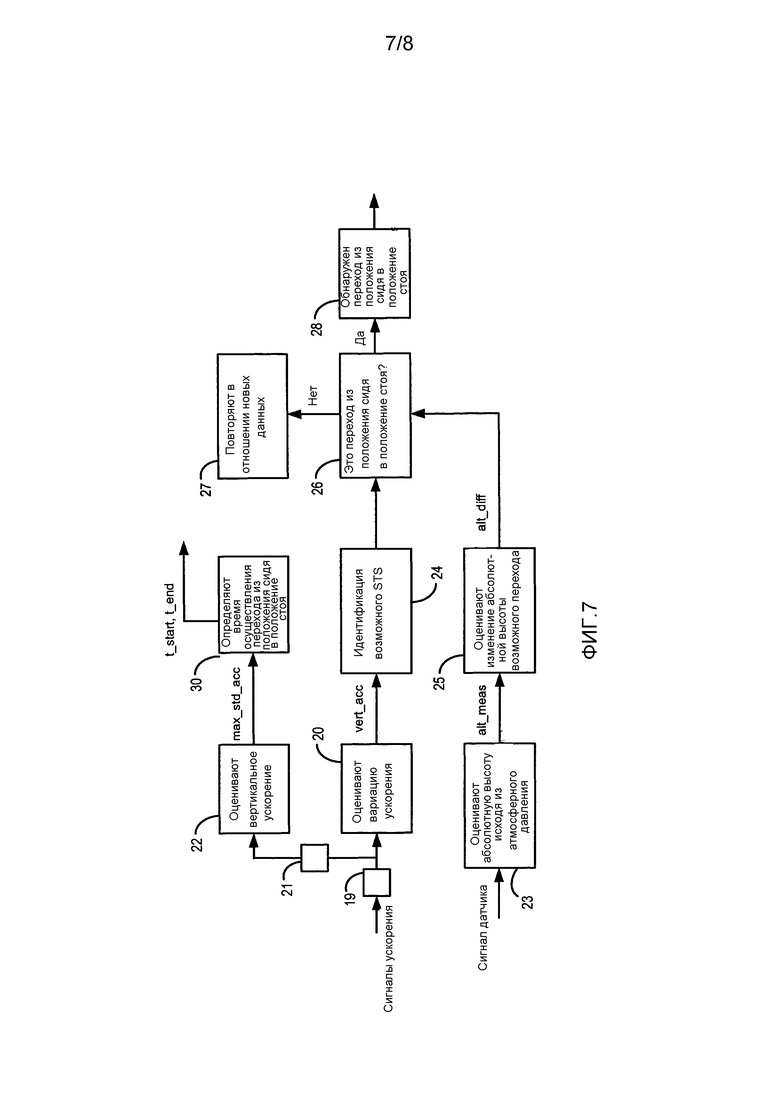
Фиг. 7 является блок-схемой, иллюстрирующей алгоритм для обнаружения перехода из положения сидя в положение стоя в измерениях вертикального ускорения пользователя;
Фиг. 8 показывает входные сигналы для алгоритма и сигналы, полученные во время некоторых из этапов обработки; и
Фиг. 9 иллюстрирует примерный согласованный фильтр, который был оптимизирован для использования при обнаружении перехода из положения сидя в положение стоя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
График на Фиг. 3 показывает вертикальное ускорение во время обычного движения из положения сидя в положение стоя (которое было масштабировано для исключения ускорения из-за гравитации). Пользователь начинает из состояния покоя (т.е. измеренное ускорение в вертикальном направлении из-за движения пользователя равняется примерно 0), и пользователь начинает двигаться в момент времени ts. Ускорение, измеренное в этот момент времени, обозначается Accvert_s. Есть обычно небольшой минимум в профиле ускорения сразу после того, как пользователь начинает движение и после того, как он поднимется со своего стула. Впоследствии, бедра пользователя покидают средство поддержки (т.е. стул) в момент времени tho ("ho" представляет собой "hip off" ("бедра подняты")), и ускорение в этот момент времени обозначается Accvert_ho. Ускорение в вертикальном направлении затем увеличивается до пика (пиковая реакция), обозначенного Accvert_pr в момент времени tpr. За пиковой реакцией следует самая слабая реакция, которой является отрицательное ускорение, обозначенное Accvert_lr, возникающее в момент времени tlr. Окончание движения происходит в момент времени te, с ускорением, обозначенным Accvert_e.
Схема последовательности операций на Фиг. 4 иллюстрирует способ определения риска падения для пользователя согласно варианту осуществления. На этапе 101, определяется, выполнил ли пользователь переход из положения сидя в положение стоя. Этот этап может быть выполнен некоторым числом разных способов, в зависимости от способа, которым контролируются движения пользователя.
В некоторых вариантах осуществления, пользователь может выполнять переход из положения сидя в положение стоя при нахождении на стабилометрической платформе, которая измеряет силы, генерируемые пользователем по мере выполнения им перехода. В этом случае, этап 101 может содержать прием указания (например, возникающего в результате нажатия кнопки) от клинициста, который наблюдает за пользователем, пока он выполняет переход, или от пользователя, когда он выполняет переход, или он может содержать анализирование сигналов от системы оптических маркеров или анализирование сил, измеренных стабилометрической платформой, для того, чтобы определить, выполнил ли пользователь переход.
В других вариантах осуществления, пользователь может носить или переносить устройство, которое содержит один или более датчиков движения, такое как акселерометр, и сигналы от этого или этих датчиков могут быть обработаны для определения, выполнил ли пользователь переход. В этих вариантах осуществления, для пользователя может также быть возможно вручную предоставить указание, что он начал и/или завершил переход (например, посредством нажатия кнопки на устройстве).
Если определено, что пользователь выполнил переход из положения сидя в положение стоя, способ тогда переходит к идентифицированию пикового вертикального ускорения, генерируемого пользователем при завершении перехода из положения сидя в положение стоя (этап 103). Это пиковое вертикальное ускорение будет соответствовать в общем пику, помеченному как "пиковая реакция" на Фиг. 3, и является наибольшим ускорением вверх, которое возникает во время перехода из положения сидя в положение стоя.
