РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Представленная заявка испрашивает приоритет предварительной заявки США №61/617516, поданной 29 марта 2012 года, и предварительной заявки США №61/763229, поданной 11 Февраля 2013 года, полное содержание которых включено в данную заявку посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Варианты осуществления представленного изобретения относятся к предоставлению вида сверху обнаруженных физических объектов, расположенных вокруг промышленной машины, такой как электрический канатный или одноковшовый экскаватор.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Промышленные машины, такие как электрический канатный или одноковшовый экскаваторы, скребковые экскаваторы и т.д., используются для выполнения земляных работ для извлечения материала, например, из забоя карьера. В процессе земляных работ оператор управляет канатным экскаватором с целью загрузки ковша материалом. Оператор помещает материал из ковша в карьерный самосвал. После помещения материала цикл рытья продолжается, и оператор поворачивает ковш назад к забою для выполнения дальнейшей выемки грунта.
[0004] Когда ковш движется, важно иметь четкую траекторию поворота, чтобы избежать столкновения с другими объектами. Например, по траектории поворота ковш может ударять карьерный самосвал или другое оборудование. Ковш также может ударять забой, землю, другие части экскаватора и/или другие объекты, расположенные вокруг экскаватора. Удар, особенно если сильный, может являться причиной повреждения ковша и ударенных объектов. В дополнение, удар может являться причиной повреждения других составных элементов экскаватора.
[0005] Соответственно, варианты осуществления изобретения предлагают системы и способы обнаружения и смягчения столкновений экскаватора. Для обнаружения столкновений системы и способы выявляют объекты в пределах зоны вокруг экскаватора. После обнаружения объектов системы и способы могут необязательно автоматически дополнять управление экскаватором для смягчения удара от возможных столкновений с обнаруженными объектами. При смягчении столкновения системы и способы могут предоставлять предупреждения оператору экскаватора, используя аудиальную, визуальную и/или тактильную обратную связь.
[0006] В частности, один вариант осуществления изобретения предлагает систему для предоставления вида сверху зоны вокруг экскаватора. Система содержит по меньшей мере один процессор. По меньшей мере один процессор выполнен с возможностью приема данных по меньшей мере от одного датчика, установленного на экскаваторе, при этом данные относятся к зоне вокруг экскаватора, идентификации множества плоскостей на основании данных, и определения, расположено ли множество плоскостей в предварительно определенной конфигурации, связанной с карьерным самосвалом. Если множество плоскостей расположены в предварительно определенной конфигурации, по меньшей мере один процессор выполнен с возможностью наложения множества плоскостей на изображение вида сверху экскаватора и зоны.
[0007] Еще один вариант осуществления изобретения предлагает способ предоставления вида сверху зоны вокруг промышленной машины. Способ включает получение, по меньшей мере в одном процессоре, данных по меньшей мере от одного датчика, установленного на промышленной машине, при этом данные относятся к зоне вокруг промышленной машины. Способ также включает идентификацию, с помощью по меньшей мере одного процессора, множества плоскостей на основании данных, определение, с помощью по меньшей мере одного процессора, расположено ли множество плоскостей в предварительно определенной конфигурации, связанной с предварительно определенным физическим объектом, и если множество плоскостей расположены в предварительно определенной конфигурации, - наложения множества плоскостей на изображение вида сверху промышленной машины и зоны.
[0008] Другие аспекты изобретения станут очевидны при рассмотрении подробного описания и сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Комплект материалов патента или заявки содержит по меньшей мере один чертеж.
[0010] Фиг. 1 иллюстрирует промышленную машину и карьерный самосвал согласно одному варианту осуществления изобретения.
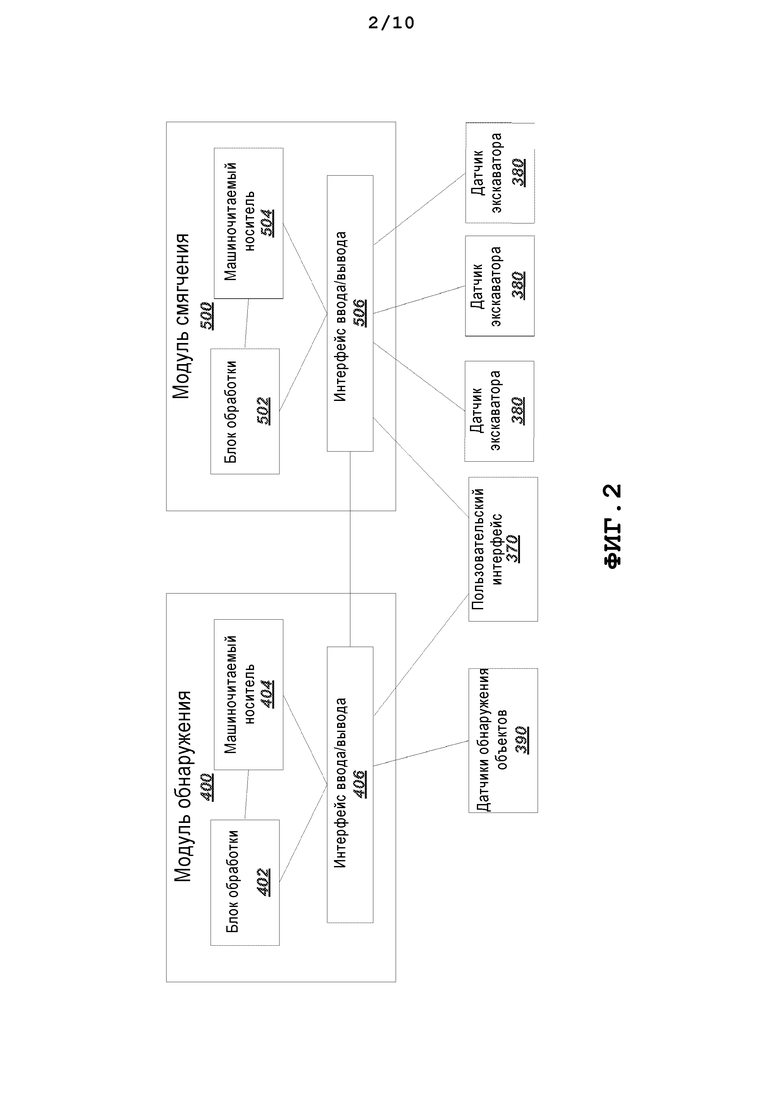
[0011] Фиг. 2 иллюстрирует контроллер для промышленной машины Фиг. 1.
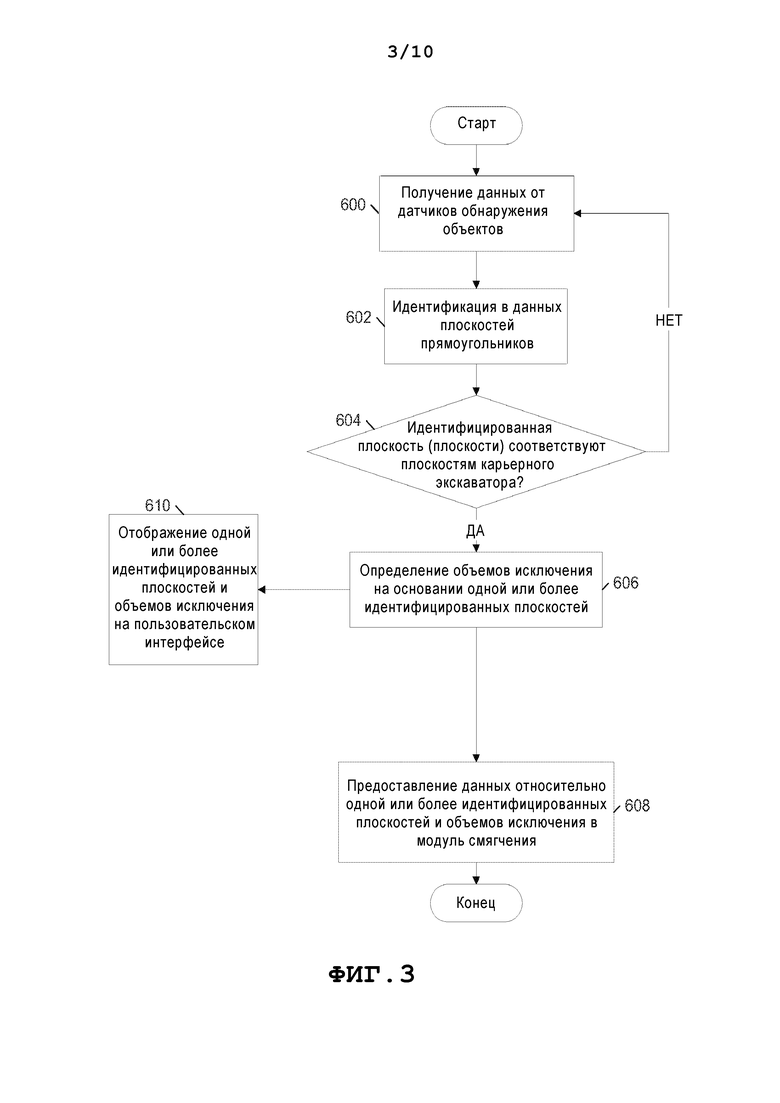
[0012] Фиг. 3 представляет собой блок-схему, иллюстрирующую способ обнаружения объектов, выполняемый контроллером Фиг. 2.
