ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу и устройству для идентификации переходов пользователя между положением сидя и положением стоя из измерений движения пользователя.
УРОВЕНЬ ТЕХНИКИ
Падения являются одним из самых больших факторов риска для здоровья для пожилых людей. Около трети пожилых людей в возрасте старше 65 падают по меньшей мере один раз в год.
Многих из этих падений можно избежать посредством раннего выявления риска падения и применения эффективных и целевых программ профилактики падений. Испытания средств профилактики падений, основанных на тренировке мышечной силы и равновесия (SBT), показали, что риск падения для пожилых людей может быть снижен.
Важным параметром для оценки риска падения является объем повседневной деятельности. Для немощных пожилых людей, которые составляют большую часть населения с высоким риском падения, количество времени, которое они проводят «на ногах » (т.е. при ходьбе, стоя и т.д.) в течение одного дня, дает полезные сведения о риске их падения. Параметр «продолжительность-пребывания-на-ногах» соответствует количеству времени, которое человек тратит на конкретную деятельность, которая выполняется с опорой на ноги, или находится в положениях, связанных с опорой на ноги, таких как регулярные/нерегулярные прогулки пешком, стояние и т.д. С другой стороны, «продолжительность-пребывания-не-на-ногах» соответствует количеству времени, которое человек которое человек тратит на деятельность, которая выполняются не с опорой на ноги, или находится в положениях, не связанных с опорой на ноги, таких как лежа, сидя и т.д. Непрерывный или регулярный мониторинг и анализ «продолжительности-пребывания-на-ногах» для конкретного человека в ситуациях повседневной жизни является дополнением к стандартным тестам на состояние здоровья для точной и надежной оценки риска падения.
Однако надежная оценка повседневной активности или продолжительности-пребывания-на-ногах является трудной. Наиболее общеупотребительный подход состоит в том, что человек сам записывает свою активность. Однако самостоятельное предоставление сведений обладает большим количеством недостатков и, как правило, дает недостоверную и недостаточную информацию для точной оценки.
Хотя недавняя разработка технологии измерения на-теле обеспечивает объективные показатели повседневной активности, многие имеющиеся в настоящее время продукты в состоянии только обнаруживать и контролировать динамическую активность, такую как бег и регулярные прогулки пешком, которая не является значимой при анализе повседневной жизни немощного населения. Некоторые продукты, которые обеспечивают анализ положений, действительно существуют, но они требуют того, чтобы пользователь носил датчики на неудобных местах, таких как бедра. Идеально, чтобы получить хорошее соответствие при использовании инструмента оценки, платформа датчика должна быть расположена на верхней части туловища в виде носимого подвесного пульта управления или подобного устройства. Однако трудно обнаружить положения, такие как сидя и стоя, от сигналов движения, полученных с помощью устройства в этих положениях.
Следовательно, существует необходимость в способе и устройстве, которые могут из измерений движения пользователя выявить, когда пользователь перешел из положения сидя в положение стоя и наоборот. Идентификация этих изменений положения позволяет оценить продолжительность-пребывания-на-ногах для пользователя. Продолжительность-пребывания-на-ногах может быть суммой всех периодов времени, когда определяется, что пользователь не сидит или не лежит, например, следующих за переходом из положения сидя в положение стоя до следующего перехода от положения стоя в положение сидя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения, предложен способ идентификации переходов между положением стоя и положением сидя пользователя, при этом способ содержит получение измерений ускорения, испытываемого пользователем во время движения; получение сигнала, указывающего высоту части тела пользователя во время движения; обработку измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя; и определение идентифицированного возможного движения как перехода из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, и идентифицированного возможного движения как перехода из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале.
В некоторых вариантах осуществления этап получения сигнала, указывающего высоту, включает в себя получение сигнала путем обработки выходного сигнала датчика давления воздуха, который прикреплен к пользователю.
В альтернативных вариантах осуществления, этап получения сигнала, указывающего высоту, включает в себя получение сигнала путем обработки измерений ускорения, испытываемого пользователем во время движения.
В некоторых вариантах осуществления этап получения измерений вертикального ускорения, испытываемого пользователем во время движения, включает в себя получение измерений ускорения, испытываемого пользователем во время движения, в трех измерениях; и обработку измерений ускорения для того, чтобы оценить вертикальное ускорение, испытываемое пользователем.
В некоторых вариантах осуществления этап обработки измерений содержит вычисление нормы измерений.
Предпочтительно, этап обработки измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя содержит сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения-к-стоянию.
В предпочтительных вариантах осуществления этап сопоставления измерений ускорения с заданным профилем ускорения для перехода от сидения-к-стоянию содержит фильтрацию измерений ускорения с помощью заданного профиля ускорения для того, чтобы произвести отфильтрованный в прямом направлении сигнал; переворот в обратном направлении отфильтрованного в прямом направлении сигнала; и фильтрацию перевернутого сигнала с помощью заданного профиля ускорения.
Предпочтительно, чтобы этап обработки измерений ускорения дополнительно включал в себя фильтрацию сигнала, являющегося результатом этапа сопоставления, с помощью фильтра, который повышает амплитуду частей сигнала, которые соответствуют переходам от сидения-к-стоянию и от стояния-к-сидению, и который подавляет амплитуду частей сигнала, которые соответствуют ходьбе пользователя.
В некоторых вариантах осуществления этап фильтрации включает в себя (a) для подмножества замеров в окне сигнала, являющегося результатом этапа сопоставления: (i) определение среднего значения замеров в подмножестве; (ii) вычитание определенного среднего значения из каждого из замеров подмножества; (iii) определение абсолютного значения для каждого замера на выходе этапа (ii); (iv) определение среднего значения замеров на выходе этапа (iii); (b) перемещение окна по сигналу, полученному в результате этапа сопоставления, и повтор этапа (a); и (c) определение скользящего среднего значения сигнала, полученного на этапе (b) для формирования отфильтрованного сигнала.
В альтернативных вариантах осуществления этап фильтрации включает в себя (а) для подмножества замеров в окне сигнала, являющегося результатом этапа сопоставления: (i) вычитание значения из каждого из замеров подмножества; (ii) определение абсолютного значения каждого замера на выходе этапа (i); (iii) определение среднего значения замеров на выходе этапа (ii); (b) перемещение окна по сигналу, полученному в результате этапа сопоставления, и повтор этапа (a); и (c) определение скользящего среднего значения сигнала, полученного на этапе (b) для формирования отфильтрованного сигнала.
В некоторых вариантах осуществления этап обработки измерений ускорения дополнительно включает в себя идентификацию возможных движений в отфильтрованном сигнале, такие как пики в отфильтрованном сигнале. В этих вариантах осуществления, возможное движение предпочтительно идентифицируется там, где пик имеет амплитуду большую, чем пороговое значение.
Этап обработки измерений ускорения для идентификации возможных движений, соответствующий переходам между положением стоя и положением сидя может дополнительно содержать оценку времен начала и завершения для каждого идентифицированных возможных движений как времен, соответствующих замерам в обе стороны от соответствующего пика в отфильтрованном сигнале, если амплитуды замеров равны заданной части порогового значения.
В конкретных вариантах осуществления способ дополнительно содержит этап в определения изменения высоты для каждого возможного движения из полученного сигнала высоты посредством определения высоты до возможного движения как среднего по высоте части тела пользователя по окну, охватывающему замеры в сигнале высоты до оцененного времени начала для возможного движения; определения высоты после возможного движения как среднего по высоте части тела пользователя по окну, охватывающему замеры в сигнале высоты после оцененного времени завершения для возможного движения; и вычитания определенной высоты до возможного движения из определенной высоты после возможного движения, чтобы дать изменение высоты во время возможного движения.
В соответствии со вторым аспектом изобретения, предлагается способ определения продолжительности-пребывания-на-ногах для пользователя, причем способ включает в себя идентификацию перехода между положением пользователя стоя и положением сидя как описано выше; определение того, когда пользователь находится на ногах, как периодов времени после перехода из положения сидя в положение стоя до следующего перехода из положения стоя в положение сидя; и суммирование продолжительности каждого из периодов времени для того, чтобы выдать продолжительность-пребывания-на-ногах.
