Изобретение относится к способам позиционирования любого подводного оборудования, предназначенного для поиска и диагностики подводных объектов, а также для проведения монтажных работ.
Известен способ динамического позиционирования судов, контролирующий судно для удержания его позиции или курса посредством судовых движителей и подруливающих устройств [1] (https://ru.m.wikipedia.org).
Основные элементы известного способа:
- система энергоснабжения;
- система судовых движителей;
- система управления динамическим позиционированием.
Недостатком вышеуказанного способа являются высокие энергозатраты, обусловленные необходимостью позиционировать судно, обладающее большой массой и инерционностью.
Общеизвестным является способ спуска подводного оборудования на тросе с борта судна с помощью стрелового крана.
Недостатками данного способа являются нарушение поперечной устойчивости при большом весе спускаемого подводного оборудования (для маломерных судов) и закручивание оборудование вокруг оси троса.
Наиболее близким по технической сущности и достигаемому результату является способ позиционирования подводного оборудования относительно судна-носителя, который предполагает использование экранированного кабеля-троса, на котором через равные расстояния установлены экранированные блоки акселерометров, и наличие программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве, преобразующего ее в реальную траекторию кабеля-троса в формате 3-D и определяющего реальное положение подводного оборудования относительно судна-носителя [2] (Патент РФ №2566564).
Недостатком известного способа является малая грузоподъемность позиционируемого технологического оборудования, так как оно размещается на телеуправляемом подводном аппарате.
Задачей настоящего изобретения является создание способа позиционирования подводного оборудования в трехкоординатной системе (X, У, Z) относительно обследуемого объекта, реализуемого на маломерном судне-носителе, без нарушения его поперечной устойчивости. Предлагаемый способ позволит использовать любой необходимый набор оборудования, который может быть смонтирован на стабилизированном подвесе.
Указанная задача достигается за счет применения:
- симметричной грузоподъемной конструкции, состоящей из опорной мачты и двух горизонтальных балок, на каждой из которых установлена лебедка с экранированным кабелем-тросом;
- экранированных кабелей-тросов, на которых через равные расстояния установлены экранированные блоки акселерометров;
- программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве и производящего ее перерасчет для формирования заданной траектории движения подводного оборудования, смонтированного на подвесе, за счет управления работой лебедок и поворотом горизонтальных балок.