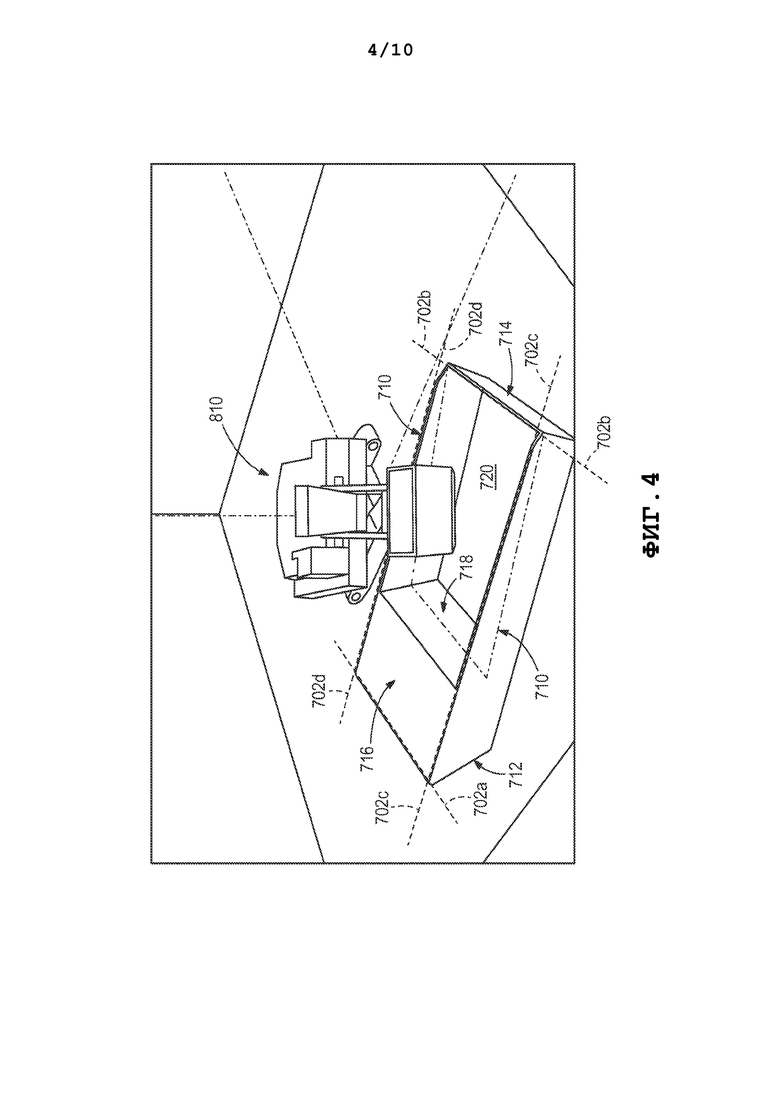
[0013] Фиг. 4 показывает иллюстративные плоскости, обнаруженные контроллером Фиг. 2.
[0014] Фиг. 5 показывает иллюстративные объемы исключения, определяемого контроллером Фиг. 2 на основании плоскостей Фиг. 4.
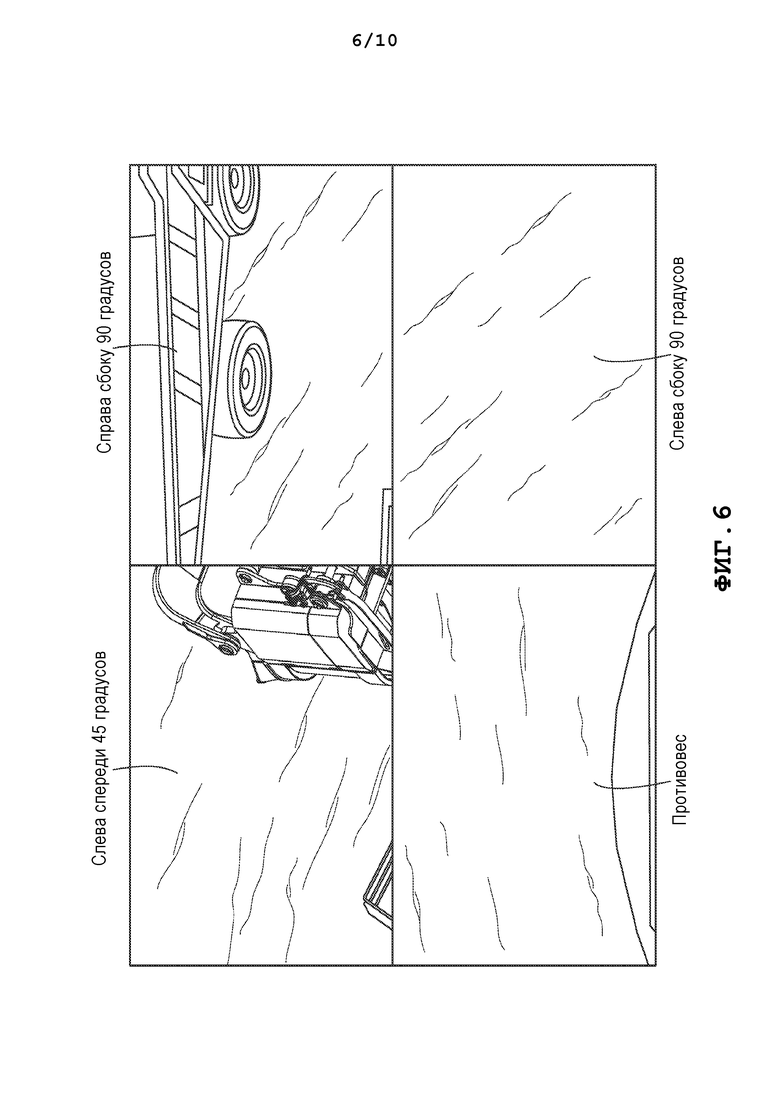
[0015] Фиг. 6 иллюстрирует изображения, захватываемые вокруг промышленной машины.
[0016] Фиг. 7 иллюстрирует вид сверху промышленной машины на основании изображений Фиг. 6.
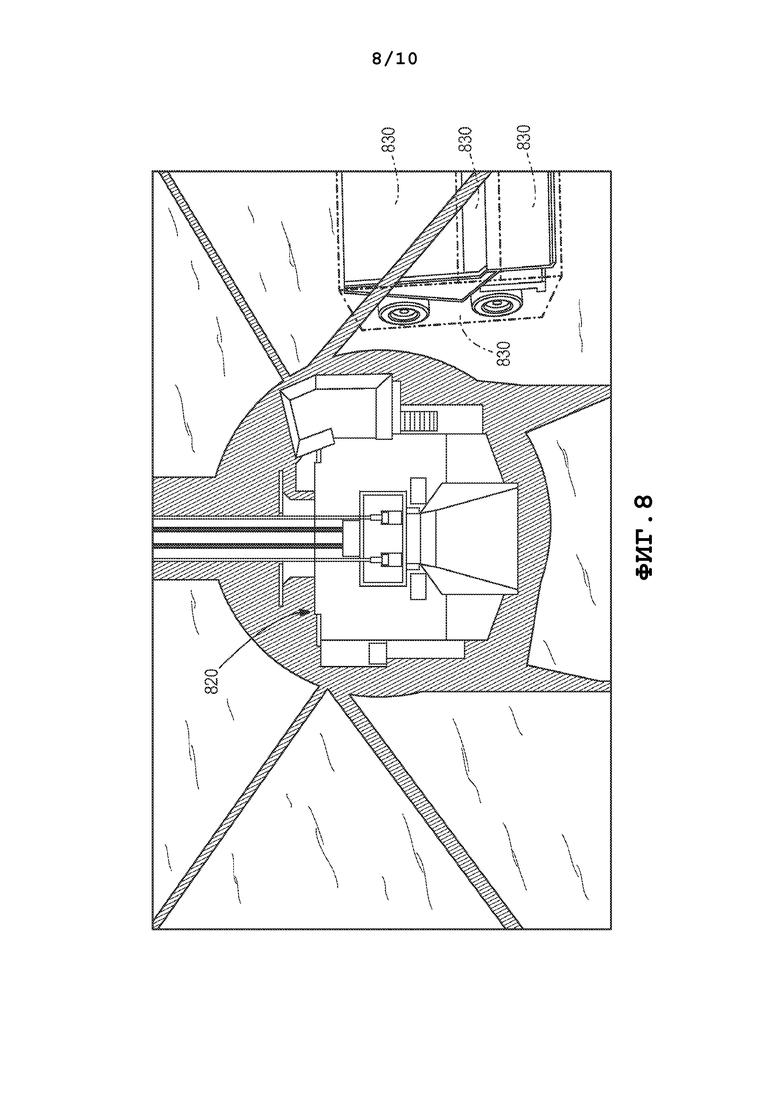
[0017] Фиг. 8 иллюстрирует вид сверху Фиг. 7, совмещенный с плоскостями, обнаруженными контроллером Фиг. 2.