Когда движения пользователя контролируются с использованием стабилометрической платформы, сигнал, представляющий вертикальное ускорение, может быть определен исходя из измерений силы посредством деления измеренных сил на массу пользователя. Иначе, когда движения пользователя контролируются с использованием акселерометра, ускорение в вертикальном направлении может быть оценено исходя из сигнала от трехмерного акселерометра. В некоторых вариантах осуществления, вертикальное ускорение может быть оценено как норма измерений ускорения в трех измерениях.
Таким образом, вслед за определением на этапе 101, что переход из положения сидя в положение стоя произошел (определением, также предоставляющим указание момента времени, в который произошел переход, например, в том, что касается моментов времени начала и окончания перехода), участок сигнала вертикального ускорения около идентифицированного перехода из положения сидя в положение стоя выбирается для анализа (т.е. участок между идентифицированными моментами времени начала и окончания перехода из положения сидя в положение стоя), и пиковое вертикальное ускорение идентифицируется как наибольший максимум на участке сигнала вертикального ускорения, соответствующего переходу из положения сидя в положение стоя.
Как только пиковое вертикальное ускорение было определено на этапе 103, способ переходит к этапу 105, на котором пиковое вертикальное ускорение используется для оценивания риска падения для пользователя. В общем, как показано на Фиг. 2(a), те, кто с большим риском падения, производят более низкие значения пикового вертикального ускорения, чем те, кто с меньшим риском падения. Таким образом, в некоторых вариантах осуществления, риск падения может быть обратно пропорциональным значению пикового вертикального ускорения (например, fall_risk α 1/peak_vertical_acceleration).
В некоторых вариантах осуществления, риск падения может быть сгенерирован на этапе 105 из среднего пикового вертикального ускорения, сгенерированного пользователем, за множество переходов из положения сидя в положение стоя. Средняя величина пикового вертикального ускорения может быть получена из некоторого числа переходов из положения сидя в положение стоя, выполненных за один сеанс контролирования, или из переходов из положения сидя в положение стоя, выполненных за некоторое число других дней.
В некоторых вариантах осуществления, риск падения, определенный на этапе 105, может быт сравнен с ранее определенными рисками падения, чтобы идентифицировать тенденцию при выполнении перехода из положения сидя в положение стоя пользователем. Таким образом, уменьшение пикового вертикального ускорения (или среднего пикового вертикального ускорения) указывает увеличение риска падения пользователя, и наоборот.
В некоторых вариантах осуществления, число раз, которое пользователь выполняет переход из положения сидя в положение стоя в заданный период времени (например, день), может также быть записано и использовано совместно с пиковым вертикальным ускорением для предоставления указания риска падения.
Использование пикового вертикального ускорения в качестве параметра для оценивания риска падения имеет некоторое число преимуществ над использованием мощности или пиковой мощности. Во-первых, пиковое вертикальное ускорение менее чувствительно к точному обнаружению начальных и конечных точек перехода из положения сидя в положение стоя, что делает его более обоснованным и надежным для оценки риска падения, чем мощность. В дополнение, оценка пикового вертикального ускорения требует меньше вычислительных усилий, чем оценивание мощности (которое предусматривает объединение сигналов ускорения). Эти преимущества делают контролирование пикового вертикального ускорения подходящим для реализации применений долгосрочного контролирования риска падения, например, с использованием нательных датчиков.
Способ определения риска падения согласно другому варианту осуществления показан на Фиг. 5. В этом способе, первые два этапа являются такими же как на Фиг. 4. То есть, определяется, выполнил ли пользователь переход из положения сидя в положение стоя (этап 101), и если выполнил, идентифицируется пиковое вертикальное ускорение во время перехода (этап 103).
В этом варианте осуществления, понимается, что в частности (но неисключительно) для реализаций с нательными датчиками данного изобретения, ошибки калибровки в измерениях датчиков могут вносить ошибки в оценку риска падения.
Вследствие этого, эти ошибки калибровки учитываются посредством масштабирования пикового вертикального ускорения с использованием оценки гравитационного ускорения, которая получена исходя из измерений вертикального ускорения около момента времени, в которой выполнен переход из положения сидя в положение стоя.
В частности, на этапе 107, оценка ускорения из-за гравитации оценивается исходя из сигнала вертикального ускорения, и на этапе 109 эта оценка используется для масштабирования идентифицированного пикового вертикального ускорения, чтобы дать масштабированное пиковое вертикальное ускорение. Пиковое вертикальное ускорение предпочтительно масштабируется посредством вычитания оценки гравитации из пикового вертикального ускорения. Масштабированное пиковое вертикальное ускорение затем используется для определения риска падения для пользователя (этап 111).
Так как оценка гравитационного ускорения получена исходя из измерений вертикального ускорения от датчика (например, акселерометра), оценка будет также подвержена ошибке калибровки датчика, и масштабирование пикового вертикального ускорения с этой оценкой в большой степени удалит ошибку калибровки.
Будет понятно, что этапы 101, 103, 107 и 109 не должны выполняться в порядке, показанном на Фиг. 5. Например, возможно определять и периодически обновлять оценку ускорения из-за гравитации для использования, когда впоследствии обнаруживается переход из положения сидя в положение стоя, и затем применить ее к пиковому вертикальному ускорению, когда оно идентифицировано на этапе 103. В качестве альтернативы, оценка гравитации может быть использована для масштабирования всех измерений вертикального ускорения, причем пиковое вертикальное ускорение идентифицируется из масштабированных измерений вертикального ускорения.
В некоторых вариантах осуществления, оценку ускорения из-за гравитации получают на этапе 107, взяв среднее (например) усредненное значение вертикального ускорения за множество выборок вертикального ускорения за предварительно определенный период до указанного начала перехода из положения сидя в положение стоя. Предварительно определенный период должен в общем соответствовать периоду времени, в который пользователь сидит на стуле, и вследствие этого ускорение из-за гравитации должно преобладать над вертикальным ускорением. Предварительно определенный период может быть любой продолжительности, например, 3 секунды.
