Область техники
[0001] Настоящее изобретение относится в общем к обнаружению и идентификации электропроводящих объектов в окружающем неэлектропроводящем материале.
[0002] Изобретение было разработано прежде всего для обнаружения инородных металлических объектов в порции груза добытой руды и/или грунта в производственном потоке горнодобычи в то время, когда эта порция груза поступает в и/или покидает различные контейнеры для транспортировки руды/грунта, используемые для перевозки руды, и в частности когда руда отбирается с помощью экскаватора. Тем не менее, хотя изобретение описывается с конкретной ссылкой на применения в горном деле и обнаружении металлов, оно может быть также применено в других отраслях промышленности или применениях, в которых востребованным является обнаружение проводящих объектов, заключенных в непроводящем материале.
Предпосылки к созданию изобретения
[0003] Последующее обсуждение предшествующего уровня техники предназначено для облегчения понимания изобретения и для того, чтобы дать возможность более полно понять его преимущества. Однако следует признать, что любая ссылка на уровень техники повсеместно в описании не должна трактоваться как явное или подразумеваемое допущение того, что такой уровень техники является широко известным или составляет часть общеизвестного знания в области техники.
[0004] В процессе горнорудного производства не редкостью является то, что «чужеродные» объекты, такие как гайки, болты, штифты, бурильные штанги, штанговая крепь, куски стальных конструкций, деревянные или стальные обрушения или откалывания от горных машин, например зубья ковша экскаватора, обнаруживаются в содержащих минералы рудах и загрязняют их. Хотя более распространенным является то, что эти нежелательные материалы находят в старых горных разработках, они также могут присутствовать и в свежедобытой руде.
[0005] Нежелательные инородные объекты часто называют в горнодобывающей промышленности «не дробимыми» или «инородным металлом», и они представляют существенные и давние проблемы при попадании в производственный поток. Иначе говоря, если их не удалять, относительная твердость и/или форма таких объектов могут нанести серьезный ущерб дробилкам и другим обрабатывающим машинам, например ленточным питателям и конвейерным лентам.
[0006] В типичном производственном потоке горнодобычи руду из рудного тела вырывают или собирают экскаватором на месте разработки и загружают в кузов шахтного самосвала. Шахтный самосвал транспортирует руду к дробилке для первичного дробления, которая дробит руду таким образом, что она сокращается до удобного в обращении размера. Руда может быть подвергнута вторичному дроблению перед тем, как быть погруженной как обычно на конвейерную систему для транспортировки.
[0007] При сбрасывании в первичную дробилку с фиксированным размером горловины любой прочный материал, который больше, чем минимальный просвет в горловине, может заклинить дробилку. Любой длинный и тонкий предмет, такой как буровая штанга или скальный болт, может пробиться через дробилку в бункер внизу, а затем в питатель ленточного конвейера. Особенность сочетания бункера/дробилки проявляет тенденцию выравнивать удлиненные объекты по вертикали, поэтому, когда они могут проходить через дробилку без проблем, они ориентируются таким образом, что «пронзают» и потенциально разрывают ленту питателя внизу или портят главный ленточный конвейер.
[0008] Нормальной практикой является расположение «магнитов для инородного металла» над движущимися конвейерами под дробилкой для притягивания и удаления любых ферромагнитных сталей из продукта. Однако, ясно, что это слишком поздно в потоке продукта с точки зрения минимизации риска для первичной дробилки. Таким образом, желательно, чтобы все материалы, отличные от требуемого продукта, удалялись в некоторой точке перед конечными дробилками или установками по переработке. Кроме того, при таком подходе будет удаляться только материал с магнитными свойствами. Многие электропроводящие материалы могут быть не магнитными.
[0009] Одно решение, предложенное в US 20110074619, использует радар с регулируемой направленностью действия для обнаружения инородного металла внутри порции груза, перевозимого шахтным самосвалом. Однако такие приборы являются сложными, непроверенным, а время подготовки анализа делает достижение детектирования в реальном времени очень трудным.
[0010] Другая система требует отслеживания возможных объектов удержания, таких как механические зубья ковша экскаватора, чтобы идентифицировать, когда объекты смещены и, вероятно, были потеряны в потоке руды. Однако подобные решения имеют ограниченную ценность, поскольку, как очевидно, имеется существенная разница в понимании того, что объект является утерянным, и положительной локализацией его окружения.
[0011] Целью настоящего изобретения является преодоление или существенное улучшение одного или более недостатков предшествующего уровня техники или по меньшей мере создание полезной альтернативы.
Сущность изобретения
[0012] Соответственно, в первом аспекте изобретение предлагает способ обнаружения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения, причем упомянутый способ включает в себя шаги:
сканирования электропроводящих объектов в пределах области обнаружения, в том числе шаги:
генерирования магнитного сигнала в форме магнитного импульса в пределах области обнаружения с помощью средства генерирования магнитного сигнала; и
контроль индуцированного магнитного ответного сигнала в пределах области обнаружения с помощью средства контроля магнитного сигнала; и
анализ индуцированного ответного сигнала для определения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения.
[0013] В другом аспекте изобретение предлагает систему обнаружения с помощью импульсной индукции для обнаружения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения, при этом упомянутая система содержит:
блок управления;
средство генерирования магнитного сигнала для генерирования магнитного сигнала в форме множества магнитных импульсов в пределах области обнаружения;
средство контроля магнитного сигнала для контроля индуцированного магнитного ответа в пределах области обнаружения; и
блок обработки данных для анализа контролируемого магнитного ответного сигнала с целью определения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения.
[0014] Изобретение опирается на магнитный сигнал, индуцирующий электрический ток в пределах электропроводящего объекта во время движения этого объекта через область обнаружения. Ток, в свою очередь, создает индуцированное магнитное поле «ответного сигнала» в объекте, который может быть обнаружен. Следовательно, объект должен содержать электропроводящее вещество. Как правило, электропроводящие объекты представляют собой металлические объекты, которые внедряются или смешиваются с рыхлым рудным или грунтовым материалом. Чаще всего металл является ферромагнитным и включает в себя сплавы железа; однако другие металлы, а при благоприятных условиях другие электропроводящие материалы, могут также быть обнаружены. Способы обработки сигналов в реальном времени могут выявить природу включений, исходя из характера ответного сигнала.
[0015] Предпочтительно область обнаружения расположена рядом с электропроводящим балластом. Предпочтительно область обнаружения частично окружена электропроводящим материалом.
[0016] Предпочтительно область обнаружения находится по меньшей мере частично внутри приемного контейнера, более предпочтительно приемный контейнер изготовлен преимущественно из металла.
[0017] Предпочтительно электропроводящие объекты внедрены в неплотный неэлектропроводящий материал.
[0018] В другом аспекте изобретение предлагает способ обнаружения присутствия электропроводящих объектов, заключенных в добываемую руду и/или грунт внутри экскаваторного ковша, изготовленного преимущественно из металла, причем способ включает в себя шаги:
предоставления наличия экскаваторного ковша для приема материала, при этом ковш имеет зев для загрузки и/или выгрузки добываемой руды и/или грунта из ковша;
сканирования электропроводящих объектов внутри добываемой руды и/или грунта в пределах области обнаружения ковша, используя импульсную индукцию, включая шаги:
генерирования магнитного сигнала в форме магнитного импульса в пределах области обнаружения ковша с помощью средства генерирования магнитного сигнала; и
контроля индуцированного магнитного ответного сигнала в пределах области обнаружения с помощью средства контроля магнитного сигнала; и
анализа индуцированного ответного сигнала для определения присутствия или отсутствия электропроводящих объектов в добываемой руде и/или грунте в пределах области обнаружения.
[0019] Предпочтительно шаг анализа включает в себя предварительное вычисление по меньшей мере одной базисной функции, имеющей ожидаемое различие между присутствием и отсутствием электропроводящих объектов в пределах области обнаружения; и взаимную корреляцию базисной функции с индуцированным ответным сигналом.
[0020] Предпочтительно базисные функции предварительно вычисляют посредством моделирования.
[0021] Предпочтительно базисные функции измеряют, исходя из примера желаемой среды.
[0022] Предпочтительно шаг анализа индуцированного ответного сигнала включает в себя изолирование части индуцированного ответного сигнала в зависимости от заранее заданных параметров сигнала.
[0023] Предпочтительно заранее заданные параметры сигнала указывают на напряжение сигнала между пороговыми значениями.
[0024] Предпочтительно средство генерирования магнитного сигнала и/или средство контроля магнитного сигнала включает в себя рамку передающей антенны, окружающую зев приемного контейнера.
[0025] Предпочтительно рамка передающей антенны является также рамкой принимающей антенны, причем эта рамка определяет область обнаружения.
[0026] Предпочтительно магнитный сигнал включает в себя множество магнитных импульсов в диапазоне частот между ориентировочно 100 и 1000 Гц.
[0027] Предпочтительно множество импульсов сигнала состоит из импульсов противоположной полярности для уменьшения намагниченности приемного контейнера.
[0028] Предпочтительно приемный контейнер изготовлен в целом или преимущественно из металла.
[0029] В другом аспекте изобретение предлагает способ обнаружения и удаления электропроводящих объектов, заключенных в добываемой руде и/или грунте, в производственном потоке горнодобычи, причем способ включает в себя шаги:
выемки порции груза руды и/или грунта с помощью экскаваторного ковша экскаватора;
в процессе выемки, сканирования электропроводящих объектов, заключенных в грузе, в соответствии со способом обнаружения, описанным выше; и
выборочного отведения порции груза из производственного потока, когда в этом грузе обнаруживают металлические объекты.