[0018] Фиг. 9 представляет собой блок-схему, иллюстрирующую способ смягчения столкновения, выполняемый контроллером Фиг. 2.
[0019] Фиг. 10 иллюстрирует контроллер для промышленной машины согласно еще одному варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] Перед подробным объяснением каких-либо вариантов осуществления изобретения должно быть понятно, что применение изобретения не ограничено деталями конструкции и расположения составных элементов, изложенными в следующем описании или проиллюстрированными на следующих чертежах. Изобретение допускает другие варианты осуществления и практического применения или осуществления различными способами. Также, должно быть понятно, что фразеология и терминология, используемые в данном описании, предназначены для целей описания и не должны рассматриваться в качестве ограничения. Использование «включающий», «содержащий» или «имеющий» и их вариантов в данном документе подразумевает охват пунктов, перечисленных после этого, и их эквивалентов, а также дополнительных пунктов. Термины «установленный», «связанный» и «соединенный» используются широко и охватывают как прямую и непрямую установку, связывание и соединение. Кроме того, «связанный» и «соединенный» не ограничены физическими или механическими связями или соединениями и могут включать электрические связи или соединения, неважно прямые или непрямые. Также, электронные сообщения и оповещения можно выполнять с использованием любого известного средства, включая прямые соединения, беспроводные соединения и т.д.
[0021] Также необходимо заметить, что для осуществления изобретения может быть использовано множество основанных на аппаратном и программном обеспечении устройств, а также множество различных конструктивных составных элементов. В дополнение, должно быть понятно, что варианты осуществления изобретения могут содержать аппаратные средства, программное обеспечение и электронные составные элементы или модули, которые, для целей обсуждения, могут быть проиллюстрированы и описаны, как если бы большинство составных элементов были реализованы в виде аппаратных средств. Однако любой рядовой специалист в данной области, и на основании чтения данного подробного описания, должен признать, что, по меньшей мере в одном варианте осуществления, основанные на электронике аспекты изобретения могут быть реализованы в программном обеспечении (например, сохранены на энергонезависимом машиночитаемом носителе), выполняемом одним или более процессорами. В связи с этим необходимо заметить, что для осуществления изобретения может быть использовано множество основанных на аппаратном и программном обеспечении устройств, а также множество различных конструктивных составных элементов. Кроме того, и как описано в последующих параграфах, специфические механические конфигурации, проиллюстрированные на чертежах, предназначены для иллюстрации вариантов осуществления изобретения, и что возможны другие альтернативные механические конфигурации. Например, «контроллеры», описанные в описании, могут включать стандартные процессорные компоненты, такие как один или более процессоров, один или более модулей машиночитаемых носителей, один или более интерфейсов ввода/вывода и различные соединения (например, системную шину), соединяющие составные элементы.
[0022] Фиг. 1 изображает иллюстративный канатный экскаватор 100. Канатный экскаватор 100 содержит гусеницы 105 для передвижения канатного экскаватора 100 вперед и назад и для поворота канатного экскаватора 100 (т.е. за счет изменения скорости и/или направления левой и правой гусениц друг относительно друга). Гусеницы 105 поддерживают платформу 110, содержащую кабину 115. Платформа 110 способна поворачиваться или вращаться вокруг оси 125 поворота, например, для передвижения с места выемки грунта в место разгрузки и назад к месту выемки грунта. В некоторых вариантах осуществления передвижение гусениц 105 не является необходимым для поворотного движения. Канатный экскаватор дополнительно содержит вал ковша или стрелу 130, поддерживающую поворотную рукоять 135 ковша и ковш 140. Ковш 140 содержит откидное днище 145 для выгрузки содержимого, заключенного внутри ковша 140 в место выгрузки.
[0023] Экскаватор 100 также содержит туго натянутые несущие тросы 150, соединенные между платформой 110 и стрелой 130, для поддержки вала 130 ковша; грузоподъемный трос 155, прикрепленный к лебедке (не показано) внутри платформы 110, для наматывания троса 155 с целью подъема и опускания ковша 140; и трос 160 откидного днища ковша, прикрепленный к другой лебедке (не показано), для открывания откидного днища 145 ковша 140. В некоторых случаях экскаватором 100 является экскаватор P&H® серии 4100, выпускаемый P&H Mining Equipment Inc., хотя экскаватором 100 может быть электрическое горнопроходческое оборудование другого типа или модели.
[0024] Когда гусеницы 105 карьерного экскаватора 100 являются неподвижными, ковш 140 выполнен с возможностью передвижения на основании трех управляющих действий, подъема, выполнения напорного движения и поворота. Управление подъемом поднимает и опускает ковш 140 посредством наматывания и разматывания грузоподъемного троса 155. Управление напорным движением выдвигает и втягивает положение рукояти 135 и ковша 140. В одном варианте осуществления рукоять 135 и ковш 140 выполняют напорное движение за счет использования системы реечной передачи. В еще одном варианте осуществления рукоять 135 и ковш 140 выполняют напорное движение, используя систему гидравлического привода. Управление поворотом вращает рукоять 135 относительно оси 125 поворота. В процессе работы оператор управляет ковшом 140, чтобы вынимать грунтовый материал с места выемки грунта, поворачивать ковш 140 в место выгрузки, высвобождая откидное днище 145 для выгрузки грунтового материала и стягивать ковш 140, что вызывает закрывание откидного днища 145, и поворачивать ковш 140 в то же самое или другое место выемки грунта.
[0025] Фиг. 1 также изображает карьерный самосвал 175. В процессе работы канатный экскаватор 100 вываливает материал, заключенный внутри ковша 140, в кузов 176 карьерного самосвала посредством открывания откидного днища 145. Хотя канатный экскаватор 100 описан при использовании с карьерным самосвалом 175, канатный экскаватор 100 также имеет возможность выгрузки материала из ковша 140 в другие приемники материала, такие как передвижная горнорудная дробильная установка, или прямо на землю.
[0026] Как описано выше в разделе сущность изобретения, когда оператор поворачивает ковш 140, ковш 140 может сталкиваться с другими объектами, такими как карьерный самосвал 175 (например, кузов 176 карьерного самосвала 175) и другие составные элементы экскаватора 100 (например, гусеницы 105, противовес, расположенный в задней части экскаватора 100, и т.д.). Данные столкновения (например, удары металла по металлу) могут являться причиной повреждения ковша 140, экскаватора 100 и ударенного объекта. Вследствие этого экскаватор 100 содержит контроллер, который обнаруживает объекты, и автоматически дополняет управление ковшом 140 для смягчения столкновения между ковшом 140 и обнаруженным объектом.
[0027] Контроллер содержит комбинации аппаратного и программного обеспечения, которые выполнены с возможностью, среди прочего, контролировать работу экскаватора 100, а при необходимости автоматически дополнять управление экскаватором 100. На Фиг. 2 проиллюстрирован контроллер 300 согласно одному варианту осуществления изобретения. Как проиллюстрировано на Фиг. 2, контроллер 300 содержит модуль 400 обнаружения и модуль 500 смягчения. Модуль 400 обнаружения содержит, среди прочего, блок 402 обработки (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство), энергонезависимый машиночитаемый носитель 404 и интерфейс 406 ввода/вывода. Блок 402 обработки, память 404 и интерфейс 406 ввода/вывода соединены одной или более управляющими и/или информационными шинами (например, общей шиной 408). Аналогичным образом модуль 500 смягчения содержит, среди прочего, блок 502 обработки (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство), энергонезависимый машиночитаемый носитель 504 и интерфейс 506 ввода/вывода. Блок 502 обработки, память 504 и интерфейс 506 ввода/вывода соединены одной или более управляющими и/или информационными шинами (например, общей шиной 508). Должно быть понятно, что в других конструкциях модуль 400 обнаружения и/или модуль 500 смягчения содержит дополнительные, меньше или другие составные элементы.