В некоторых вариантах осуществления, может быть подтверждено, что вертикальное ускорение в предварительно определенный период наиболее вероятно возникает только из-за гравитации, посредством определения, является ли стандартное отклонение вертикального ускорения в предварительно определенный период меньше, чем пороговая величина. В некоторых вариантах осуществления, пороговая величина может быть 0,1, но будет понятно, что могут быть использованы другие значения. Также будет понятно, что показатели, отличные от стандартного отклонения, могут быть использованы для определения, возникает ли вертикальное ускорение в предварительно определенный период наиболее вероятно только из-за гравитации, такие как вариантность вертикального ускорения или диапазона. Если оно меньше, чем пороговая величина, среднее из значений вертикального ускорения может быть определено и использовано в качестве оценки ускорения из-за гравитации. В примере по Фиг. 3, среднее значение вертикального ускорения из индекса выборки 100-250 (где начинается переход из положения сидя в положение стоя) используется в качестве оценки ускорения из-за гравитации для масштабирования пикового вертикального ускорения перехода.
В вариантах осуществления, где оценка ускорения из-за гравитации определяется и периодически обновляется, ускорение измерения может постоянно или регулярно контролироваться на предмет возникновения предварительно определенного периода, как описано выше (т.е. когда стандартное отклонение ниже пороговой величины), и если такой период возникает, новое значение для оценки гравитационного ускорения может быть определено с использованием выборок в этом периоде.
Фиг. 6 иллюстрирует устройство 2 для использования при определении риска падения для пользователя согласно варианту осуществления данного изобретения. В этом варианте осуществления, данное изобретение предусматривает устройство в форме блока 2 датчиков, который должен носить пользователь. Блок 2 датчиков может быть предусмотрен в форме подвески с шейным шнурком для размещения вокруг шеи пользователя. В качестве альтернативы, блок 2 датчиков может быть выполнен с возможностью ношения на разных частях тела пользователя, таких как туловище, таз или грудина, и будет содержать подходящую компоновку для прикрепления блока 2 датчиков к этой части тела (например, пояс или ремень, если блок 2 прикрепляется к тазу или грудине).
Блок 2 датчиков используется для измерения движения пользователя и может быть использован для обработки измерения для определения, когда пользователь выполнил изменение позы из позы сидя в позу стоя, и пикового вертикального ускорения, которое возникает во время этого движения. Блок 2 датчиков может быть также использован для определения риска падения для пользователя 4 исходя из определенного пикового вертикального ускорения.
В альтернативных реализациях, некоторое или все из обработки измерения, определения пикового вертикального ускорения и указания риска падения могут быть выполнены в базовом блоке, который является отдельным от блока 2 датчиков, носимого пользователем (не показан на Фиг. 6). В этом случае, блок 2 датчиков может передавать в базовый блок измерения движения или информацию по идентифицированным переходам с использованием проводного или беспроводного соединения.
В проиллюстрированном варианте осуществления, блок 2 датчиков содержит акселерометр 4, который измеряет ускорение вдоль трех ортогональных осей (и который выводит соответствующие сигналы, указывающие ускорение вдоль каждой из осей), и опциональный датчик 6, который изменяет абсолютную высоту или высоту блока 2 датчиков над землей (или более конкретно, который измеряет изменения абсолютной высоты или высоты блока 2 датчиков над землей, или обеспечивает возможность измерения этих изменений). Датчик 6 для измерения абсолютной высоты или высоты блока 2 датчиков может содержать, например, высотомер или датчик атмосферного давления, хотя специалисты в данной области техники будут осведомлены о других типах датчиков, которые могут быть использованы. В некоторых вариантах осуществления, измерения от акселерометра 4 могут быть обработаны для определения высоты блока 2 датчиков над землей, или для определения изменения высоты блока 2 датчиков. Сигналы, выведенные акселерометром 4 и датчиком 6 (где присутствуют) предоставляются блоку обработки 8 для анализа.
Блок 2 датчиков также содержит память 10 и опционально также передатчик или схему 12 приемопередатчика. Память 10 используется для хранения измерений от акселерометра 4 и датчика 6, и для хранения результатов анализа процессором 8. Передатчик или схема 12 приемопередатчика может быть использована для передачи измерений или результатов анализа удаленному (базовому) блоку или компьютеру, где они могут быть просмотрены или изучены пользователем или поставщиком медицинских услуг.
В некоторых вариантах осуществления, акселерометр 4 является акселерометром на основе микроэлектромеханической системы (MEMS). Выборка ускорения, испытываемого акселерометром 4, может осуществляться с частотой 50 Гц, будет понятно, что могут быть использованы другие частоты осуществления выборки. Когда датчик 6 является датчиком атмосферного давления или высотомером, выборка измерений высоты блока 2 датчиков над землей может быть осуществлена с частотой около 1,8 Гц, хотя опять будет понятно, что могут быть использованы другие частоты осуществления выборки.
В зависимости от конкретного типа датчика, используемого для датчика 6 для измерения высоты, датчик 6 может выводить сигналы, указывающие высоту над землей (или уровнем моря в случае датчика атмосферного давления), в этом случае временные ряды измерений высоты могут быть проанализированы блоком 8 обработки для определения изменения высоты от одной выборки измерения к следующей (или за предварительно определенное число выборок измерений). В качестве альтернативы, датчик 6 может непосредственно вывести указание изменения высоты блока 2 датчиков из предыдущей или более ранней точно определенной выборки измерения.
