Изобретение относится к области определения состояния несущих конструкций антенно-мачтовых сооружений (АМС), оперативного оповещения об изменении их состояния, предупреждения возникновения чрезвычайных ситуаций, и может быть использовано в автоматизированных системах мониторинга безопасности несущих конструкций в процессе эксплуатации зданий и сооружений.
В настоящее время контроль вертикальности АМС проводится средствами геодезического мониторинга (путем проведения геодезических угловых измерений) в установленном порядке проведения данных работ. [1] (Инструкция по эксплуатации антенных сооружений радиорелейных линий связи/ Министерство связи СССР // ГЛАВСВЯЗЬПРОЕКТ. Государственный Союзный Проектный Институт. Утверждена Министерством связи СССР 14 января 1980 г.), [2] (СТ-011-3 Приложение 4.
Очевидным недостатком указанного контроля является то, что при заданной периодичности - минимум два раза в год, контроль вертикальности АМС в межповерочный период не проводится.
Известен способ контроля линейных и угловых отклонений от вертикального направления для дистанционного мониторинга антенно-мачтовых сооружений, являющийся наиболее близким по технической сути. [3] (патент РФ на изобретение №2477454).
Способ включает обработку параметров прибора, фиксирующего линейные и угловые отклонения от вертикального положения АМС, в качестве которого используют трехосный акселерометр, закрепленный на АМС. Регистрируют проекции линейного ускорения на три ортогональные оси акселерометра по меньшей мере для двух последовательных сеансов измерения, а линейные и угловые отклонения от вертикального положения антенно-мачтовых сооружений вычисляют по результатам выделения и анализа поступательной составляющей динамических характеристик поступательно-колебательного движения АМС, вычисленных с учетом величин упомянутых проекций линейного ускорения.
Недостатками настоящего способа является отсутствие информации о причинах отклонений и колебаний АМС от вертикального положения, отсутствие данных об уровнях напряженно-деформированного состояния (НДС) металлических конструкций, отсутствие информации о пространственном положении фундамента АМС.
Целью предлагаемого способа контроля состояния антенно-мачтовых сооружений является создание комплексной системы, позволяющей, помимо получения в режиме реального времени данных об отклонениях и колебаний АМС, получать информацию об их причинах, о геометрии и направлении изгиба АМС, пространственном положении фундамента и уровнях НДС металлических конструкций.
Указанная цель достигается за счет применения:
- датчиков НДС, установленных в заданных сечениях на мачте;
- анемометра (измерение направления и скорости ветра);
- сейсмодатчика;
- блоков трехосных акселерометров, установленных через равные расстояния на мачте АМС и в его фундаменте;
- блока сбора, обработки и передачи данных в режиме on-line;
- программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров, анемометра, сейсмодатчиков и датчиков НДС о различных параметрах состояния АМС.
Сущность настоящего изобретения состоит в том, что известный способ контроля состояния антенно-мачтовых сооружений, заключающийся в установке на его мачте блока с трехосным акселерометром, согласно изобретению предусматривает дополнительную установку на ней, через равные расстояния, блоков с трехосными акселерометрами, установку анемометра, установку в ее заданных сечениях датчиков напряженно-деформированного состояния, а также предусматривает установку дополнительного блока с трехосным акселерометром в ее фундамент и сейсмодатчика в грунт, что позволит, после обработки полученной информации, в режиме on-line иметь информацию о реальных причинах возможных отклонений мачты от вертикальности, ее геометрии, о пространственном положении фундамента и уровнях напряжений конструктивных элементов мачты.