[0028] Как описано более подробно ниже, модуль 400 обнаружения выявляет объекты и предоставляет информацию об обнаруженных объектах в модуль 500 смягчения. Модуль 500 смягчения использует информацию из модуля 400 обнаружения и другую информацию, касающуюся экскаватора 100 (например, текущее положение, движение и т.д.), для идентификации или выявления возможных столкновений и, необязательно, смягчения столкновений. Должно быть понятно, что в различных конфигурациях функции контроллера 300 могут быть распределены между модулем 400 обнаружения и модулем 500 смягчения. Например, в некоторых вариантах осуществления, в качестве альтернативы или в дополнение к функциям модуля 500 смягчения, модуль 400 обнаружения выявляет возможные столкновения на основании обнаруженных объектов (и другой информации, касающейся экскаватора 100, получаемой непосредственно или опосредованно через модуль 500 смягчения) и предоставляет предупреждения оператору. Модуль 400 обнаружения также может предоставлять информацию, касающуюся идентифицированных возможных столкновений, в модуль 500 смягчения, а модуль 500 смягчения может использовать информацию для автоматического смягчения столкновений.
[0029] Разделение контроллера 300 на модуль 400 обнаружения и модуль 500 смягчения обеспечивает возможность использования функций каждого модуля независимо и в различных конфигурациях. Например, для обнаружения объектов, выявления столкновений и/или предоставления предупреждений оператору модуль 400 обнаружения может использоваться без модуля 500 смягчения. В дополнение, модуль 500 смягчения может быть выполнен с возможностью приема данных из множества модулей 400 обнаружения (например, каждый модуль 400 обнаружения выявляет конкретные объекты или конкретную зону вокруг экскаватора 100). Кроме того, за счет разделения контроллера 300 между двумя модулями, каждый модуль можно тестировать отдельно, гарантируя, что модуль работает должным образом.
[0030] Машиночитаемый носитель 404 и 504 сохраняет команды программы и данные. Процессоры 402 и 502, содержащиеся в каждом модуле 400 и 500, выполнены с возможностью извлечения команд из носителей 404 и 504 и выполнения, среди прочего, команд выполнения процессов и способов управления, описанных в данном документе. Интерфейсы 406 и 506 ввода/вывода каждого модуля 400 и 500 передают данные из модуля во внешние системы, сети и/или устройства и получают данные из внешних систем, сетей и/или устройств. Интерфейсы 406 и 506 ввода/вывода также могут сохранять данные, полученные из внешних источников, на носители 404 и 504 и/или предоставлять данные в процессоры 402 и 502, соответственно.
[0031] Как проиллюстрировано на Фиг. 2, модуль 500 смягчения находится в сообщении с пользовательским интерфейсом 370. Пользовательский интерфейс 370 предоставляет пользователю возможность выполнения управления напорным движением, управления поворотом, управления подъемом и управления откидным днищем. Например, интерфейс 370 может содержать одно или более управляемых оператором устройств ввода, таких как джойстики, рычаги, ножные педали и другие исполнительные механизмы. Пользовательский интерфейс 370 получает входные данные от оператора через устройства ввода и выводит цифровые команды передвижений в модуль 500 смягчения. Команды передвижений включают, например, подъем, опускание, выдвижение механизма черпания, втягивание механизма черпания, поворот по часовой стрелке, поворот против часовой стрелки, освобождение откидного днища ковша, левая гусеница вперед, левая гусеница назад, правая гусеница вперед и правая гусеница назад. Как будет объяснено более подробно, модуль 500 смягчения выполнен с возможностью автоматизированного дополнения команд оператора на приведение в движение. В некоторых вариантах осуществления модуль 500 смягчения также может предоставлять оператору обратную связь через пользовательский интерфейс 370. Например, если модуль 500 смягчения автоматически дополняет управление оператором ковшом 140, модуль 500 смягчения может использовать пользовательский интерфейс 370, чтобы уведомить оператора об автоматизированном управлении (например, использовать визуальную, аудиальную или тактильную обратную связь).
[0032] Модуль 500 смягчения также находится в сообщении с рядом датчиков 380 положения экскаватора для мониторинга местоположения и состояния ковша 140 и/или других составных элементов экскаватора 100. Например, в некоторых вариантах осуществления, модуль 500 смягчения соединен с одним или более датчиками длины хода, датчиками поворота, датчиками подъема и датчиками ковша. Датчики длины хода показывают уровень выдвижения или втягивания рукояти 135 и ковша 140. Датчики поворота показывают угол поворота рукояти 135. Датчики подъема показывают высоту ковша 140 на основании положения грузоподъемного троса 155. Датчики ковша показывают, открыто ли откидное днище ковша 145 (для разгрузки) или закрыто. Датчики ковша также могут содержать датчики массы, датчики ускорения и датчики наклона для предоставления дополнительной информации в модуль 500 смягчения о загрузке внутри ковша 140. В некоторых вариантах осуществления один или более датчиков длины хода, датчиков поворота и датчиков подъема представляют собой круговые датчики положения, которые показывают абсолютное положение или относительное передвижение двигателей, используемых для передвижения ковша 140 (например, двигателя механизма черпания, двигателя поворота и/или двигателя подъема). Например, для показа относительного передвижения, когда двигатель подъема вращается, наматывая грузоподъемный трос 155 для подъема ковша 140, датчики подъема выдают цифровой сигнал, показывающий величину вращения лебедки и направление передвижения. Модуль 500 смягчения переводит эти выходные данные в положение по высоте, скорость и/или ускорение ковша 140.
[0033] Как проиллюстрировано на Фиг. 2, в некоторых вариантах осуществления, модуль 400 обнаружения также находится в сообщении с пользовательским интерфейсом 370. Например, пользовательский интерфейс 370 может содержать дисплей, при этом модуль 400 обнаружения может отображать на дисплее показания обнаруженных объектов. В качестве альтернативы или в дополнение, модуль 400 обнаружения может отображать на пользовательском интерфейсе 370 предупреждения, если модуль 400 обнаружения выявляет объект в пределах предварительно определенного расстояния от экскаватора 100, и/или если модуль 400 обнаружения выявляет возможное столкновение с обнаруженным объектом. Должно быть понятно, что в некоторых вариантах осуществления дисплей отделен от пользовательского интерфейса 370. В дополнение, в некоторых вариантах осуществления, дисплей может быть частью пульта оператора, расположенного удаленно от экскаватора 100, и может быть выполнен с возможностью взаимодействия с модулем 400 обнаружения и/или модулем 500 смягчения посредством одного или более проводных или беспроводных соединений.
[0034] Модуль 400 обнаружения также находится в сообщении с рядом датчиков 390 обнаружения объектов для обнаружения объектов. Датчики 390 могут содержать цифровые камеры и/или лазерные сканеры (например, 2-D или 3-D сканеры). Например, в некоторых вариантах осуществления, датчики 390 содержат один или более лазерных сканеров SICK LD-MRS. В других вариантах осуществления, в качестве альтернативы или в дополнение, датчики 390 содержат одну или более стереокамер TYSX G3 EVS AW. В вариантах осуществления, где датчики 390 содержат как лазерные сканеры, так и камеры, если камеры недоступны или не работают должным образом, модуль 400 обнаружения может использовать только лазерные сканеры, и наоборот. В некоторых вариантах осуществления датчики 390 содержат по меньшей мере три лазерных сканера. Один сканер может быть расположен с левой стороны (если смотреть со стороны оператора экскаватора) экскаватора 100 (для отслеживания разгрузки материала влево от экскаватора 100). Второй сканер может быть расположен с правой стороны (если смотреть со стороны оператора экскаватора) экскаватора 100 (для отслеживания разгрузки материала вправо от экскаватора 100). Третий сканер может быть расположен в задней части экскаватора 100 для обнаружения объектов, обычно расположенных позади экскаватора 100 (например, которые могут сталкиваться с противовесом в задней части экскаватора 100).