Как отмечено выше, в некоторых вариантах осуществления, измерения, собранные акселерометром 4 и датчиком 6, могут быть проанализированы блоком 8 обработки в устройстве 2 датчика для определения, когда пользователь выполнил переход из положения сидя в положение стоя, пикового вертикального ускорения, испытываемого пользователем при выполнении перехода из положения сидя в положение стоя, и риска падения для пользователя исходя из пикового вертикального ускорения. В качестве альтернативы, измерения от акселерометра 4 и датчика 6 могут быть переданы в базовый блок посредством схемы 12 передатчика/приемопередатчика, причем базовый блок, анализирующий измерения для определения происшествия перехода из положения сидя в положение стоя. В каждом случае, обработка может быть выполнена в (почти) реальном времени, или измерения от акселерометра 4 и датчика 6 могут быть сохранены в памяти 10 или базовом блоке для будущей обработки (т.е. в режиме "оффлайн").
Будет понятно, что в альтернативных реализациях данного изобретения, вместо предусматривания в форме нательного устройства, которое содержит акселерометр 4 и датчик 6, устройство 2 может быть выполнено с возможностью использования или включения в себя стабилометрической платформы для измерения вертикальных сил, прикладываемых пользователем при выполнении перехода из положения сидя в положение стоя. В этом случае, блок 8 обработки может быть выполнен с возможностью обработки измерений стабилометрической платформы и определения вертикального ускорения пользователя при переходе из положения сидя в положение стоя.
Обнаружение перехода из положения сидя в положение стоя при измерениях ускорения. Примерный алгоритм для обработки измерений акселерометра для обнаружения перехода из положения сидя в положение стоя описан ниже со ссылкой на Фиг. 7, 8 и 9. Этот способ был описан в международной патентной заявке № PCT/IB 2012/053083, которая была подана 19 июня 2012 от имени Koninklijke Philips Electronics N.V., содержимое которой настоящим включено в настоящий документ посредством ссылки. Специалистам в данной области техники будет понятно, что данное изобретение не ограничено использованием способа, описанного ниже, для обнаружения переходов из положения сидя в положение стоя, и могут быть использованы другие способы для обнаружения перехода из положения сидя в положение стоя.
Фиг. 7 показывает примерный алгоритм для обнаружения перехода из положения сидя в положение стоя и для определения времени осуществления перехода. Алгоритм принимает в качестве ввода сигнал ускорения по трем измерениям, измеренный акселерометром 4 (который содержит отдельный сигнал для каждой из трех осей акселерометра 4) и измерение атмосферного давления от датчика 6 атмосферного давления.
Первоначальная часть алгоритма, представленная блоками 19, 20, 21, 22 и 23, является стадией предварительной обработки, на которой сигналы акселерометра и датчика давления обрабатываются для использования на последующих стадиях анализа алгоритма. Во-первых, 3D сигналы ускорения от акселерометра 4 проходят фильтр низких частот (блок 19) для удаления шума, который может повлиять на точность последующей обработки. В одном варианте осуществления, фильтр низких частот Баттерворта с частотой среза 2 Гц применяется к сигналам от каждой из трех осей акселерометра 4. В качестве альтернативы, будет возможно применять характеристики других фильтров, таких как фильтр низких частот Чебышева или других типов фильтров, известных специалистам в данной области техники. Также будет понятно, что частота среза 2 Гц может варьироваться в зависимости от конкретных характеристик шума от акселерометра 4.
Так как ориентация блока 2 датчиков относительно фиксированной системы координат (такой как Земля), в которой двигается пользователь, может изменяться (в частности, когда блок 2 датчиков имеет форму подвески), необходимо обработать измерения от акселерометра 4 для определения вертикальной составляющей ускорения, испытываемого блоком 2 датчиков (и вследствие этого пользователем) во время движения.
Вследствие этого, прошедшие фильтр низких частот 3D сигналы ускорения вводятся в блок 20, который оценивает вертикальное ускорение. Вертикальное ускорение обозначено как vert_acc.
Один способ оценивания вертикальной составляющей ускорения исходя из сигнала 3D акселерометра, имеющего произвольную ориентацию, описан в WO 2010/035191, содержимое которого настоящим включено в настоящий документ посредством ссылки. Кратко, согласно этому способу, вертикальная составляющая ускорения оценивается исходя из измерений ускорения, действующего на акселерометр, причем акселерометр, имеющий произвольную ориентацию относительно фиксированной системы координат, посредством (i) исследования сигналов от акселерометра для идентификации оси акселерометра, имеющей наибольшую составляющую ускорения, (ii) определения ориентации акселерометра посредством определения угла между ускорением, действующем на акселерометр (это ускорение предполагается в основном из-за гравитации), и осью с наибольшей составляющей ускорения и (iii) использования оцененной ориентации акселерометра для определения ускорения в вертикальном направлении исходя из измерений ускорения.
Специалисты в данной области техники будут осведомлены о других способах оценивания вертикальной составляющей ускорения исходя из измерений от 3D акселерометра. Например, блок 2 датчиков может включать в себя гироскоп для предоставления сигнала, указывающего ориентацию блока 2 датчиков, и этот сигнал может быть использован для получения вертикальной составляющей ускорения.
Фиг. 8(a) показывает примерный сигнал, представляющей вертикальное ускорение, полученное исходя из измерений посредством блока 2 датчиков пользователя, выполняющего переход из положения сидя в положение стоя, идущего 3 метра и затем присаживающегося обратно, что было повторено три раза. На Фиг. 8(a) может быть видно, что есть три отдельные области активности, представленные в сигнале.
Другая стадия предварительной обработки имеет отношение к вычислению оценки вариации ускорения. Во-первых, фильтр 21 высоких частот применяется к каждому из прошедших фильтр низких частот 3D сигналов ускорения, для того, чтобы удалить DC составляющую. В одном варианте осуществления, фильтр высоких частот Баттерворта с частотой среза 0,5 Гц используется для удаления D.C. составляющей в сигналах ускорения. Будет понятно, что может быть использован другой фильтр, например, фильтр высоких частот Чебышева или другие типы фильтров, известные специалистам в данной области техники. Также будет понятно, что может быть выбрана частота среза, отличная от 0,5 Гц.