[0030] В другом аспекте изобретение предлагает систему обнаружения с помощью импульсной индукции для обнаружения присутствия или отсутствия электропроводящих объектов, заключенных в неплотном неэлектропроводящем материале внутри ковша экскаватора, при этом система содержит:
детекторный электронный модуль для генерирования магнитного сигнала и обнаружения ответного сигнала, причем модуль содержит:
средство генерирования магнитного сигнала для генерирования магнитного сигнала в форма множества магнитных импульсов в пределах области обнаружения ковша;
средство контроля магнитного сигнала для контроля индуцированного магнитного ответа в пределах области обнаружения; и
блок обработки данных для анализа контролируемого магнитного ответного сигнала с целью определения присутствия электропроводящих объектов в неплотном материале в пределах области обнаружения;
модуль ковша, содержащий по меньшей мере одну антенную рамку; и
модуль управления, имеющий пользовательский интерфейс для управления системой.
[0031] Предпочтительно модуль пользовательского интерфейса содержит средство индикации для индикации присутствия электропроводящих объектов.
[0032] Предпочтительно сыпучим материалом является добываемая руда и/или грунт.
[0033] Предпочтительно электропроводящие объекты включают в себя металлические объекты или инородный металл.
[0034] Предпочтительно ковш изготовлен преимущественно из металлического материала.
[0035] В другом аспекте изобретение предлагает землеройный экскаватор, содержащий:
экскаваторный ковш для приема порций груза добываемой руды и/или грунта, при этом ковш изготовлен преимущественно из металла и имеет по меньшей мере один зев ковша для загрузки и/или выгрузки добываемой руды и/или грунта из ковша;
систему обнаружения с помощью импульсной индукции для обнаружения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения ковша, при этом система содержит:
детекторный электронный модуль для генерирования магнитного сигнала и обнаружения ответного сигнала, при этом модуль содержит:
средство генерирования магнитного сигнала для генерирования магнитного сигнала в форме множества магнитных импульсов в пределах области обнаружения ковша;
средство контроля магнитного сигнала для контроля индуцированного магнитного ответа в пределах области обнаружения; и
блок обработки данных для анализа контролируемого магнитного ответного сигнала с целью определения присутствия электропроводящих объектов в неплотном материале в пределах области обнаружения;
модуль ковша, содержащий по меньшей мере одну антенную рамку; и
модуль управления, имеющий пользовательский интерфейс для управления системой и отображения системной информации.
[0036] Предпочтительно модуль пользовательского интерфейса содержит индикаторное средство для индикации присутствия металлических объектов.
[0037] Предпочтительно экскаватором является добычной одноковшовый экскаватор.
[0038] Предпочтительно оснащенный аппаратурой ковш имеет днище и периферийную боковую стенку, простирающуюся до периферийного края, который определяет зев ковша, причем днище и периферийная боковая стенка охватывают и определяют внутреннее грузонесущее отделение ковша.