В соответствии с третьим аспектом изобретения, предлагается способ определения риска падения для пользователя, причем способ включает в себя определение продолжительности-пребывания-на-ногах как описано выше; и определение риска падения для пользователя из определенной продолжительности-пребывания-на-ногах.
В соответствии с четвертым аспектом изобретения, предоставляется компьютерный программный продукт, включающий в себя компьютерный программный код, который при выполнении на компьютере или процессоре, предписывает компьютеру или процессору идентифицировать переход между положением стоя и положением сидя в измерениях движения пользователя в соответствии с любым из способов, описанных выше.
В соответствии с пятым аспектом изобретения, предоставляется устройство для идентификации перехода между положением стоя и положением сидя в измерениях движения пользователя, причем устройство содержит блок обработки, выполненный с возможностью обработки измерений ускорения, испытываемого пользователем для того, чтобы идентифицировать возможные движения, соответствующие переходу между положением стоя и положением сидя; и определения идентифицированного возможного движения как перехода из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, указывающем высоту части тела пользователя во время движения, и определения идентифицированного возможного движения как перехода из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале, указывающем высоту части тела пользователя.
Также рассматриваются, различные другие варианты осуществления устройства, в которых блок обработки данных дополнительно выполнен с возможностью выполнения любого из описанных выше этапов способа.
В соответствии с шестым аспектом изобретения, предоставляется устройство, которое выполнено с возможностью ношения пользователем, при этом устройство содержит акселерометр, который измеряет в трех измерениях ускорение, оказывающее влияние на устройство; и устройство как описано выше, в котором блок обработки выполнен с возможностью обработки измерений ускорения от акселерометра.