После фильтрации высоких частот, в блоке 22 оценивается вариация ускорения. В предпочтительном варианте осуществления, стандартное отклонение каждой из трех составляющих 3D сигнала ускорения вычисляется для момента времени t на протяжении окна предварительно определенной продолжительности (например, одной секунды, хотя будет понятно, что может быть использовано другое окно с соответствующим размером), и идентифицируется максимальное стандартное отклонение за пределами трех осей. Максимальное стандартное отклонение в момент времени t обозначается как max_std_acc и задается уравнением 1 ниже.
max_std_acc=max[std(acc_i(t-0,5, t+0,5)), i=x, y, z] (1)
Фиг. 8(d) показывает стандартное отклонение, вычисленное для каждой из трех осей ускорения. На Фиг. 8(d), линия 40 соответствует сигналу акселерометра по оси x, линия 42 соответствует сигналу акселерометра по оси y, и линия 44 соответствует сигналу акселерометра по оси z.
Третья стадия 23 предварительной обработки оценивает абсолютную высоту блока 2 датчиков исходя из измерений от датчика 6 атмосферного давления. Как указано выше, вводом на этой стадии 23 является необработанный сигнал атмосферного давления pt от датчика 6 атмосферного давления. Как упомянуто ранее, выборка атмосферного давления может быть осуществлена с частотой 1,8 Гц (или в любом случае с гораздо меньшей частотой осуществления выборки, сигналы ускорения). Вследствие этого, во-первых осуществляется повышение частоты осуществления выборки сигнала атмосферного давления pt для совпадения с частотой осуществления выборки (например, 50 Гц) сигналов ускорения (сигнал давления с повышенной частотой осуществления выборки обозначается pt'). Абсолютная высота в момент времени t (обозначенная alt_t) может затем быть оценена исходя из измерений датчика атмосферного давления с использование уравнения 2 ниже:
alt_t=44330 * (1-pt'/101325)0,19 (2)
Уравнение (2) получается из функции преобразования атмосферного давления в абсолютную высоту, показанной в уравнении (3):

Где:
Итоговый сигнал абсолютной высоты затем сглаживается, предпочтительно с помощью медианного фильтра, имеющего предпочтительно определенную продолжительность, например около 3 секунд. Фильтр применяется к временным рядам оцененных абсолютных высот, приводя к сглаженному сигналу абсолютной высоты alt_meas, которая выводится из стадии 23 оценки абсолютной высоты, как показано на Фиг. 8(c). На Фиг. 8(c), ось y представляет абсолютную высоту в метрах относительно уровня моря.
Будет понятно, что в альтернативных вариантах осуществления данного изобретения, где используется другой тип датчика абсолютной высоты, высоты или изменения высоты, стадия 23 обработки может быть адаптирована или опущена по необходимости.
Следом за предварительной обработкой входных сигналов извлекаются различные признаки, для того, чтобы определить, произошел ли переход из положения сидя в положение стоя, и если произошел, мощность пользователя при выполнении перехода из положения сидя в положение стоя.
Для того, чтобы определить, произошел ли переход из положения сидя в положение стоя, требуются две основные стадии извлечения признаков. Первая стадия 24 идентифицирует возможные движения в сигнале vert_acc. В частности, блок 24 сопоставляет сигнал vert_acc с предварительно определенным шаблоном, представляющим вертикальное ускорение, возникновение которого ожидается во время перехода из положения сидя в положение стоя.
В некоторых реализациях, первая стадия 24 извлечения признаков применяет согласованный фильтр, имеющий импульсную характеристику, которая аппроксимирует вертикальное ускорение, испытываемое во время перехода из положения сидя в положение стоя, до сигнала вертикального ускорения (vert_acc), выведенного из блока 20 оценки вертикального ускорения. Выводом согласованного фильтра является набор коэффициентов, которые указывают совпадение измерений с шаблоном. Каждый коэффициент представляет совпадение некоторого числа последовательных выборок измерений (покрывая период времени такой же продолжительности, как предварительно определенный шаблон) с предварительно определенным шаблоном. Чем выше коэффициент, тем лучше совпадение измерений с шаблоном (и вследствие этого больше шанс, что произошел переход из положения сидя в положение стоя). Отфильтрованный сигнал обозначается как vert_acc_matfilt и показан на Фиг. 8(b).
В некоторых реализациях, согласованный фильтр, используемый в блоке 24, может быть таким, как показан на Фиг. 9, который был оптимизирован для обнаружения перехода из положения сидя в положение стоя. Согласованный фильтр, показанный на Фиг. 9, исключает гравитацию (9,8 мс-2) Первая кривая 50 показывает шаблон обычного вертикального ускорения для перехода из положения сидя в положение стоя. Вторая кривая 51 показывает примененную характеристику согласованного фильтра, которая аппроксимирует первую кривую 50. Будет понятно, что характеристика согласованного фильтра может быть выражена с использованием многих разных функций, но в этой реализации, характеристика согласованного фильтра задана уравнением 4 ниже.
A1•sinc[W1(t-t1)]+A2-sinc[W2(t-t2) (4)
Эта характеристика является комбинацией двух функций sinc с параметрами масштабирования, заданными в p. p - вектор параметров с шестью элементами:
[A, A2, W1, W2, t1, t2] (5)
Каждая запись в p задает разный параметр масштабирования. A1 и A2 являются параметрами масштабирования абсолютной высоты, которые задают отклонение пика двух синусоид соответственно. Параметры W1 и W2 являются параметрами масштабирования частоты, которые задают частоту двух синусоид. Параметры t1 и t2 являются параметрами масштабирования фазы, которые задают положение синусоид. Значения шести элементов в векторе параметров p заданы для подстройки функции согласованного фильтра к характеристике 50 перехода из положения сидя в положение стоя на Фиг. 7.