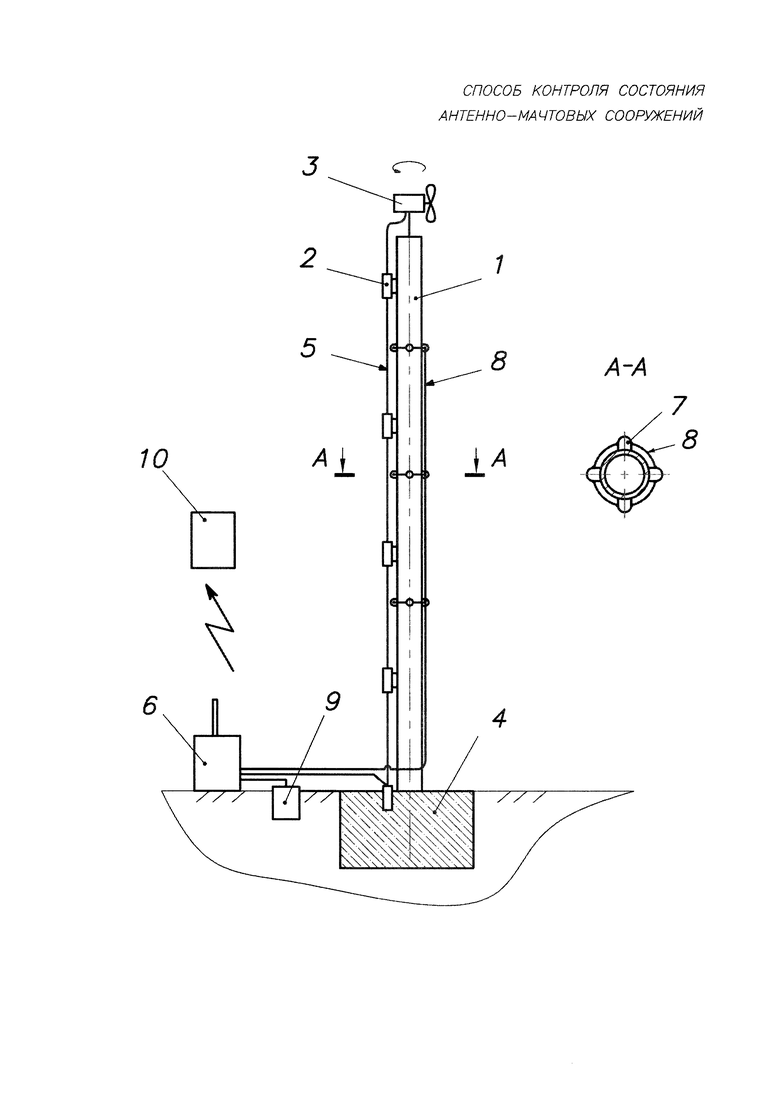
На фиг. 1 показана схема реализации способа контроля состояния антенно-мачтовых сооружений, где:
1 - мачта АМС;
2 - блок трехосевых акселерометров;
3 - анемометр;
4 - фундамент АМС;
5 - кабель;
6 - блок сбора, обработки и передачи данных;
7 - датчик НДС;
8 - кабель;
9 - сейсмодатчик;
10 - диспетчерский пункт.
Способ контроля осуществляется следующим образом.
На мачту АМС устанавливаются блоки трехосных акселерометров 2 (через равные расстояния), анемометр 3. В фундамент АМС 4 устанавливается один блок трехосных акселерометров 2. Вышеуказанные элементы соединены кабелем 5 и с его помощью подключены к блоку сбора, обработки и передачи данных 6, оборудованного вблизи АМС. По периметру заданных сечений мачты АМС 1 устанавливаются датчики НДС 7, которые соединены кабелем 8 друг с другом и с блоком сбора, обработки и передачи данных 6. В грунте, рядом с фундаментом АМС 4, устанавливается сейсмодатчик 9.
Под действием ветровой нагрузки или сейсмических колебаний грунта мачта АМС 1 отклоняется от вертикали. Блоки трехосевых акселерометров 2 дают информацию об ориентации в пространстве участков мачты АМС 1 в местах их установки. Минимальное количество блоков трехосевых акселерометров 2 не менее трех. Блок трехосевых акселерометров 2, установленный в фундаменте АМС 4, дает информацию о пространственном положении фундамента АМС 4.