[0039] Предпочтительно боковая стенка содержит внутреннюю поверхность, имеющую паз для приема рамки.
[0040] Предпочтительно рамка удерживается внутри паза неметаллическим и непроводящим держателем.
[0041] Термин «экскаватор» используется в настоящем документе для ссылки на широкий спектр землеройных машин, имеющих приемный контейнер или ковш. Как таковой термин экскаватор предназначен для охвата, но не ограничения, компактных экскаваторов, канатных скребковых экскаваторов (драглайнов), экскаваторов-разрушителей, парового экскаватора, экскаватора типа прямая лопата, погрузчиков и землечерпальных машин.
[0042] Подобным образом термины «инородный металл» и «недробимые» используются в настоящем документе для ссылки на нежелательные посторонние объекты, которые могут оказаться в производственном потоке горнодобычи.
[0043] Если контекст явно не требует иного, повсеместно в описании и формуле изобретения слова «содержать», «содержащий» и подобные предназначены для толкования в инклюзивном смысле, в отличие от исключительного или исчерпывающего смысла; то есть в смысле «включая, но не ограничиваясь этим».
Краткое описание чертежей
[0044] Предпочтительные варианты осуществления изобретения будут теперь описаны только в качестве примера со ссылкой на прилагаемые чертежи, на которых:
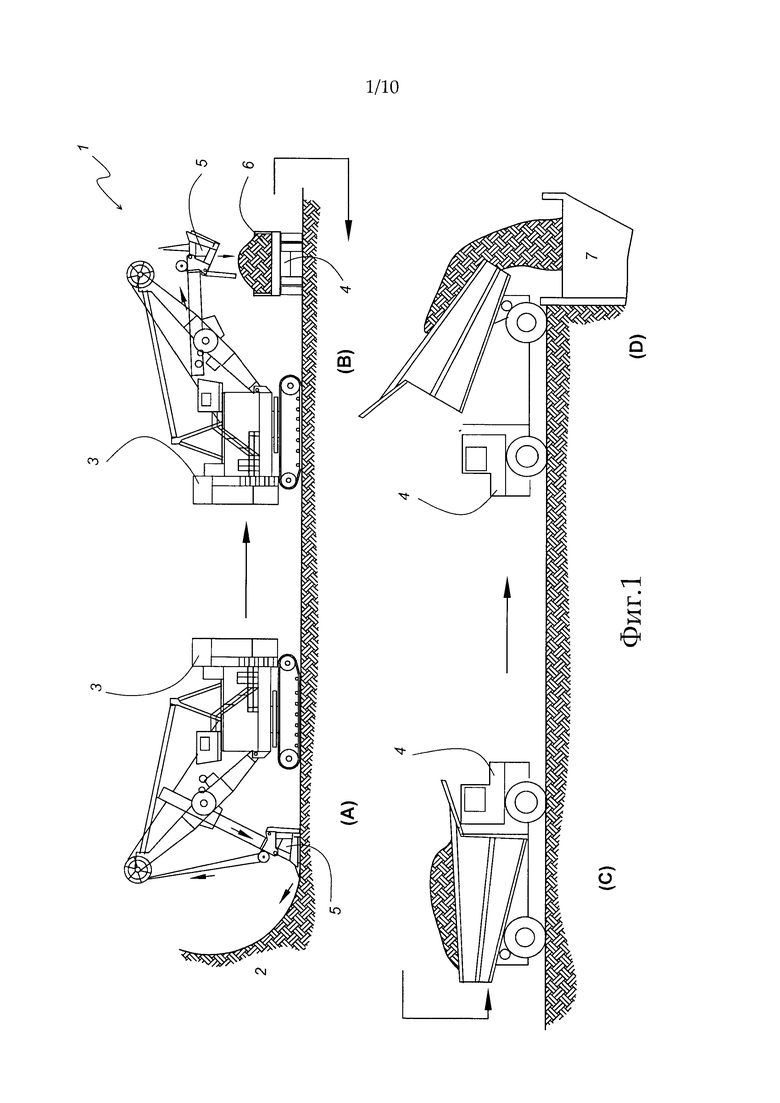
[0045] Фиг. 1 представляет схематическое изображение примера производственного потока горнодобычи;
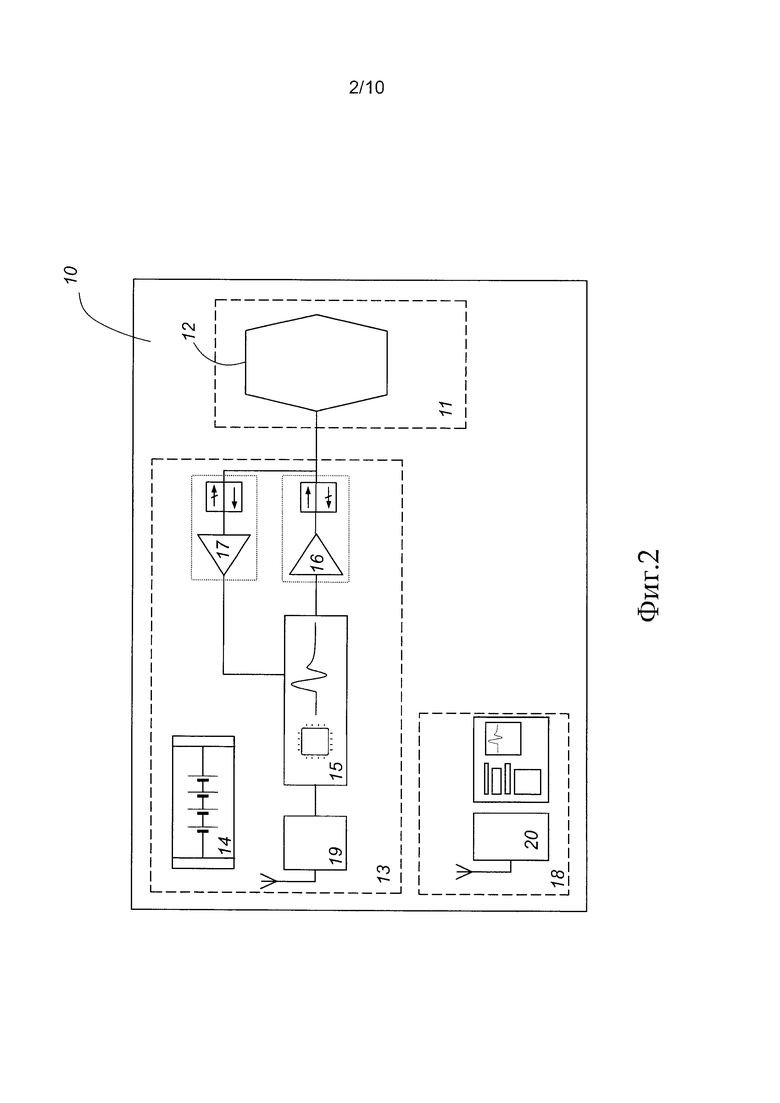
[0046] Фиг. 2 представляет схематическое изображение типичной электронной диаграммы процесса для системы обнаружения металлов с помощью импульсной индукции в соответствии с изобретением;
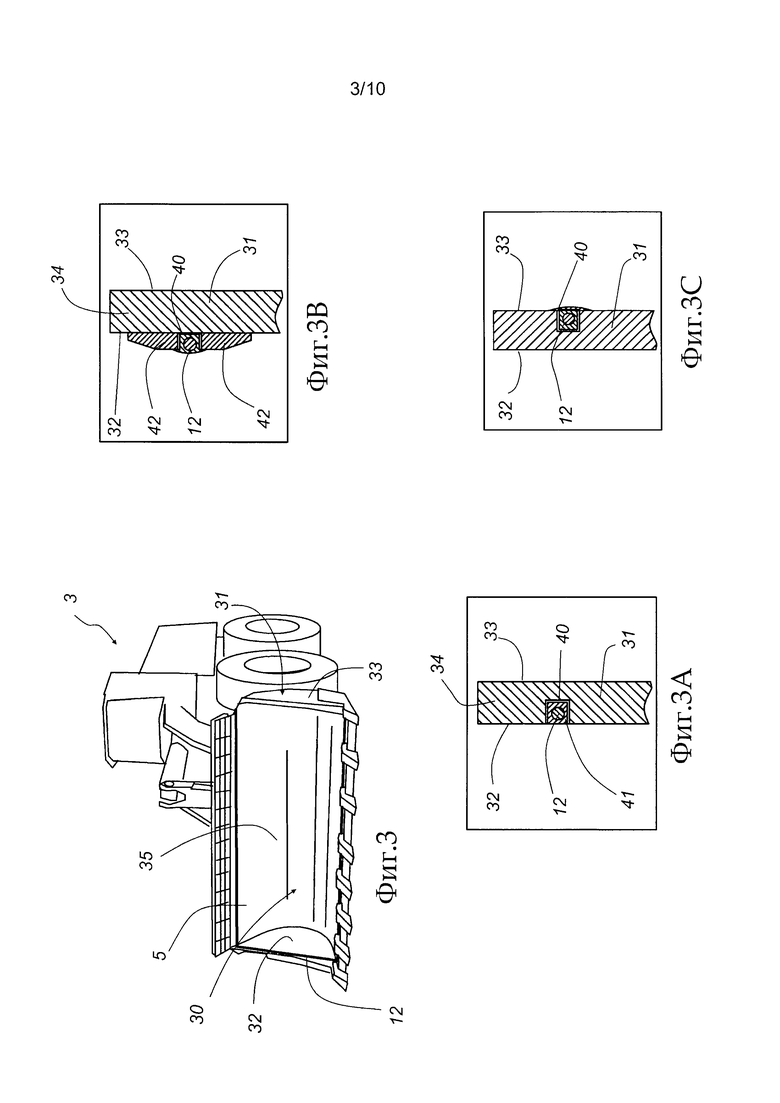
[0047] Фиг. 3 представляет иллюстративное изображение экскаваторного ковша, указывающее на приблизительное положение установки антенной рамки в соответствии с изобретением;
[0048] Фиг. 3А представляет подробный схематический вид поперечного сечения антенной рамки, установленной внутри боковой стенки ковша в соответствии с вариантом осуществления изобретения;
[0049] Фиг. 3В представляет подробный схематический вид поперечного сечения антенной рамки, установленной внутри боковой стенки ковша в соответствии с альтернативным вариантом осуществления изобретения;
[0050] Фиг. 3С представляет подробный схематический вид поперечного сечения антенной рамки, установленной на внешней стороне боковой стенки ковша в соответствии с альтернативным вариантом осуществления изобретения;
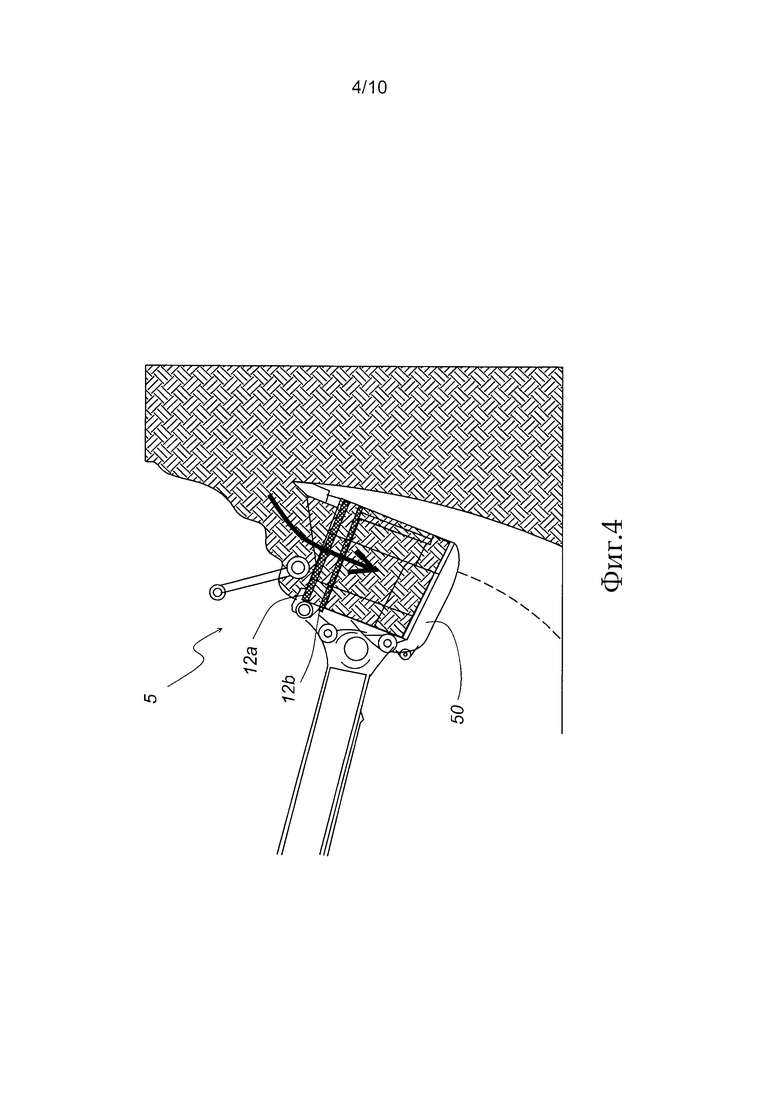
[0051] Фиг. 4 представляет иллюстративное изображение ковша механической лопаты, имеющей систему обнаружения металлов с помощью импульсной индукции, которая снабжена отдельными рамками передающей и принимающей антенн в соответствии с изобретением;
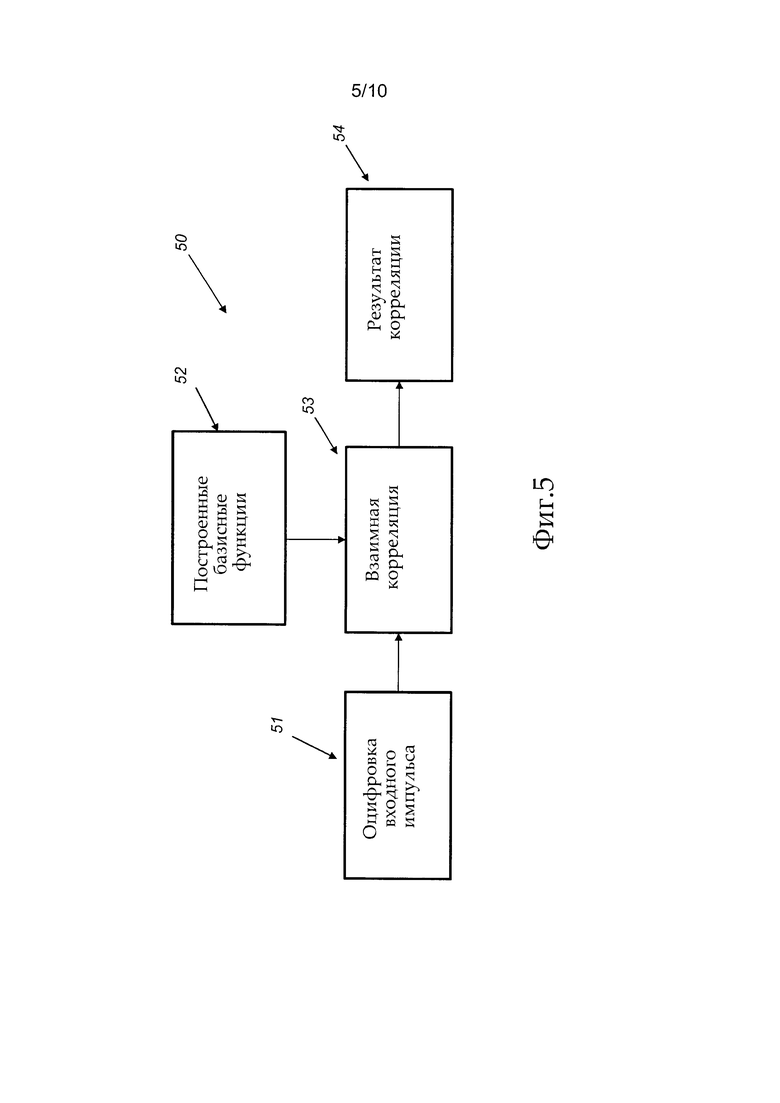
[0052] Фиг. 5 представляет схематическое изображение одной формы подходящей последовательности обработки внутри блока DSP в соответствии с изобретением;
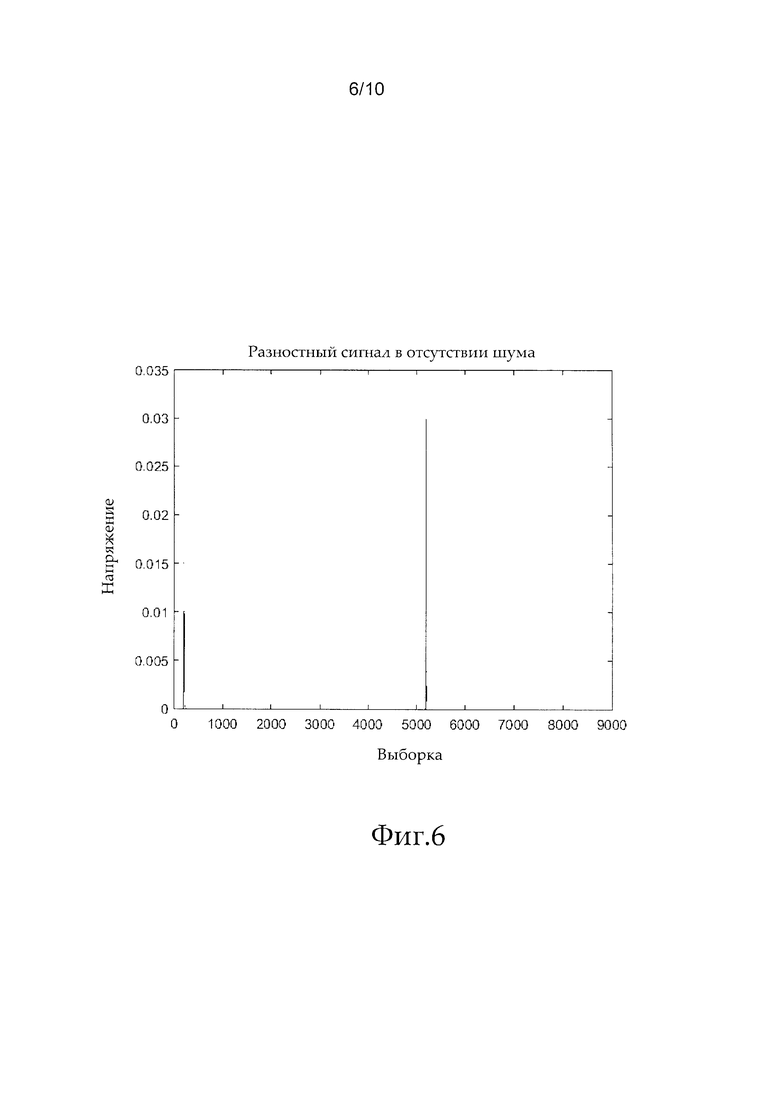
[0053] Фиг. 6 представляет графическое изображение разницы между двумя сигналами на основе репрезентативного моделирования, когда отсутствует шум;