[0035] Как отмечалось выше, модуль 400 обнаружения и модуль 500 смягчения выполнены с возможностью извлечения команд из носителей 404 и 504, соответственно, и выполнения, среди прочего, команд, связанных с выполнением процессов и способов управления экскаватором 100. Например, Фиг. 3 представляет собой блок-схему, иллюстрирующую способ обнаружения объектов, выполняемый модулем 400 обнаружения. Как проиллюстрировано на Фиг. 3, модуль 400 обнаружения получает данные от датчиков 390 обнаружения объектов (под номером 600) и идентифицирует объекты, которые могут сталкиваться с экскаватором 100, на основании данных (например, объекты, которые могут сталкиваться с ковшом 140). В некоторых вариантах осуществления модуль 400 обнаружения выполняет способ локального обнаружения для поиска объектов непосредственно на траектории ковша 140 (т.е. в предварительно определенной интересующей области вокруг экскаватора 100), которые могут сталкиваться с ковшом 140, когда ковш 140 движется. Например, в пределах способа локального обнаружения, модуль 400 обнаружения может получать данные от датчиков 390, сосредоточенных на предварительно определенной интересующей области вокруг экскаватора 100 (например, влево или вправо от ковша 140). В некоторых вариантах осуществления способ локального обнаружения также классифицирует обнаруженные объекты, например, является ли обнаруженный объект частью экскаватора 100 или нет.
[0036] В качестве альтернативы или в дополнение, модуль 400 обнаружения выполняет способ глобального обнаружения, который наносит на карту место обнаруженных объектов в окрестностях экскаватора. Способ глобального обнаружения может фокусироваться на более большой, предварительно определенной интересующей области, чем интересующая область, связанная с локальным способом обнаружения. Способ глобального обнаружения также может пытаться распознать конкретные объекты. Например, способ глобального обнаружения может определять, является ли обнаруженный объект частью карьерного самосвала, частью земли, частью стенки и т.д.
[0037] В некоторых вариантах осуществления модуль 400 обнаружения выполнен с возможностью выявления отдельных объектов, таких как карьерные самосвалы 175. Для обнаружения самосвалов 175 модуль 400 обнаружения идентифицирует плоскости на основании данных от датчиков 390 (под номером 602). В частности, модуль 400 обнаружения может быть выполнен с возможностью идентификации одной или более горизонтальных и/или вертикальных плоскостей в конфигурации, обычно связанной с карьерным самосвалом 175. Например, как проиллюстрировано на Фиг. 1, карьерный самосвал 175 обычно содержит приблизительно горизонтальный щит 700, который проходит поверх кабины 702 самосвала 175. Карьерный самосвал 175 также содержит приблизительно горизонтальный кузов 176. В дополнение, карьерный самосвал 175, как правило, содержит вертикальную переднюю плоскость, две вертикальные боковые плоскости и вертикальную заднюю плоскость. Соответственно, модуль 400 обнаружения может быть выполнен с возможностью идентификации множества плоскостей на основании данных, подаваемых датчиками 390, которые могут соответствовать передней части, боковым сторонам, задней части, щиту 700 и кузову 176 карьерного самосвала 175.
[0038] Например, как проиллюстрировано на Фиг. 4, зона карьерного самосвала 175 может быть ограничена множеством ограничивающих линий 702. Ограничивающие линии 702 включают переднюю ограничивающую линию 702a, образующую передний конец самосвала 175, заднюю ограничивающую линию 702b, образующую задний конец самосвала 175, дальнюю ограничивающую линию 702c, образующую первую сторону самосвала 175, более далекую от экскаватора 100, и ближнюю ограничивающую линию 702d, образующую вторую сторону самосвала, более близкую к экскаватору 100. Карьерный самосвал 175 также может быть ограничен линией 704 щита, которая отмечает задний край щита 700.
[0039] Линии 702 и 704 образуют различные плоскости, которые образуют самосвал 175. В частности, как проиллюстрировано на Фиг. 4, передняя ограничивающая линия 702a, дальняя ограничивающая линия 702c и задняя ограничивающая линия 702b образуют плоскость 706 дальней боковой стенки. Аналогичным образом, передняя ограничивающая линия 702a, ближняя ограничивающая линия 702d и задняя ограничивающая линия 702b образуют плоскость 710 ближней боковой стенки. Передняя ограничивающая линия 702a, дальняя ограничивающая линия 702c и ближняя ограничивающая линия 702d также образуют переднюю плоскость 712, а задняя ограничивающая линия 702b, дальняя ограничивающая линия 702c и ближняя ограничивающая линия 702d также образуют заднюю плоскость 714.
[0040] В дополнение, линия 704 щита, передняя ограничивающая линия 702a, дальняя ограничивающая линия 702c и ближняя ограничивающая линия 702d образуют верхнюю плоскость 716 щита. Линия 704 щита, дальняя ограничивающая линия 702c и ближняя ограничивающая линия 702d также образуют боковую плоскость 718 щита. Также, линия 704 щита, дальняя ограничивающая линия 702c, ближняя ограничивающая линия 702d и задняя ограничивающая линия 702b образуют плоскость 720 кузова.
[0041] Модуль 400 обнаружения выполнен с возможностью идентификации набора из одной или более плоскостей, проиллюстрированных на Фиг. 4, из данных, подаваемых датчиками 390 обнаружения объектов, в конфигурации, которая соответствует конфигурации плоскостей, связанных с карьерным самосвалом 175. В некоторых вариантах осуществления модуль 400 обнаружения выполнен с возможностью идентификации плоскостей конкретного размера. В других вариантах осуществления модуль 400 обнаружения выполнен с возможностью идентификации любых приблизительно прямоугольных плоскостей независимо от размера. В других вариантах осуществления модуль 400 обнаружения выполнен с возможностью идентификации любых прямоугольных плоскостей, которые превышают предварительно определенное пороговое значение размера. Должно быть понятно, что не все плоскости, проиллюстрированные на Фиг. 4, должны обнаруживаться модулем 400 обнаружения для обнаружения и идентификации карьерного самосвала. Например, если часть карьерного самосвала находится за пределами диапазона датчика 390 или не точно соответствует всей конфигурации плоскостей, проиллюстрированной на Фиг. 4 (например, имеет изогнутый щит), модуль 400 обнаружения может все-таки обнаружить самосвал, если по меньшей мере минимальное количество плоскостей обнаружены модулем 400 в должной конфигурации (например, передняя, задняя плоскости и плоскость кузова). Также должно быть понятно, что несмотря на то, что в представленной заявке для идентификации карьерных самосвалов описаны плоскости, модуль 400 обнаружения может быть выполнен с возможностью выявления отдельных плоскостей или других форм и ассоциированных конфигураций, связанных с другими типами объектов, таких как гусеницы 105, стенки, люди, противовес в задней части экскаватора 100 и т.д.
[0042] Модуль 400 обнаружения использует положения (и размеры) идентифицированных плоскостей для определения, соответствует ли обнаруженный объект карьерному самосвалу 175 (под номером 604). Например, в некоторых вариантах осуществления, модуль 400 обнаружения выполнен с возможностью обнаружения плоскостей из облака точек в трехмерном пространстве (т.е. x-y-z). В частности, для идентификации плоскостей, модуль 400 первоначально удаляет все точки ниже предварительно определенной высоты (т.е. ниже предварительно определенного значения z). Затем модуль 400 проецирует оставшиеся точки на двумерную плоскость, что приводит к двоичному двумерному изображению. Затем модуль 400 выполняет обнаружение пятен на двоичном двумерном изображении. Обнаружение пятен использует математические способы для обнаружения областей внутри цифрового изображения, которые отличаются по свойствам (например, яркости, цвету и т.д.) от окружающих зон. Вследствие этого обнаруженной областью или «пятном» является область цифрового изображения, в которой некоторые свойства областей являются постоянными или изменяются в пределах предварительно определенного диапазона значений (т.е. все точки в пятне являются аналогичными).
[0043] После обнаружения всех пятен на изображении модуль 400 обнаружения устраняет всякие пятна, которые не соответствуют предварительно определенному размеру (например, предварительно определенным пороговым значениям соотношения ширина/длина). Затем модуль 400 обнаружения выполняет выявление линий на каждом оставшемся пятне для определения, содержит ли пятно четыре ограничивающие линии 702 и линию 704 щита, обычно связанные с карьерным самосвалом 175. Если да, модуль 400 проверяет, что четыре ограничивающие линии 702 образуют прямоугольник (например, передняя ограничивающая линия 702a и задняя ограничивающая линия 702b являются параллельными и перпендикулярными дальней ограничивающей линии 702c и ближней ограничивающей линии 702d), и что линия 704 щита параллельна передней ограничивающей линии 702a и задней ограничивающей линии 702b. Используя местоположение четырех ограничивающих линий 702 в облаке точек, модуль 400 обнаружения затем определяет высоту линий 702 (т.е. значение z). Если высота линий показывает, что линии правильно образуют приблизительно горизонтальный прямоугольник, который соответствует предварительно определенным пороговым значениям соотношения длины/ширины (т.е. ни одна линия не находится в неожиданной плоскости z), модуль 400 проецирует каждую из линий 702 и 704 в направлении по высоте (т.е. в направлении z) к земле с образованием плоскости в трехмерном пространстве. В частности, плоскости включают переднюю плоскость 712, плоскость 706 дальней боковой стенки, плоскость 710 ближней боковой стенки, заднюю плоскость 714 и боковую плоскость 718 щита. Модуль 400 также проецирует плоскость от линии 704 щита до передней плоскости 712, которая образует верхнюю плоскость 716 щита. В дополнение, модуль 400 проецирует плоскость от верхней высотной точки задней плоскости 714 до половины высоты ниже линии 704 щита, которая образует плоскость 720 кузова.