Будет понятно, что значения элементов вектора параметров p могут быть предоставлены многими известными способами подгонки кривой. В одном случае, желаемые параметры могут быть вычислены посредством применения алгоритма нелинейной регрессии методом наименьших квадратов, однако, многие другие типы алгоритмов подгонки хорошо известны в данной области техники и могут быть применены. Алгоритм нелинейной регрессии методом наименьших квадратов генерирует разные комбинации параметров, соответствующие разным функциям. Сгенерированные функции затем подгоняются к набору данных желаемых шаблонов согласно критерию ошибки наименьших квадратов. Когда функция дает минимальное значение ошибки наименьших квадратов среди комбинации параметров, обнаруживается оптимизированная подгонка.
После фильтрации согласованным фильтром, отфильтрованный сигнал обрабатывается для идентификации движений, который могут соответствовать переходу из положения сидя в положение стоя пользователем. Обработка состоит из во-первых идентифицирования любого пика, имеющего некоторую величину в предварительно определенном диапазоне, в сигнале vert_acc_matfilt. В примерном сигнале, показанном на Фиг. 8(d), идентифицируются пики, чьи величины находятся в диапазоне 110-200. Будет понятно, что эта часть обработки может в качестве альтернативы содержать идентифицирование любого пика, имеющего величину выше порогового значения, в сигнале vert_acc_matfilt. В этом случае, пороговая величина может соответствовать нижней границе для предварительно определенного диапазона, описанного выше. Однако, эта классификация может привести к более высокой частоте положительной идентификации сбоев, чем реализация диапазона, описанная выше.
Для каждого идентифицированного пика, алгоритм пытается идентифицировать соответствующий локальный минимум, возникающий в пределах предварительно определенного периода времени, до и после идентифицированного пика в сигнале vert_acc_matfilt. В примерном сигнале, показанном на Фиг. 8(b), алгоритм ищет локальный минимум в пределах периода 2 секунд до и после идентифицированного пика. Если локальные минимумы не идентифицированы для конкретного пика, этот пик сигнала vert_acc_matfilt не считается соответствующим переходу из положения сидя в положение стоя.
Наконец, возможное движение, соответствующее переходу из положения сидя в положение стоя, идентифицируется как пик, имеющий требуемый локальный минимум и в котором разность между величиной пика и величиной локального минимума перед пиком меньше, чем первое пороговое значение, разность между величиной пика и локального минимума после пика меньше, чем второе пороговое значение, и величина локального минимума после пика меньше, чем величина локального минимума перед пиком.
В упрощенных реализациях, требования величин, применяемые к локальному минимуму, могут быть смягчены, с помощью алгоритма, просто идентифицирующего пик, величину пика и присутствие локального минимума до и после пика.
В примерном сигнале, показанном на Фиг. 8(b), первая пороговая величина равняется 25 и вторая пороговая величина равняется 200. Будет понятно, что значения, выбранные для первой и второй пороговых величин, подстроены к экспериментальному набору данных, и могут быть использованы разные пороговые значения.
На Фиг. 8(b) может быть видно, что четыре возможных движения были помечены как возможные переходы из положения сидя в положение стоя, происходящие грубо в моменты времени 1,65, 1,69, 1,78 и 1,87.
Возможные переходы из положения сидя в положение стоя идентифицируются как действительные переходы из положения сидя в положение стоя, когда они происходят в тот же момент времени, как и изменение высоты блока 2 датчиков, которое находится в пределах предварительно определенного диапазона. Таким образом, блок 25 определяет изменение высоты или абсолютной высоты, которое происходит во время каждого возможного перехода из положения сидя в положение стоя. Для того, чтобы блок 25 оценил изменение абсолютной высоты возможного перехода из положения сидя в положение стоя, идентифицированного в блоке 24 фильтрации согласованным фильтром, блок 25 принимает копию сигнала vert_acc_matfilt и указания, какие части сигнала соответствуют возможным переходам из положения сидя в положение стоя, из блока 24 фильтрации согласованным фильтром. Блок 25 также принимает оцененный сигнал измерения абсолютной высоты, alt_meas, из блока 23 оценки.
Возможный переход из положения сидя в положение стоя, обнаруженный в выводе из согласованного фильтра 24, состоит из трех ключевых выборок. Ими являются пик, локальный минимум до пика (min_1) и локальный минимум после пика (min_2). Эти выборки промаркированы для одного из возможных переходов из положения сидя в положение стоя на Фиг. 8(b). Для того, чтобы оценить изменение абсолютной высоты за корректный период времени, необходимо идентифицировать правильные выборки в сигнале измерения абсолютной высоты.
Во-первых, обнаруживается ближайшая выборка (s1) до локального минимума перед пиком (min 1), чье значение больше, чем пороговая величина. Во-вторых, обнаруживается ближайшая выборка (s2) после локального минимума после пика (min_2), чье значение больше, чем пороговая величина. Будет понятно, что теоретически, эта пороговая величина должна быть g2; однако на практике, обучающим набором данных могут быть предоставлены другие значения из-за небольших неточностей акселерометра, например. В одной реализации, эта пороговая величина равняется 98.
Изменение абсолютной высоты возможного перехода из положения сидя в положение стоя затем оценивается как разность между абсолютными высотами при выборках s1 и s2.
Так как могут быть небольшие колебания в измерении абсолютной высоты (из-за шума), изменение абсолютной высоты возможного перехода из положения сидя в положение стоя может быть оценено как разность между усредненной величиной измерения абсолютной высоты за временное окно, начинающееся во втором локальном минимуме, и усредненной величиной измерения абсолютной высоты за временное окно, оканчивающееся в первом локальном минимуме. Эти временные окна могут составлять одну секунду, хотя будет понятно, что могут быть использованы окна с другими продолжительностями. В форме уравнения, это может быть выражено как
alt_diff=mean(alt_meas(s2:s2+tw))-mean(alt_meas(s1-tw:s1)) (6)
где tw является продолжительностью окна. Таким образом, оценивается усредненное значение данных абсолютной высоты за одну секунду до начала и одну секунду после возможного перехода. Когда произошел переход из положения сидя в положение стоя, более низкая абсолютная высота должна наблюдаться до перехода (когда пользователь находится в положении сидя), чем абсолютная высота, наблюдаемая после перехода (когда пользователь находится в положении стоя).