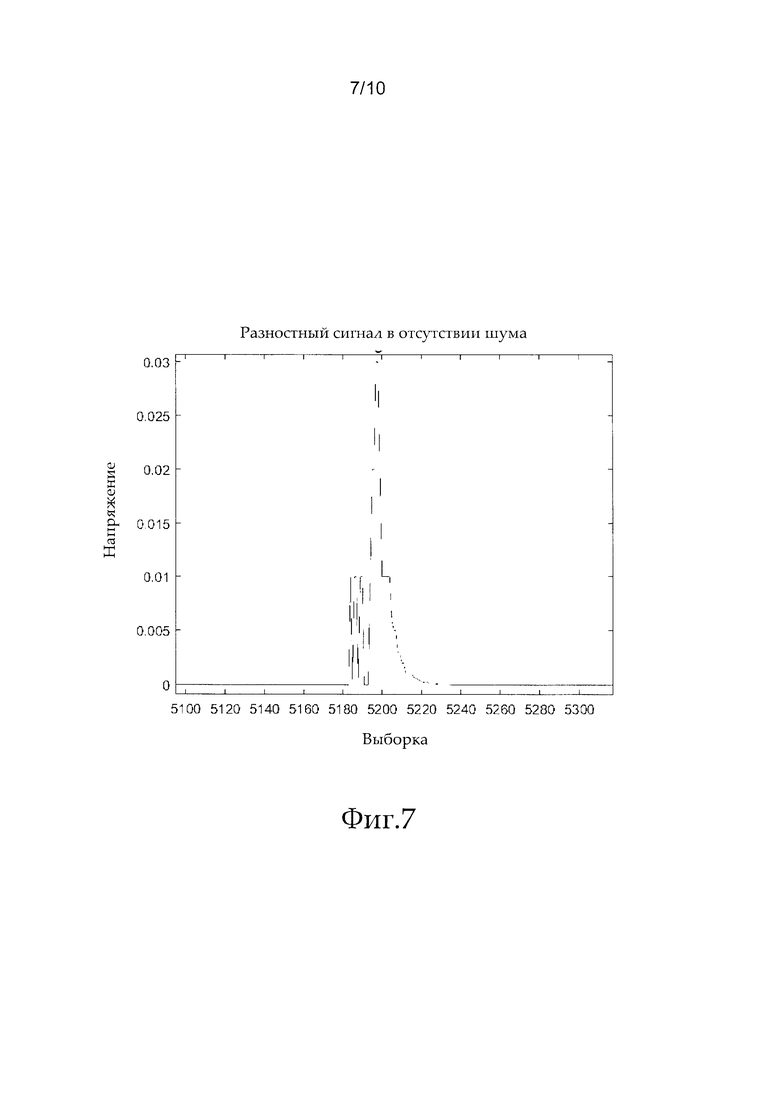
[0054] Фиг. 7 представляет подробное графическое изображение структуры разностного сигнала;
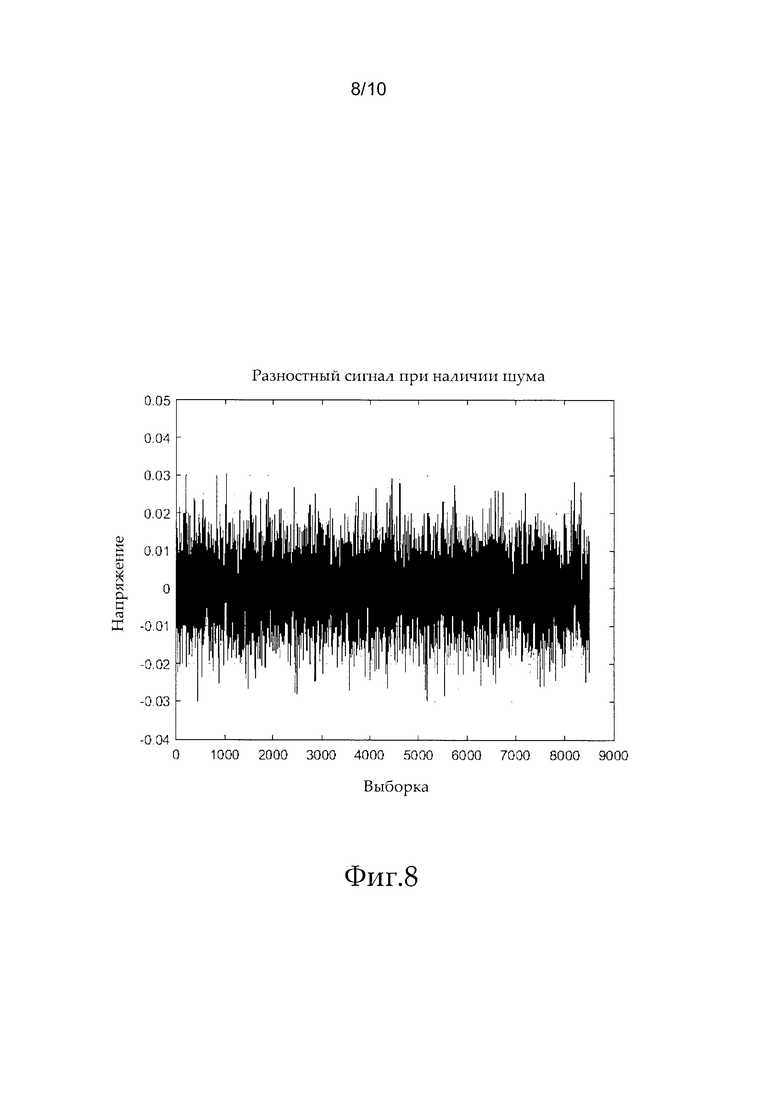
[0055] Фиг. 8 представляет подробное графическое изображение результирующего разностного сигнала в присутствии шума;
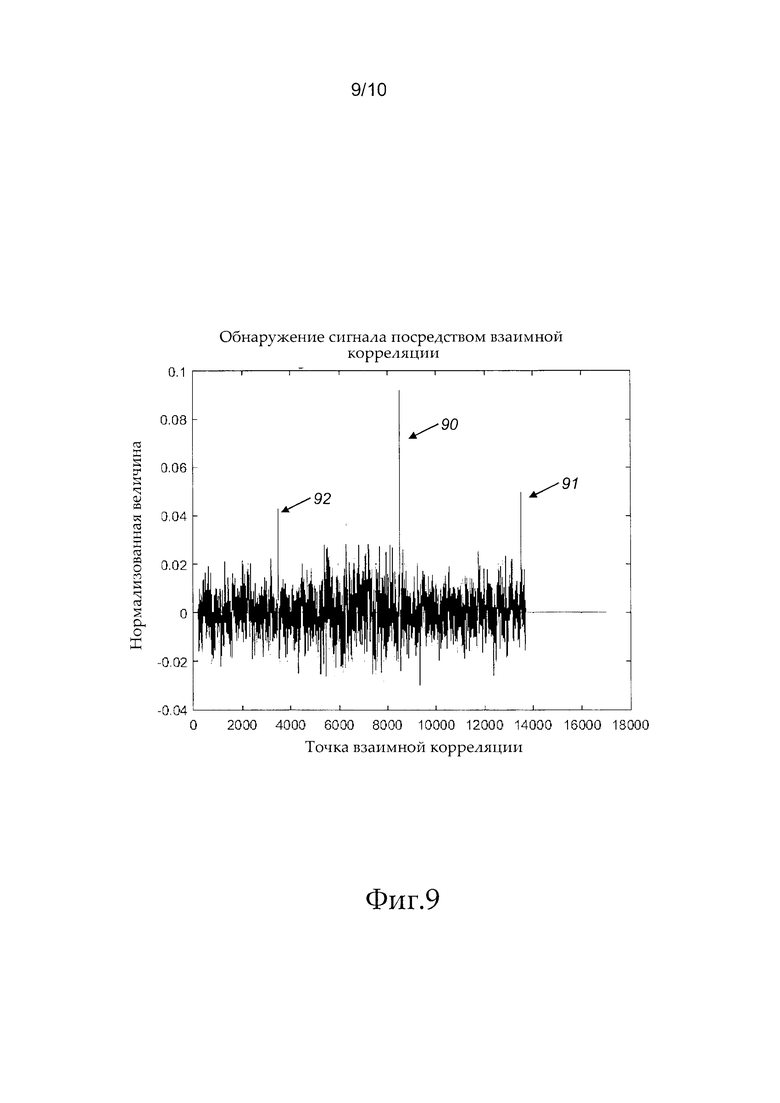
[0056] Фиг. 9 представляет графическое изображение сигнала данных на фиг. 6, взаимно коррелированного с шумовым входным сигналом на фиг. 8; и
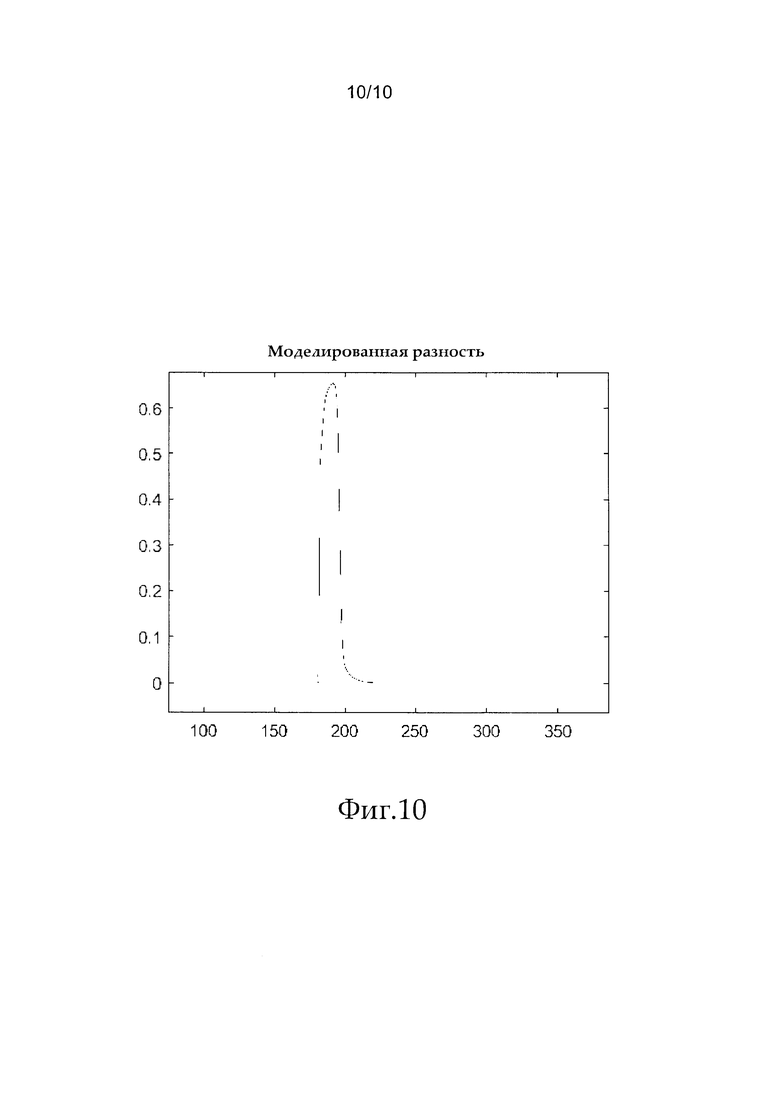
[0057] Фиг. 10 представляет графическое изображение одной формы подходящей базисной функции, включающей в себя ожидаемую моделируемую разность.
Предпочтительные варианты осуществления изобретения
[0058] Часть примерного производственного потока 1 горнодобычи представлена на фиг. 1. Руда из рудного тела 2 вырывается экскаватором 3 и сбрасывается на шахтный самосвал 4. Экскаватор 3 может представлять собой добычной одноковшовый экскаватор, погрузчик или любой другой вид землеройной машины. В любом случае экскаватор 3 имеет ковш 5 для забора порций груза руды из рудного тела для загрузки в кузов 6 шахтного самосвала 4. Шахтный самосвал 4 транспортирует руду к первичной дробилке 7, где он разгружается в питатель дробилки. Соответственно, шагами от (А) до (D), показанными на фиг. 1, являются
(A) Выемка грунта экскаватором для заполнения экскаваторного ковша;
(B) Загрузка шахтного самосвала;
(C) Транспортировка; и
(D) Разгрузка на первичной дробилке.
[0059] Следует иметь в виду, что вышеуказанный производственный поток является только одним примером горнодобывающих работ. В других производственных потоках экскаватор может загружать руду в другие виды транспортных средств, например конвейер или железнодорожные вагоны. В других вариантах экскаватор может загружать руду непосредственно в обрабатывающее оборудование, такое как дробилка или подобное.
[0060] В любом случае следует понимать, что для предотвращения повреждения первичной дробилки и конвейеров, не дробимый материал и в частности инородный металл должен быть обнаружен и удален из производственного потока до шага (D). Однако добавление средства обнаружения на любом из вышеуказанных шагов потока представляет проблемы, в частности если добавление инфраструктуры должно быть минимизировано.
[0061] Например, в то время как имеется возможность использовать предварительный конвейер и существующие «магниты для инородного металла» непосредственно перед дробилкой и для специфической цели обнаружения и удаления инородных металлов, это потребует установки еще одного шага в обработке и дополнительной инфраструктуры. Более того, обнаружение и извлечение должно происходить почти одновременно, и размер не дробленых частиц руды будет являться помехой.
[0062] В широком смысле способ и система по изобретению включают в себя обнаружение электропроводящих объектов, заключенных в порцию груза минеральной руды/грунта в пределах области обнаружения в приемном контейнере для земляных работ, путем анализа магнитного ответа системы под воздействием магнитного сигнала.