[0044] После идентификации плоскостей карьерного самосвала 175 модуль 400 обнаружения на основании плоскостей может определять положение, размер и ориентацию карьерного самосвала 175. В некоторых вариантах осуществления модуль 400 обнаружения использует сетку для отслеживания положения, места и ориентации идентифицированных объектов (например, идентифицированных плоскостей). Модуль 400 обнаружения может предоставлять сетку в модуль 500 смягчения, а модуль 500 смягчения может использовать сетку для определения возможных столкновений между ковшом 140 и обнаруженными карьерными самосвалами 175 и, необязательно, для смягчения столкновений, соответственно.
[0045] В некоторых вариантах осуществления модуль 400 обнаружения также определяет объемы исключения на основании плоскостей идентифицированных карьерных самосвалов 175 (под номером 606). Например, в зависимости от конкретной плоскости, идентифицированной модулем 400 обнаружения в качестве отображения карьерного самосвала 175, модуль 400 обнаружения определяет объем, содержащий плоскость, который отмечает зону вокруг карьерного самосвала 175, в которую экскаватор 100 (например, ковш 140) не должен входить. Например, Фиг. 5 иллюстрирует объемы исключений, определяемых модулем 400 обнаружения для плоскостей, проиллюстрированных на Фиг. 4. Как проиллюстрировано на Фиг. 5, объем исключения 800, содержащий плоскость 716 щита, имеет форму куба и бесконечно продолжается вверх от плоскости. Вследствие этого объем исключения 800 показывает, что выше щита 700 не должна быть расположена никакая часть экскаватора 100 (например, для защиты оператора в кабине 702).
[0046] Аналогичным образом, модуль 400 обнаружения может определять объем исключения для плоскости 706 дальней боковой стенки и плоскости 710 ближней боковой стенки. Например, как проиллюстрировано на Фиг. 5, объем 802, содержащий плоскость 706 дальней боковой стенки, имеет треугольную форму и продолжается наружу от дальней стороны самосвала 175 к земле. Объем 802 имеет форму, как проиллюстрировано на Фиг. 5, показывая, что при приближении ковша 140 ближе к боковой стороне самосвала 175 ковш 140 должен подниматься на высоту больше, чем боковая сторона самосвала 175, для смягчения столкновения с дальней стороной самосвала 175. Как проиллюстрировано на Фиг. 5, модуль 400 обнаружения может генерировать имеющий аналогичную форму объем исключения 804, который содержит плоскость 710 ближней боковой стенки. Как также проиллюстрировано на Фиг. 5, модуль 400 обнаружения может определять объем исключения 806, содержащий заднюю плоскость 714. Например, как проиллюстрировано на Фиг. 5, объем 806 содержит заднюю плоскость 714, имеет форму трапеции, и продолжается наружу от задней части и боковых сторон самосвала 175 в направлении земли. Объем 804 имеет форму, как проиллюстрировано на Фиг. 5, показывая, что когда ковш 140 приближается к задней части самосвала 175, ковш 140 должен подниматься для смягчения столкновения с задней частью самосвала 175. Должно быть понятно, что в некоторых вариантах осуществления, в дополнение или в качестве альтернативы, модуль 400 обнаружения может определять объемы включения на основании идентифицированных плоскостей, которые образуют зоны, в пределах которых экскаватор 100 может благополучно работать.
[0047] В некоторых вариантах осуществления, после того, как модуль 400 обнаружения выявляет одну или более плоскостей, модуль 400 обнаружения может фиксировать плоскости. В данной ситуации модуль 400 обнаружения больше не пытается обнаруживать или идентифицировать объекты. Однако фиксированные плоскости могут использоваться для тестирования модуля 500 смягчения даже с обнаруженным удаленным объектом. Например, после того, как карьерный самосвал 175 обнаруживается в конкретном положении, карьерный самосвал 175 может быть физически удален, в то время как модуль 500 смягчения тестируется для определения, успешно ли модуль 500 автоматически дополняет управление ковшом 140, чтобы избежать столкновения с самосвалом 175 на основании фиксированного положения самосвала 175, ранее обнаруженного модулем 400 обнаружения. В этом отношении функциональность модуля 500 смягчения можно тестировать без риска повреждения экскаватора 100 или карьерного самосвала 175, если модуль 500 смягчения выходит из строя.
[0048] Возвращаясь к Фиг. 3, модуль 400 обнаружения предоставляет данные, касающиеся обнаруженных объектов (например, идентифицированных плоскостей и объемов исключения) в модуль 500 смягчения (под номером 608). В некоторых вариантах осуществления модуль 400 обнаружения также предоставляет данные, касающиеся обнаруженных объектов, на пользовательский интерфейс 370 (или отдельный дисплей, локализованный на экскаваторе 100 или удаленный от него) (под номером 610). Пользовательский интерфейс 370 может отображать пользователю информацию, касающуюся обнаруженных объектов. Например, пользовательский интерфейс 370 может отображать плоскости и/или объемы исключения, идентифицированные модулем 400 обнаружения, как проиллюстрировано на фигурах 4 и 5. Как проиллюстрировано на Фиг. 4, пользовательский интерфейс 370 может отображать плоскости самосвала, обнаруженные на текущий момент модулем 400 обнаружения в правильном положении относительно экскаватора 100. Пользовательский интерфейс 370 также может выборочно отображать объемы исключения (как проиллюстрировано на Фиг. 5). В некоторых вариантах осуществления пользовательский интерфейс 370 также отображает трехмерное изображение 810 экскаватора 100. В частности, пользовательский интерфейс 370 может отображать изображение 810 экскаватора 100, которое показывает X, Y и Z местоположение ковша, угол рукояти и текущий угол поворота или направления ковша 140. Текущее положение и движение экскаватора 100 могут быть получены из модуля 500 смягчения, который, как описано ниже, получает текущее состояние экскаватора 100 для определения возможных столкновений. Положение обнаруженных объектов может обновляться на пользовательском интерфейсе 370 по мере того, как обновленные данные получают из модуля 400 обнаружения (например, по существу непрерывно), и аналогичным образом, текущее положение экскаватора 100, как проиллюстрировано на изображении 810, может обновляться на пользовательском интерфейсе по мере того, как обновленные данные получают из модуля 500 смягчения (например, по существу непрерывно).
[0049] Плоскости и/или объемы исключений могут отображаться различными способами. Например, в некоторых вариантах осуществления, пользовательский интерфейс 370 накладывает обнаруженные плоскости на изображение камеры зоны рядом с экскаватором 100. В частности, одна или более фото или видеокамер, содержащих широкоугольный объектив, такой как объектив "рыбий глаз", может быть установлено на экскаваторе 100 и может использоваться для захвата изображения одной или более зон вокруг экскаватора 100. Например, Фиг. 6 иллюстрирует четыре изображения, захватываемые вокруг экскаватора с использованием четырех цифровых камер. Изображение из каждой камеры может быть развернуто (например, сплюснуто), и к развернутому изображению может быть применена трехмерная трансформация для генерирования изображения сверху экскаватора 100, как проиллюстрировано на Фиг. 7.
[0050] Вид сверху также может содержать графическое изображение 820 экскаватора 100 на изображении сверху. В некоторых вариантах осуществления изображение 820 может быть видоизменено на основании текущего состояния экскаватора 100 (например, текущего угла поворота ковша 140). Плоскости и/или объемы исключений, определяемые модулем 400 обнаружения, могут быть наложены на вид сверху экскаватора 100. Например, как проиллюстрировано на Фиг. 8, плоскости 830, идентифицированные модулем 400 обнаружения в качестве отображения карьерного самосвала, могут быть наложены на вид сверху на основании положения идентифицированного карьерного самосвала 175 относительно экскаватора 100. Оператор или другой наблюдатель может использовать вид сверху и наложенные плоскости 830 для (i) подтверждения, на самом ли деле обнаруженный объект является карьерным самосвалом, и (ii) быстрого выяснения текущего положения экскаватора 100 относительно идентифицированного карьерного самосвала или других обнаруженных объектов. В некоторых вариантах осуществления признаки наложенных плоскостей 830 (например, форма, размер, цвет, динамическое изображение и т.д.) могут использоваться для передачи информации об обнаруженных объектах. Например, если карьерный самосвал 175 находится внутри предварительно определенной опасной зоны, ограниченной вокруг экскаватора 100 (например, от 0 до 10 футов от экскаватора), плоскости 830 могут окрашиваться красным. В противном случае, плоскости 830 могут окрашиваться желтым. Кроме того, обнаруженные плоскости 830, представляющие валуны, стенки, людей и другие не являющиеся самосвалом объекты, могут отображаться в цвете, отличающемся от цвета обнаруженных плоскостей 830, представляющих карьерный самосвал 175. Использование различных цветов и других признаков наложенных плоскостей 830 могут снабжать оператора экскаватора быстрой ссылкой на окрестности экскаватора, даже если оператор видит только отображаемые плоскости 830 или другие изображения посредством его или ее периферийного зрения.
[0051] Фиг. 9 иллюстрирует способ смягчения столкновений, выполняемый модулем 500 смягчения. Как проиллюстрировано на Фиг. 9, модуль 500 смягчения получает данные, касающиеся обнаруженных объектов, (например, положение, размер, параметры, классификацию, плоскости, объемы исключения и т.д.) от модуля 400 обнаружения (под номером 900). Модуль 500 смягчения также получает данные от датчиков 380 положения экскаватора и пользовательского интерфейса 370 (под номером 902). Модуль 500 смягчения использует полученные данные для определения текущего положения экскаватора 100 (например, ковша 140) и любого текущего передвижения экскаватора (например, ковша 140). Как отмечалось выше, в некоторых вариантах осуществления, модуль 500 смягчения предоставляет информацию, касающуюся текущего положения и направления хода или передвижения экскаватора 100 в модуль 400 обнаружения и/или в пользовательский интерфейс 370 для отображения пользователю (под номером 904).
[0052] Модуль 500 смягчения также использует текущее положение и направление хода или передвижения экскаватора 100 для идентификации возможных столкновений между частью экскаватора 100, такой как ковш 140, и обнаруженным объектом (под номером 906). В некоторых вариантах осуществления модуль смягчения идентифицирует возможные столкновения на основании того, направляется ли ковш 140 в сторону и расположен ли на текущий момент в пределах предварительно определенного расстояния от обнаруженного объекта или объема исключения, связанного с обнаруженным объектом. Например, модуль 500 смягчения идентифицирует вектор скорости ковша 140. В некоторых вариантах осуществления вектор скорости связан с шаровой цапфой ковша 140. В других вариантах осуществления модуль 500 идентифицирует многочисленные векторы скорости, такие как вектор для множества наружных точек ковша 140. Модуль 500 смягчения может генерировать один или более векторов скорости на основании движения экскаватора 100 вперед. После генерирования одного или более векторов скорости модуль 500 выполняет геометрические расчеты для бесконечного вытягивания векторов скорости и определения, пересекает ли какой-либо вектор какую-либо из плоскостей, идентифицированных модулем 400 обнаружения (см. Фиг. 4). В других вариантах осуществления модуль 500 выполняет геометрические расчеты для определения, пересекает ли какой-либо вектор какой-либо из объемов исключений, идентифицированных модулем 400 обнаружения (см. Фиг. 5).
[0053] Если пересечение существует, модуль 500 идентифицирует, что столкновение возможно. Когда модуль 500 смягчения определяет, что столкновение возможно, модуль 500 смягчения может генерировать одно или более предупреждений (например, аудио, визуальных или тактильных) и выдавать предупреждения оператору экскаватора. Модуль 500 смягчения также может необязательно автоматически дополнять управление экскаватором 100 для предотвращения столкновения или уменьшать скорость удара при столкновении с обнаруженным объектом (под номером 908). В частности, модуль 500 смягчения может прикладывать силовое поле, которое замедляет ковш 140, когда он находится слишком близко к обнаруженному объекту. Модуль 500 смягчения также может применять ограничивающее скорость поле, которое ограничивает скорость ковша 140, когда он находится близко к обнаруженному объекту.
[0054] Например, модуль 500 может генерировать отталкивающее поле в точке идентифицированного пересечения. Отталкивающее поле видоизменяет команду на приведение в движение, генерируемую через пользовательский интерфейс 370, на основании входных данных от оператора. В частности, модуль 500 смягчения прикладывает отталкивающую силу к команде на приведение в движение для уменьшения команды. Например, модуль 500 смягчения получает команду на приведение в движение, использует отталкивающее поле для определения, насколько уменьшить команду, и выдает новую, видоизмененную команду на приведение в движение. Один или более контроллеров, содержащихся в экскаваторе 100, принимают команду на приведение в движение, или ее часть, и приводят в действие один или более составных элементов экскаватора на основании команды на приведение в движение. Например, контроллер, который поворачивает рукоять 135, поворачивает рукоять 135 по инструкции в команде на приведение в движение.
[0055] Должно быть понятно, что вследствие того, что векторы скорости бесконечно продлеваются, пересечение может быть идентифицировано, даже когда ковш 140 находится на большом расстоянии от обнаруженного объекта. Отталкивающее поле, прикладываемое модулем 500 смягчения, однако, может быть связано с максимальным радиусом и минимальным радиусом. Если обнаруженное пересечение находится за пределами максимального радиуса, модуль 500 смягчения не автоматически дополняет управление экскаватором 100 и, таким образом, смягчение столкновения не происходит.
[0056] Отталкивающее поле применяет увеличивающуюся отрицательную обратную связь к команде на приведение в движение по мере того, как ковш 140 передвигается ближе к центру отталкивающего поля. Например, когда ковш 140 сперва движется внутри максимального радиуса отталкивающей силы, отталкивающая сила уменьшает команду на приведение в движение на маленькую величину, например, приблизительно на 1%. Когда ковш 140 передвигается ближе к центру отталкивающего поля, отталкивающее поле уменьшает команду на приведение в движение на более большую величину, пока ковш 140 находится в пределах минимального радиуса силы, при этом уменьшение составляет приблизительно 100% и ковш 140 останавливается. В некоторых вариантах осуществления отталкивающее поле прикладывается только к передвижению ковша 140 в направлении обнаруженного объекта. Вследствие этого оператор может спокойно вручную передвигать ковш 140 в сторону от обнаруженного объекта. В некоторых ситуациях ковш 140 может отталкиваться многочисленными отталкивающими полями (например, связанными с многочисленными обнаруженными объектами или плоскостями обнаруженного объекта). Многочисленные отталкивающие поля предотвращают передвижение ковша 140 во множестве направлений. Однако, в большинстве ситуаций, все-таки будет иметься возможность передвижения ковша 140 вручную по меньшей мере в одном направлении, что обеспечивает возможность передвижения ковша 140 в сторону от обнаруженного объекта.
[0057] Вследствие этого модуль 500 смягчения может предотвращать столкновения между экскаватором 100 и другим объектом или может уменьшать силу подобных столкновений и получающихся в результате ударов. При предотвращении или смягчении столкновений (например, за счет ограничения передвижения экскаватора или ограничения скорости передвижения экскаватора), модуль 500 смягчения может предоставлять предупреждения оператору, используя аудиальную, визуальную или тактильную обратную связь (под номером 910). Предупреждения информируют оператора, что автоматизированное управление в дополняющем режиме является частью управления со смягчением столкновений по сравнению с неисправностью экскаватора 100 (например, отсутствие отклика ковша 140).
[0058] В некоторых вариантах осуществления, в отличие от других систем выявления столкновений, системы и способы, описанные в представленной заявке, не требуют модификаций для обнаруженных объектов, таких как карьерный самосвал 175. В частности, в некоторых конфигурациях, не требуется, чтобы на карьерный самосвал 175 были установлены датчики или устройства и связанные с ними устройства коммуникационной связи, которые используются с ним для предоставления в экскаватор 100 информации о местоположении карьерного самосвала 175. Например, в некоторых существующих системах, на карьерных самосвалах устанавливают визуальные опорные точки и другое пассивное/активное оборудование определения положения (например, устройства GPS), и экскаватор использует информацию от данного оборудования для отслеживания местоположения карьерного самосвала. Устранение необходимости в подобных модификациях уменьшает сложность систем и способов и уменьшает стоимость карьерных самосвалов 175.