Сущность настоящего изобретения состоит в том, что заявляемый способ позиционирования подводного оборудования, включающий в себя судно-носитель, экранированные кабели-тросы, на которых через равные расстояния установлены экранированные блоки акселерометров, согласно изобретению предлагает дооборудование судна-носителя опорной мачтой; симметричной грузоподъемной конструкцией, состоящей из двух горизонтальных балок, на каждой из которых установлена лебедка с экранированным кабелем-тросом; программным обеспечением, обрабатывающим в режиме реального времени информацию с датчика глубины, с блоков акселерометров об их положении в пространстве и производящим расчет треугольника в вертикальной плоскости, образованного горизонтальными балками и двумя кабелями-тросами, а также расчет треугольника в горизонтальной плоскости, образованного между горизонтальными балками при их вращении вокруг вертикальной оси опорной мачты, что позволяет оператору задавать траекторию движения подводного оборудования, смонтированного на подвесе, за счет программного управления работой лебедок и поворотом горизонтальных балок.
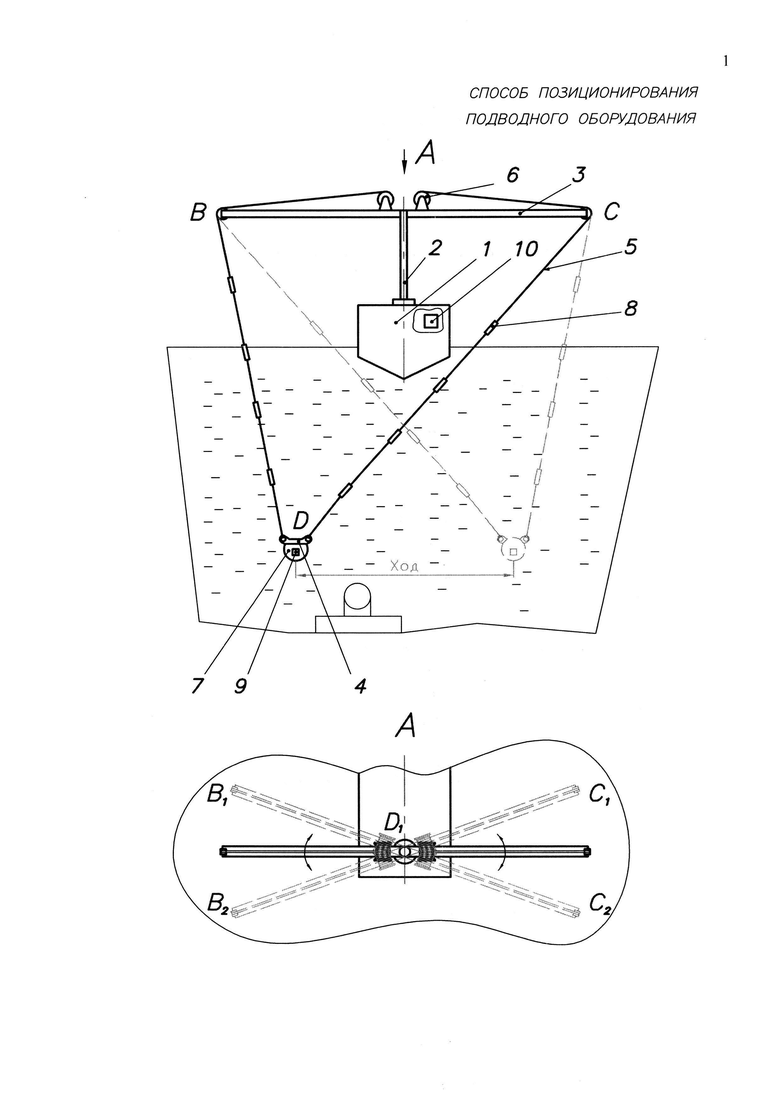
На чертеже представлен способ позиционирования подводного оборудования, где:
1 - судно-носитель;
2 - опорная мачта;
3 - горизонтальная балка;
4 - подвес;
5 - кабель-трос;
6 - лебедка;
7 - подводное оборудование;
8 - блок акселерометров;
9 - датчик глубины;
10 - пункт обработки информации.
Способ реализуется следующим образом.
С корабля-носителя 1, на котором устанавливается опорная мачта 2, с симметричной грузоподъемной конструкцией, состоящей из двух горизонтальных балок 3, на подвесе 4, закрепленном на экранированных кабель-тросах 5, с помощью лебедок 6 спускается подводное оборудование 7. Блоки акселерометров 8, равномерно установленные на кабель-тросах 5 и датчик глубины 9 дают информацию о положении в пространстве подвеса 4 с подводным оборудованием 7.
Программное обеспечение пункта обработки информации 10, обработав в режиме реального времени информацию с блоков акселерометров 8 и датчика глубины 9, производит расчет треугольника B, C, D в вертикальной плоскости, образованного горизонтальными балками 3 и двумя кабель-тросами 5, а также расчет треугольника B1, C1, D1 (либо B2, C2, D1) в горизонтальной плоскости, образованного между горизонтальными балками 3 при их вращении вокруг вертикальной оси опорной мачты 2, что обеспечивает возможность управления перемещением подводного оборудования 7 по заданной оператором траектории в трехмерной системе координат. Перемещение осуществляется за счет программного управления работой лебедок 6 и поворотом горизонтальных балок 3.
Минимальное количество блоков акселерометров 4 на каждом кабеле-тросе 5 не менее трех.
Экранированный кабель-трос 5 и блоки акселерометров 4, выполненные в экранированных корпусах, обеспечивают помехозащищенность системы.
Предлагаемый способ позволяет:
- реализовать его на маломерном судне-носителе без нарушения его поперечной остойчивости;
- позиционировать подводное оборудование относительно обследуемого объекта;
- перемещать подводное оборудование по заданной траектории относительно обследуемого объекта;
- высокую грузоподъемность, позволяющую выполнять не только диагностические, но и монтажные работы совместно с водолазами.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. https://ru.m.wikipedia.org
2. Патент РФ №2566564.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ПРОВЕДЕНИЯ ПОДВОДНЫХ РАБОТ | 2016 |
|
RU2651932C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО ОБСЛЕДУЕМОГО ПОДВОДНОГО ТРУБОПРОВОДА | 2017 |