Программное обеспечение блока сбора, обработки и передачи данных 6 преобразует в режиме реального времени информацию с блоков трехосевых акселерометров 2 об их положении в пространстве в реальную геометрию мачты АМС 1 и ее фундамента АМС 4 в формате 3-D, возникающую под воздействием ветровой нагрузки или сейсмических колебаний. Сравнивая показания анемометра 3 о направлении и скорости ветра с величиной и направлением изгиба мачты АМС 1, полученных с блоков трехосевых акселерометров 2, оператор диспетчерского пункта 10 может оценить ситуацию, является она штатной или аварийной. Таким же образом оператор оценивает колебания мачты с учетом информации от сейсмодатчика 9.
Для полноты контроля состояния АМС необходимо иметь информацию об уровнях НДС конструкций мачты АМС 1 при ее критических отклонениях от вертикали. Эту информацию обеспечивают установленные по периметру заданных сечений мачты АМС 1 датчики НДС 7.
Указанный способ может быть реализован и на беспроводной технологии.
Таким образом, реализуется универсальный, комплексный способ контроля состояния антенно-мачтовых сооружений, предназначенный для определения как отклонений от вертикальности, так и причин отклонений с информацией об уровнях НДС конструкций в режиме реального времени.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Инструкция по эксплуатации антенных сооружений радиорелейных линий связи/ Министерство связи СССР // ГЛАВСВЯЗЬПРОЕКТ. Государственный Союзный Проектный Институт. Утверждена Министерством связи СССР 14 января 1980 г.
2. СТ-011-3 Приложение 4. Требования к проведению геодезического контроля антенных опор / ОАО «Мобильные телесистемы».
3. Патент РФ на изобретение №2477454.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля антенно-мачтовых сооружений | 2019 |
|
RU2705934C1 |
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| ИНТЕРАКТИВНАЯ СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА НА УЧАСТКАХ НАДЗЕМНЫХ ПЕРЕХОДОВ | 2013 |
|
RU2556335C1 |
| КОМПЛЕКС МОНИТОРИНГА И РЕГУЛИРОВКИ НАПРЯЖЁННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ ВАНТОВЫХ НАДЗЕМНЫХ ПЕРЕХОДОВ | 2017 |
|
RU2667604C1 |
| КОМПЛЕКС МОНИТОРИНГА ЗА ИЗМЕРЕНИЕМ ГЕОМЕТРИИ И УРОВНЯМИ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2019 |
|
RU2727115C1 |
| ПРОТИВООПОЛЗНЕВОЕ ЗАЩИТНОЕ СООРУЖЕНИЕ | 2012 |
|
RU2524225C2 |
| СИСТЕМА ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА НА УЧАСТКАХ НАДЗЕМНЫХ ПЕРЕХОДОВ | 2013 |
