Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу оценки позиции и угла пространственной ориентации транспортного средства для оценки позиции и угла пространственной ориентации транспортного средства посредством использования фильтра частиц.
Уровень техники
[0002] Патентный документ 1 до этого раскрывает технологию для того, чтобы вычислять позицию и угол пространственной ориентации движущегося тела посредством использования фильтра частиц. В этой технологии, множество частиц рассеивается около позиции и угла пространственной ориентации движущегося тела, вычисленных посредством одометрии. После этого, из этих частиц, частица с наибольшим совпадением со значениями, измеряемыми посредством лазерного датчика, смонтированного на движущемся теле, вычисляется как истинные значения позиции и угла пространственной ориентации этого движущегося тела.
[0003] При этом то, насколько корректируются позиция и угол пространственной ориентации, вычисленные с использованием фильтра частиц, вычисляется последовательно, и текущий диапазон распределения, в котором можно рассеивать частицы, задается в соответствии с предысторией этих величин коррекции.
Список библиографических ссылок
Патентные документы
[0004] Патентный документ 1. Публикация заявки на патент (Япония) номер 2010-224755
Сущность изобретения
Техническая задача
[0005] Здесь, вышеописанная традиционная технология учитывает ошибку в направлении перемещения транспортного средства, но не учитывает в достаточной степени ошибку в направлении ширины транспортного средства. В частности, когда транспортное средство поворачивает на высокой скорости транспортного средства, большое движение формируется для транспортного средства в направлении ширины транспортного средства, в силу этого вызывая большую ошибку в направлении ширины транспортного средства. Тем не менее эта ситуация недостаточно изучается в современном уровне техники. Это приводит к такой проблеме, что текущий диапазон распределения частиц задается с задержкой и в силу этого не может задаваться надлежащим образом.
[0006] Таким образом, настоящее изобретение осуществлено с учетом обстоятельств, упомянутых выше, и его цель заключается в том, чтобы предоставлять устройство и способ оценки позиции и угла пространственной ориентации транспортного средства, которые допускают надлежащее задание текущего диапазона распределения частиц, даже когда скорость транспортного средства становится высокой, и движение формируется для транспортного средства в направлении ширины транспортного средства.
Решение задачи
[0007] Чтобы разрешать проблему, упомянутую выше, устройство и способ оценки позиции и угла пространственной ориентации транспортного средства согласно одному аспекту настоящего изобретения заключают в себе: задание текущего диапазона распределения частиц как предварительно определенного диапазона посредством использования фильтра частиц; рассеивание частиц в заданном текущем диапазоне распределения, чтобы оценивать позицию и угол пространственной ориентации транспортного средства из изображения, захватывающего окрестности транспортного средства; и расширение заданного текущего диапазона распределения в направлении ширины транспортного средства, когда скорость транспортного средства становится высокой.
Краткое описание чертежей
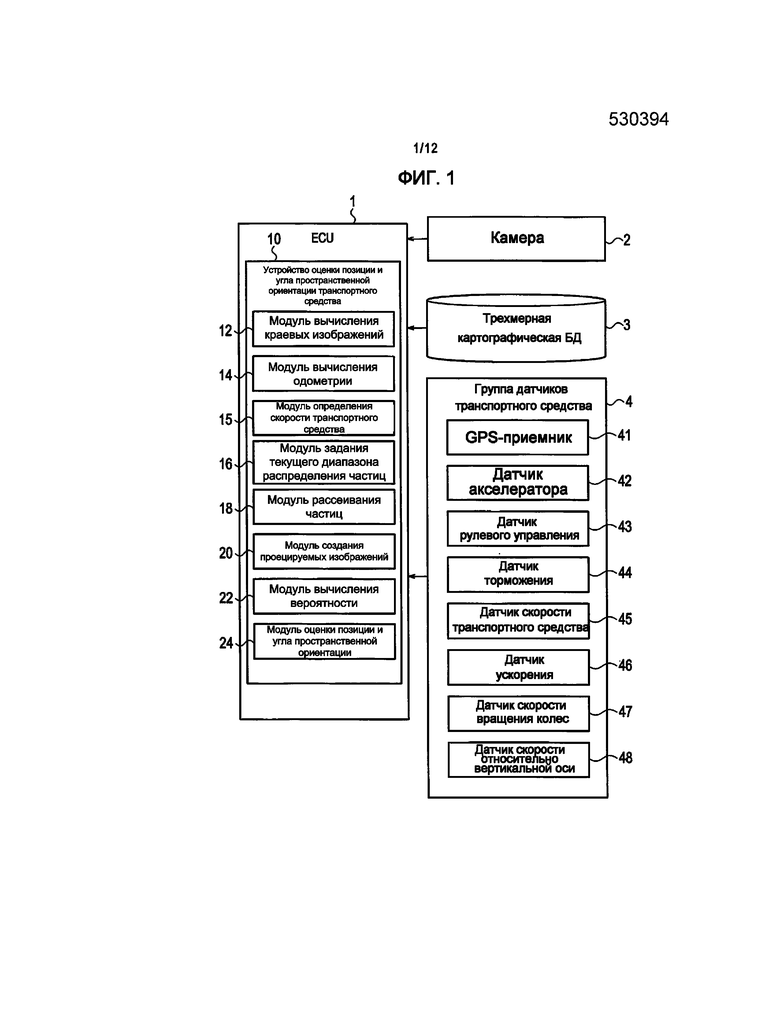
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно первому варианту осуществления настоящего изобретения.
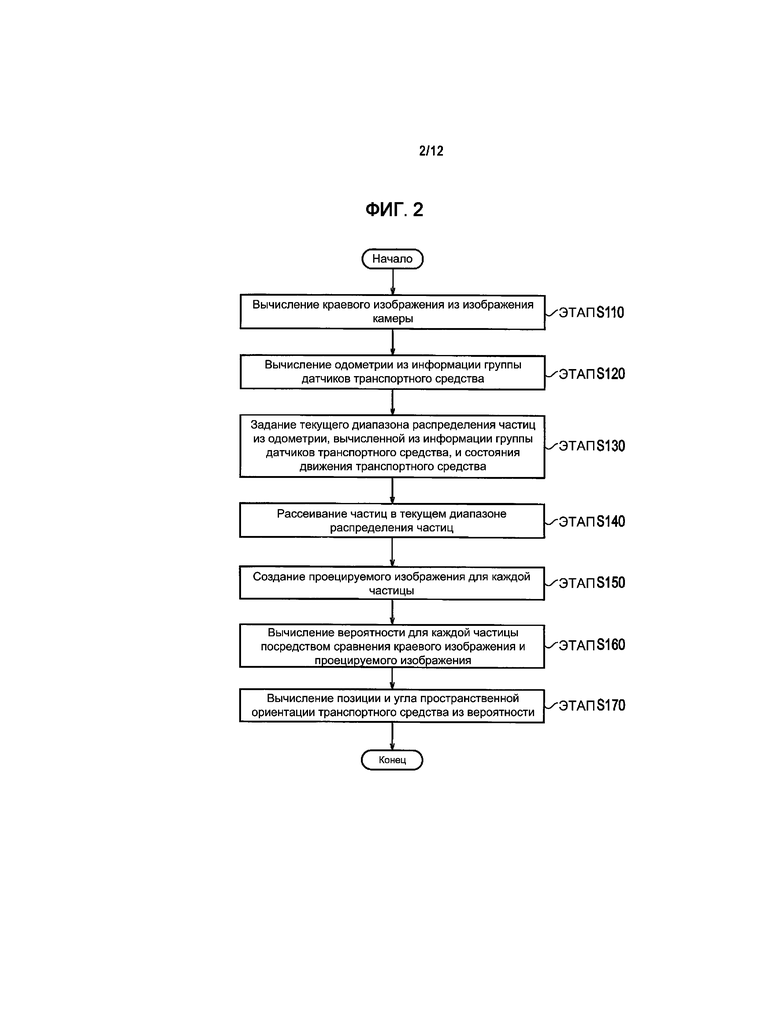
Фиг. 2 является блок-схемой последовательности операций способа, показывающей процедуру процесса оценки позиции и угла пространственной ориентации транспортного средства посредством устройства оценки позиции и угла пространственной ориентации транспортного средства согласно первому варианту осуществления настоящего изобретения.
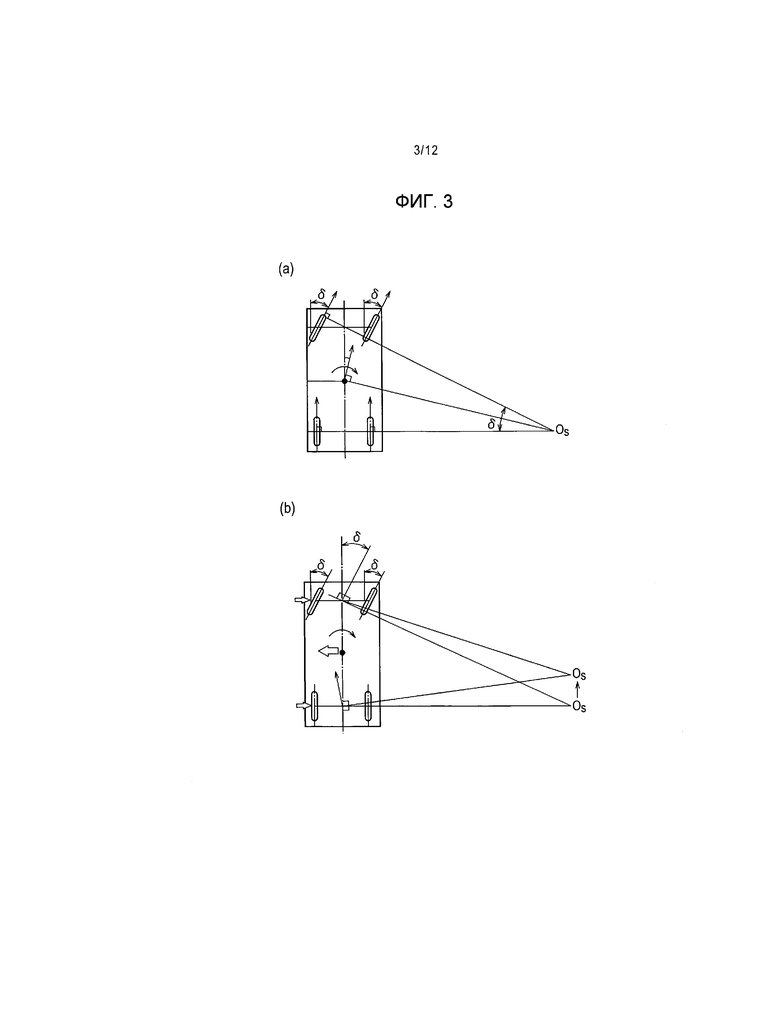
Фиг. 3 является набором схем, схематично иллюстрирующих центр поворота транспортного средства при повороте на установившейся скорости и угол бокового скольжения шин при этом.