|
RU2692829C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ НА СУДНЕ-ЛИХТЕРОВОЗЕ КРУПНОГАБАРИТНЫХ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 2001 |
|
RU2207288C2 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2018 |
|
RU2713998C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| Способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления | 2019 |
|
RU2715108C1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
Изобретение относится к способам позиционирования любого подводного оборудования, предназначенного для поиска и диагностики подводных объектов, а также для проведения монтажных работ. Предложен способ позиционирования подводного оборудования, включающий в себя судно-носитель, экранированные кабель-тросы, на которых через равные расстояния установлены экранированные блоки акселерометров. Судно-носитель дооборудовано опорной мачтой, симметричной грузоподъемной конструкцией, которая состоит из двух горизонтальных балок, на каждой из которых установлена лебедка с экранированным кабель-тросом, программным обеспечением, обрабатывающим в режиме реального времени информацию с датчика глубины, с блоков акселерометров об их положении в пространстве и производящим расчет треугольника в вертикальной плоскости, образованного горизонтальными балками и двумя кабель-тросами, а также расчет треугольника в горизонтальной плоскости, образованного между горизонтальными балками при их вращении вокруг вертикальной оси опорной мачты. Это позволяет оператору задавать траекторию движения подводного оборудования, смонтированного на подвесе, за счет программного управления работой лебедок и поворотом горизонтальных балок. Технический результат заключается в повышении надежности проведения операции позиционирования подводного оборудования, расширении ее возможностей (по грузоподъемности, по видам производимых работ). 1 ил.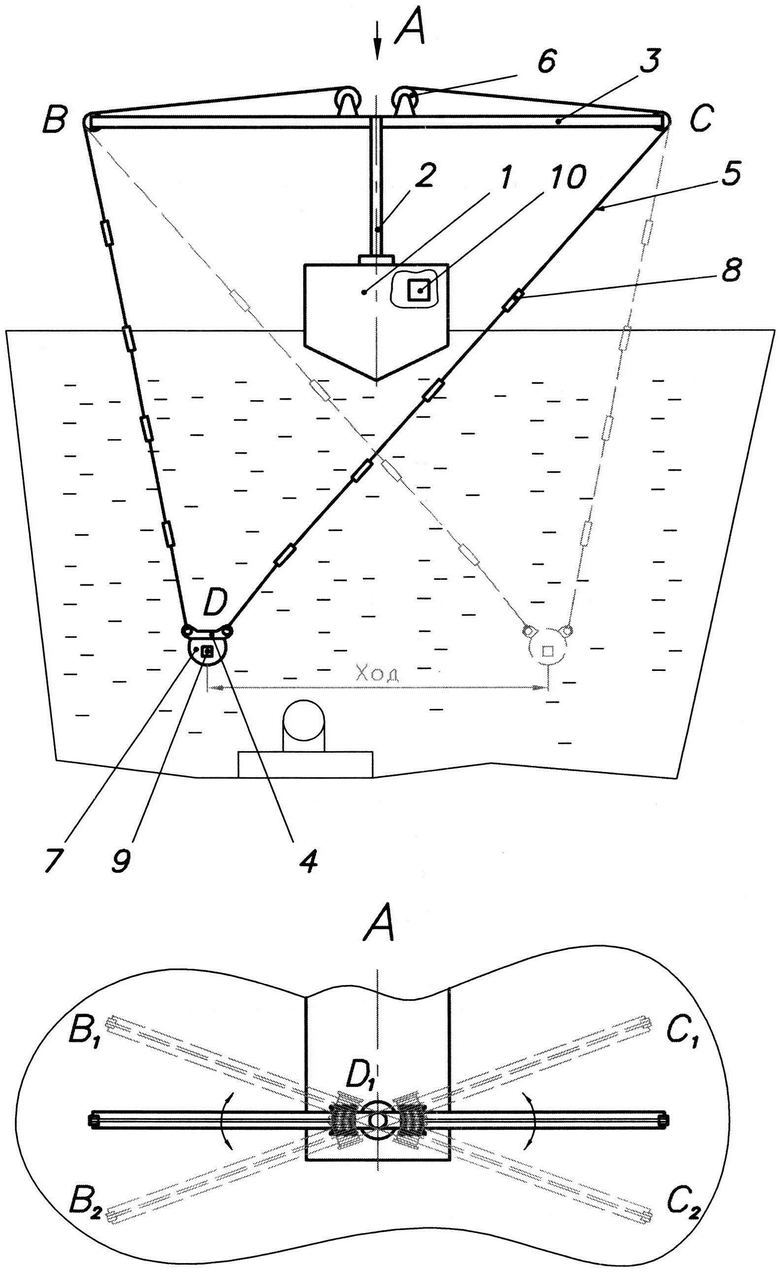
Способ позиционирования подводного оборудования, включающий в себя судно-носитель, экранированные кабель-тросы, на которых через равные расстояния установлены экранированные блоки акселерометров, отличающийся тем, что предлагает дооборудование судна-носителя опорной мачтой, симметричной грузоподъемной конструкцией, состоящей из двух горизонтальных балок, на каждой из которых установлена лебедка с экранированным кабель-тросом, программным обеспечением, обрабатывающим в режиме реального времени информацию с датчика глубины, с блоков акселерометров об их положении в пространстве и производящим расчет треугольника в вертикальной плоскости, образованного горизонтальными балками и двумя кабель-тросами, а также расчет треугольника в горизонтальной плоскости, образованного между горизонтальными балками при их вращении вокруг вертикальной оси опорной мачты, что позволяет оператору задавать траекторию движения подводного оборудования, смонтированного на подвесе, за счет программного управления работой лебедок и поворотом горизонтальных балок.
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| KR 100852786 B1, 19.08.2008 | |||
| US 2002064092 A1, 30.05.2002 | |||
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2098691C1 |

