Изобретение относится к способам позиционирования любого подводного оборудования, предназначенного для поиска и диагностики подводных объектов, а также для проведения монтажных работ.
Известен способ позиционирования подводного оборудования относительно судна-носителя [1] (патент РФ №2566564). Он предполагает использование экранированного кабеля-троса, на котором через равные расстояния установлены экранированные блоки акселерометров и наличие программного обеспечения, обрабатывающего в режиме реального времени информацию с блоков акселерометров об их положении в пространстве, преобразующего ее в реальную траекторию кабеля-троса в формате 3D и определяющего реальное положение подводного оборудования относительно судна-носителя.
Недостатком известного способа является малая грузоподъемность позиционируемого технологического оборудования, так как оно размещается на телеуправляемом подводном аппарате.
Наиболее близким по технической сути и полученному результату является способ динамического позиционирования судов, контролирующий судно для удержания его позиции или курса посредством судовых движителей и подруливающих устройств [2] (https://ru.m.wikipedia.org).
Основные элементы известного способа:
- система энергоснабжения;
- система судовых движителей;
- система управления динамическим позиционированием.
Недостатком вышеуказанного способа является высокие энергозатраты, обусловленные необходимостью позиционировать судно, обладающее большой массой и инерционностью. К тому же, для проведения некоторых видов работ необходимо дополнительно иметь систему стабилизации, исключающую влияние качки на проведение работ.
Целью предлагаемого изобретения является создание способа динамического позиционирования для проведения подводных работ, реализуемого на судне-носителе, изначально не оборудованном подобной системой. Предлагаемый способ позволит использовать любой необходимый набор оборудования, который может быть смонтирован на стабилизированном, в 3-координатной системе (X, Y, Z), жестком подвесе.
Указанная цель достигается за счет применения:
- стабилизированной поворотной стойки с телескопической горизонтальной мачтой, на которой закреплен многозвенный рычажный подъемник, обеспечивающий спуск-подъем подвеса с технологическим оборудованием;
- приводов выше указанных элементов систем стабилизации и позиционирования, обеспечивающих заданные перемещения;
- программного обеспечения, управляющего системой приводов и обеспечивающего постоянное расстояние подвеса относительно конкретной точки обследуемого объекта, за счет постоянной обработки информации, поступающей с глобальной спутниковой навигационной системы ГЛОНАСС, датчика глубины на подвесе и блока акселерометров системы стабилизации поворотной стойки.
Сущность настоящего изобретения состоит в том, что заявленный способ динамического позиционирования для проведения подводных работ, включающий в себя судно-носитель, согласно изобретению, предлагает его дооборудование стабилизированной по вертикали поворотной стойкой с телескопической горизонтальной мачтой, на которой закреплен многозвенный рычажный подъемник, обеспечивающий спуск-подъем подвеса с технологическим оборудованием, при этом приводы вышеуказанных элементов систем стабилизации и позиционирования программно связаны с системой ГЛОНАСС, блоком акселерометров на поворотной стойке и датчиком глубины на подвесе, предназначенном для крепления технологического оборудования, позиционирование которого относительно заданной точки и обеспечит реализацию предлагаемого способа.