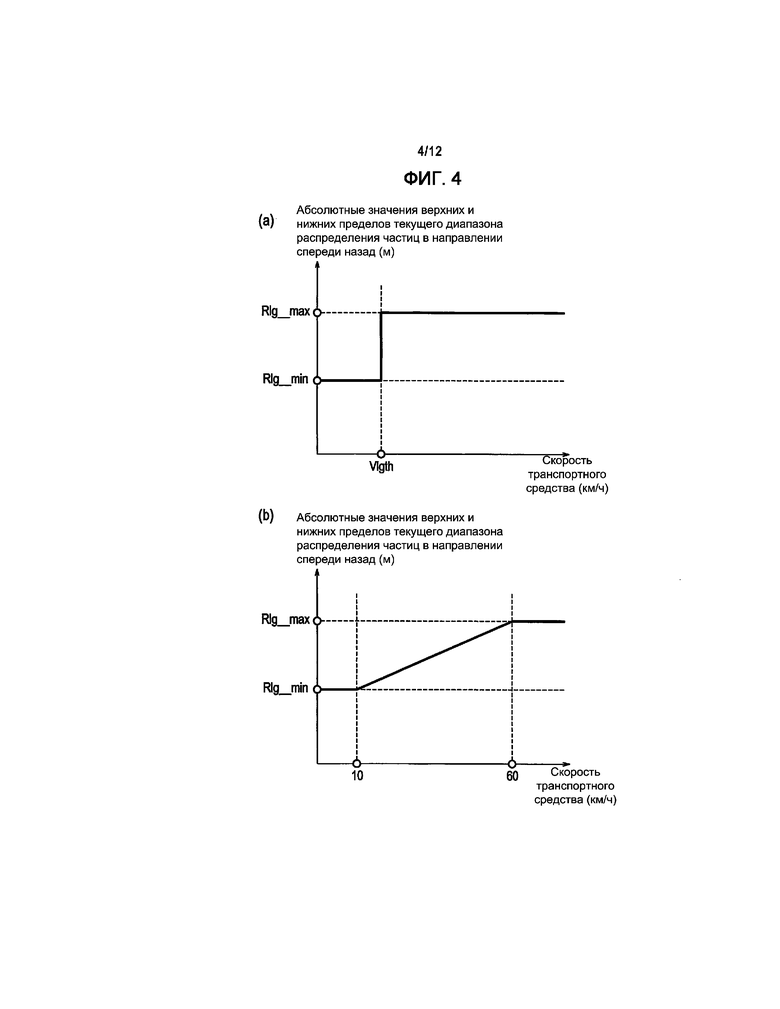
Фиг. 4 является набором графиков для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно первому варианту осуществления настоящего изобретения расширяет текущий диапазон распределения частиц в направлении вперед-назад транспортного средства в соответствии со скоростью.
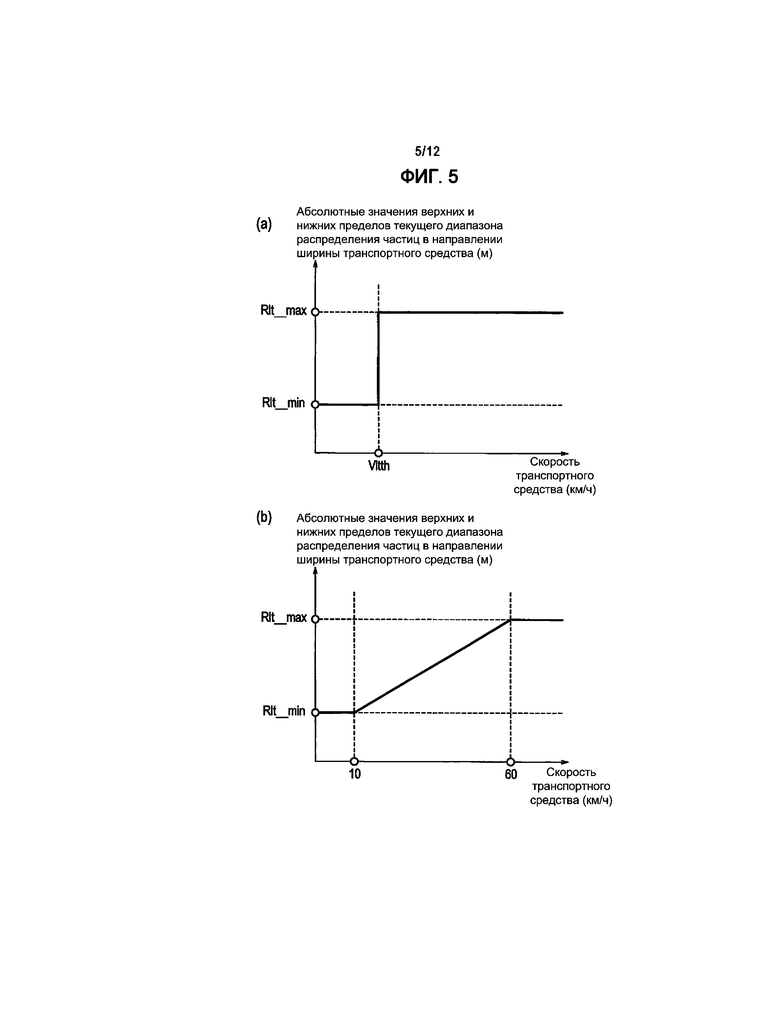
Фиг. 5 является набором графиков для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно первому варианту осуществления настоящего изобретения расширяет текущий диапазон распределения частиц в направлении ширины транспортного средства в соответствии со скоростью транспортного средства.
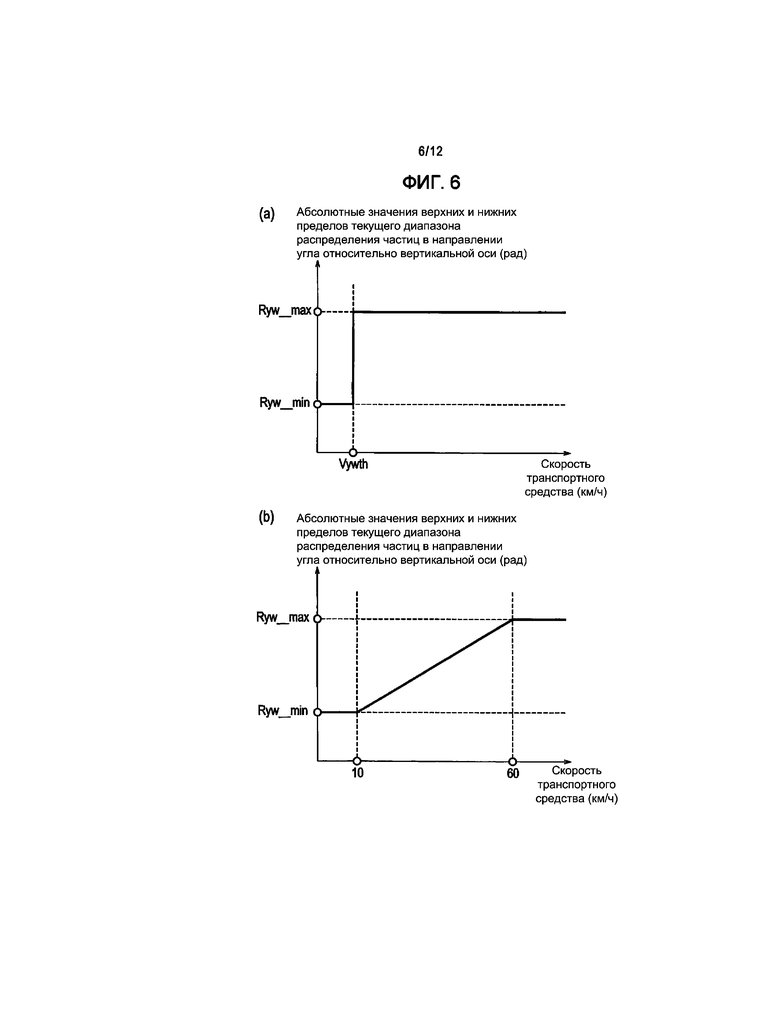
Фиг. 6 является набором графиков для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно первому варианту осуществления настоящего изобретения расширяет текущий диапазон распределения частиц в направлении угла рыскания транспортного средства в соответствии со скоростью.