В соответствии с седьмым аспектом изобретения, предлагается система, которая содержит устройство, которое выполнено с возможностью ношения пользователем, при этом устройство содержит акселерометр, который измеряет в трех измерениях ускорение, оказывающее влияние на устройство; и базовый блок, который выполнен с возможностью взаимодействия с устройством, и который содержит устройство как описанное выше, в котором блок обработки выполнен с возможностью обработки измерений ускорения от акселерометра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения теперь будут описаны, только в качестве примера, со ссылкой на следующие чертежи, на которых:
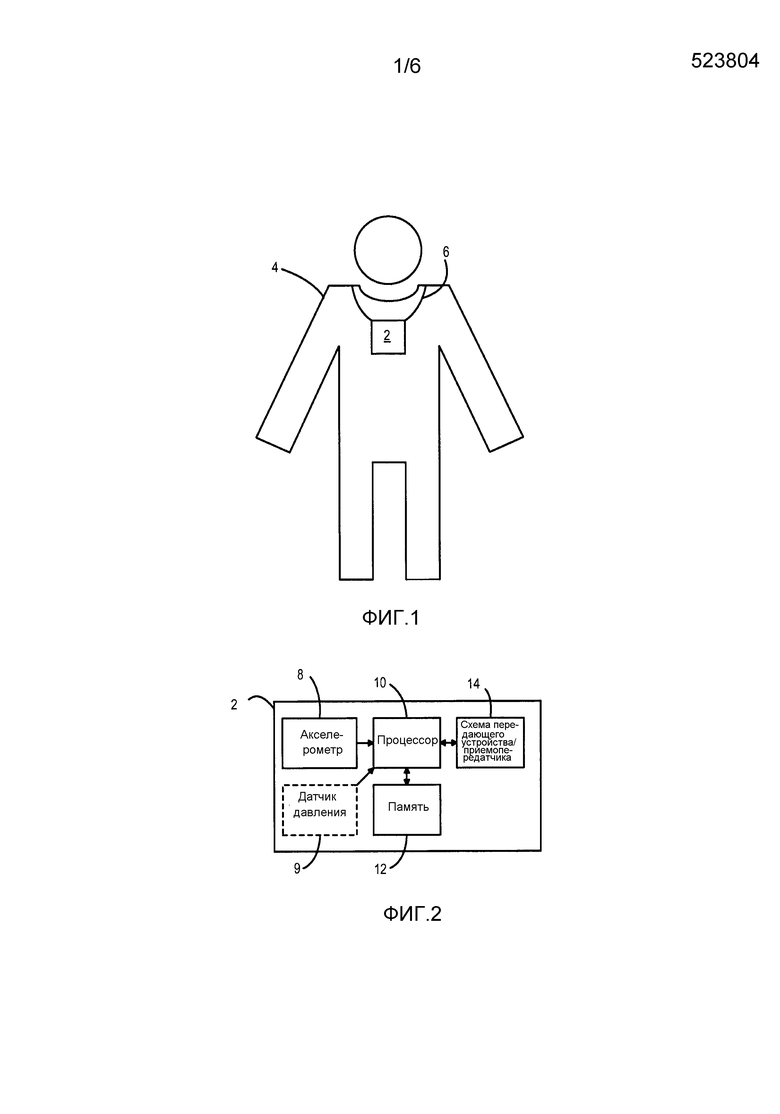
На Фиг. 1 показан блок датчика в соответствии с вариантом осуществления изобретения, прикрепленный к пользователю;
На Фиг. 2 представлена блок-схема блока датчика в соответствии с вариантом осуществления изобретения;
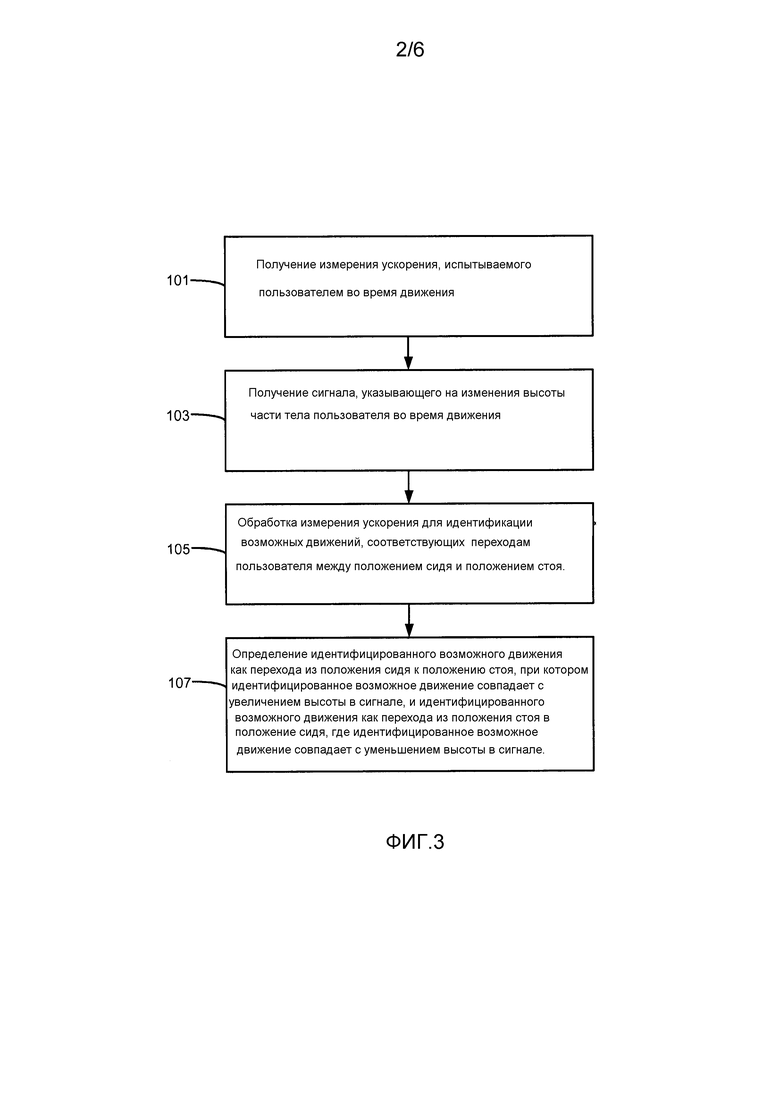
На Фиг. 3 представлена блок-схема, иллюстрирующая способ идентификации переходов положения из измерений движения пользователя;
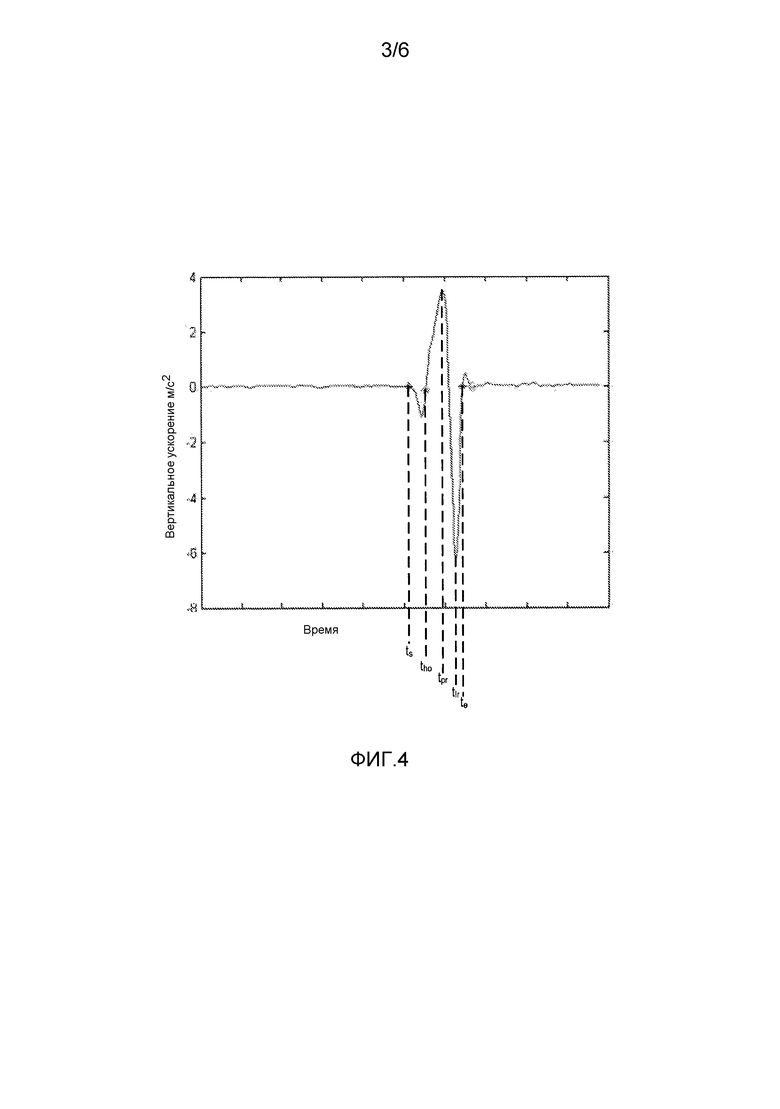
На Фиг. 4 представлен график, иллюстрирующий пример изменения вертикального ускорения во время перехода от сидения-к-стоянию;
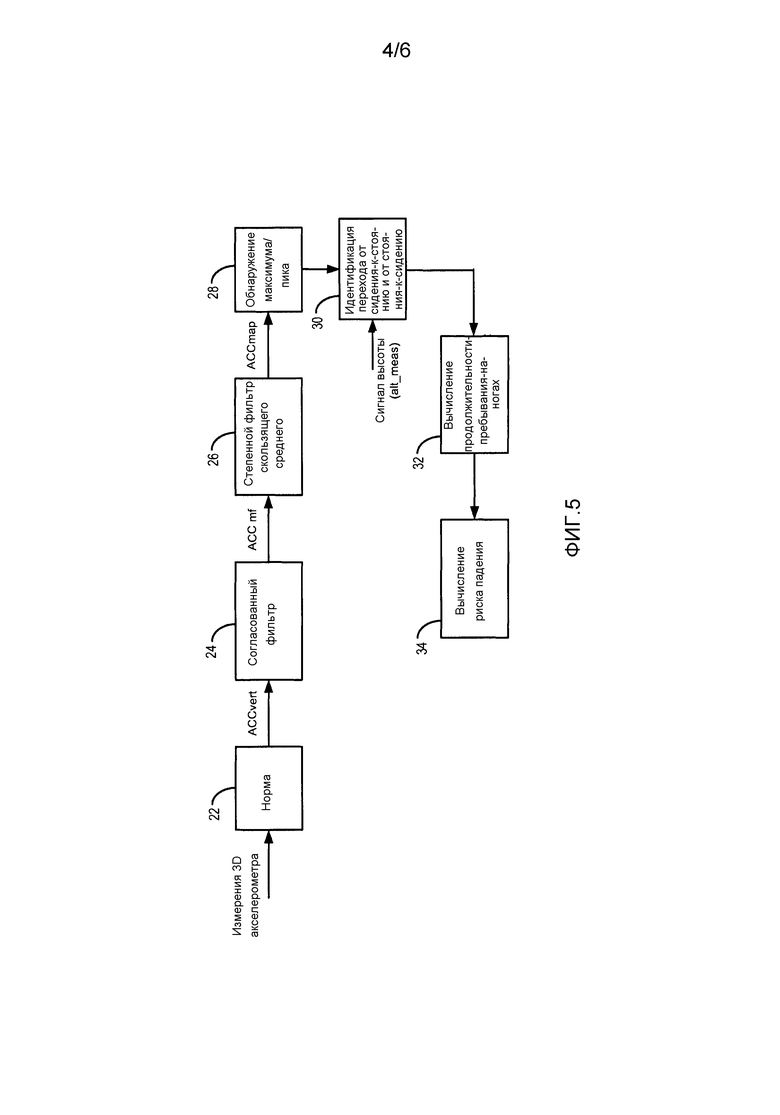
На Фиг. 5 представлена блок-схема, иллюстрирующая алгоритм обнаружения переходов от сидения-к-стоянию и от стояния-к-сидению;
На Фиг. 6 представлена серия графиков, отражающих сигналы на различных этапах алгоритма обработки в Фиг. 5; и
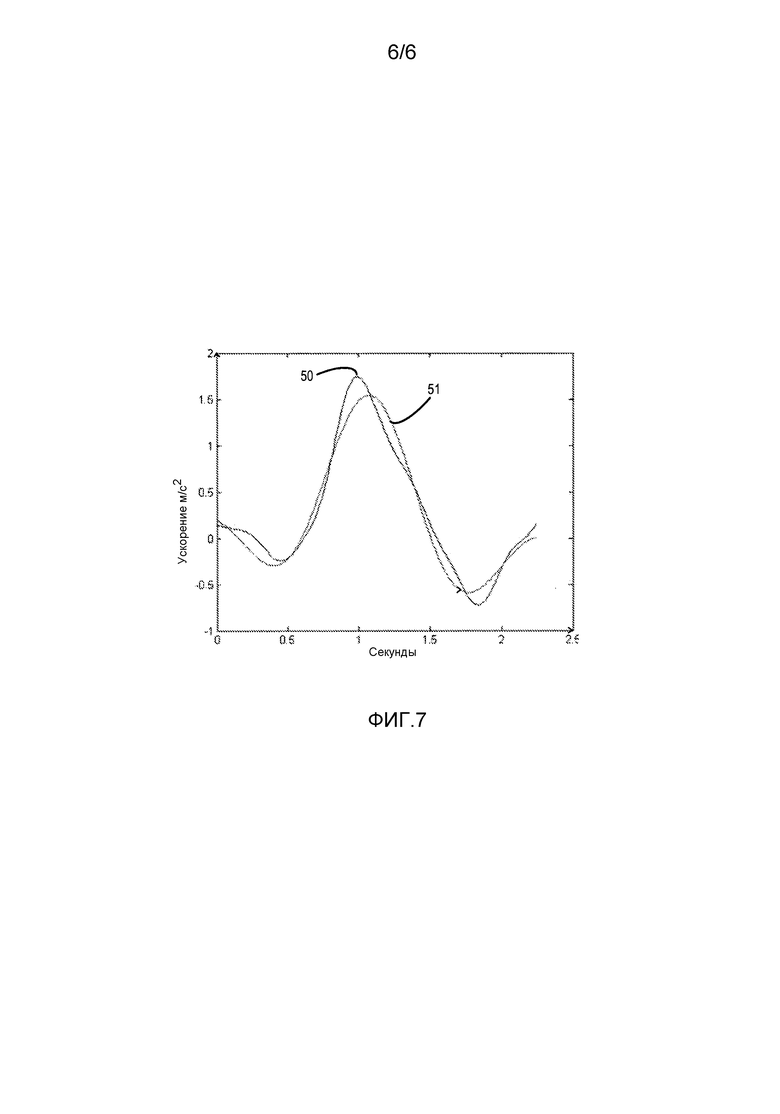
Фиг. 7 иллюстрирует примерный согласованный фильтр, который был оптимизирован для использования при обнаружении перехода от сидения-к-стоянию.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на Фигуре 1, изобретение предоставляет устройство в виде блока 2 датчика, который должен носить пользователь 4. В показанном варианте осуществления блок 2 датчика предоставляется в виде подвески с шейным шнуром 6 для размещения на шее пользователя. Альтернативно, блок 2 датчика может быть выполнен с возможностью ношения на другой части тела пользователя, такой как туловище, таз или грудь, и будет включать в себя подходящее средство для крепления блока 2 датчика к той части тела (например, ремень или пояс, если блок 2 прикреплен к тазу или груди).