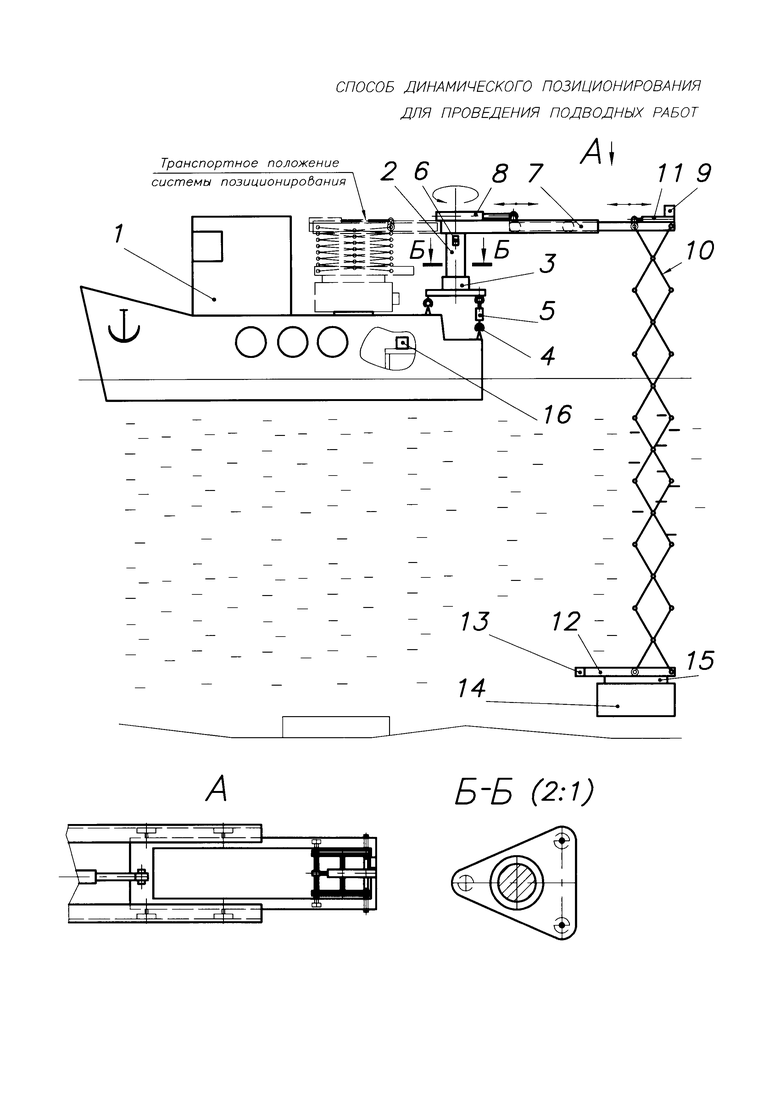
На чертеже представлен способ динамического позиционирования для проведения подводных работ, где:
1 - судно-носитель;
2 - поворотная стойка;
3 - привод;
4 - шаровая опора;
5 - привод;
6 - блок акселерометров;
7 - телескопическая горизонтальная мачта;
8 - привод;
9 - блок ГЛОНАСС;
10 - многозвенный рычажный подъемник;
11 - привод;
12 - подвес;
13 - датчик глубины;
14 - технологическое оборудование;
15 - поворотный стол;
16 - система управления.
Способ реализуется следующим образом.
На корабле-носителе 1 устанавливается стабилизированная поворотная стойка 2 с приводом 3, обеспечивающим ее вращение вокруг вертикальной оси, которая своим основанием опирается на три шаровые опоры 4, две из которых оснащены приводами 5, шарнирно закрепленными на корпусе судна. Данная трехопорная схема позволяет, по сигналу с блока акселерометров 6, во время качки, стабилизировать в вертикальном положении поворотную стойку 2, на которой установлена телескопическая горизонтальная мачта 7, выдвижение которой обеспечивает привод 8. На выдвижной части телескопической горизонтальной мачты 7 установлен блок ГЛОНАСС 9, его положение соответствует размещению многозвенного рычажного подъемника 10, раздвижение которого обеспечивает привод 11. На нижней части многозвенного рычажного подъемника 10 закреплен подвес 12 с установленным на нем датчиком глубины 13. Подвес 12 служит для монтажа на нем технологического оборудования 14, необходимого для проведения визуального осмотра, диагностического обследования или для выполнения монтажных работ. Подвес 12 целесообразно оснастить поворотным столом 15 с приводом, обеспечивающим ее поворот на заданную величину.
Программное обеспечение системы управления 16, постоянно обрабатывая поступающую информацию с глобальной спутниковой навигационной системы ГЛОНАСС, датчика глубины на подвесе и блока акселерометров системы стабилизации поворотной стойки, реализует синхронную работу приводов 3, 5, 6, 11, обеспечивая тем самым динамическое позиционирование технологического оборудования относительно точки обследования. Система управления 16 может быть выполнена как по проводной, так и по беспроводной технологиям.
Данный способ реализуем на глубинах до 50 м, так как в этом случае обеспечивается жесткость кинематической схемы, состоящей из поворотной стойки 2, телескопической горизонтальной мачты 7 и многозвенного рычажного подъемника 10, который представляет собой пространственную жесткую конструкцию. Судно-носитель при этом должно стоять на якоре.
Предлагаемый способ имеет следующие преимущества:
- высокая грузоподъемность, позволяющая выполнять не только диагностические, но и монтажные работы совместно с водолазами;
- возможность проведения осмотровых работ в движении на малых скоростях и малых глубинах.
Источники информации
1. Патент РФ №2566564.