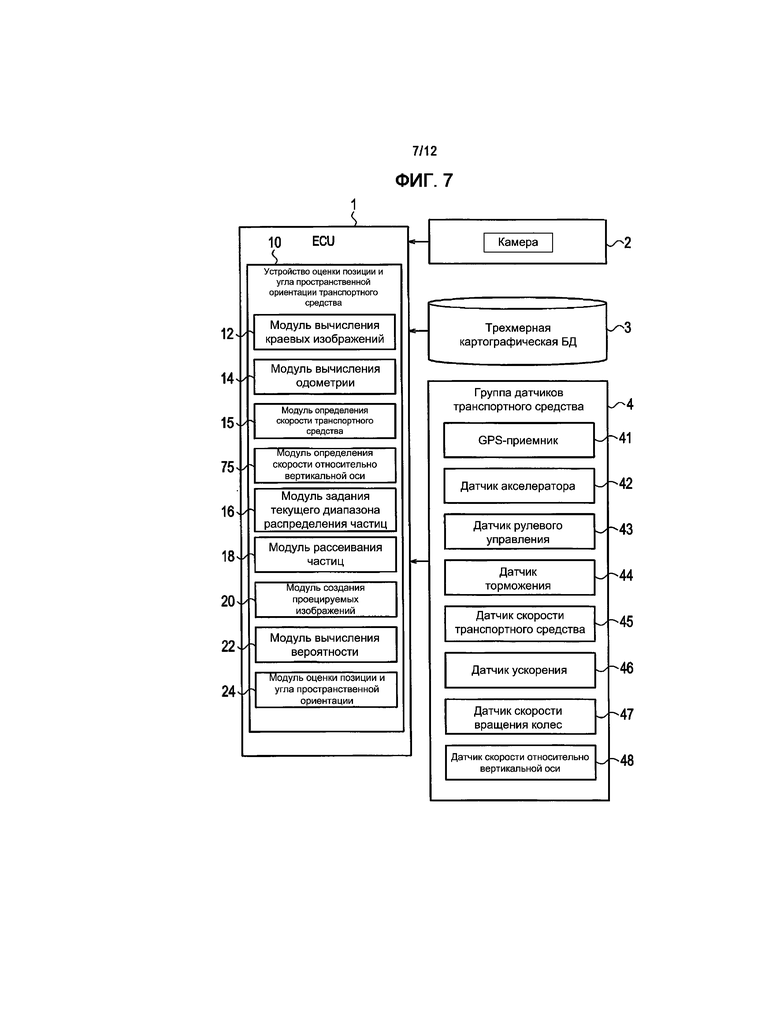
Фиг. 7 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно второму варианту осуществления настоящего изобретения.
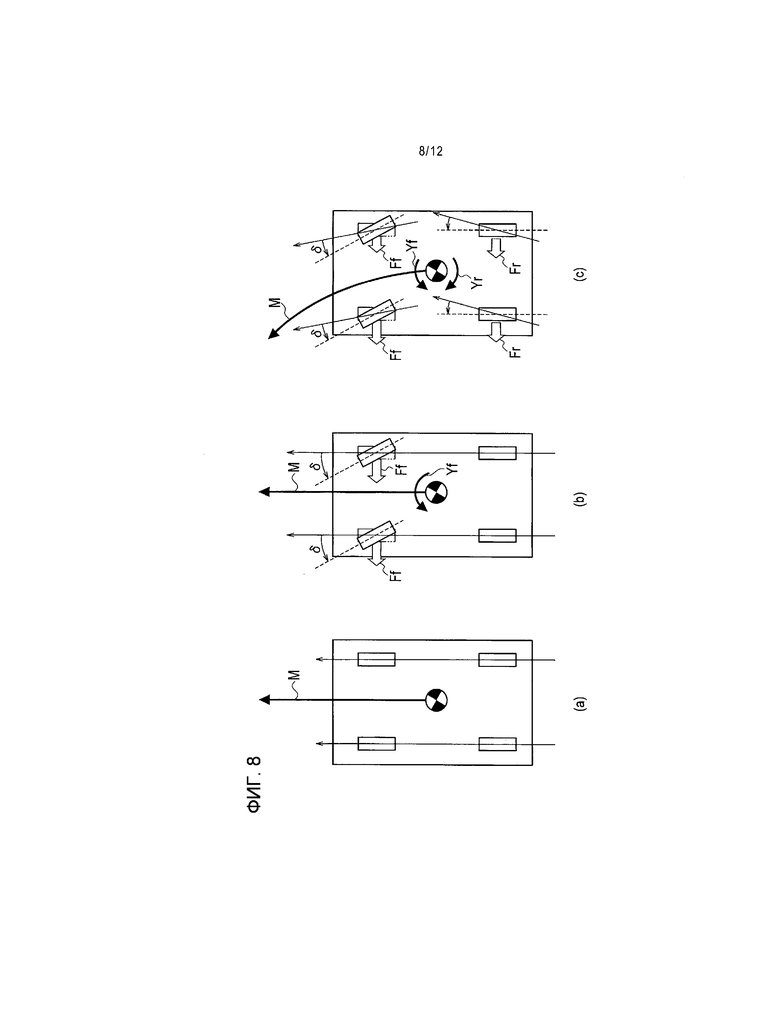
Фиг. 8 является набором схем для пояснения боковой силы на шине и момента рыскания, сформированного, когда транспортное средство поворачивает.
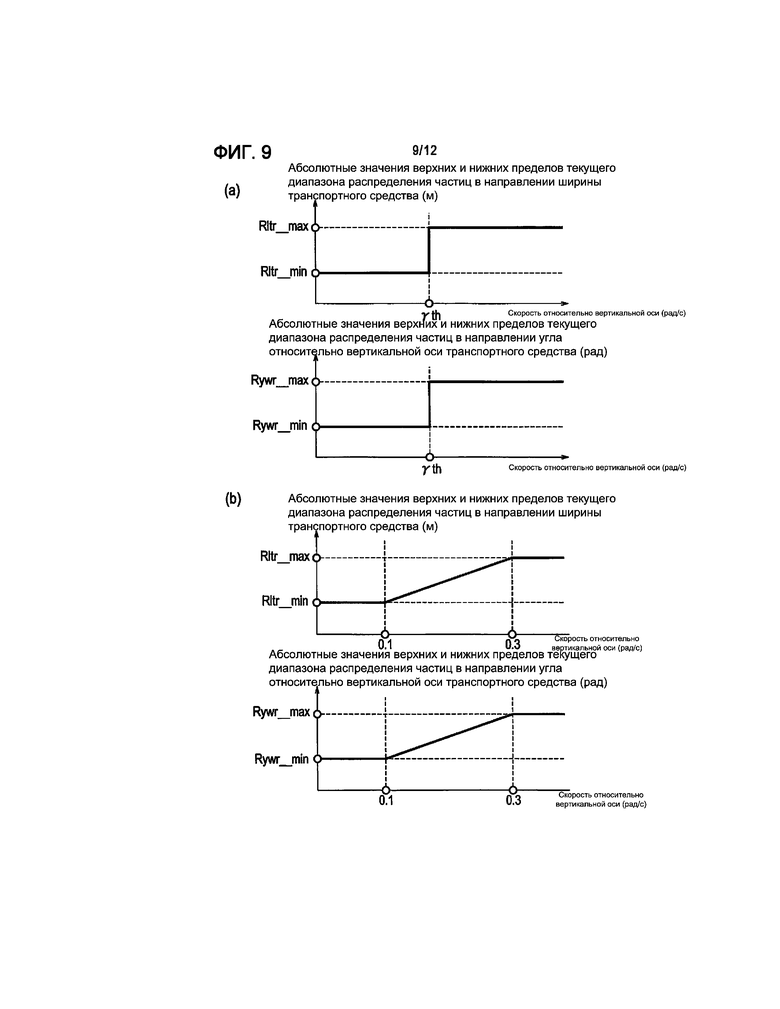
Фиг. 9 является набором графиков для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно второму варианту осуществления настоящего изобретения расширяет текущий диапазон распределения частиц в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства в соответствии с угловой скоростью рыскания.
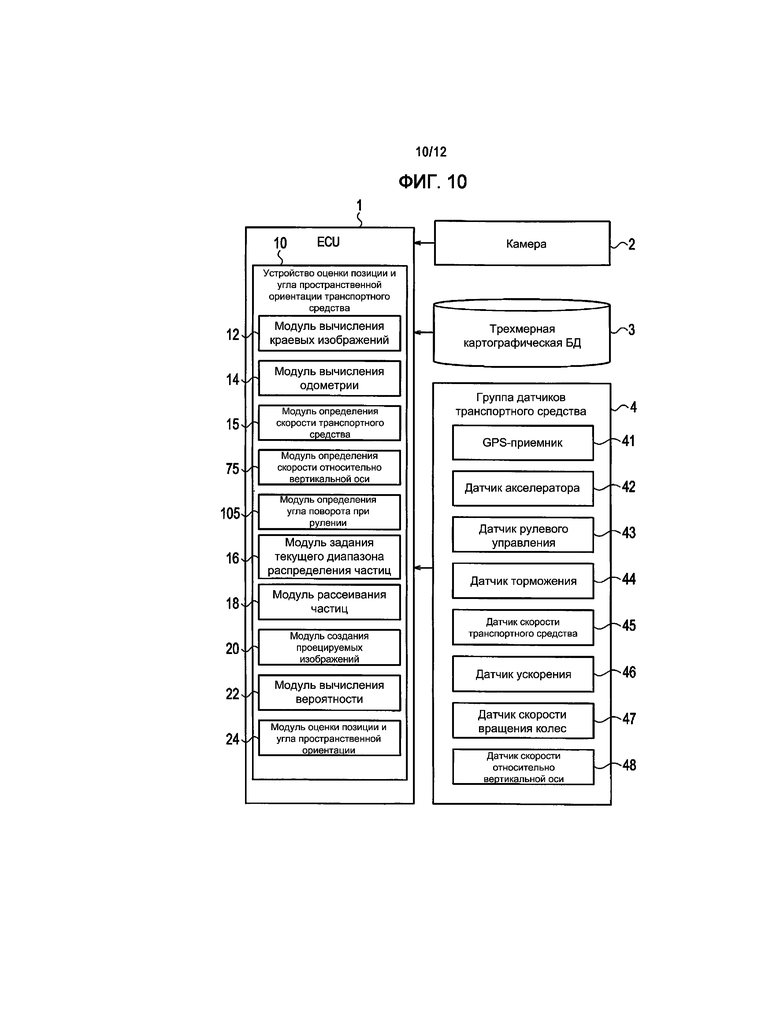
Фиг. 10 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно третьему варианту осуществления настоящего изобретения.