Блок 2 датчика используется для измерения движения пользователя 4 и обработки результатов измерений для определения, когда пользователь 4 изменил позу из положения сидя в положение стоя (также называемое здесь как «переход от сидения-к-стоянию») и из положения сидя в положение стоя (также называемое здесь как «переход от стояния-к-сидению»). В данном контексте, положение «стоя» соответствует любому положению, в котором пользователь находится на ногах (т.е. осуществляя деятельность, которая выполняется с опорой на ноги), и включает в себя ходьбу/бег, а также стояние на месте. Таким образом, можно использовать блок 2 датчика для обработки измерений для того, чтобы определить, когда пользователь 4 выполнил простое изменение положения от сидения-к-стоянию в вертикальном положении, а также изменение положения из положения сидя к ходьбе (и наоборот). В некоторых вариантах осуществления блок 2 датчика также используется для определения продолжительности-пребывания-на-ногах для пользователя из измерений движения тела пользователя 4, и, при необходимости, также для указания на риск падения для пользователя 4 из определенной продолжительности-пребывания-на-ногах.
В альтернативных реализациях некоторые или все обработки измерений, определение продолжительности-пребывания-на-ногах и указание на риск падения могут быть выполнены в базовом блоке, который является отдельным от блока 2 датчика, носимого пользователем 4 (не показан на Фигуре 1). В этом случае, блок 2 датчика может передавать измерения движения или информацию о выявленных изменениях положения базовому блоку с помощью проводного или беспроводного соединения.
На фигуре 2 показан вариант осуществления блока 2 датчика в соответствии с изобретением. Блок 2 датчика включает в себя акселерометр 8, который измеряет ускорение вдоль трех ортогональных осей (и, который выводит соответствующие сигналы, указывающие на ускорение вдоль каждой из осей) и дополнительный датчик 9, который измеряет высоту над уровнем моря или высоту блока 2 датчика над землей (или более конкретно, который измеряет изменения высоты над уровнем моря или высоты блока 2 датчика над землей, или позволяет измерить их изменения). Датчик 9 для измерения высоты над уровнем моря или высоты блока 2 датчика может содержать, например, высотомер или датчик давления воздуха, хотя специалисты в данной области техники будут знать о других типах датчиков, которые можно использовать. В некоторых вариантах осуществления измерения от акселерометра 8 могут быть обработаны для определения высоты блока 2 датчика над землей, или для определения изменения высоты блока 2 датчика. Выходные сигналы от акселерометра 8 и датчика 9 (в случае если он присутствует) подаются процессору 10 для анализа.
Блок 2 датчика также содержит память 12 и схему 14 передающего устройства или приемопередатчика. Память 12 используется для сохранения результатов измерений от акселерометра 8 и датчика 9, и для хранения результатов анализа, полученных с помощью процессора 10. Схему 14 передающего устройства или приемопередатчика можно использовать для передачи результатов анализа удаленному (базовому) блоку или компьютеру, на котором они могут быть просмотрены или изучены пользователем или лечащим врачом.
В некоторых вариантах осуществления акселерометр 8 является акселерометром микроэлектронной механической системы (МЭМС). Ускорение, испытываемое акселерометром 8 можно замерять с скоростью 50 Гц, хотя следует иметь в виду, что можно использовать многие другие частоты замеров. В случае если датчик 9 является датчиком давления воздуха или высотомером, измерения высоты блока 2 датчика над землей можно замерять с частотой 1,8 Гц, хотя опять же следует иметь в виду, что можно использовать многие другие частоты замеров.
В зависимости от конкретного типа используемого датчика для датчика 9 для измерения высоты, датчик 9 может выдавать сигналы, указывающие высоту над землей (или уровнем моря, в случае датчика давления воздуха), и в этом случае временные ряды измерения высоты могут быть проанализированы с помощью процессора 10 для того, чтобы определить изменение высоты от одного экземпляра измерения (замера) к следующему (или в течение заданного числа экземпляров измерений). Альтернативно, датчик 9 может непосредственно выводить указание на изменение высоты блока 2 датчика из предыдущего или ранее определенного экземпляра измерения.
В варианте осуществления изобретения, измерения, собранные с помощью акселерометра 8 и датчика 9, анализируются процессором 10 в устройстве 2 датчика для того, чтобы определить случаи переходов от сидения-к-стоянию и от стояния-к-сидению, и необязательно продолжительность-пребывания-на-ногах и риск падения. Альтернативно, измерения от акселерометра 8 и датчика 9 могут быть переданы базовому блоку через схему 14 передающего устройства/приемопередатчика, с базовым блоком, анализирующим измерения, для определения возникновения перехода от сидения-к-стоянию и от стояния-к-сидению. В любом случае, обработка может быть выполнена в режиме (почти) реального времени или измерения от акселерометра 8 и датчика 9 могут быть сохранены в памяти 12 или базовом блоке для дальнейшей обработки (т.е. в автономном режиме).
На фигуре 3 показана блок-схема, иллюстрирующая этапы, необходимые для идентификации переходов между положением сидя и вертикальным положением (так например, стояние или ходьба) при измерениях движения пользователя. Во-первых (этап 101), получают измерения ускорения, испытываемого блоком 2 датчика (и, следовательно, пользователем 4, так как пользователь носит блок 2 датчика). Во-вторых (этап 103), получают сигнал, указывающий на изменения высоты части тела пользователя. Как указано выше, этот сигнал может быть получен от датчика давления воздуха или высоты, или он может быть получен путем обработки измерения ускорения для определения абсолютной высоты или изменений высоты пользователя.
Измерения ускорения и высоты (или изменений высоты) на этапах 101 и 103 получают по существу в тот же период времени.
Далее, на этапе 105, измерения ускорения обрабатываются для идентификации движений по измерениям, которые могут соответствовать переходам пользователя 4 от сидения-к-стоянию и переходам от стояния-к-сидению. Части измерения акселерометра (т.е. последовательность экземпляров измерения), которые идентифицируются на этом этапе, как возможно соответствующие переходам от сидения-к-стоянию и от стояния-к-сидению, называют «возможными движениями».
В предпочтительном варианте осуществления изобретения, как описано более подробно ниже, возможные движения идентифицируются путем сопоставления измерений ускорения с профилем ускорения, которое, как ожидается, произойдет в течение перехода от сидения-к-стоянию.
График на Фигуре 4 показывает ускорение, измеренное в вертикальном направлении в течение типичного движения от сидения-к-стоянию. Пользователь 4 начинает из состояния покоя (т.е. измеренное ускорение в вертикальном направлении приблизительно 0) и пользователь начинает двигаться в момент времени ts. Ускорение, измеренное в это время, обозначается Accvert_s. Как правило, в профиле ускорения имеется небольшой минимум сразу после того, как пользователи начинают двигаться и прежде чем они встают со своих стульев. Впоследствии, бедро пользователя оставляет средство опоры (т.е. стул) в момент времени tho («ho» представляет отделение бедра), и ускорение в этот момент времени обозначено как Accvert_ho. Ускорение в вертикальном направлении затем возрастает до пика (пиковая реакция), обозначенного как Accvert_pr, возникающее в момент времени tpr. За пиковой реакцией следует минимальная реакция, которая является отрицательным ускорением, обозначаемым как Accvert_lr, возникающим в момент времени tlr. Конец движения происходит в момент времени te, с ускорением, обозначаемым как Accvert_e.