2. https://ru.m.wikipedia.org
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2659176C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО ОБСЛЕДУЕМОГО ПОДВОДНОГО ТРУБОПРОВОДА | 2017 |
|
RU2692829C2 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ В ЛЕДОВЫХ УСЛОВИЯХ | 2013 |
|
RU2544045C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ СУДНА | 2018 |
|
RU2680944C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
Изобретение относится к области судостроения и касается выполнения подводных работ с использованием подводного оборудования, предназначенного для поиска и диагностики подводных объектов, а также для проведения монтажных работ. Предложен способ динамического позиционирования для проведения подводных работ, использующий судно-носитель, которое дооборудовано стабилизированной по вертикали поворотной стойкой с телескопической горизонтальной мачтой, на которой закреплен многозвенный рычажный подъемник, обеспечивающий спуск-подъем подвеса с технологическим оборудованием, при этом приводы вышеуказанных элементов систем стабилизации и позиционирования программно связаны с системой ГЛОНАСС, блоком акселерометров на поворотной стойке и датчиком глубины на подвесе, предназначенном для крепления технологического оборудования. Технический результат заключается в повышении точности позиционирования подводного оборудования на малых скоростях и малых глубинах при высокой грузоподъемности. 1 ил.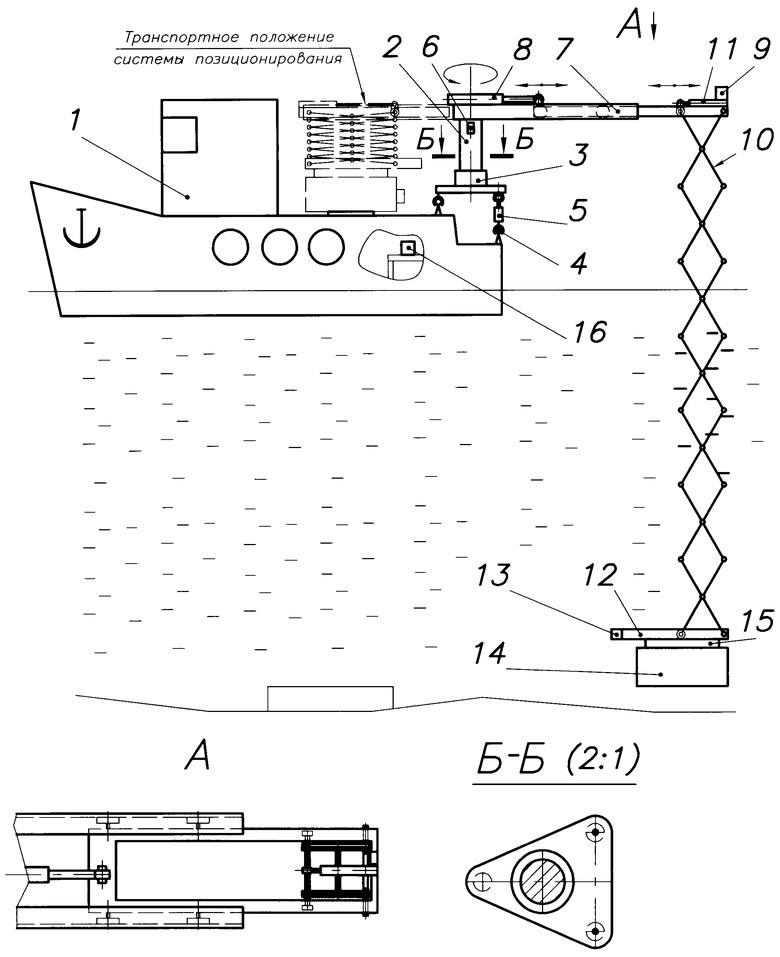
Способ динамического позиционирования для проведения подводных работ, включающий в себя судно-носитель, отличающийся тем, что предлагает его дооборудование стабилизированной по вертикали поворотной стойкой с телескопической горизонтальной мачтой, на которой закреплен многозвенный рычажный подъемник, обеспечивающий спуск-подъем подвеса с технологическим оборудованием, при этом приводы вышеуказанных элементов систем стабилизации и позиционирования программно связаны с системой ГЛОНАСС, блоком акселерометров на поворотной стойке и датчиком глубины на подвесе, предназначенном для крепления технологического оборудования.
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
| CA 1120790 A, 30.03.1982 | |||
| СУДОВОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2063360C1 |
| Узел крепления захвата к грузовой подвеске устройства для спуска и подъема плавающих грузов | 1982 |
|
SU1127801A1 |
| US 4597352 A, 01.07.1986 | |||
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |