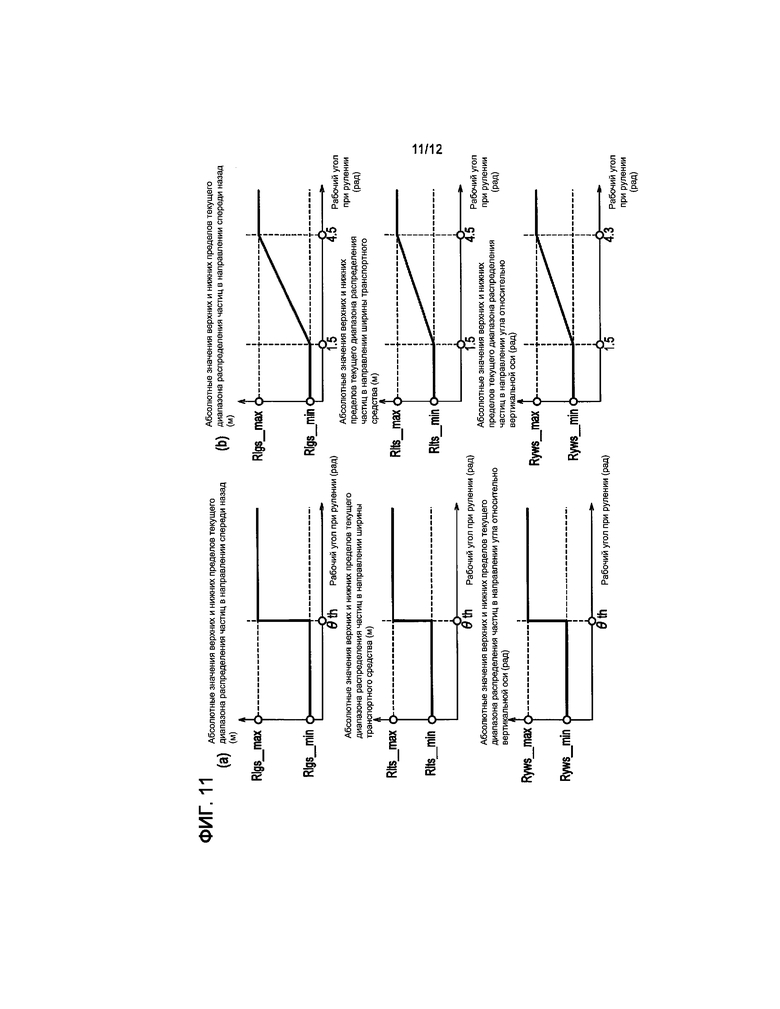
Фиг. 11 является набором графиков для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно третьему варианту осуществления настоящего изобретения расширяет текущий диапазон распределения частиц в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства в соответствии с рабочим углом руления.
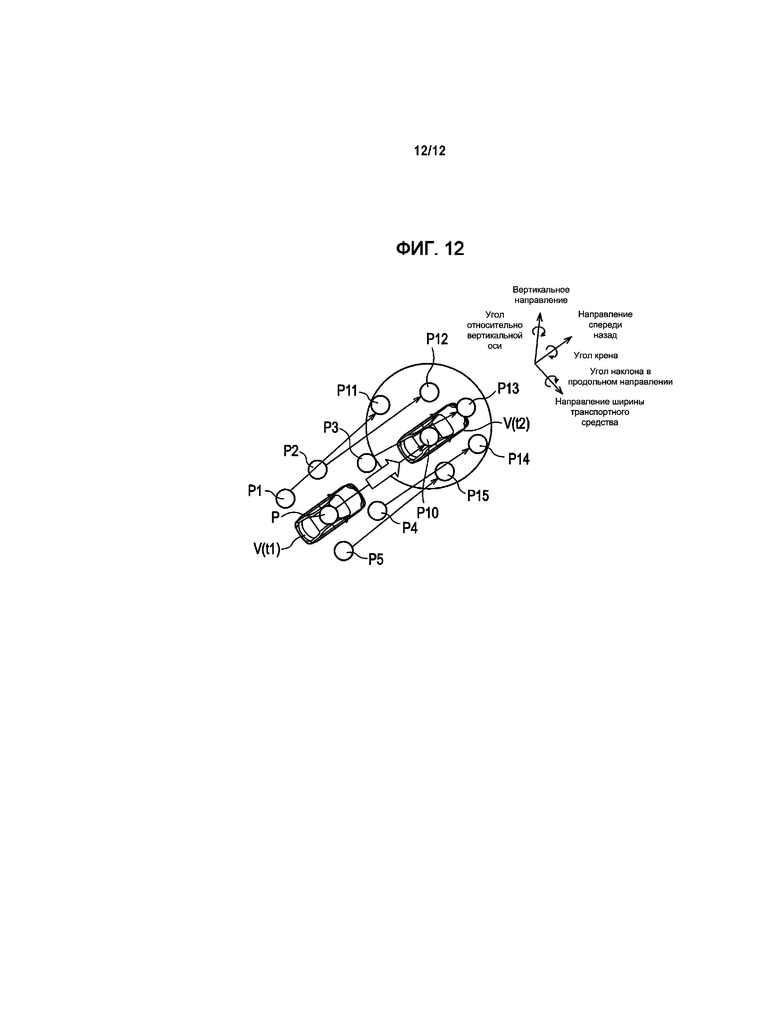
Фиг. 12 является схемой для пояснения способа, в котором устройство оценки позиции и угла пространственной ориентации транспортного средства согласно настоящему изобретению рассеивает частицы.
Подробное описание вариантов осуществления
[0009] Ниже поясняются первый-третий варианты осуществления, к которым применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Первый вариант осуществления
Конфигурация системы оценки позиции и угла пространственной ориентации транспортного средства
Фиг. 1 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления. Как показано на фиг. 1, система оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления включает в себя ЭБУ 1, камеру 2, трехмерную картографическую базу 3 данных и группу 4 датчиков транспортного средства.
[0011] Здесь, ЭБУ 1 представляет собой электронный блок управления, состоящий из ПЗУ, ОЗУ, арифметической схемы и т.п., и включает в себя устройство 10 оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления. Следует отметить, что ЭБУ, используемый для других процессов управления, может использоваться также в качестве ЭБУ 1.
[0012] Камера 2 использует полупроводниковый датчик изображений, такой как, например, ПЗС, и в этом варианте осуществления, смонтированный на переднем бампере транспортного средства таким образом, что его оптическая ось ориентирована горизонтально, и вид впереди транспортного средства может быть захвачен. Захваченные изображения передаются в ЭБУ 1.
[0013] В трехмерной картографической базе 3 данных, сохраняется, например, трехмерная позиционная информация по краям окрестности, включающая в себя разметочные линии на поверхности дороги и т.п. В этом варианте осуществления, по меньшей мере, записывается трехмерная информация относительно позиций и ориентаций зонирующих линий, бордюров и т.п., указывающая края дорог, и помимо этого, включается информация краев относительно разметочных линий на поверхности дороги, таких как сигнальные линии дорожной разметки, стоп-линии, разметки пешеходных переходов и линии дорожной разметки, а также таких конструкций, как здания. Следует отметить, что касательно формата данных в трехмерной картографической базе 3 данных, фрагменты картографической информации на краях дорог и т.п. заданы в качестве совокупности краев. В случае прямой линии с длинными краями, она разделяется, например, с 1-метровым интервалом, и в силу этого отсутствуют чрезвычайно длинные края. В случае прямой линии, каждый край хранит информацию трехмерной позиции, указывающую две противоположных конечных точки прямой линии. В случае кривой линии, каждый край хранит информацию трехмерной позиции, указывающую две противоположные конечные точки и центральную точку кривой линии.
[0014] Группа 4 датчиков транспортного средства включает в себя приемное GPS-устройство 41, датчик 42 акселератора, датчик 43 рулевого управления, датчик 44 торможения, датчик 45 скорости транспортного средства, датчик 46 ускорения, датчики 47 скорости вращения колес и датчик 48 угловой скорости рыскания. Группа 4 датчиков транспортного средства соединяется с ЭБУ 1 и выполнена с возможностью предоставлять различные типы значений определения, определенных посредством датчиков 41-48, в ЭБУ 1. ЭБУ 1 использует выходные значения из группы 4 датчиков транспортного средства, чтобы вычислять приблизительную позицию транспортного средства и вычислять одометрию, указывающую величину движения, на которое транспортное средство перемещается в единицу времени.
[0015] Устройство 10 оценки позиции и угла пространственной ориентации транспортного средства представляет собой устройство, выполненное с возможностью оценивать позицию и угол пространственной ориентации транспортного средства посредством выполнения сопоставления между изображением, захватывающим окрестности транспортного средства, и трехмерными картографическими данными. Посредством выполнения конкретной программы устройство 10 оценки позиции и угла пространственной ориентации транспортного средства работает в качестве модуля 12 вычисления краевых изображений, модуля 14 вычисления одометрии, модуля 15 определения скорости транспортного средства, модуля 16 задания текущего диапазона распределения частиц, модуля 18 рассеивания частиц, модуля 20 создания проецируемых изображений, модуля 22 вычисления вероятности и модуля 24 оценки позиции и угла пространственной ориентации.
[0016] Модуль 12 вычисления краевых изображений выполнен с возможностью получать изображение, захватывающее окрестности транспортного средства, из камеры 2 и определять края из этого изображения для того, чтобы вычислять краевое изображение. В изображении, захваченном посредством камеры 2, по меньшей мере, зонирующие линии и бордюры, представляющие концы дороги, захвачены в качестве информации поверхности дороги, необходимой для того, чтобы оценивать позицию и угол пространственной ориентации транспортного средства. Помимо этого, разметочные линии на поверхности дороги, такие как сигнальные линии дорожной разметки, стоп-линии, разметки пешеходных переходов и линии дорожной разметки, также могут захватываться в изображении.