[0063] Импульс магнитного сигнала проецируется в область обнаружения приемного контейнера с помощью антенной рамки, окружающей область обнаружения. Магнитный ответ системы отслеживается с помощью той же или другой антенной рамки.
[0064] В одном виде способ использует импульсную индукцию, которая распознает, что детектирующая антенна будет демонстрировать немного различные характеристики индуктивности и, следовательно, характеристика затухания индуцированного импульсного сигнала будет отличаться в зависимости от того, имеется ли электропроводящий объект в области обнаружения. С помощью подходящих способов обработки сигналов разница может быть идентифицирована и использована для определения присутствия или отсутствия металлического объекта в пределах приемного контейнера для земляных работ.
[0065] Хотя изобретение позволяет обнаружить любой электропроводящий материал в области обнаружения, как правило, электропроводящие объекты выполнены из металлов. Таким образом, следует понимать, что если не установлено иное, ссылка на металлические объекты, или «инородный металл», в настоящем документе может представлять любой объект, выполненный в целом или частично из электропроводящего материала.
[0066] С точки зрения процесса производства, если отсев инородного металла производится в процессе загрузки приемного контейнера или в то время, когда ковш полный, это позволяет направлять груз, как это необходимо. Например, если инородный металл обнаруживают в порции груза в приемном контейнере, эта порция груза может быть выборочно отведена из производственного потока.
[0067] Изобретение использует преимущество движения электропроводящих объектов через область обнаружения, в то время, когда они загружаются или в приемный контейнер или выгружаются из него. Движение проводящих объектов в пределах области обнаружения может усилить ответный сигнал и/или создать возможности кратной выборки в случае импульсного сигнала. Это также позволяет объему области обнаружения в пределах приемного контейнера быть меньше объема самого приемного контейнера.
[0068] Система может быть подогнана к любому приемному контейнеру для перевозки руды в пределах производственного потока рудных ископаемых. Например, система может быть подогнана к приемному контейнеру для землеройных машин, например ковша экскаватора, или приемному контейнеру транспортных машин, например кузову шахтного самосвала.
[0069] Преимущество подгонки системы к экскаваторному ковшу, а не к кузову шахтного самосвала заключается в том, что поскольку один экскаватор, как правило, обслуживает множество шахтных самосвалов, то требуется только одна система обнаружения. Другое преимущество отсева инородного металла в процессе земляных работ состоит в том, что отбраковывается меньшее количество руды, если и когда обнаруживается положительная индикация. С другой стороны, если отсев проводят при загрузке в шахтный самосвал или во время перевозки, весь груз самосвала должен быть забракован.
[0070] Кроме того, в некоторых производственных потоках экскаватор используют для перемещения руды непосредственно от штабеля руды в дробилку, конвейер, железнодорожный вагон или т.п. без необходимости перевозки самосвалами.