|
RU2562602C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ПРОВЕДЕНИЯ ПОДВОДНЫХ РАБОТ | 2016 |
|
RU2651932C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2659176C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
Изобретение относится к области определения состояния несущих конструкций антенно-мачтовых сооружений (АМС). Способ контроля состояния антенно-мачтовых сооружений заключается в установке на его мачте блока с трехосным акселерометром, а также предусматривает дополнительную установку на ней, через равные расстояния, блоков с трехосными акселерометрами, установку анемометра, установку в ее заданных сечениях датчиков напряженно-деформированного состояния, а также предусматривает установку дополнительного блока с трехосным акселерометром в ее фундамент и сейсмодатчика в грунт, что позволит, после обработки полученной информации, в режиме on-line иметь информацию о реальных причинах возможных отклонений мачты от вертикальности, ее геометрии, о пространственном положении фундамента и уровнях напряжений конструктивных элементов мачты. Технический результат – получение информации об их причинах, о геометрии и направлении изгиба АМС, пространственном положении фундамента и уровнях напряженно-деформированного состояния (НДС) металлических конструкций. 1 ил.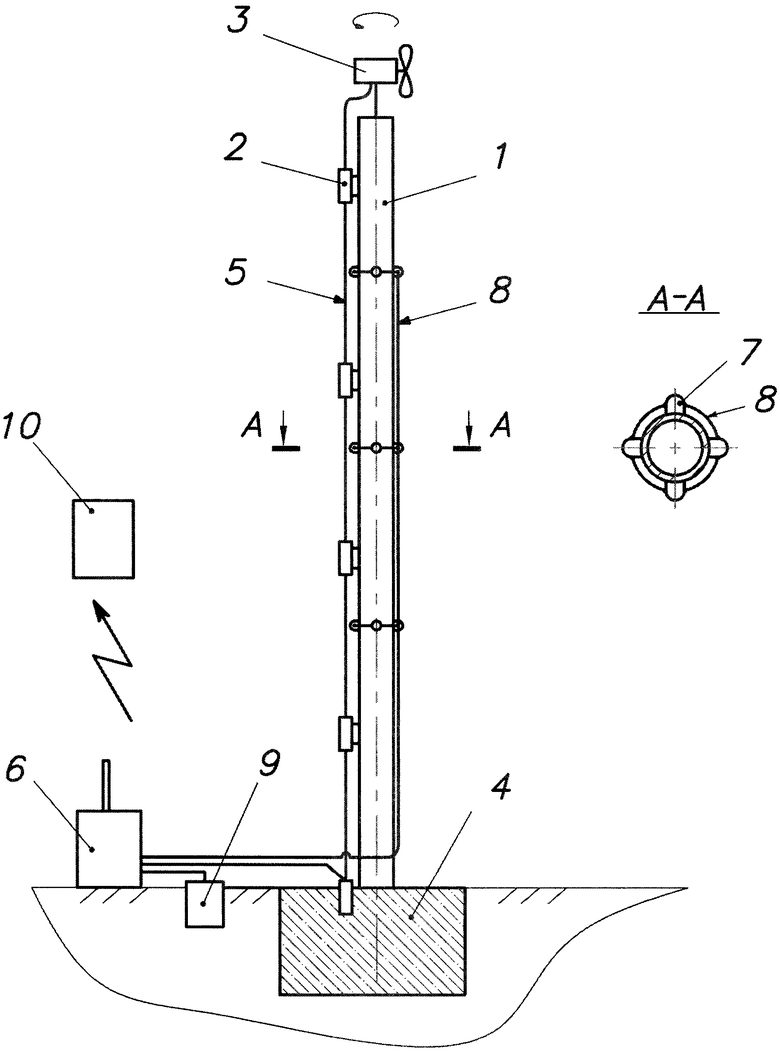
Способ контроля состояния антенно-мачтовых сооружений, заключающийся в установке на его мачте блока с трехосным акселерометром, отличающийся тем, что предусматривает дополнительную установку на ней, через равные расстояния, блоков с трехосными акселерометрами, установку анемометра, установку в ее заданных сечениях датчиков напряженно-деформированного состояния, а также предусматривает установку дополнительного блока с трехосным акселерометром в ее фундамент и сейсмодатчика в грунт, что позволит, после обработки полученной информации, в режиме on-line иметь информацию о реальных причинах возможных отклонений мачты от вертикальности, ее геометрии, о пространственном положении фундамента и уровнях напряжений конструктивных элементов мачты.
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| СПОСОБ КОНТРОЛЯ ЛОКАЛЬНЫХ ПОВРЕЖДЕНИЙ КОНСТРУКЦИЙ | 2009 |
|
RU2395800C1 |
| Нажимной валик со срободными втулками для вытяжных приборов ровничных и прядильных машин | 1952 |
|
SU98290A1 |
| НАСОС ДЛЯ ПЕРЕКАЧИВАНИЯ ГАЗОЖИДКОСТНОЙ СМЕСИ | 2019 |
|
RU2703774C1 |
| US 20120166136 A1, 28.06.2012. | |||