[0017] Модуль 14 вычисления одометрии выполнен с возможностью вычислять одометрию, которая является величиной движения транспортного средства в единицу времени, посредством использования различных значений датчиков, полученных из группы 4 датчиков транспортного средства.
[0018] Модуль 15 определения скорости транспортного средства выполнен с возможностью определять скорость транспортного средства посредством получения значения датчика, измеряемого посредством датчика 45 скорости транспортного средства.
[0019] Модуль 16 задания текущего диапазона распределения частиц выполнен с возможностью задавать предварительно определенный текущий диапазон распределения частиц около позиции и угла пространственной ориентации, перемещенных посредством одометрии, вычисленной посредством модуля 14 вычисления одометрии, и корректировать текущий диапазон распределения частиц в соответствии с состоянием движения транспортного средства. В частности, как показано на фиг. 12, модуль 16 задания текущего диапазона распределения частиц, посредством одометрии, перемещает частицу P в позиции и под углом пространственной ориентации транспортного средства V(t1) и частицы P1-P5 вокруг, которые оценены в последнем цикле, и задает и корректирует текущий диапазон распределения частиц. В этом варианте осуществления, когда скорость, которая представляет состояние движения транспортного средства, становится высокой, модуль 16 задания текущего диапазона распределения частиц выполняет коррекцию, которая расширяет текущий диапазон распределения частиц в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства.
[0020] Модуль 18 рассеивания частиц выполнен с возможностью рассеивать частицы в текущем диапазоне распределения частиц, заданном посредством модуля 16 задания текущего диапазона распределения частиц. Как показано на фиг. 12, модуль 18 рассеивания частиц задает частицы P10-P15 для того, чтобы оценивать позицию и угол пространственной ориентации нового транспортного средства V(t2).
[0021] Модуль 20 создания проецируемых изображений выполнен с возможностью создавать проецируемое изображение для каждой из частиц, рассеянных посредством модуля 18 рассеивания частиц. Например, модуль 20 создания проецируемых изображений создает проецируемое изображение посредством подвергания информации трехмерной позиции относительно краев и т.п., сохраненной в трехмерной картографической базе 3 данных, преобразованию проекции таким образом, что информация трехмерной позиции преобразуется в изображение, захваченное посредством камеры, из позиции и угла пространственной ориентации частицы.
[0022] Модуль 22 вычисления вероятности выполнен с возможностью вычислять вероятность для каждой частицы посредством сравнения проецируемого изображения, созданного посредством модуля 20 создания проецируемых изображений, и краевого изображения, вычисленного посредством модуля 12 вычисления краевых изображений. Эта вероятность является индексом, указывающим, насколько вероятно то, что позиция и угол пространственной ориентации частицы представляют собой фактическую позицию и угол пространственной ориентации транспортного средства. Вероятность задается такой, что чем выше степень совпадения между проецируемым изображением и краевым изображением, тем выше вероятность.
[0023] Модуль 24 оценки позиции и угла пространственной ориентации выполнен с возможностью оценивать позицию и угол пространственной ориентации транспортного средства на основе вероятности, вычисленной посредством модуля 22 вычисления вероятности. Например, модуль 24 оценки позиции и угла пространственной ориентации вычисляет позицию и угол пространственной ориентации частицы с наибольшей вероятностью как результат оценки фактической позиции и угла пространственной ориентации транспортного средства.
[0024] Следует отметить, что в этом варианте осуществления, позиция и угол пространственной ориентации транспортного средства вычисляются с шестью степенями свободы (направление вперед-назад, направление ширины транспортного средства и вертикальное направление для позиции, а также крен, тангаж и рыскание для угла пространственной ориентации). Тем не менее настоящая технология также является применимой к оценке позиции и угла пространственной ориентации с тремя степенями свободы (направление вперед-назад и поперечное направление для позиции и рыскание для угла пространственной ориентации), например, для автоматически управляемого транспортного средства без подвесок и т.п., которое используется на заводах и т.п. В частности, в случае такого транспортного средства, позиция в вертикальном направлении, а также крен и тангаж для угла пространственной ориентации являются фиксированными; в силу этого эти параметры могут измеряться заранее и использоваться.
[0025] Процедура процесса оценки позиции и угла пространственной ориентации транспортного средства
Далее поясняется процедура процесса оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 2. Следует отметить, что в этом варианте осуществления, позиция и угол пространственной ориентации оцениваются всего с шестью степенями свободы: направление вперед-назад, направление ширины транспортного средства и вертикальное направление для получения информации позиции касательно транспортного средства, и крен, тангаж и рыскание для получения информации об угле пространственной ориентации касательно транспортного средства. Здесь, крен представляет направление вращения относительно оси вдоль направления вперед-назад транспортного средства, тангаж представляет направление вращения относительно оси вдоль направления ширины транспортного средства, и рыскание представляет направление вращения относительно оси вдоль вертикального направления транспортного средства (см. фиг. 12).
[0026] Кроме того, процесс оценки позиции и угла пространственной ориентации транспортного средства, который поясняется ниже, выполняется последовательно, например, с интервалом приблизительно в 100 мс.
[0027] Как показано на фиг. 2, во-первых на этапе S110, модуль 12 вычисления краевых изображений вычисляет краевое изображение из изображения камеры 2. Край в этом варианте осуществления означает точку, в которой резко изменяется яркость его пиксела. Способ Канни, например, может использоваться в качестве способа обнаружения краев. Различные другие способы, к примеру, дифференциальное обнаружение краев являются применимыми.
[0028] Между тем, желательно, чтобы модуль 12 вычисления краевых изображений извлекал направления изменений яркости краев, цвета вокруг краев и т.п. из изображения камеры 2. Таким образом, на этапах S160 и S170, которые описываются ниже, эти фрагменты информации, отличные от краев, записанные в трехмерную картографическую базу 3 данных, также могут быть использованы для того, чтобы задавать вероятность и вычислять позицию и угол пространственной ориентации транспортного средства.
[0029] Затем на этапе S120, модуль 14 вычисления одометрии вычисляет одометрию, которая является величиной перемещения транспортного средства в зону присутствия с момента вычисления на этапе S120 в последнем цикле, на основе значений датчиков, полученных от группы 4 датчиков транспортного средства. Следует отметить, что модуль 14 вычисления одометрии выполняет вычисление с одометрией, заданной равной нулю, в случае если цикл представляет собой первый цикл с момента запуска программы.
[0030] Что касается способа вычисления одометрии, при условии, что движение транспортного средства ограничено на плоскости, модуль 14 вычисления одометрии вычисляет величину поворота (угол поворота) в направлении угла рыскания из разности между значениями преобразователя датчиков 47 скорости вращения колес на левых и правых колесах. Затем величины движения в направлении вперед-назад и в направлении ширины транспортного средства могут получаться посредством вычисления средней величины движения из значения преобразователя датчика 47 скорости вращения колес для каждого колеса и вычисления косинуса и синуса угла поворота в направлении угла рыскания для этой средней величины движения. Альтернативно, величина движения и величина вращения в единицу времени могут вычисляться из скорости вращения колес для каждого колеса и угловой скорости рыскания. Кроме того, скорость транспортного средства или разность между позиционными значениями, измеряемыми посредством приемного GPS-устройства 41, могут использоваться вместо скорости вращения колес, и угол рулевого управления может использоваться вместо угловой скорости рыскания. Следует отметить, что в качестве способа вычисления одометрии, доступны различные возможные способы вычисления, и любой способ может использоваться при условии, что он допускает вычисление одометрии.
[0031] В частности, для более точного вычисления величин движения в направлении ширины транспортного средства и в направлении угла рыскания, одометрия может вычисляться на основе геометрии рулевого управления Аккермана ("JIDOSHA NO UNDO TO SEIGYO (MOTION AND CONTROL OF AUTOMOBILE)", глава 3, работа Masato Abe, опубликована посредством Sankaido Publishing Co., Ltd), когда скорость транспортного средства составляет чрезвычайно низкую скорость, например, приблизительно 10 км/ч или ниже. Кроме того, еще более желательно вычислять одометрию посредством использования уравнения движения линейной модели велосипеда, которая учитывает угол бокового скольжения шин ("JIDOSHA NO UNDO TO SEIGYO (MOTION AND CONTROL OF AUTOMOBILE)", глава 3, раздел 3.2.1, P. 56, (3.12) и (3.13), Masato Abe, опубликована посредством Sankaido Publishing Co., Ltd), когда скорость транспортного средства превышает вышеуказанную. Здесь, параметр шины каждого колеса (параметр поворота) должен измеряться заранее в случае использования уравнения движения линейной модели велосипеда.
[0032] Затем на этапе S130, модуль 16 задания текущего диапазона распределения частиц перемещает позицию и угол пространственной ориентации каждой частицы, оцененные на этапе S170 в последнем цикле, посредством одометрии, вычисленной на этапе S120 в текущем цикле. Здесь, в случае если цикл представляет собой первый цикл с момента запуска программы, отсутствует предыдущая информация позиции транспортного средства. В этом случае данные из приемного GPS-устройства 41, которое включено в группу 4 датчиков транспортного средства, используются в качестве исходной информации позиции. Альтернативно, последняя позиция и угол пространственной ориентации транспортного средства, вычисленные, когда транспортное средство остановлено прошлый раз, могут сохраняться и использоваться в качестве исходной позиции и угла пространственной ориентации.