Таким образом, на этапе 105 блок-схемы, показанной на Фигуре 3, возможные движения идентифицируются путем анализа измерений акселерометра для идентификации последовательностей замеров, чей профиль соответствует или практически соответствует профилю, показанному на Фигуре 4.
На этапе 107, изменение высоты, происходящее во время или примерно во время каждого возможного движения, определяется из измерений, полученных на этапе 103, и используются для классификации возможных движений как переход от сидения-к-стоянию или от стояния-к-сидению. В частности, высота над уровнем моря до и после возможного движения анализируется для определения изменения высоты. В некоторых вариантах осуществления может быть найдено среднее или медианное значение высоты внутри окна (например, длительностью в 1 секунду) перед и после возможного движения и найдена разница. Затем возможное движение идентифицируется как переход от сидения-к-стоянию, когда это происходит одновременно (или достаточно близко по времени) с увеличением высоты, и возможное движение идентифицируется как переход от стояния-к-сидению, когда это происходит одновременно (или достаточно близко по времени) с уменьшением высоты. В некоторых вариантах осуществления для того, чтобы классифицировать возможное движение как переход от сидения-к-стоянию или от стояния-к-сидению, увеличение или уменьшение высоты должно быть в пределах заданного диапазона. Заданный диапазон охватывает изменения высоты, которые, как ожидается, произойдут во время или примерно во время типичного перехода от сидения-к-стоянию и перехода от стояния-к-сидению, которые, например, могут соответствовать, в большинстве случаев, длине бедра пользователя. В этом случае, нижняя граница диапазона может составлять, например, около 0,1 или 0,2 метра, и верхняя граница диапазона может быть установлена, например, на значении 0,6, 0,75, 0,8 или 1 метра. Следует иметь в виду, что порог может быть персонифицированным по высоте или длине бедра пользователя и может быть установлен с учетом разрешения измерений высоты или высоты над уровнем моря, предоставляемых датчиком 9.
Также следует иметь в виду, что переходы от сидения-к-стоянию и от стояния-к-сидению могут альтернативно быть определены путем сравнения изменения высоты с пороговым значением, с переходами, которые идентифицируются, в случае если изменение высоты превышает пороговое значение. В этом случае, порог может соответствовать нижней границе для заданного диапазона, описанного выше. Однако это вариант осуществления может привести к более высокой доле ложных положительных идентификаций, чем диапазон в варианте осуществления, описанном выше, поскольку активности, такие как подъем или спуск по лестнице могут быть идентифицированы как переход от сидения-к-стоянию или от стояния-к-сидению (в то время это движение не будет учтено как возможный переход от сидения-к-стоянию или от стояния-к-сидению на верхней границе 0,6-1 метр в диапазоне варианта осуществления).
Алгоритм, иллюстрирующий обнаружение переходов от сидения-к-стоянию и от стояния-к-сидению в соответствии с конкретным вариантом осуществления изобретения показан на Фигуре 5. Алгоритм берет в качестве входа трехмерный сигнал ускорения, измеренный с помощью акселерометра 8 (который содержит отдельный сигнал для каждой из трех осей акселерометра 8) и сигнал, указывающий на изменение высоты блока 2 датчика/пользователя 4 с течением времени. Как указано выше, сигнал, указывающий на изменение высоты блока 2 датчика/пользователя 4, может быть получен с использованием датчика 9 давления воздуха или высоты, или он может быть оценен из сигнала ускорения (например, дважды интегрируя вертикальную составляющую ускорения для того, чтобы выдать высоту или изменение высоты).
Для полноты ниже описывается примерная методика обработки сигнала от датчика давления воздуха для того, чтобы получить сигнал изменения высоты.
Во-первых, необработанный сигнал pt давления воздуха принимается от датчика 9 давления воздуха. Как упоминалось ранее, давление воздуха можно замерять с частотой 1,8 Гц (или в любом случае при более низкой частоте выборки, чем сигналы ускорения). Таким образом, во-первых увеличивают частоту выборки сигнала pt давления воздуха в соответствии с частотой выборки (например, 50 Гц) сигналов ускорения (сигнал давления при повышенной частоте выборки, обозначается pt’). Высоту в момент времени t (обозначается alt_t) можно оценить из измерений датчика давления воздуха, используя уравнение 1 ниже:
alt_t=44330 * (1-pt’/101325)0,19 (1)
Уравнение (1) выводится из функции преобразования давления воздуха в высоту, показанной в уравнении (2):
 (2)
(2)
где:
Полученный в результате сигнал высоты затем сглаживается, например, с помощью медианного фильтра или фильтра скользящего среднего, имеющего заданную длину, например, из около 3 секунд, или фильтра нижних частот Баттерворта. В предпочтительных вариантах осуществления можно использовать фильтр Баттерворта 2-го порядка с частотой среза 2 Гц, так как это делает возможным получение удовлетворительного качества траектории перехода, проделанной пользователем (хотя это требует датчика давления воздуха, который работает с более высокой частотой дискретизации, например, 10 Гц или выше). Фильтр применяется к временным рядам оцененных высот над уровнем моря, давая в результате сглаженный сигнал высоты alt_meas, который показан на Фигуре 6(а).
Следует иметь в виду, что в альтернативных вариантах осуществления изобретения, где используется другой тип датчика высоты над уровнем моря, высоты или изменения высоты, в связи с этим упомянутая выше обработка может быть адаптирована или опущена.
Кроме того, хотя это не показано на Фигуре 5, измерения ускорения от акселерометра 8 (т.е. три сигнала, представляющие ускорение, измеренное вдоль соответствующей оси 3D акселерометра 8) могут быть предварительно обработаны прежде, чем будут подаваться на вход основных этапов обработки согласно изобретению. Например, три сигнала могут быть подвергнуты низкочастотной фильтрации для удаления шума, который мог бы повлиять на точность последующей обработки. В некоторых случаях, фильтр нижних частот Баттерворта с частотой среза 2 Гц применяется к сигналам от каждой из трех осей акселерометра 8. Альтернативно, могут быть применены различные характеристики фильтров, такие как у фильтра нижних частот Чебышева или у фильтров других типов, известных специалистам в данной области техники. Следует также иметь в виду, что частота среза 2 Гц может варьироваться в зависимости от конкретных характеристик шума от акселерометра 8.
При старте алгоритма, показанного на Фигуре 5, измерения от 3D акселерометра (или отфильтрованные измерения, описанные выше), обрабатываются для оценки вертикального ускорения. В предпочтительных вариантах осуществления оценка вертикального ускорения определяется путем принятия нормы 3D-сигнала ускорения. Вычисление вертикального ускорения требуется потому, что, когда блок 2 датчика выполнен в виде подвески, он может свободно перемещаться на месте груди. Таким образом, в предпочтительных вариантах осуществления сигнал 3D акселерометра (или отфильтрованные измерения, описанные выше) вводятся в блок 22 вычисления нормы. Блок 22 вычисления нормы вычисляет норму для каждого экземпляра в 3D сигнале ускорения, т.е.

где ACCx(i), ACCy(i) и ACCz(i) компоненты ускорения по осям x, y и z акселерометра 8 соответственно для i-го замера.
Следует иметь в виду, что в альтернативных вариантах осуществления могут использоваться иные способы определения вертикального ускорения от 3D сигнала ускорения.
На Фигуре 6(b) паказан примерный сигнал, представляющий норму 3D сигнала ускорения, полученного из измерений блоком 2 датчика для пользователя 4, который выполнял переход от сидения-к-стоянию (с меткой «встал» на Фигуре 6), ходьбу на 3 метра и затем снова сел (с меткой «сел» на Фигуре 6), что было повторено три раза. На Фигуре 6(b) можно видеть, что имеются три отдельные области активности, представленные в этом сигнале.