[0071] Следовательно, в данном варианте осуществления изобретение предполагает введение системы обнаружения электропроводящих объектов в экскаваторный ковш 5, так что металлические объекты могут быть обнаружены в процессе выемки грунта (А), поскольку они поступают в экскаваторный ковш наряду с грузом руды. В случае если инородные металлические объекты идентифицируются в грузе руды, порция груза в ковше может быть перенаправлена таким образом, что инородные металлические объекты не попадут в производственный поток руды.
[0072] Просто-напросто, когда в экскаваторном ковше обнаруживается подозрительный инородный металлический объект (объекты), оператор экскаватора предупреждается системой о том, что груз может быть выгружен в альтернативном местоположении, а не загружен на шахтный самосвал, направляющийся к дробилке, другое транспортное средство или обрабатывающие машины, такие как дробилка.
[0073] Система может быть подогнана к широкому ассортименту экскаваторов, включая землеройные механизмы, погрузчики и добычные экскаваторы.
[0074] Хотя изобретение предлагает существенные преимущества с точки зрения производственных процессов, существуют значительные технические проблемы, которые необходимо решить, чтобы ввести обнаружение с помощью импульсной индукции в экскаваторный ковш.
[0075] Первая трудность заключается в том, что хотя системы металлодетекции известны, экскаваторные ковши изготавливаются на данном этапе их развития преимущественно, если не полностью, из ферромагнитной стали. Ясно, что система контроля должна быть в состоянии отличать ответный сигнал от сравнительно небольшого нежелательного проводящего объекта от любого ответа от сравнительного массивного электропроводящего балласта, в данном случае крупного ферромагнитного приемного контейнера, окружающего область обнаружения. Современные способы металлодетекции, которые включают в себя контроль изменения тока через рамку относительно времени, признаются как несовместимые с такими применениями.
[0076] В предпочтительном виде изобретение использует обнаружение с помощью импульсной индукции. Системы обнаружения с помощью импульсной индукции направляют короткий всплеск или «импульс» электрического тока через антенную рамку. Это создает соответствующий импульс магнитного поля в объекте, который детектируется, что в свою очередь генерирует соответствующий намного более слабый и с задержкой во времени ответный импульс на рамке приемной антенны или магнитометре. Этот очень слабый ответный сигнал обнаруживается и усиливается высокочастотным малошумящим усилителем (low noise amplifier) (LNA). Усиленный сигнал оцифровывается и обрабатывается способами цифровой обработки сигналов, которые определяют ответный сигнал для идентификации проводящего материала в области обнаружения. В одном варианте осуществления только часть ответного сигнала усиливается, оцифровывается и обрабатывается способами цифровой обработки данных. Эта часть изолируется на основе заранее заданных параметров, например пороговых значений напряжения.
[0077] Импульс повторяется с интервалами в общем между ориентировочно 100-1000 Гц.
[0078] В одном варианте осуществления разрешается рост «импульса» электрического тока до фиксированного значения в антенной рамке. Затем он резко выключается, в результате чего высокое напряжение (например, порядка 2000 В) индуцируется между клеммами рамки. Это индуцированное «ответное» напряжение будет поляризоваться в противоположном направлении к исходному приложенному напряжению. Рамка замыкается электрически с помощью сопротивления нагрузки, так что энергия, запасенная в рамке, рассеивается с экспоненциальной скоростью. Характеристика затухания рассеиваемой энергии или ответного сигнала будет зависеть от индукционных характеристик рамки и в частности от того, находится ли поблизости от нее электропроводящий объект. Только когда затухающий ответный сигнал на сопротивлении нагрузки упадет до заранее заданного значения (например, ориентировочно 0,7 В), этот сигнал усиливается и обрабатывается.
[0079] В качестве примера схематическая электронная схема системы 10 обнаружения с помощью импульсной индукции показана на фиг. 2. Система может быть разделена на три модуля. Модуль 11 системы ковша содержит антенную рамку или магнитометр 12, установленный так, чтобы окружать область обнаружения или зев приемного контейнера или ковша. Антенна 12, которая может состоять из множества катушечных обмоток, окружающих область обнаружения (например, 5-30 обмоток), подключена к электронному модулю 13 металлодетектора для генерирования магнитного сигнала и детектирования ответного сигнала. Электронный модуль 13 содержит блок 14 питания, подключенный к блоку 15 цифрового процессора, содержащему цифровой сигнальный процессор (digital signal processor) (DSP). Передатчик 16 мощности передает импульс электрического тока в рамку антенны для генерирования соответствующего импульса магнитного поля в антенне.
[0080] Обнаруженный ответный электромагнитный сигнал усиливается малошумящим усилителем (LNA) 17, подключенным к антенне. Этот сигнал подается обратно в DSP 15 для фильтрации и анализа. Модуль 18 управления, содержащий пользовательский интерфейс в кабине оператора, предусмотрен для управления системой и отображения системной информации для оператора землеройной машины.
[0081] Следует отметить, что вышеописанная система предназначена для того, чтобы представлять пример системы обнаружения с помощью импульсной модуляции. Изобретение не ограничено конкретной конфигурацией описанных системы и модулей. Различные компоненты системы могут быть заменены или реконфигурированы в объеме изобретения.
[0082] Например, в одном варианте осуществления изобретение предлагает беспроводную передачу данных 19, 20 туда и обратно для пользовательского интерфейса и модуля 18 управления в кабине оператора, так что электронный модуль 13 и модуль 11 ковша могут быть установлены на ковше/стреле экскаватора и модуле пользовательского интерфейса, подключенном беспроводным образом к нему.
[0083] Дополнительной проблемой с размещением системы в экскаваторном ковше является то, что, будучи ферромагнитным материалом, сталь ковша имеет склонность к намагничиванию при многократном воздействии магнитных полей. То есть, в конечном счете стальной ковш будет создавать полупостоянное магнитное смещение, согласованное с импульсами магнитного поля, которые создаются рамкой. Даже небольшое магнитное смещение может повлиять на процесс обнаружения, скрадывая индуцированные магнитные поля от объектов из инородных металлов внутри ковша.
[0084] Чтобы решить эту проблему, изобретение включает в себя способ размагничивания стали посредством размагничивания, при котором магнитное поле периодически изменяется по полярности путем изменения тока в рамке. Предпочтительно не обратное поле балансируется обратным полем, тем самым устраняя накопление магнитного смещения. Очевидно, одним способом балансировки обратного и не обратного полей является использование импульсов, которые чередуются по полярности. В этом отношении, как показано на фиг. 2, рамка управляется схемой Н-моста, так что ток в антенной рамке периодически изменяются между импульсами. В свою очередь, соответствующие импульсы магнитного поля, генерируемые антенной рамкой, периодически изменяются по магнитной полярности, тем самым нейтрализуя любую тенденция к намагничиванию стали.
[0085] В варианте осуществления, проиллюстрированном схематически на фиг. 2, антенная рамка 12 используется как для подачи магнитного сигнала, так и для обнаружения магнитного ответного сигнала. Однако в других вариантах осуществления предлагаются одна или более отдельных рамок передающей и принимающей антенн. В других вариантах осуществления один или более магнитометров или СКВИДов (SQUID - Super conducting Quantum Interference Device - сверхпроводящий квантовый интерференционный датчик) в матрице могут использоваться для того, чтобы обнаруживать возвратный магнитный отклик вместо или в дополнение к рамке.
[0086] Другой существенной проблемой, подлежащей разрешению при установке системы обнаружения с помощью импульсной индукции в экскаваторный ковш, имеет отношение к практической установке. То есть, экскаваторные ковши обычно изготавливаются из стали, т.к. это чрезвычайно прочный материал, способный выдерживать тяжелые условия эксплуатации и обилие земляных работ. С другой стороны, антенная рамка и соответствующая электроника представляют собой относительно легковесный и хрупкий компонент.
[0087] Для того чтобы защитить рамку, необходимо предусмотреть соответствующее экранирование. Однако для антенной рамки требуется неметаллическое окно, позволяющее магнитному полю проникать в центр ковша. Более того, вокруг катушки должна существовать «свободная от металла зона».
[0088] Изобретение, следовательно, предлагает средства для установки и экранирования антенной рамки или множества рамок вокруг либо внутренней части, либо наружной части ковша.
[0089] В одном виде изобретения ковш специально разработан для встраивания рамочной антенны. Как видно на фиг. 3, экскаватор или погрузчик 3 включает в себя ковш 5, имеющий днище 30 и периферийную боковую стенку 31, которая имеет внешнюю и внутреннюю поверхности 32&33. Днище и боковые стенки, окружающие и определяющие внутреннее грузонесущее отделение для переноски груза ковша для удержания и размещения грунта и/или минеральной руды или другого насыпного материала. Боковая сторона 31 имеет периферийный край, определяющий зев 35 ковша, через который материал может быть загружен и выгружен из ковша.
[0090] Предпочтительно, рамка 12 может быть установлена на периферийном крае 34 или рядом с ним таким образом, что область обнаружения находится в зеве ковша и материал должен пройти через область обнаружения для того, чтобы попасть в ковш или выйти из него.
[0091] Как видно подробно на фиг. 3А ковша, показанного на фиг. 3, ковш спроектирован и изготовлен с одним или более монтажными пазами 40 во внутренней стенке 32 боковой стенки 31 ковша. Монтажный паз 40 выполняется в виде канала в боковой стенке.
[0092] Антенная рамка 12 фиксируется и удерживается внутри паза 40 с помощью неметаллического и непроводящего держателя 41. Держатель защищает рамку от ударов и трения руды, загружаемой ковшом. Открытая поверхность держателя в общем выполнена заподлицо или по существу заподлицо с поверхностью внутренней стенки, тем самым минимизируя воздействие как на рамку, так и на держатель.