[0033] Модуль 16 задания текущего диапазона распределения частиц затем задает текущий диапазон распределения частиц около позиции и угла пространственной ориентации транспортного средства, перемещенного посредством одометрии, с учетом динамических характеристик и состояния движения транспортного средства. При этом, в этом варианте осуществления, с учетом состояния движения транспортного средства, модуль 16 задания текущего диапазона распределения частиц расширяет текущий диапазон распределения частиц в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства, когда скорость становится высокой.
[0034] Ниже поясняется причина расширения текущего диапазона распределения частиц со ссылкой на фиг. 3. Фиг. 3 является набором схем, схематично иллюстрирующих центр поворота транспортного средства при повороте на установившейся скорости и угол бокового скольжения шин при этом. Часть (a) по фиг. 3 показывает случай, когда транспортное средство выполняет поворот в установившемся режиме на чрезвычайно низкой скорости, тогда как часть (b) по фиг. 3 показывает случай, когда транспортное средство выполняет поворот в установившемся режиме, который прилагает центробежную силу.
[0035] Как показано в части (a) по фиг. 3, на чрезвычайно низкой скорости, центробежная сила не прикладывается к транспортному средству, так что транспортное средство перемещается в направлении шин практически с отсутствием движения, сформированного в направлении ширины транспортного средства; следовательно, маловероятно, что одометрия имеет ошибку в направлении ширины транспортного средства.
[0036] Тем не менее, как показано в части (b) по фиг. 3, когда скорость транспортного средства становится высокой, центробежная сила прикладывается к транспортному средству, которая задает угол δ бокового скольжения колес и в силу этого формирует движение для транспортного средства в направлении ширины транспортного средства. По этой причине, одометрия с большой вероятностью имеет больше ошибок, обусловленных состоянием поверхности дороги, индивидуальным отличием движущегося тела и т.п., чем в состоянии чрезвычайно низкой скорости. В частности, модели транспортного средства имеют такие характеристики, что по мере того, как скорость транспортного средства становится высокой, центр Os поворота изменяется, и, в частности, вероятно то, что позиция транспортного средства в направлении вперед-назад, позиция транспортного средства в направлении ширины транспортного средства и угол пространственной ориентации транспортного средства в направлении угла рыскания, соответственно, имеют ошибки.
[0037] По этой причине, когда скорость транспортного средства становится высокой, текущий диапазон распределения частиц должен быть расширен в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания таким образом, что он является более широким, чем текущий диапазон распределения частиц на основе одометрии; в противном случае, возникают ошибки, и надлежащий текущий диапазон распределения частиц не может задаваться.
[0038] С учетом этого, в этом варианте осуществления, когда скорость становится высокой, текущий диапазон распределения частиц расширен в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства.
[0039] Ниже конкретно поясняется способ расширения текущего диапазона распределения частиц со ссылкой на фиг. 4-6.
[0040] Во-первых, поясняется расширение текущего диапазона распределения частиц в направлении вперед-назад транспортного средства. Как показано в части (a) по фиг. 4, когда скорость транспортного средства, определенная посредством модуля 15 определения скорости транспортного средства, ниже порогового значения Vlgth (км/ч), текущий диапазон распределения задается как диапазон, охватывающий ±Rlg_min (м) в направлении вперед-назад транспортного средства из позиции, перемещенной посредством одометрии. Когда скорость транспортного средства затем достигает или превышает пороговое значение Vlgth, текущий диапазон распределения расширен посредством задания текущего диапазона распределения как диапазона, охватывающего ±Rlg_max (м) в направлении вперед-назад транспортного средства.
[0041] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 3, по мере того, как скорость транспортного средства становится высокой, центр поворота транспортного средства перемещается к передней части транспортного средства и, соответственно, увеличивает ошибку в направлении вперед-назад транспортного средства, которая обусловлена состоянием поверхности дороги, индивидуальным отличием движущегося тела и т.п.
[0042] Альтернативно, как показано в части (b) по фиг. 4, текущий диапазон распределения может изменяться в направлении вперед-назад непрерывно со скоростью транспортного средства.
[0043] Следует отметить, что в этом варианте осуществления, Vlgth, Rlg_min и Rlg_max задаются, например, равными 20 (км/ч), 0,5 (м) и 1,0 (м), соответственно. Здесь, Vlgth является такой скоростью, что ошибка в направлении вперед-назад транспортного средства является большой. Кроме того, Rlg_min представляет текущий диапазон распределения частиц на таких низких скоростях, что ошибка в направлении вперед-назад транспортного средства является небольшой, и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования. Rlg_max представляет текущий диапазон распределения частиц на таких высоких скоростях, что ошибка в направлении вперед-назад транспортного средства является большой, и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования. Между тем текущий диапазон распределения частиц задается следующим образом в направлениях, отличных от направления вперед-назад. В частности, текущий диапазон распределения частиц задается равным ±0,5 (м), ±0,1 (м), ±0,5 (градусы), ±0,5 (градусы) и ±3,0 (градусы) в направлении ширины транспортного средства, в вертикальном направлении, в направлении крена, в направлении тангажа и в направлении рыскания, соответственно, из позиции и угла пространственной ориентации, перемещенной посредством одометрии.
[0044] Далее поясняется расширение текущего диапазона распределения частиц в направлении ширины транспортного средства. Как показано в части (a) по фиг. 5, когда скорость транспортного средства ниже порогового значения Vltth (км/ч), текущий диапазон распределения задается как диапазон, охватывающий ±Rlt_min (м) в направлении ширины транспортного средства из позиции, перемещенной посредством одометрии. Когда скорость транспортного средства затем достигает или превышает пороговое значение Vltth, текущий диапазон распределения расширен посредством задания текущего диапазона распределения частиц как диапазона, охватывающего ±Rlt_max (м) в направлении ширины транспортного средства.
[0045] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 3, когда скорость транспортного средства становится высокой, движение формируется для транспортного средства в направлении ширины транспортного средства во время поворота, которое не возникает, когда скорость транспортного средства является чрезвычайно низкой, и увеличивает ошибку в направлении ширины транспортного средства, которая обусловлена состоянием поверхности дороги, индивидуальным отличием движущегося тела и т.п.
[0046] Альтернативно, как показано в части (b) по фиг. 5, текущий диапазон распределения может изменяться в направлении ширины транспортного средства непрерывно со скоростью транспортного средства.
[0047] Следует отметить, что в этом варианте осуществления, Vltth, Rlt_min и Rlt_max задаются, например, равными 20 (км/ч), 0,2 (м) и 0,5 (м), соответственно. Здесь, Vltth является такой скоростью, что центробежная сила прикладывается к транспортному средству, в силу этого задавая угол бокового скольжения для колес и формируя движение для транспортного средства в направлении ширины транспортного средства. Кроме того, Rlt_min представляет текущий диапазон распределения частиц на таких низких скоростях, что движение не формируется для транспортного средства в направлении ширины транспортного средства, и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования. Rlt_max представляет текущий диапазон распределения частиц на таких высоких скоростях, что движение формируется для транспортного средства в направлении ширины транспортного средства, и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования.
[0048] Далее поясняется расширение текущего диапазона распределения частиц в направлении угла рыскания. Как показано в части (a) по фиг. 6, когда скорость транспортного средства ниже порогового значения Vywth (км/ч), текущий диапазон распределения задается как диапазон, охватывающий ±Ryw_min (рад) в направлении угла рыскания транспортного средства из угла пространственной ориентации, перемещенного посредством одометрии. Когда скорость транспортного средства затем достигает или превышает пороговое значение Vywth, текущий диапазон распределения расширен посредством задания текущего диапазона распределения как диапазона, охватывающего ±Ryw_max (рад) в направлении угла рыскания транспортного средства.
[0049] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 3, по мере того, как скорость транспортного средства становится высокой, центр поворота транспортного средства перемещается к передней части транспортного средства и, соответственно, увеличивает ошибку в направлении угла рыскания транспортного средства, которая обусловлена состоянием поверхности дороги, индивидуальным отличием движущегося тела и т.п.
[0050] Альтернативно, как показано в части (b) по фиг. 6, текущий диапазон распределения может изменяться в направлении угла рыскания непрерывно со скоростью транспортного средства.
[0051] Следует отметить, что в этом варианте осуществления, Vywth, Ryw_min и Ryw_max задаются, например, равными 10 (км/ч), 0,02 (рад) и 0,05 (рад), соответственно. Здесь, Vywth является такой скоростью, что центробежная сила прикладывается к транспортному средству, за счет этого задавая угол бокового скольжения для каждого колеса и формируя движение для транспортного средства в направлении угла рыскания. Кроме того, Ryw_min представляет текущий диапазон распределения частиц на таких низких скоростях, что движение не формируется для транспортного средства в направлении угла рыскания, и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования. Ryw_max представляет текущий диапазон распределения частиц на таких высоких скоростях, что движение формируется для транспортного средства в направлении угла относительно вертикальной, оси и задается равным надлежащему значению, вычисленному заранее через тесты и моделирования.
[0052] Затем на этапе S140, модуль 18 рассеивания частиц рассеивает частицы в текущем диапазоне распределения, заданном на этапе S130. Что касается способа рассеивания, модуль 18 рассеивания частиц случайно задает частицы в диапазоне (верхние и нижние пределы), заданном на этапе S130, посредством использования таблицы случайных чисел и т.п. для каждого из параметров с шестью степенями свободы, которые задают позицию и угол пространственной ориентации частиц. Между тем 500 частиц всегда создаются в этом варианте осуществления.
[0053] Следует отметить, что частицы могут рассеиваться с использованием технологии, раскрытой в патентном документе 1. В этом случае процесс может заключать в себе: вычисление того, насколько позиция и угол пространственной ориентации транспортного средства, перемещенные посредством одометрии на этапе S130, корректируются посредством позиции и угла пространственной ориентации, вычисленных на этапе S170; задание среднего значения и распределения для рассеивания частиц в соответствии с этими величинами коррекции; и затем рассеивание частиц, соответственно. При этом текущий диапазон распределения, заданный на этапе S130, используется в качестве диапазона, в котором можно рассеивать частицы. Кроме того, текущий диапазон распределения также может вычисляться с использованием технологии, раскрытой в патентном документе 1. Как этот текущий диапазон распределения, так и текущий диапазон распределения, заданный на этапе S130, могут использоваться в качестве диапазона, в котором можно рассеивать частицы. Дополнительно, число частиц, которые должны рассеиваться, также может определяться динамически в соответствии с текущим диапазоном распределения, заданным на этапе S130 посредством использования технологии, раскрытой в патентном документе 1.