Вывод блока 24 идентификации возможного перехода из положения сидя в положение стоя и блока 25 изменения абсолютной высоты предоставляются в блок 26 принятия решения, который определяет, является ли какой-либо из кандидатов переходом из положения сидя в положение стоя. В частности, любое возможное движение, происходящее в тот же момент времени, как и изменение абсолютной высоты или высоты, в пределах предварительно определенного диапазона, считается переходом из положения сидя в положение стоя. Изменением высоты должно быть увеличение высоты (исходя из определения перехода из положения сидя в положение стоя), и предварительно определенный диапазон может быть, например, между 0,1 и 0,75 метра. В некоторых случаях верхняя граница может быть опущена за счет большей частоты положительного обнаружения сбоев.
На Фиг. 8 может быть видно, что из четырех возможных движений, помеченных на Фиг. 8(b), последние три происходят в тот же момент времени, как и увеличение высоты, которое находится в диапазоне 0,1-0,75. Таким образом, возможные движения в моменты времени 1,69, 1,78 и 1,87 считаются соответствующими переходам из положения сидя в положение стоя. Возможное движение в момент времени 1,65 совпадает с уменьшением измеренной высоты и вследствие этого отбрасывается. Алгоритм затем повторяется для нового набора входных данных (представлено блоком 27 на Фиг. 7).
Как описано выше, этап 103 идентифицирования пикового вертикального ускорения использует информацию оцененного времени осуществления обнаруженных переходов из положения сидя в положение стоя (например, оцененные моменты времени начала и окончания) для обнаруженных переходов из положения сидя в положение стоя.
Вследствие этого, блок 30 определяет время осуществления перехода из положения сидя в положение стоя и принимает вводы от блока 22, который оценивает вариацию ускорения и профиль вертикального ускорения после фильтрации согласованным фильтром, vert_acc_matfilt.
В простом варианте осуществления, s1 и s2 используются для идентифицирования начала и окончания перехода из положения сидя в положение стоя в целях идентифицирования пикового вертикального ускорения.
Однако, как будет известно специалистам в данной области техники, согласованный фильтр вносит задержку, которая относится к числу отводов фильтра. Эта задержка вызывает задержку возможного перехода из положения сидя в положение стоя по отношению к действительному наступлению перехода из положения сидя в положение стоя в сигнале vert_acc_matfilt. Вследствие этого, в некоторых реализациях, вывод блока 22, который оценивает вариацию ускорения, max_std_acc может быть использовано для определения действительного наступления перехода из положения сидя в положение стоя.
Во-первых, идентифицируется наиболее близкая выборка в сигнале max_std_acc до s1, чье значение меньше, чем пороговая величина. Эта пороговая величина определяет, где обнаруживается наступление действительного перехода из положения сидя в положение стоя (denoted t_start). В примерном случае, пороговая величина может равняться 0,35, но будет понятно, что могут быть использованы другие пороговые значения, меньшие, чем 1, причем конкретное значение выбирается, частично, на основе размера вычислительного окна, применяемого к сигналу. Затем, обнаруживается локальный минимум оценки вертикального ускорения (vert_acc) между s1 и s2 (другими словами, наименьшее значение vert_acc между s1 и s2). Наиболее близкая выборка после наибольшего локального минимума оценки вертикального ускорения, чье значение больше, чем пороговое значение, которое в конкретной реализации основано на гравитации (т.е. 9,8 мс-2), задается как окончание действительного перехода из положения сидя в положение стоя (t_end). Сплошные черные полоски на Фиг. 8(b) и соответствующие круги на Фиг. 8(a) указывают t_start и t_end для каждого действительного перехода из положения сидя в положение стоя. Значения для t_start и t_end для каждого обнаруженного перехода из положения сидя в положение стоя выводятся блоком 30 и используются для определения поднабора выборок, которые анализируются для определения пикового вертикального ускорения.
Вследствие этого предусматривается способ и устройство, которые могут оценивать риск падения для пользователя посредством анализа перехода из положения сидя в положение стоя, и в частности посредством оценки пикового вертикального ускорения, генерируемого пользователем при выполнении перехода из положения сидя в положение стоя.
Хотя данное изобретение было проиллюстрировано и описано подробно на чертежах и вышеприведенном описании, такую иллюстрацию и описание следует считать иллюстративными и примерными, а не ограничивающими; данное изобретение не ограничено раскрытыми вариантами осуществления.
Изменения в раскрытых вариантах осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, исходя из эскизов чертежей, разглашения и прилагаемой формулы изобретения. В формуле изобретения, слово "содержащий" не исключает других элементов или этапов, и указание единственного числа не исключает их множественности. Одиночный процессор или другой блок может выполнять функции нескольких элементов перечисленных в формуле изобретения.
Сам факт, что некоторые меры перечислены в обоюдно разных зависимых пунктах формулы изобретения, не указывает на то, что сочетания этих мер нельзя использовать с пользой. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе или как часть других аппаратных средств, но также может распространяться в других формах, таких как посредством Интернета или других проводных или беспроводных телекоммуникационных систем. Любые ссылочные обозначения в формуле изобретения не следует толковать как ограничивающие объем.




Группа изобретений относится к медицине, оценке риска падения пользователя при сердечно-сосудистых, двигательных, неврологических нарушениях. При осуществлении способа анализируют измерения ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя. Только если стандартное отклонение, вариантность или диапазон множества измерений ускорения, возникающего в период времени до начала перехода из положения сидя в положение стоя, меньше, чем пороговое значение, оценивают ускорение из-за гравитации как среднюю величину из множества измерений ускорения, возникающего в период времени. Идентифицируют пиковое вертикальное ускорение пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя. При этом идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя в период времени. Оценивают риск падения для пользователя исходя из масштабированного пикового вертикального ускорения. Для осуществления способа используют носитель информации, содержащий компьютерную программу, которая при исполнении на компьютере или процессоре побуждает компьютер или процессор определить риск падения для пользователя, систему, содержащую стабилометрическую платформу для измерения сил, варианты устройства, содержащие блок обработки, акселерометр, который измеряет ускорение, действующее на устройство в трех измерениях, с возможностью ношения устройства пользователем. Группа изобретений обеспечивает точность оценки риска падения и комфорт пользователя. 6 н. и 6 з.п. ф-лы, 9 ил.
1. Способ оценивания риска падения пользователя, причем способ содержит этапы, на которых:
анализируют измерения ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя;
только если стандартное отклонение, вариантность или диапазон множества измерений ускорения, возникающего в период времени до начала перехода из положения сидя в положение стоя, меньше, чем пороговое значение, оценивают ускорение из-за гравитации как среднюю величину из множества измерений ускорения, возникающего в период времени;
идентифицируют пиковое вертикальное ускорение пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя, при этом идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя в период времени; и
оценивают риск падения для пользователя исходя из масштабированного пикового вертикального ускорения.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
- вычитают оцененное ускорение из-за гравитации из идентифицированного пикового вертикального ускорения, чтобы получить масштабированное пиковое вертикальное ускорение.
3. Способ по п. 1, дополнительно содержащий этапы, на которых:
- вычитают оцененное ускорение из-за гравитации из измерений ускорения пользователя, чтобы получить масштабированные измерения ускорения пользователя;
при этом этап идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя содержит этап, на котором идентифицируют пиковое вертикальное ускорение пользователя исходя из масштабированных измерений ускорения.
4. Способ по одному из пп. 1-3, в котором масштабированное пиковое вертикальное ускорение нормализуют с использованием оценки гравитации и нормализованное масштабированное пиковое вертикальное ускорение используется для оценивания риска падения для пользователя.
5. Способ по одному из предыдущих пунктов, содержащий выполнение этапа, на котором осуществляют идентифицирование для множества переходов из положения сидя в положение стоя, и в котором этап оценивания риска падения содержит этап, на котором определяют риск падения исходя из средней величины пиковых вертикальных ускорений, идентифицированных для множества переходов из положения сидя в положение стоя.
6. Способ по п. 5, в котором этап оценивания риска падения содержит этап, на котором определяют риск падения исходя из средней величины пиковых вертикальных ускорений, идентифицированных для множества переходов из положения сидя в положение стоя, и указания числа раз, когда пользователь выполнил переход из положения сидя в положение стоя в точно определенный период времени.
7. Способ по одному из предыдущих пунктов, дополнительно содержащий этап, на котором:
- сравнивают оцененный риск падения с одним или более ранее оцененными рисками падения для определения тенденции риска падения для пользователя.
8. Носитель информации, содержащий компьютерную программу, которая при исполнении на компьютере или процессоре побуждает компьютер или процессор определить риск падения для пользователя посредством
- анализирования измерений ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя;
- только если стандартное отклонение, вариантность или диапазон множества измерений ускорения, возникающего в период времени до начала перехода из положения сидя в положение стоя, меньше, чем пороговое значение, оценивания ускорения из-за гравитации как средней величины из множества измерений ускорения, возникающего в период времени;
- идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя, при этом идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя в период времени; и
- оценивания риска падения для пользователя исходя из масштабированного пикового вертикального ускорения.
9. Устройство для оценивания риска падения для пользователя, причем устройство содержит:
- блок обработки, выполненный с возможностью:
- анализирования измерений ускорения пользователя для определения, выполнил ли пользователь переход из положения сидя в положение стоя;
- оценивания ускорения из-за гравитации как средней величины из множества измерений ускорения, возникающего в период времени до начала перехода из положения сидя в положение стоя, только если стандартное отклонение, вариантность или диапазон множества измерений ускорения, возникающего в период времени, меньше, чем пороговое значение;
- идентифицирования пикового вертикального ускорения пользователя во время перехода из положения сидя в положение стоя исходя из измерений ускорения пользователя, при этом идентифицированное пиковое вертикальное ускорение масштабируется с использованием оценки гравитации, полученной исходя из измерений ускорения пользователя в период времени; и
- оценивания риска падения для пользователя исходя из масштабированного пикового вертикального ускорения.
10. Устройство для оценивания риска падения пользователя, которое выполнено с возможностью ношения пользователем, причем устройство содержит:
- акселерометр, который измеряет ускорение, действующее на устройство в трех измерениях; и
- устройство по п. 9, в котором блок обработки выполнен с возможностью обработки измерений ускорения от акселерометра.
11. Система для оценивания риска падения пользователя, содержащая:
- устройство, которое выполнено с возможностью ношения пользователем, причем устройство содержит акселерометр, который измеряет ускорение, действующее на устройство в трех измерениях; и
- базовый блок, который выполнен с возможностью осуществления связи с устройством и содержит устройство по п. 9, в котором блок обработки выполнен с возможностью обработки измерений ускорения от акселерометра.
12. Система для оценивания риска падения пользователя, содержащая:
- стабилометрическую платформу; и
- базовый блок, который содержит устройство по п. 9, в котором блок обработки выполнен с возможностью приема измерений сил от стабилометрической платформы и обработки измерений сил для определения измерений ускорения.
| US 8206325 В1, 26.06.2012 | |||
| СИСТЕМА И СПОСОБ ДЛЯ МЕДИЦИНСКОГО МОНИТОРИНГА И ОБРАБОТКИ ПОСРЕДСТВОМ КОСМЕТИЧЕСКОГО МОНИТОРИНГА И ОБРАБОТКИ | 2006 |
|
RU2385669C2 |
| Гибочный станок | 1958 |
|
SU122009A1 |
| WO 2010035187 A1, 01.04.2010 | |||
| WO 0228282 A1, 11.04.2002 | |||
| REDMOND SJ | |||
| Automatic segmentation of triaxial accelerometry signals for falls risk estimation | |||
| Conf Proc IEEE Eng Med Biol Soc | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