Нормированный сигнал ускорения (или оценка вертикального ускорения, полученного другими методами), ACCvert, подается на вход блока 24 фильтра, который соответствует сигналу ACCvert с заданным шаблоном, представляющим ускорение, которое, как ожидается, возникнет в течение перехода от сидения-к- стоянию.
В предпочтительном варианте осуществления блок 24 применяет согласованный фильтр, имеющий импульсную характеристику, которая аппроксимирует ускорение, испытываемое во время перехода от сидения-к-стоянию, в сигнале (ACCvert) вертикального ускорения, выводимого из блока 22 вычисления нормы. Для идентификации как переходов от сидения-к-стоянию, так и от стояния-к-сидению, используя согласованный фильтр, сигнал на Фигуре 6(b) сначала фильтруется с помощью согласованного фильтра в прямом направлении. Затем отфильтрованный сигнал переворачивается и снова фильтруется с помощью согласованного фильтра для того, чтобы выдать сигнал на Фигуре 6(c). Отфильтрованный сигнал обозначен как ACCmf и показан на Фигуре 6(c). ACCmf сохраняет тот шаблон в сигнале, который соответствует эталонному изображению, показанному на Фигуре 7, а подавляет те, которые не совпадают. Вывод согласованного фильтра 24 представляет собой набор коэффициентов, которые указывают на совпадение измерений с шаблоном. Каждый коэффициент отражает совпадение ряда последовательных экземпляров измерений (охватывающих период времени такой же продолжительности, что и заданный шаблон) с заданным шаблоном. Чем выше коэффициент, тем лучше совпадение измерений с шаблоном (и, следовательно, больше шанс того, что произошел переход от сидения-к-стоянию или переход от стояния-к-сидению).
В предпочтительном варианте осуществления согласованный фильтр, используемый в блоке 24, может быть таким же, как показано на Фигуре 7, который был оптимизирован для обнаружения перехода от сидения-к-стоянию. Согласованный фильтр, показанный на Фигуре 7, исключает ускорение силы тяжести (9,8 м/с2). Первая кривая 50 показывает типичную картину вертикального ускорения в процессе перехода от сидения-к-стоянию. Вторая кривая 51 показывает примененную характеристику согласованного фильтра, которая аппроксимирует первую кривую 50. Следует иметь в виду, что характеристика согласованного фильтра может быть выражена с использованием многих различных функций, но в этом варианте осуществления, характеристика согласованного фильтра дается уравнением 4 ниже.
A1·sinc[W1(t-t1)]+A2·[W2(t-t2)] (4)
Эта характеристика представляет собой комбинацию двух синусоидальных функций с параметрами масштаба, определенными в масштабе p. р является вектором параметров с шестью элементами:
[A1, A2, W1, W2, t1, t2 ] (5)
Каждый элемент в р определяет различные параметры масштаба. A1 и A2 являются параметрами масштаба амплитуды, которые определяют пиковую девиацию двух синусоидальных волн соответственно. Параметры W1 и W2 являются параметрами масштаба частоты, которые определяют частоту двух синусоидальных волн. Параметры t1 и t2 являются параметрами масштаба фазы, которые определяют положение двух синусоидальных волн. Значения шести элементов вектора р параметров устанавливаются для настройки функции согласованного фильтра для характеристики 50 перехода от-сидения-к-стоянию на Фигуре 7.
Следует иметь в виду, что значения элементов вектора р параметров могут быть предоставлены с помощью многих известных методов подгонки кривой. В одном случае, желаемые параметры могут быть рассчитаны путем применения нелинейного алгоритма регрессии методом наименьших квадратов, однако многие другие виды алгоритмов хорошо известны в данной области и могут быть применены. Алгоритм регрессии методом наименьших квадратов генерирует различные комбинации параметров, соответствующих различным функциям. Сгенерированные функции затем подгоняются к набору данных требуемых шаблонов в соответствии с критерием ошибок для метода наименьших квадратов. Когда функция дает минимальное значение среднеквадратичной ошибки среди комбинаций параметров, оптимизированная подгонка считается найденной.
После согласованной фильтрации, вывод совпавшего отфильтрованного сигнала (ACCmf) блоком 24 проходит через другой блок 26 фильтра, который фильтрует сигнал ACCmf для увеличения частей сигнала, которые соответствуют переходам от сидения-к-стоянию и от стояния-к-сидению и подавляет амплитуду частей сигнала, соответствующих ходьбе пользователя.
В предпочтительном варианте осуществления блок 26 фильтра применяет степенной фильтр скользящего среднего для сигнала ACCmf. В некоторых реализациях, степенной фильтр 26 скользящего среднего работает согласно следующей функции:
sigOut (i)=mean { abs [ sigln ( i : i+wSz-1 ) -mean (sigln (i : i+wSz-1) ) ] } ;
sigOut=MA(sigOut) ;
sigln является подмножеством замеров в совпавшем отфильтрованном сигнале (ACCmf) ускорения в окне заданной длины, например, 0,75 секунды (хотя могут использоваться другие размеры окон), и wSz является числом экземпляров в скользящем окне. Длина окна, используемого функцией скользящего среднего, может иметь такую же длину, как окно, используемое для выбора входных экземпляров (sigln), например, 0,75 секунды, но альтернативно оно может другим.
Таким образом, в соответствии с этой функции, подмножество замеров в окне определяется в сигнале ACCmf (sigln) и (i) определяется среднее из замеров в подмножестве, (ii) вычитания среднего из каждого из замеров подмножества, (iii) определение абсолютного значения из результата вычисления этапа (ii), и (iv) определение из замеров среднего из результата вычисления этапа (iii). Окно перемещается по сигналу ACCmf (например, один экземпляр в каждый отдельный отрезок времени, хотя для уменьшения вычислительной нагрузки можно использовать этапы с большим окном) и вышеописанные этапы выполняются для каждого положения окна. Выходной сигнал, формируемый из скольжения окна по сигналу ACCmf и выполнения этапов, описанных выше, затем обрабатывается (сглаживается) с помощью фильтра скользящего среднего.
sigOut (или ACCmap, как показано на Фигурах 5 и 6) является выводом степенного фильтра 26 скользящего среднего, и примерный сигнал показан на Фигуре 6(d). Таким образом, можно видеть, что сигнал характеризуется рядом пиков, каждый их которых, как правило, совпадает переходом пользователя к стоянию или сидению.
В альтернативных реализациях степенной фильтр 26 скользящего среднего может работать работает согласно следующей функции:
sigOut (i) =median { abs [ sigln ( i : i+wSz-1 ) -median (sigln (i : i+wSz-1) ) ] } ;
sigOut=MA(sigOut) ;
или
sigOut (i) =median { abs [ sigln ( i : i+wSz-1 ) -Thres] };
sigOut=MA(sigOut) ;
где Thres является заданным порогом, основанным, например, на оценке гравитации, среднего или медианного значения для всех экземпляров sigln. В последней реализации фильтр 26 определяет разность между значением sigln в скользящем окне и опорным значением. Опорное значение может быть оценкой среднего или медианного значения сигнала подмножества (или всего), или заранее заданным опорным значением.
После фильтрации степенным методом скользящего среднего в блоке 26, отфильтрованный ACCmap сигнал обрабатывается для того, чтобы идентифицировать возможные движения, которые могут соответствовать переходу пользователя от сидения-к-стоянию или от стояния-к-сидению. Обработка заключается во-первых в идентификации любого пика или максимума ACCmap сигнала в блоке 28. Предпочтительно, только пики, имеющие амплитуду выше порогового значения пика, обнаруживаются в ACCmap сигнале. В примерном сигнале, показанном на Фигуре 6(d), можно увидеть шесть пиков, которые будут идентифицированы блоком 28 в качестве возможных переходов от сидения-к-стоянию или от стояния-к-сидению. Для каждого идентифицированного пика (соответствующего возможному переходу), также определяется оценка продолжительности перехода. Предпочтительно, эта оценка производится посредством идентификации замера по обе стороны от пика, где амплитуда ACCmap падает ниже части порогового значения пика (например, 50% от порога пика). Времена, соответствующие этим замерам, предоставляют оценку начального и конечного времени перехода. Выход блока 28 является показателем времен, при которых возникают максимумы или пики в отфильтрованном сигнале, полученном посредством степенного метода скользящего среднего.
Следует иметь в виду, что обработка операций, выполняемых блоком 22 вычисления нормы, блоком 24 согласованного фильтра, блоком 26 степенного фильтра скользящего среднего и блоком 28 обнаружения максимума/пика, соответствует, как правило, этапу 105 на Фигуре 3.
Как описано выше со ссылкой на этап 107, показанный на Фигуре 3, возможные переходы от сидения-к-стоянию и от стояния-к-сидению, соответствующие пикам, идентифицированным в блоке 28, классифицируются как переходы от сидения-к-стоянию, когда они возникают в то же время или примерно в то же время, как увеличение высоты блока 2 датчика, и переходы от стояния-к-сидению классифицируются как переходы от сидения-к-стоянию, когда они возникают в то же время или примерно в то же время, как и уменьшение высоты блока 2 датчика.
Таким образом, блок 30 определяет изменение высоты или высоты над уровнем моря, которое произошло в то же время или примерно в то же время, что и каждый идентифицированный возможный переход от сидения-к-стоянию и от стояния-к-сидению. В дополнение к приему указания о хронировании идентифицированных пиков от блока 28 обнаружения пика, блок 30 классификации также принимает расчетный сигнал измерения высоты над уровнем моря или высоты alt_meas.
Для каждого идентифицированного пика, блок 30 классификации определяет изменение высоты, возникающее в течение заданного периода времени пика, с помощью сигнала alt_meas измерения высоты. Таким образом, в некоторых вариантах осуществления блок 30 классификации применяет окно заданной длины к сигналу alt_meas измерения высоты приблизительно за время, за которое возникает идентифицированный пик, и определяет изменение высоты, которое возникает по всему этому окну (например, путем вычитания высоты в конце окна из высоты в начале окна, хотя специалисты в данной области техники узнают о других способах определения изменения высоты в пределах одного окна на сигнале). Например, в некоторых альтернативных реализациях, может быть найдено среднее или медианное значение высоты внутри окна (например, длительностью в 1 секунду) перед и после возможного движения и найдена разница. В любой реализации, окно может иметь длину, например, в 1 секунду, но возможны и другие длины.
Если определено, что имеется увеличение высоты примерно в то время, когда возникает идентифицированный пик, то блок 30 классификации классифицирует этот пик как переход от сидения-к-стоянию. В альтернативных вариантах осуществления, блок 30 классификации для того, чтобы классифицировать пик, как переход от сидения-к-стоянию, может требовать увеличения высоты, большего, чем пороговое значение (например, 0,1 м) или в пределах заданного диапазона (например, 0,1 м до 0,75 м).
Кроме того, если определено, что имеется уменьшение высоты примерно в то время, когда возникает идентифицированный пик, то блок 30 классификации классифицирует этот пик как переход от стояния-к-сидению. В альтернативных вариантах осуществления, блок 30 классификации для того, чтобы классифицировать пик, как переход от стояния-к-сидению, может требовать уменьшения (амплитуды) высоты, большего, чем пороговое значение (например,0,1 м) или в пределах заданного диапазона (например, 0,1 м до 0,75 м).
Следует иметь в виду, что варианты осуществления, в которых пороговое значение или заданный диапазон применяется к изменению высоты, значение порога или заданный диапазон может быть определен на основе характеристик пользователя, например, роста или длины ног.
Выводом блока 30 классификации является индикация времени или времен, в которые произошли переходы от сидения-к-стоянию и времени или времен, в которое произошли переходы от стояния-к-сидению. Эти показания используются блоком 32 вычисления «продолжительности-пребывания-на-ногах» для того, чтобы определить «продолжительность-пребывания-на-ногах» для пользователя 4.
Блок 32 вычисления определяет время, которое прошло от каждого перехода от сидения-к-стоянию к следующему переходу от стояния-к-сидению, и суммы всех прошедших времен для того, чтобы определить продолжительность-пребывания-на-ногах. Продолжительность-пребывания-на-ногах может быть суммой всех периодов времени, когда пользователь решил не сидеть или не лежать, например, следующий переход из положения сидя к положению стоя до следующего перехода из положения сидя в положение стоя. Другими словами, блок 32 вычисления из идентифицированных переходов определяет, когда пользователь находится на ногах, и определяет длину этого периода времени.
Определенная продолжительность-пребывания-на-ногах может быть предоставлена блоку 34 оценки риска падения, который определяет риск падения для пользователя 4. В простом случае, риск падения может быть напрямую связан с определенной продолжительностью-пребывания-на-ногах (например, низкие значения продолжительности-пребывания-на-ногах могут быть связаны с высоким риском падения, и наоборот), но и в других случаях, риск падения можно определить, основываясь на продолжительности-пребывания-на-ногах и других параметрах, связанных с падением, такими как те, которые связаны с устойчивостью походки пользователя или энергией, используемой при выполнении перехода от сидения-к-стоянию.
В дополнение к определению продолжительности-пребывания-на-ногах из обнаруженных переходов от сидения-к-стоянию и от стояния-к-сидению, другие движения, которые могут быть обнаружены из 3D сигнала ускорения/или сигнала высоты, такие как ходьба и т.д., можно использовать для подтверждения того, что пользователь на самом деле стоит на ногах, вслед за обнаруженным переходом от сидения-к-стоянию, и наоборот. Например, колебания сигнала ускорения можно использовать как признак движения. Если колебания ускорения выше порогового значения, вполне вероятно, что пользователь перемещается с места на место (и поэтому, вероятно, стоит на ногах). Специалисты в данной области техники узнают о других признаках, которые могут быть извлечены из сигналов ускорения для того, чтобы помочь в проверке того, стоит ли пользователь на ногах или сел.
Кроме того, специалистам в данной области техники следует иметь в виду, что такие признаки могут быть использованы блоком 30 классификации в дополнение к сигналу высоты для того, чтобы определить, является ли идентифицированное возможное движение перехода от сидения-к-стоянию или от стояния-к-сидению. Кроме того, специалистам в данной области техники следует иметь в виду, что в вариантах осуществления, которые альтернативны способу классификации, основанному на пороговом значении, описанному выше, блок 30 классификации может использовать различные линейные или нелинейные способы классификации.
Следует иметь в виду, что, в дополнение к определению возникновения переходов от сидения-к-стоянию и от стояния-к-сидению с целью определения продолжительности-пребывания-на-ногах, обнаружение одного или обоих типов переходов можно использовать как часть алгоритма обработки, который оценивает параметры таких переходов, например, включая оценки энергии, производимой пользователем при выполнении перехода от сидения-к-стоянию.
Тем самым предлагается способ и устройство, которое может идентифицировать переходы от сидения-к-стоянию и от стояния-к-сидению из измерений движения пользователя. Идентификация этих переходов затем позволяет достоверно определить продолжительность времени, которое пользователь проводит на ногах, не требуя от пользователя записывать вручную информацию о своей деятельности, и также позволяет автоматически оценить риск падения пользователя.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и предшествующем описании, такие иллюстрации и описание должны рассматриваться как иллюстративные или приведенные в качестве примера, а не ограничивающие; изобретение не ограничивается описанными вариантами осуществления.
Изучив чертежи, раскрытие и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения вариации показанных вариантов осуществления. В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа. В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с пользой. Компьютерная программа может храниться/распространяться на подходящих носителях, таких как средства оптического хранения информации или твердотельных носителях информации, поставляемых вместе или как часть других аппаратных средств, но также могут распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема формулы изобретения.

Группа изобретений относится к медицине и может быть использована для идентификации переходов между положением стоя и положением сидя пользователя. Устройство содержит постоянный машиночитаемый носитель, содержащий компьютерный программный код, который при выполнении на компьютере предписывает компьютеру выполнять способ определения переходов между положением стоя и положением сидя, причем устройство содержит: аппаратный процессор, выполненный с возможностью: обработки измерений ускорения, испытываемого пользователем для того, чтобы идентифицировать возможные движения, соответствующие переходам между положением стоя и положением сидя; определения идентифицированного возможного движения как перехода из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, указывающем высоту части тела пользователя во время движения, и определения идентифицированного возможного движения как перехода из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале, указывающем высоту части тела пользователя, при этом обработка измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя, содержит сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию, и сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию содержит: фильтрацию измерения ускорения с помощью заданного профиля ускорения для того, чтобы произвести отфильтрованный в прямом направлении сигнал; переворот в обратном направлении отфильтрованного в прямом направлении сигнала; и фильтрацию перевернутого сигнала с помощью заданного профиля ускорения. Группа изобретений обеспечивает повышение эффективности определения переходов между положением стоя и положением сидя пользователя. 3 н. и 10 з.п. ф-лы, 7 ил.