[0054] Затем на этапе S150, модуль 20 создания проецируемых изображений создает проецируемое изображение (виртуальное изображение) для каждой из множества частиц, рассеянных на этапе S140. При этом, например, информация трехмерной позиции относительно краев и т.п., сохраненная в трехмерной картографической базе 3 данных, подвергается преобразованию проекции в изображение, снятое камерой для каждой прогнозной позиции и возможного варианта угла пространственной ориентации, так что создается проецируемое изображение для оценки. Группа точек оценки, проецированных на это проецируемое изображение, сравнивается на этапе S160, который описывается ниже, с краями в краевом изображении, вычисленными на этапе S110.
[0055] Между тем преобразование проекции требует внешнего параметра, указывающего позицию камеры 2, и внутренних параметров камеры 2. Внешний параметр может вычисляться из прогнозной позиции и возможного варианта угла пространственной ориентации посредством измерения относительной позиции из транспортного средства до камеры 2 заранее, в то время как внутренние параметры могут калиброваться заранее.
[0056] Следует отметить, что в случае, если направления изменений яркости краев, цвета вокруг краев и т.п. извлечены из изображения, снятого камерой на этапе S110, желательно создавать проецируемое изображение посредством использования их.
[0057] Затем на этапе S160, для каждой из множества частиц, рассеянных на этапе S140, модуль 22 вычисления вероятности сравнивает краевое изображение, вычисленное на этапе S110, и проецируемое изображение, созданное на этапе S150. Затем на основе результата сравнения модуль 22 вычисления вероятности вычисляет вероятность для каждой из частиц, которые представляют прогнозные позиции и возможные варианты углов пространственной ориентации. Эта вероятность является индексом, указывающим, насколько вероятно то, что прогнозная позиция и возможный вариант угла пространственной ориентации представляют собой фактическую позицию и угол пространственной ориентации транспортного средства. Модуль 22 вычисления вероятности задает вероятность таким образом, что чем выше степень совпадения между проецируемым изображением и краевым изображением, тем выше вероятность. Ниже поясняется пример того, как вычислять эту вероятность.
[0058] Во-первых, находится пиксельная позиция в проецируемом изображении, и определяется то, присутствует или нет край в этой пиксельной позиции. Затем определяется то, присутствует или нет край в позиции в краевом изображении, идентичной пиксельной позиции в проецируемом изображении. Если эти позиции совпадают друг с другом с точки зрения присутствия или отсутствия края, задается значение правдоподобия (единица: н/д) в 1, а если нет, задается значение правдоподобия в 0. Эта операция выполняется для всех точек оценки, и ее сумма или число совпадающих точек оценки определяется в качестве вероятности. После того, как вероятность вычисляется для каждой из частиц, которые представляют все прогнозные позиции и возможные варианты углов пространственной ориентации, вероятность каждой частицы нормализована таким образом, что их сумма может быть равна 1. Следует отметить, что в качестве способа вычисления вероятности, доступно множество других возможных способов вычисления, и может использоваться любой из них.
[0059] Затем на этапе S170, модуль 24 оценки позиции и угла пространственной ориентации вычисляет конечную позицию и угол пространственной ориентации транспортного средства посредством использования множества прогнозных позиций и возможных вариантов углов пространственной ориентации, обладающих информацией вероятности, вычисленной на этапе S160. Например, модуль 24 оценки позиции и угла пространственной ориентации вычисляет прогнозную позицию и возможный вариант угла пространственной ориентации с наибольшей вероятностью в качестве фактической позиции и угла пространственной ориентации транспортного средства. Альтернативно, модуль 24 оценки позиции и угла пространственной ориентации может вычислять взвешенное среднее прогнозных позиций и углов пространственной ориентации посредством использования вероятности каждой прогнозной позиции и возможного варианта угла пространственной ориентации и задавать эти значения в качестве конечной позиции и угла пространственной ориентации транспортного средства. После того, как результат оценки позиции и угла пространственной ориентации транспортного средства вычислен таким способом, процесс оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления завершается.
[0060] В этом варианте осуществления, позиция и угол пространственной ориентации транспортного средства оценивается посредством согласования между изображением, захваченным посредством камеры 2, смонтированной на транспортном средстве, и трехмерной картографической базой 3 данных. Тем не менее, следует отметить, что позиция и угол пространственной ориентации транспортного средства могут оцениваться с использованием значений, измеряемых посредством лазерного датчика, как раскрыто в патентном документе 1.
[0061] В этом случае, например, информация позиции относительно помех в форме столбов, таких как столбы линии электропередач, азимут и расстояние до транспортного средства для которых могут измеряться с помощью лазерного датчика, и информация относительно позиций и форм конструкций, таких как здания и ограждения вокруг дороги, включена в трехмерную картографическую базу 3 данных в форме карты занятости с сеткой.
[0062] Эта карта занятости с сеткой выражает карту посредством секционирования среды на небольшие ячейки в матрице и добавления вероятности занятности в каждую ячейку, указывающей то, занята или нет ячейка посредством помехи ("Probabilistic Robotics", глава 9, опубликована посредством Mainichi Communications Inc.).
[0063] Затем на этапе S150 на блок-схеме последовательности операций способа на фиг. 2, для каждой частицы то, как помехи и конструкции, сохраненные в трехмерной картографической базе 3 данных, должны быть расположены, если транспортное средство присутствует в позиции и под углом пространственной ориентации частицы, вычисляется и проецируется на карту занятости с сеткой.
[0064] После этого, на этапе S160 на блок-схеме последовательности операций способа на фиг. 2, для каждой частицы, вероятность вычисляется посредством подсчета, сколько из ячеек, занимаемых посредством помех и конструкций, сохраненных в трехмерной картографической базе 3 данных, определяются на карте занятости с сеткой посредством лазерного датчика.
[0065] Как описано выше, позиция и угол пространственной ориентации могут оцениваться посредством изменения операций на этапах S150 и S160 на блок-схеме последовательности операций способа на фиг. 2 или посредством использования способа, описанного в "Probabilistic Robotics", глава 8 (опубликована посредством Mainichi Communications Inc.).
[0066] Преимущества первого варианта осуществления
Как подробно пояснено выше, устройство оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления является таким, что текущий диапазон распределения частиц расширен в направлении ширины транспортного средства, когда скорость транспортного средства становится высокой. Таким образом, даже когда скорость транспортного средства становится высокой, за счет этого формируя движение для транспортного средства в направлении ширины транспортного средства, текущий диапазон распределения частиц может задаваться надлежащим образом, и в силу этого могут точно оцениваться позиция и угол пространственной ориентации транспортного средства.
[0067] Кроме того, устройство оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления является таким, что текущий диапазон распределения частиц расширен в направлении угла рыскания транспортного средства, когда скорость транспортного средства становится высокой. Таким образом, даже когда скорость транспортного средства становится высокой, за счет этого формируя движение для транспортного средства в направлении угла рыскания, текущий диапазон распределения частиц может задаваться надлежащим образом, и в силу этого могут точно оцениваться позиция и угол пространственной ориентации транспортного средства.
[0068] Второй вариант осуществления
Далее поясняется устройство оценки позиции и угла пространственной ориентации транспортного средства согласно второму варианту осуществления настоящего изобретения со ссылкой на чертежи.
[0069] Конфигурация системы оценки позиции и угла пространственной ориентации транспортного средства
Фиг. 7 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления. Как показано на фиг. 7, устройство 10 оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления отличается от устройства оценки позиции и угла пространственной ориентации транспортного средства в первом варианте осуществления тем, что оно дополнительно включает в себя модуль 75 определения угловой скорости рыскания. Следует отметить, что другие признаки являются идентичными признакам в первом варианте осуществления, и следовательно, обозначаются посредством идентичных ссылок с номерами, и их подробное пояснение опускается.
[0070] Модуль 75 определения угловой скорости рыскания выполнен с возможностью определять угловую скорость рыскания, которая представляет собой скорость изменения транспортного средства в направлении угла рыскания, посредством получения значения датчика, измеряемого посредством датчика 48 угловой скорости рыскания.
[0071] Процедура процесса оценки позиции и угла пространственной ориентации транспортного средства
Процесс оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления отличается от процесса оценки позиции и угла пространственной ориентации транспортного средства в первом варианте осуществления способом задания текущего диапазона распределения частиц, который выполняется на этапе S130 на фиг. 2. Отличие заключается в том, что тогда как текущий диапазон распределения частиц задается в соответствии со скоростью транспортного средства в первом варианте осуществления, текущий диапазон распределения частиц задается в соответствии с угловой скоростью рыскания транспортного средства в этом варианте осуществления.
[0072] На этапе S130 на фиг. 2, модуль 16 задания текущего диапазона распределения частиц перемещает позицию и угол пространственной ориентации каждой частицы в последнем цикле посредством одометрии. Затем модуль 16 задания текущего диапазона распределения частиц задает текущий диапазон распределения частиц около позиции и угла пространственной ориентации транспортного средства, перемещаемого таким образом, и в этом варианте осуществления, расширяет текущий диапазон распределения частиц в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства, когда угловая скорость рыскания транспортного средства становится высокой.
