Изобретение относится к системам позиционирования подводных аппаратов и может быть использовано для позиционирования любого подводного оборудования, предназначенного для поиска и диагностики подводных объектов.
Известны гидроакустические системы позиционирования (ГСП) подводных аппаратов, предназначенные для определения точных координат подводных объектов, параметров и траектории их движения относительно судна-носителя в реальном масштабе времени [1] (http://www.teus-pro.ru/catalog/329/1002/).
Принцип работы гидроакустической системы позиционирования заключается в определении положения маяка-ответчика, установленного на подводном объекте, относительно судна-носителя. Для этого судно оборудуется одной или несколькими гидроакустическими антеннами (ГА), передающими и принимающими сигналы от маяков-ответчиков. По параметрам этих сигналов надводный блок обработки, построенный на базе персонального компьютера, определяет пеленг и дистанцию до маяка-ответчика. В дальнейшем специальное программное обеспечение отображает параметры и траекторию движения подводного объекта на мониторе оператора. При подключении к системе глобального позиционирования GPS или ГЛОНАСС возможно отображение всех данных в абсолютных географических координатах.
Недостатками настоящей системы является необходимость оснащения каждого спускаемого объекта маяком-ответчиком и соответствующим адаптером для его крепления, а также влияние на точность показаний возможных электромагнитных помех.
Целью предлагаемого способа позиционирования подводного оборудования относительно судна-носителя является создание универсальной, помехозащищенной системы позиционирования подводного оборудования относительно судна-носителя.
Указанная цель достигается за счет применения:
- экранированного кабеля-троса, на котором через равные расстояния установлены экранированные блоки акселерометров;
- программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве, преобразующего ее траекторию кабеля-троса и определяющего положение подводного оборудования относительно судна-носителя.
Сущность настоящего изобретения состоит в том, что заявляемый способ позиционирования подводного оборудования относительно судна-носителя, включающий в себя наличие кабеля-троса, согласно изобретению предполагает использование экранированного кабеля-троса, на котором через равные расстояния установлены экранированные блоки акселерометров, и наличие программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве, преобразующего ее в реальную траекторию кабеля-троса в формате 3-D и определяющего реальное положение подводного оборудования относительно судна-носителя.
На чертеже показана схема реализации способа позиционирования подводного оборудования относительно судна-носителя, где:
1 - судно-носитель;
2 - кабель-трос;
3 - подводное оборудование;
4 - блок акселерометров;
5 - пункт обработки информации.
Способ осуществляется следующим образом.
С корабля-носителя 1 на кабеле-тросе 2 к месту подводного обследования спускается подводное оборудование 3. Под действием подводных течений и из-за наличия парусности кабеля-троса 2 он отклоняется от вертикали. Блоки акселерометров 4 дают информацию об ориентации в пространстве участков кабеля-троса 2 в местах их установки. Минимальное количество блоков акселерометров 4 не менее трех.
Программное обеспечение пункта обработки информации 5 преобразует в режиме реального времени информацию с блоков акселерометров об их положении в пространстве в реальную траекторию кабеля-троса в формате 3-D и определяет реальное положение подводного оборудования относительно судна-носителя.
Экранированный кабель-трос 2, на котором через равные расстояния установлены экранированные блоки акселерометров 4, обеспечивают помехозащищенность системы.
Таким образом, реализуется универсальная, помехозащищенная система позиционирования подводного оборудования относительно судна-носителя, предназначенная для поиска и диагностики подводных объектов.
Источник информации
1. http://www.tetis-pro.ru/catalog/329/1002/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2659176C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО ОБСЛЕДУЕМОГО ПОДВОДНОГО ТРУБОПРОВОДА | 2017 |
|
RU2692829C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ПРОВЕДЕНИЯ ПОДВОДНЫХ РАБОТ | 2016 |
|
RU2651932C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Изобретение относится к системам позиционирования подводных аппаратов. Для позиционирования подводного оборудования относительно судна-носителя включают в себя наличие кабеля-троса, используют экранированный кабель-трос и программное обеспечение. На экранированном кабеле-тросе через равные расстояния установлены экранированные блоки акселерометров. Программное обеспечение обрабатывает информацию в режиме реального времени с блоков акселерометров об их положении в пространстве, которое преобразует ее в реальную траекторию кабеля-троса в формате 3-D. Траектория кабеля-троса определяет реальное положение подводного оборудования относительно судна-носителя. Достигается помехозащищенность системы позиционирования подводного оборудования. 1 ил.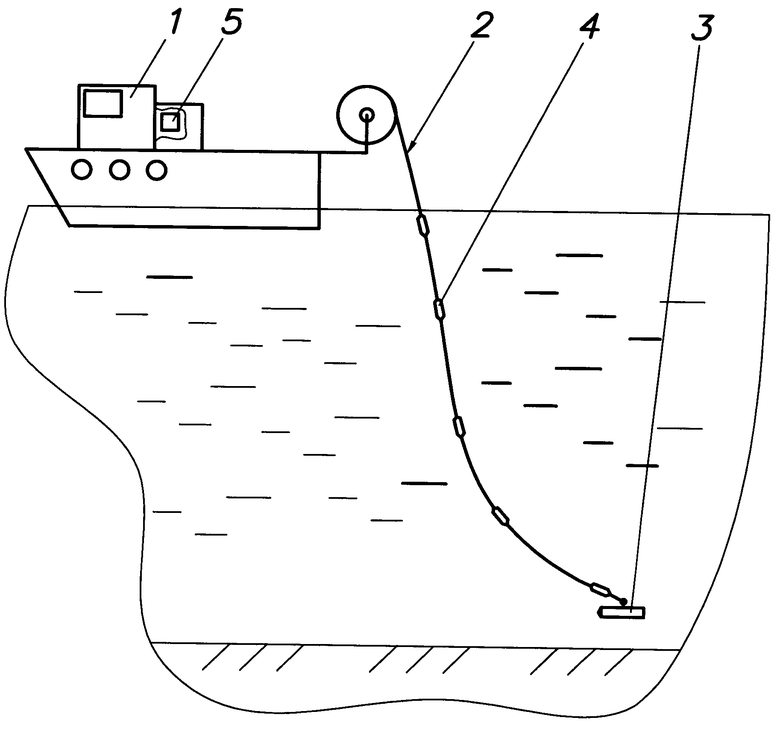
Способ позиционирования подводного оборудования относительно судна-носителя, включающий в себя наличие кабеля-троса, отличающийся тем, что дополнительно предлагает использование экранированного кабеля-троса, на котором через равные расстояния установлены экранированные блоки акселерометров, и использование программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве, преобразующего ее в реальную траекторию кабеля-троса в формате 3-D и определяющего реальное положение подводного оборудования относительно судна-носителя.
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| US 2014186123 A1, 03.07.2014 | |||