[0059] Аналогичным образом, некоторые существующие системы обнаружения столкновений требуют предварительного программирования системы с характеристиками (например, изображение, размер, параметры, цвета и т.д.) всех доступных карьерных самосвалов (например, всех марок, моделей и т.д.). Системы обнаружения используют данные предварительно запрограммированных характеристик для идентификации карьерных самосвалов. Данный тип предварительного программирования, однако, увеличивает сложность системы и требует обширных и частых обновлений для обнаружений всех доступных карьерных самосвалов, когда новые самосвалы доступны, или имеются модификации к существующим карьерным самосвалам. В отличие от этого, как описано выше, модуль 400 обнаружения использует плоскости для идентификации транспорта. Использование плоскостей и конфигурация плоскостей, обычно связанных с карьерным самосвалом, увеличивает точность модуля 400 обнаружения и устраняет необходимость в обширном предварительном программировании и связанных обновлениях. В дополнение, за счет обнаружения объектов на основании больше, чем только одной характеристики, такой как размер, модуль 400 обнаружения более точно обнаруживает карьерные самосвалы. Например, используя конфигурации плоскостей, описанные выше, модуль 400 обнаружения может проводить различие между карьерными самосвалами и другими частями оборудования или другими частями окружения, аналогичными по размеру карьерному самосвалу (например, большими валунами).
[0060] Должно быть понятно, что хотя функциональность выше относится к обнаружению и смягчению столкновений между экскаватором 100 (т.е. ковшом 140) и карьерным самосвалом 175, та же самая функциональность может использоваться для обнаружения и/или смягчения столкновений между каким-либо составным элементом экскаватора 100 и каким-либо типом объекта. Например, функциональность может использоваться для обнаружения и/или смягчения столкновений между гусеницами 105 и ковшом 140, между гусеницами 105 и объектами, расположенными вокруг экскаватора 100, такими как валуны или люди, между противовесом в задней части экскаватора 100 и объектами, расположенными позади экскаватора 100, и т.д. Также, должно быть понятно, что функциональность контроллера 300, как описано в представленной заявке, может быть объединена с другими контроллерами для выполнения дополнительного набора функций. В дополнение или в качестве альтернативы, функциональность контроллера 300 также может распределяться между больше, чем одним контроллером. Также, в некоторых вариантах осуществления, контроллер 300 может использоваться в различных режимах. Например, в одном режиме, контроллер 300 может выявлять потенциальные столкновения, но может не управлять ковшом 140 в дополняющем режиме (т.е. задействовать только модуль 400 обнаружения). В данном режиме контроллер 300 может регистрировать информацию об обнаруженных объектах и/или обнаруженных возможных столкновениях с обнаруженными объектами и/или может предупреждать оператора об объектах и/или возможных столкновениях.
[0061] Также должно быть понятно, что хотя функциональность контроллера 300 описана выше в показателях двух модулей (т.е. модуля 400 обнаружения и модуля 500 смягчения), функциональность может быть распределена между двумя модулями в различных конфигурациях. Кроме того, в некоторых вариантах осуществления, как проиллюстрировано на Фиг. 10, контроллер 300 содержит комбинированный модуль, который выполняет функциональность модуля 400 обнаружения и модуля 500 смягчения.
[0062] Различные признаки и преимущества изобретения изложены в следующей формуле изобретения.





Изобретение относится к области предоставления изображения сверху промышленной машины, такой как экскаватор. Техническим результатом является определение физических объектов, расположенных вокруг машины. Раскрыта система для наложения множества плоскостей на вид сверху зоны вокруг экскаватора, при этом система содержит: по меньшей мере один процессор, выполненный с возможностью приема данных по меньшей мере от одного датчика, установленного на экскаваторе, при этом данные относятся к зоне вокруг экскаватора, идентификации множества плоскостей на основании данных, определения, расположено ли множество плоскостей в предварительно определенной конфигурации, связанной с карьерным самосвалом, и если множество плоскостей расположено в предварительно определенной конфигурации, наложения множества плоскостей на изображение вида сверху экскаватора и зоны. 2 н. и 20 з.п. ф-лы, 10 ил.
1. Система для наложения множества плоскостей на вид сверху зоны вокруг экскаватора, при этом система содержит:
по меньшей мере один процессор, выполненный с возможностью
приема данных по меньшей мере от одного датчика, установленного на экскаваторе, при этом данные относятся к зоне вокруг экскаватора,
идентификации множества плоскостей на основании данных,
определения, расположено ли множество плоскостей в предварительно определенной конфигурации, связанной с карьерным самосвалом, и
если множество плоскостей расположено в предварительно определенной конфигурации, наложения множества плоскостей на изображение вида сверху экскаватора и зоны.
2. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью установки цвета по меньшей мере одной из наложенного множества плоскостей на основании расстояния между ковшом и по меньшей мере одной из множества плоскостей.
3. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью создания динамического изображения по меньшей мере одной из наложенного множества плоскостей.
4. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью изменения по меньшей мере одной из наложенного множества плоскостей для предупреждения оператора экскаватора о возможном столкновении между ковшом и карьерным самосвалом.
5. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью наложения изображения, иллюстрирующего вид сверху экскаватора на изображение вида сверху.
6. Система по п. 4, в которой по меньшей мере один процессор дополнительно выполнен с возможностью изменения изображения, иллюстрирующего вид сверху экскаватора на основании текущего положения ковша.
7. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью вывода изображения вида сверху на пользовательский интерфейс, содержащийся в экскаваторе.
8. Система по п. 1, в которой по меньшей мере один процессор дополнительно выполнен с возможностью вывода изображения вида сверху на пользовательский интерфейс, находящийся удаленно от экскаватора.
9. Система по п. 1, в которой по меньшей мере один датчик содержит по меньшей мере один лазерный сканер.
10. Система по п. 1, в которой по меньшей мере один датчик содержит по меньшей мере одну стереокамеру.
11. Система по п. 1, в которой по меньшей мере один датчик содержит по меньшей мере один лазерный сканер и по меньшей мере одну стереокамеру.
12. Система по п. 1, в которой по меньшей мере один процессор выполнен с возможностью определения, расположено ли множество плоскостей в предварительно определенной конфигурации за счет определения, содержит ли множество плоскостей горизонтальную плоскость щита, горизонтальную плоскость кузова самосвала, вертикальную переднюю плоскость, две вертикальные боковые плоскости и вертикальную заднюю плоскость.
13. Способ наложения множества плоскостей на вид сверху зоны вокруг промышленной машины, при этом способ включает:
получение, по меньшей мере в одном процессоре, данных по меньшей мере от одного датчика, установленного на промышленной машине, при этом данные относятся к зоне вокруг промышленной машины,
идентификацию, с помощью по меньшей мере одного процессора, множества плоскостей на основании данных,
определение, с помощью по меньшей мере одного процессора, расположено ли множество плоскостей в предварительно определенной конфигурации, связанной с предварительно определенным физическим объектом,
если множество плоскостей расположено в предварительно определенной конфигурации, наложение множества плоскостей на изображение вида сверху промышленной машины и зоны.
14. Способ по п. 13, дополнительно включающий установку цвета по меньшей мере одной из наложенного множества плоскостей на основании расстояния между по меньшей мере одним подвижным составным элементом промышленной машины и по меньшей мере одной из наложенного множества плоскостей.
15. Способ по п. 13, дополнительно включающий создание динамического изображения по меньшей мере одной из наложенного множества плоскостей.
16. Способ по п. 13, дополнительно включающий изменение по меньшей мере одной из наложенного множества плоскостей для предупреждения оператора экскаватора о возможном столкновении между по меньшей мере одним подвижным составным элементом промышленной машины и физическим объектом.
17. Способ по п. 13, дополнительно включающий наложение изображения, иллюстрирующего вид сверху промышленной машины на изображение вида сверху.
18. Способ по п. 17, дополнительно включающий изменение изображения, иллюстрирующего вид сверху промышленной машины на основании текущего положения по меньшей мере одного подвижного составного элемента промышленной машины.
19. Способ по п. 13, дополнительно включающий вывод изображения вида сверху на пользовательский интерфейс, содержащийся в экскаваторе.
20. Способ по п. 13, дополнительно включающий вывод изображения вида сверху на пользовательский интерфейс, находящийся удаленно от экскаватора.
21. Способ по п. 13, в котором получение данных по меньшей мере от датчика включает получение данных по меньшей мере от одного из лазерного сканера и стереокамеры.
22. Способ по п. 13, в котором определение, расположено ли множество плоскостей в предварительно определенной конфигурации, включает определение, содержит ли множество плоскостей горизонтальную плоскость щита, горизонтальную плоскость кузова самосвала, вертикальную переднюю плоскость, две вертикальные боковые плоскости и вертикальную заднюю плоскость.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7578079 B2, 25.08.2009 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6363632 B1, 02.04.2002 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2007 |
|
RU2361273C2 |