1. Способ идентификации переходов между положением стоя и положением сидя пользователя, причем способ содержит этапы, на которых:
- измеряют, с помощью акселерометра, ускорение, испытываемое пользователем во время движения, и выводят измерения ускорения;
- измеряют, с помощью датчика, высоту части тела пользователя во время движения и выводят сигнал, указывающий высоту;
- обрабатывают, с помощью аппаратного процессора, измерения ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя; и
- определяют, с помощью аппаратного процессора, идентифицированное возможное движение как переход из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, и идентифицированное возможное движение как переход из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале,
при этом этап обработки измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя, содержит сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию, и этап сопоставления измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию содержит этапы, на которых:
- фильтруют измерения ускорения с помощью заданного профиля ускорения для того, чтобы произвести отфильтрованный в прямом направлении сигнал;
- переворачивают в обратном направлении отфильтрованный в прямом направлении сигнал; и
- фильтруют перевернутый сигнал с помощью заданного профиля ускорения.
2. Способ по п. 1, в котором этап обработки измерений ускорения дополнительно содержит фильтрацию сигнала, являющегося результатом этапа сопоставления, с помощью фильтра, который повышает амплитуду частей сигнала, которые соответствуют переходам от сидения к стоянию и от стояния к сидению, и который подавляет амплитуду частей сигнала, которые соответствуют ходьбе пользователя.
3. Способ по п. 2, в котором этап фильтрации сигнала содержит:
(a) для подмножества замеров в окне сигнала, являющегося результатом этапа сопоставления:
(i) определение среднего значения замеров в подмножестве;
(ii) вычитание определенного среднего значения из каждого из замеров подмножества;
(iii) определение абсолютного значения для каждого замера на выходе этапа (ii);
(iv) определение среднего значения замеров на выходе этапа (iii);
(b) перемещение окна по сигналу, полученному в результате этапа сопоставления, и повтор этапа (a);
(c) определение скользящего среднего значения сигнала, полученного на этапе (b) для формирования отфильтрованного сигнала;
или в котором этап фильтрации содержит:
(a) для подмножества замеров в окне сигнала, являющегося результатом этапа сопоставления:
(i) вычитание значения из каждого из замеров подмножества;
(ii) определение абсолютного значения каждого замера на выходе этапа (i);
(iii) определение среднего значения замеров на выходе этапа (ii);
(b) перемещение окна по сигналу, полученному в результате этапа сопоставления, и повтор этапа (a); и
(c) определение скользящего среднего значения сигнала, полученного на этапе (b) для формирования отфильтрованного сигнала.
4. Способ по п. 2, в котором этап обработки измерений ускорения дополнительно содержит:
- идентификацию возможных движений в отфильтрованном сигнале как пиков в отфильтрованном сигнале.
5. Способ по п. 4, в котором возможное движение идентифицируется там, где пик имеет амплитуду большую, чем пороговое значение.
6. Способ по п. 5, в котором этап обработки измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя, дополнительно содержит этап, на котором:
- оценивают время начала и завершения для каждого идентифицированного возможного движения как время, соответствующее замерам в обе стороны от соответствующего пика в отфильтрованном сигнале, где амплитуды замеров равны заданной части порогового значения.
7. Способ по п. 6, который дополнительно содержит этап определения изменения высоты для каждого возможного движения из полученного сигнала высоты посредством:
- определения высоты до возможного движения как среднего значения высоты части тела пользователя на основе окна, охватывающего замеры в сигнале высоты до оцененного времени начала для возможного движения;
- определения высоты после возможного движения как среднего значения высоты части тела пользователя на основе окна, охватывающего замеры в сигнале высоты после оцененного времени завершения для возможного движения; и
- вычитания определенной высоты до возможного движения из определенной высоты после возможного движения, чтобы выдать изменение высоты во время возможного движения.
8. Способ по п. 6, который дополнительно содержит этапы, на которых:
определяют то, когда пользователь находится на ногах, как периоды времени после перехода из положения сидя в положение стоя до следующего перехода из положения стоя в положение сидя; и
суммируют продолжительность каждого из периодов времени для того, чтобы выдать продолжительность пребывания на ногах.
9. Способ по п. 8, причем способ дополнительно содержит этап, на котором:
определяют риск падения для пользователя из определенной продолжительности пребывания на ногах.
10. Постоянный машиночитаемый носитель, содержащий компьютерный программный код, который при выполнении на компьютере предписывает компьютеру идентифицировать переходы между положением стоя и положением сидя в измерениях движения пользователя посредством:
- получения измерений ускорения, испытываемого пользователем во время движения;
- получения сигнала, указывающего высоту части тела пользователя во время движения;
- обработки измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя; и
- определения идентифицированного возможного движения как перехода из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, и идентифицированного возможного движения как перехода из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале,
при этом обработка измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя, содержит сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию, и сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию содержит:
- фильтрацию измерения ускорения с помощью заданного профиля ускорения для того, чтобы произвести отфильтрованный в прямом направлении сигнал;
- переворот в обратном направлении отфильтрованного в прямом направлении сигнала; и
- фильтрацию перевернутого сигнала с помощью заданного профиля ускорения.
11. Устройство для идентификации переходов между положением стоя и положением сидя в измерениях движения пользователя, причем устройство содержит:
аппаратный процессор, выполненный с возможностью:
- обработки измерений ускорения, испытываемого пользователем для того, чтобы идентифицировать возможные движения, соответствующие переходам между положением стоя и положением сидя;
- определения идентифицированного возможного движения как перехода из положения сидя в положение стоя, где идентифицированное возможное движение совпадает с увеличением высоты в сигнале, указывающем высоту части тела пользователя во время движения, и определения идентифицированного возможного движения как перехода из положения стоя в положение сидя, где идентифицированное возможное движение совпадает с уменьшением высоты в сигнале, указывающем высоту части тела пользователя,
при этом обработка измерений ускорения для идентификации возможных движений, соответствующих переходам между положением стоя и положением сидя, содержит сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию, и сопоставление измерений ускорения с заданным профилем ускорения для перехода от сидения к стоянию содержит:
- фильтрацию измерения ускорения с помощью заданного профиля ускорения для того, чтобы произвести отфильтрованный в прямом направлении сигнал;
- переворот в обратном направлении отфильтрованного в прямом направлении сигнала; и
- фильтрацию перевернутого сигнала с помощью заданного профиля ускорения.
12. Устройство по п. 11, дополнительно содержащее:
- акселерометр, который измеряет в трех измерениях ускорение, оказывающее влияние на устройство, причем аппаратный процессор выполнен с возможностью обработки измерений ускорения от акселерометра.
13. Устройство по п. 11, дополнительно содержащее:
- устройство, которое выполнено с возможностью ношения пользователем, при этом устройство содержит акселерометр, который измеряет в трех измерениях ускорение, оказывающее влияние на устройство; и
- базовый блок, который выполнен с возможностью взаимодействия с устройством, причем аппаратный процессор выполнен с возможностью обработки измерений ускорения от акселерометра.
| WO 2010134010 A1, 25.11.2010 | |||
| US 8206325 В1, 26.06.2012 | |||
| WO 2010035187 A1, 01.04.2010 | |||
| Устройство измерения угла опережения подачи топлива в дизель | 1985 |
|
SU1302162A1 |
| СИСТЕМА И СПОСОБ ДЛЯ МЕДИЦИНСКОГО МОНИТОРИНГА И ОБРАБОТКИ ПОСРЕДСТВОМ КОСМЕТИЧЕСКОГО МОНИТОРИНГА И ОБРАБОТКИ | 2006 |
|
RU2385669C2 |