[0093] Держатель может быть выполнен из любого непроводящего материала, например износостойких пластмасс или резин, керамики, ферритов и/или композитов. Держатель может быть выполнен в виде отдельной детали или множества деталей. Он может быть зафиксирован внутри паза средствами фиксации, в том числе клеями, резьбовыми крепежными деталями или защелкивающимися соединениями.
[0094] В другом варианте осуществления изобретение предлагает систему модернизации существующих экскаваторных ковшей. Однако в таких случаях может оказаться невозможным создать монтажный паз во внутренней стенке. Фиг. 2В представляет детальное изображение ковшовой боковой стенки 31, модернизированной в плане антенной рамки 12. На чертеже параллельно расположенные защитные накладки 42 прикреплены к внутренней стенке ковша для образования монтажного паза 40 между ними. Накладки могут быть изготовлены из стали и приварены и закреплены болтами к стенке ковша. Накладки могут иметь наклонную поверхность для отклонения материала и грунта над пазом.
[0095] В другом виде, подробно показанном на фиг. 3С, антенная рамка расположена на внешней стенке 33 ковша, тем самым требуя меньшей защиты. В этом варианте осуществления стенка ковша, по меньшей мере примыкающая к рамке, может быть изготовлена из цветного металла, чтобы не вступать во взаимодействие с магнитным полем. В другом варианте осуществления периферическая кольцевая секция стенки ковша может быть изолирована от остальной части стенки ковша и тем самым формировать рамку.
[0096] Некоторые экскаваторы, такие как добычные экскаваторы в виде механической лопаты, показанные на фиг. 4, могут иметь открываемое днище 50, чтобы дать возможность выгружать материал в ковше через днище. В этом показанном варианте ковш 5 механической лопаты должен быть снабжен рамкой 12а передающей антенны для передачи импульсного магнитного поля и отдельной рамкой 12b принимающей антенны для отслеживания обратного сигнала.
[0097] Фиг. 4 также отображает ковш в процессе земляных работ, посредством чего грунт и/или минеральная руда проходят через антенные рамки 12а и 12b и в ковш.
[0098] Обратимся теперь к фиг. 5, где представлен один вид подходящей последовательности обработки внутри DSP-блока для идентификации различий, указывающих на присутствие инородного материала.
[0099] В соответствии с современными возможностями DSP предполагается, что предоставляется частота выборки по меньшей мере 1 МГц с размером выборки 12 бит.
[00100] Последовательность 50 обработки, показанная на фиг. 5, включает в себя оцифровку контролируемого входного ответного сигнала 51, который взаимно коррелируется 53 с некоторыми заранее разработанными базисными функциями 52 для получения коррелированного выхода 54. Базисными функциями являются такие, которые построены для моделирования воздействий магнитных изменений, являющихся следствием введения проводящих объектов. Базисные функции могут быть идеально построены путем моделирования, однако могут также использоваться калибровочные базисные функции.
[00101] Взаимная корреляция действует, чтобы помочь в идентификации любого структурированного сигнала из фонового шума, присущего входному сигналу.
[00102] Например, фиг.6 иллюстрирует разницу между двумя ответными сигналами от репрезентативного моделирования, где шум отсутствует и индуктивность изменяется на ориентировочно 0,1%. Структура разностного сигнала далее иллюстрируется на фиг. 7, который показывает увеличенную часть сигнала с разрешением 12 бит, выбранным на частоте 1 МГц.
[00103] Однако при наличии шума (например, 20 мВ пикового напряжения по Гауссу), вероятно, сигнал будет забит шумом. Фиг. 8 иллюстрирует результирующий разностный сигнал при наличии шума.
[00104] Благодаря использованию взаимной корреляции построенной базисной функции и входного ответного сигнала с шумом может быть обнаружено небольшое изменение в индуктивности. Фиг. 9 показывает один примерный результат, иллюстрирующий пример пика 90 взаимной корреляции. Использование подобных способов позволяет нам обнаруживать сигнал при наличии чрезмерного шума. Пример на фиг. 9 иллюстрирует изображение на фиг.6, взаимно коррелированное с входным сигналом с шумом на фиг. 8.
[00105] Три пика 90, 91 и 92 возникают, т.к. свертка свертывает две базисные функции с фазовым разделением с сигнатурой с двумя подобными сигнатурами в ней.
[00106] Фиг. 10 иллюстрирует одну форму подходящей базисной функции, включая ожидаемую смоделированную разность, для использования со сверткой.
[00107] Повышение частоты выборки (например, 3 МГц), достоверности выборки или уменьшения минимального уровня шума приведет к улучшенным результатам. Кроме того, желательным является стабильность температуры датчика.
[00108] Следует понимать, что настоящее изобретение предлагает систему и способ для обнаружения электропроводящих объектов и инородного металла в производственном потоке горнодобычи. Система может равным образом быть переоборудована применительно к существующим экскаваторам, так как она может быть установлена в новых специально изготовленных конструкциях ковша. Это не требует существенной дополнительной инфраструктуры.
[00109] Следует понимать, что в этих и других отношениях изобретение представляет практическое и существенное улучшение по сравнению с предшествующим уровнем техники.
[00110] Если иное специально не оговорено, как очевидно из последующих обсуждений, следует понимать, что повсеместно в обсуждениях в описании использование терминов, таких как «обработка», «вычисление», «расчет», «определение», «анализ» или подобных, относится к действию и/или процессам компьютера или вычислительной системы, или подобного электронного вычислительного устройства, которые воздействуют на и/или трансформируют данные, представленные как физические, например электронные, величины, в другие данные, подобным образом представленные как физические величины.
[00111] Аналогичным образом, термин «процессор» или цифровой сигнальный процессор (Digital Signal Processor) (DSP) может относиться к любому устройству или части устройства, которое обрабатывает электронные данные, например, из регистров и/или памяти, для преобразования электронное данные в другие электронные данные, которые, например, могут сохраняться в регистрах и/или памяти. «Компьютер», «вычислительная машина» или «вычислительная платформа» могут включать в себя один или более процессоров. Термин «преобразовывать в цифровой форме» может относиться к процессу конвертации аналогового сигнала в поток дискретных чисел, которым можно управлять с помощью DSP. Последовательные команды, установленные для процессора, в общем известны как программное обеспечение.
[00112] Аналогичным образом, следует понимать, что в вышеуказанном описании примерных вариантов осуществления различные признаки изобретения иногда группируются вместе в одном варианте осуществления, чертеже или его описании с целью упорядочивания описания и оказания помощи в понимании одного или нескольких разных аспектов изобретения. Способ раскрытия, однако, не должен интерпретироваться как отражающий изобретение, в котором заявленное изобретение требует большего количества признаков, чем явно указано в каждом пункте изобретения. Наоборот, как отображает последующая формула изобретения, аспекты изобретения заключаются в меньшем, чем все, количестве признаков одного вышеописанного раскрытого варианта осуществления. Таким образом, формула изобретения, следующая за подробным описанием, настоящим явно включается в это подробное описание, при этом каждый пункт формулы изобретения сам по себе является отдельным вариантом осуществления этого изобретения.
[00113] Более того, хотя некоторые варианты осуществления, описанные в настоящем документе, содержат некоторые, но не другие признаки, входящие в состав других вариантов осуществления, комбинации признаков разных вариантов осуществления предназначены для того, чтобы находиться в пределах объема изобретения, и образуют разные варианты осуществления, как будет понятно специалистам в области техники. Например, в последующей формуле изобретения любой из заявленных вариантов осуществления может быть использован в любой комбинации.
[00114] Кроме того, некоторые варианты осуществления описываются в настоящем документе в виде способа или комбинации элементов способа, которые могут быть реализованы процессором компьютерной системы или другими средствами по выполнению этой функции. Так, процессор с необходимыми командами для выполнения такого способа или элемента способа формирует средство для выполнения способа или элемента способа. Кроме того, элемент, описанный в настоящем документе, варианта осуществления устройства является примером средства для выполнения функции, выполняемой этим элементом с целью выполнения изобретения.
[00115] В описании, предложенном в настоящем документе, изложены многочисленные конкретные детали. Однако следует понимать, что варианты осуществления изобретения могут быть реализованы без этих конкретных деталей. В других примерах известные способы, структуры и способы были показаны подробно, чтобы не заслонять понимания этого описания.
[00116] Аналогичным образом, следует заметить, что связанный термин при использовании в формуле изобретения не должен интерпретироваться как ограниченный только прямыми связями. Могут использоваться термины «связанный» и «соединенный», наряду со своими производными. Следует понимать, что эти термины не предполагают для использования в качестве синонимов друг для друга. Так, объем выражения об устройстве А, связанного с устройством В, не должен ограничиваться устройствами и системами, в которых выход устройства А прямо соединен со входом устройства В. Это означает, что существует путь между выходом А и входом В, который может быть путем, охватывающим другие устройства или средства. «Связанный» может означать, что два или более элементов либо находятся в прямом или электрическом контакте, либо два или более элементов не находятся в прямом контакте друг с другом, но однако все же действуют совместно или взаимодействуют друг с другом.
[00117] Таким образом, хотя было описано то, что считается предпочтительными вариантами осуществления изобретения, специалисты в данной области техники признают, что другие и последующие модификации могут быть произведены по отношению к ним в пределах сущности изобретения, и предполагается заявлять право на все такие изменения и модификации, которые находятся в пределах объема изобретения. Например, любые приведенные выше формулировки просто представляют собой процедуры, которые могут использоваться. Функции могут быть добавлены или удалены из блок-схем, а операции могут меняться местами между функциональными блоками. Шаги могут быть добавлены или удалены применительно к способам, описанным в пределах объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВА, СПОСОБЫ И СИСТЕМЫ МОНИТОРИНГА СОСТОЯНИЯ ИЗНАШИВАЕМОГО КОМПОНЕНТА | 2020 |
|
RU2837381C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ КОВША ЭКСКАВАТОРА ДЛЯ БЛОЧНОЙ МОДЕЛИ ГОРНОГО ПРЕДПРИЯТИЯ | 2024 |
|
RU2831442C1 |
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода и способ для его осуществления | 2019 |
|
RU2710233C1 |
| СИСТЕМА ИЗОБРАЖЕНИЯ СВЕРХУ ДЛЯ ЭКСКАВАТОРА | 2013 |
|
RU2625438C2 |
| МЕЧЕНЫЙ ЭЛЕМЕНТ ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ | 2017 |
|
RU2749318C2 |
| МОБИЛЬНАЯ РАДИОЛУЧЕВАЯ СИСТЕМА ОБНАРУЖЕНИЯ | 1998 |
|
RU2155382C2 |
| Способ обнаружения электропроводящих тел в потоке и устройство для его осуществления | 1979 |
|
SU900855A1 |
| Система для автоматического управления экскаваторноавтомобильным комплексом | 1975 |
|
SU577534A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
Изобретение относится к обнаружению электропроводящих объектов, таких как инородный металл, заключенных в порцию груза минеральной руды/грунта в пределах области обнаружения приемного контейнера для земляных работ. Сущность: подают импульсы в проводящую рамку вокруг области обнаружения. Получают выборку электромагнитного затухающего отклика на импульс. Производят взаимную корреляцию выборки затухающего отклика с предварительно построенной базисной функцией, моделирующей эффекты от введения проводящих объектов в область обнаружения, для получения коррелированного выходного сигнала. Анализируют коррелированный выходной сигнал на пиковые значения для получения индикации присутствия или отсутствия электропроводящих объектов в пределах области обнаружения. 4 н. и 23 з.п. ф-лы, 10 ил.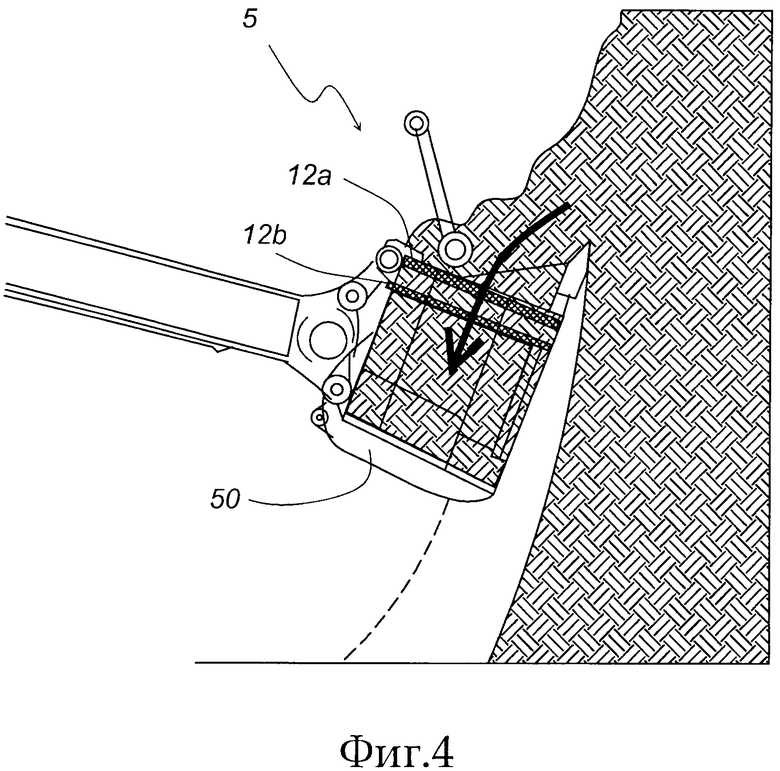
1. Способ обнаружения присутствия или отсутствия электропроводящих объектов в пределах области обнаружения, при этом способ включает:
подачу импульсов в проводящую рамку вокруг области обнаружения;
получение выборки электромагнитного затухающего отклика на импульс;
взаимную корреляцию выборки затухающего отклика с предварительно построенной базисной функцией, моделирующей эффекты от введения проводящих объектов в область обнаружения, для получения коррелированного выходного сигнала; и
анализ коррелированного выходного сигнала на пиковые значения для получения индикации присутствия или отсутствия электропроводящих объектов в пределах области обнаружения.
2. Способ по п. 1, в котором базисную функцию предварительно строят путем моделирования разностного сигнала между помещением электропроводящего объекта в область обнаружения и удалением электропроводящего объекта из области обнаружения.
3. Способ по п. 1, в котором базисную функцию предварительно строят путем моделирования эффектов от помещения электропроводящего объекта в область обнаружения.
4. Способ по п. 2, в котором упомянутое моделирование моделирует изменение индуктивности от помещения электропроводящего объекта в область обнаружения.
5. Способ по п. 1, в котором базисную функцию предварительно строят путем измерения эффектов от помещения электропроводящего объекта в область обнаружения.
6. Способ по п. 5, в котором измерение эффектов от помещения электропроводящего объекта в область обнаружения включает присутствие шума.
7. Способ по п. 1, в котором область обнаружения частично окружена электропроводящим материалом.
8. Способ по п. 1, в котором область обнаружения находится, по меньшей мере частично, внутри приемного контейнера, выполненного преимущественно из металла.
9. Способ по п. 1, в котором подача импульсов в проводящую рамку вокруг области обнаружения включает подачу электрических импульсов в частотном диапазоне между примерно 100 и 1000 Гц.
10. Способ по п. 9, в котором импульсы чередуются по полярности.
11. Способ по п. 8, в котором приемный контейнер представляет собой ковш экскаватора, имеющий зев для загрузки и/или выгрузки добываемой руды или грунта из ковша.
12. Способ по п. 11, в котором проводящая рамка окружает зев ковша экскаватора.
13. Способ обнаружения и удаления электропроводящих объектов, заключенных в добываемую руду и/или грунт в производственном потоке горнодобычи, при этом способ включает:
выемку порции груза руды и/или грунта с помощью ковша экскаватора;
во время выемки сканирование для обнаружения электропроводящих объектов, заключенных в порцию груза в соответствии со способом по п. 11; и
выборочное выведение порции груза из производственного потока, когда металлические объекты обнаруживают в порции груза.
14. Система для обнаружения с помощью импульсной индукции присутствия или отсутствия электропроводящих объектов в пределах области обнаружения, при этом упомянутая система содержит:
блок управления;
средство генерирования сигнала для подачи импульсов в проводящую рамку вокруг области обнаружения;
средство контроля для контроля электромагнитного затухающего отклика на импульс; и
блок обработки данных для взаимной корреляции выборки затухающего отклика с предварительно построенной базисной функцией, моделирующей эффекты от введения проводящих объектов в область обнаружения, для получения коррелированного выходного сигнала; и для анализа коррелированного выходного сигнала на пиковые значения для получения индикации присутствия или отсутствия электропроводящих объектов в пределах области обнаружения.
15. Система по п. 14, в которой базисную функцию предварительно строят путем моделирования разностного сигнала между помещением электропроводящего объекта в область обнаружения и удалением электропроводящего объекта из области обнаружения.
16. Система по п. 14, в которой базисную функцию предварительно строят путем моделирования эффектов от помещения электропроводящего объекта в область обнаружения.
17. Система по п. 15, в которой упомянутое моделирование моделирует изменение индуктивности от помещения электропроводящего объекта в область обнаружения.
18. Система по п. 14, в которой базисную функцию предварительно строят путем измерения эффектов от помещения электропроводящего объекта в область обнаружения.
19. Система по п. 18, в которой измерение эффектов от помещения электропроводящего объекта в область обнаружения включает присутствие шума.
20. Система по п. 14, в которой область обнаружения частично окружена электропроводящим материалом.
21. Система по п. 20, в которой область обнаружения находится, по меньшей мере частично, внутри приемного контейнера, выполненного преимущественно из металла.
22. Система по п. 21, в которой рамка расположена на краю или рядом с краем приемного контейнера, причем упомянутый край определяет зев приемного контейнера.
23. Система по п. 21, в которой приемный контейнер представляет собой ковш экскаватора, имеющий зев для загрузки и/или выгрузки добываемой руды или грунта из ковша.
24. Землеройный экскаватор, содержащий систему для обнаружения присутствия или отсутствия электропроводящих объектов по п. 23.
25. Землеройный экскаватор по п. 24, в котором ковш имеет днище и периферийную боковую стенку, простирающуюся до периферийного края, определяющего зев ковша, причем днище и периферийная боковая стенка окружают и определяют внутреннее грузонесущее отделение ковша.
26. Землеройный экскаватор по п. 25, в котором боковая стенка имеет внутреннюю поверхность, имеющую паз для приема упомянутой рамки.
27. Землеройный экскаватор по п. 26, в котором рамка удерживается внутри упомянутого паза с помощью неметаллического непроводящего держателя.
| КОНВЕЙЕРНЫЙ МЕТАЛЛОИСКАТЕЛЬ | 1999 |
|
RU2159946C2 |
| 0 |
|
SU154156A1 | |
| Электромагнитный металлоискатель | 1976 |
|
SU656012A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| JP 5232245 A, 07.09.1993 | |||
| US 6326790 B1, 04.12.2001 | |||
| US 20100321021 A1, 23.12.2010 | |||
| Устройство для обнаружения магнитных или немагнитных проводящих тел на конвейере | 1968 |
|
SU448656A3 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНОЙ МАШИНЫ | 1992 |
|
RU2106775C1 |
| WO 2011082728 A1, 14.07.2011. | |||