[0073] Ниже поясняется причина расширения текущего диапазона распределения частиц, когда угловая скорость рыскания транспортного средства становится высокой, со ссылкой на фиг. 8. Фиг. 8 является набором схем, показывающих боковую силу на шине и момент рыскания, сформированные, когда транспортное средство поворачивает. Часть (a) по фиг. 8 показывает транспортное средство, перемещающееся прямо, часть (b) по фиг. 8 показывает транспортное средство сразу после поворота передних колес, а часть (c) по фиг. 8 показывает транспортное средство при повороте в установившемся режиме движения.
[0074] Допустим, что тогда как транспортное средство перемещается в направлении M перемещения при том, что руль транспортного средства зафиксирован в позиции нейтрали, как показано в части (a) по фиг. 8, руль поворачивается на такой высокой скорости транспортного средства, что угол δ бокового скольжения задается для колес, как пояснено в отношении части (b) по фиг. 3. Как результат, как показано в части (b) по фиг. 8, угол δ бокового скольжения задается сначала для передних колес сразу после поворота, и боковая сила Ff на шине формируется на передних колесах. Эта боковая сила Ff на шине, в свою очередь, формирует момент Yf рыскания, и поворот начинается. В этом состоянии, движение в направлении угла рыскания является доминирующим, и, следовательно, угол пространственной ориентации с большой вероятностью имеет ошибку в направлении угла рыскания.
[0075] По мере того, как поддерживается состояние поворачивания в части (b) по фиг. 8, момент Yf рыскания посредством боковой силы Ff на шине из передних колес и момент Yr рыскания посредством боковой силы Fr на шине из задних колес приходят в равновесие, как показано в части (c) по фиг. 8. Как результат, угловая скорость рыскания прекращает возрастать, и достигается состояние поворота в установившемся режиме. В этом состоянии, в дополнение к движению транспортного средства в направлении угла рыскания, ускорение в направлении ширины транспортного средства является большим, и, следовательно, позиция с большой вероятностью также имеет ошибку в направлении ширины транспортного средства.
[0076] По этой причине, когда транспортное средство поворачивает таким образом, что угловая скорость рыскания является высокой, текущий диапазон распределения частиц должен быть расширен в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства; в противном случае, возникают ошибки, и надлежащий текущий диапазон распределения частиц не может задаваться.
[0077] С учетом этого, в этом варианте осуществления, когда угловая скорость рыскания становится высокой, текущий диапазон распределения частиц расширен в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства.
[0078] Ниже конкретно поясняется способ расширения текущего диапазона распределения частиц со ссылкой на фиг. 9.
[0079] Как показано в части (a) по фиг. 9, когда угловая скорость рыскания, определенная посредством модуля 75 определения угловой скорости рыскания, ниже порогового значения γth (рад/с), текущий диапазон распределения задается как диапазон, охватывающий ±Rltr_min (м) в направлении ширины транспортного средства из позиции, перемещенной посредством одометрии. Кроме того, текущий диапазон распределения задается как диапазон, охватывающий ±Rywr_min (рад) в направлении угла рыскания из угла пространственной ориентации, перемещенного посредством одометрии. Когда угловая скорость рыскания затем достигает или превышает пороговое значение γth, текущий диапазон распределения расширен посредством задания текущего диапазона распределения как диапазона, охватывающего ±Rltr_max (м) в направлении ширины транспортного средства и ±Rywr_max (рад) в направлении угла рыскания.
[0080] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 8, по мере того, как угловая скорость рыскания и ускорение в направлении ширины транспортного средства становятся высокими, угол бокового скольжения формируется на колесах, и позиция и угол пространственной ориентации, вычисленные посредством одометрии, с большой вероятностью имеют ошибки. С учетом этого, в этом варианте осуществления, текущий диапазон распределения задается шире посредством учета увеличения ошибок в направлении ширины транспортного средства и в направлении угла рыскания, которые обусловлены состоянием поверхности дороги, индивидуальным отличием движущегося тела и т.п.
[0081] Альтернативно, как показано в части (b) по фиг. 9, текущий диапазон распределения может изменяться непрерывно с угловой скоростью рыскания.
[0082] Следует отметить, что в этом варианте осуществления, γth, Rltr_min, Rltr_max, Rywr_min и Rywr_max задаются, например, равными 0,15 (рад/с), 0,2 (м), 0,5 (м), 0,02 (рад) и 0,05 (рад), соответственно. Здесь, γth является такой угловой скоростью рыскания, что поворачивание транспортного средства формирует движение в направлении угла рыскания и в направлении ширины транспортного средства. Кроме того, Rltr_min и Rywr_min представляют текущие диапазоны распределения частиц на таких низких угловых скоростях рыскания, что движение не формируется для транспортного средства в направлении ширины транспортного средства и в направлении угла рыскания, и задаются равными надлежащим значениям, вычисленным заранее через тесты и моделирования. Rltr_max и Rywr_max представляют текущие диапазоны распределения частиц на таких высоких угловых скоростях рыскания, что движение формируется для транспортного средства в направлении ширины транспортного средства и в направлении угла рыскания, и задаются равными надлежащим значениям, вычисленным заранее через тесты и моделирования.
[0083] Дополнительно, текущий диапазон распределения частиц также может задаваться с использованием как способа этого варианта осуществления, так и способа первого варианта осуществления. В этом случае, в каждом направлении, большие верхние и нижние предельные значения могут использоваться для того, чтобы задавать текущий диапазон распределения.
[0084] Кроме того, модуль 16 задания текущего диапазона распределения частиц согласно этому варианту осуществления управляет текущим диапазоном распределения частиц таким образом, что когда угловая скорость рыскания транспортного средства становится высокой, текущий диапазон распределения частиц расширен в направлении ширины транспортного средства после истечения предварительно определенного периода времени после расширения текущего диапазона распределения частиц в направлении угла рыскания транспортного средства. Например, модуль 16 задания текущего диапазона распределения частиц расширяет текущий диапазон распределения частиц в направлении ширины транспортного средства с первым запаздыванием на постоянную времени в 0,5[с] после расширения текущего диапазона распределения частиц в направлении угла рыскания.
[0085] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 8, позиция транспортного средства в направлении ширины транспортного средства изменяется с запаздыванием, соответствующим углу пространственной ориентации в направлении угла рыскания.
[0086] Поскольку текущий диапазон распределения расширен в направлении ширины транспортного средства с запаздыванием после расширения текущего диапазона распределения в направлении угла рыскания, как описано выше, текущий диапазон распределения частиц может быть надлежащим образом задан в соответствии с изменением позиции транспортного средства в направлении ширины транспортного средства, которое возникает с запаздыванием, соответствующим углу пространственной ориентации в направлении угла рыскания.
[0087] Следует отметить, что движение транспортного средства в направлении угла рыскания имеет запаздывание в ответ на операцию руления водителя вследствие механизма рулевого управления и боковой силы на шине. Чтобы разрешать это, может задерживаться время на то, чтобы расширять текущий диапазон распределения частиц в направлении угла рыскания в ответ на операцию руления. В частности, текущий диапазон распределения частиц может быть расширен в направлении угла рыскания с первым запаздыванием на постоянную времени, например, в 0,2[с] после операции руления водителем.
[0088] Преимущества второго варианта осуществления
Как подробно пояснено выше, устройство оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления является таким, что текущий диапазон распределения частиц расширен в направлении угла рыскания транспортного средства, когда угловая скорость рыскания транспортного средства становится высокой. Таким образом, даже когда угловая скорость рыскания транспортного средства становится высокой, за счет этого формируя движение для транспортного средства в направлении угла рыскания, текущий диапазон распределения частиц может задаваться надлежащим образом, и в силу этого могут точно оцениваться позиция и угол пространственной ориентации транспортного средства.
[0089] Кроме того, устройство оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления является таким, что когда угловая скорость рыскания транспортного средства становится высокой, текущий диапазон распределения частиц расширен в направлении ширины транспортного средства после истечения предварительно определенного периода времени после расширения текущего диапазона распределения частиц в направлении угла рыскания транспортного средства. Таким образом, текущий диапазон распределения частиц может быть надлежащим образом задан в соответствии с изменением позиции транспортного средства в направлении ширины транспортного средства, которое возникает с запаздыванием, соответствующим углу пространственной ориентации в направлении угла рыскания.
[0090] Третий вариант осуществления
Далее поясняется устройство оценки позиции и угла пространственной ориентации транспортного средства согласно третьему варианту осуществления настоящего изобретения со ссылкой на чертежи.
[0091] Конфигурация системы оценки позиции и угла пространственной ориентации транспортного средства
Фиг. 10 является блок-схемой, показывающей конфигурацию системы оценки позиции и угла пространственной ориентации транспортного средства, оснащенного устройством оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления. Как показано на фиг. 10, устройство 10 оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления отличается от устройства оценки позиции и угла пространственной ориентации транспортного средства в первом варианте осуществления тем, что оно дополнительно включает в себя модуль 105 определения угла рулевого управления. Следует отметить, что другие признаки являются идентичными признакам во втором варианте осуществления, и следовательно, обозначаются посредством идентичных ссылок с номерами, и их подробное пояснение опускается.
[0092] Модуль 105 определения угла рулевого управления выполнен с возможностью определять угол рулевого управления транспортного средства посредством получения значения датчика, измеряемого посредством датчика 43 рулевого управления.
[0093] Процедура процесса оценки позиции и угла пространственной ориентации транспортного средства
Процесс оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления отличается от процесса оценки позиции и угла пространственной ориентации транспортного средства в первом варианте осуществления способом задания текущего диапазона распределения частиц, который выполняется на этапе S130 на фиг. 2. Отличие заключается в том, что тогда как текущий диапазон распределения частиц задается в соответствии со скоростью транспортного средства в первом варианте осуществления, текущий диапазон распределения частиц задается в соответствии с рабочим углом руления транспортного средства в этом варианте осуществления.
[0094] На этапе S130 на фиг. 2, модуль 16 задания текущего диапазона распределения частиц перемещает позицию и угол пространственной ориентации каждой частицы в последнем цикле посредством одометрии. Затем модуль 16 задания текущего диапазона распределения частиц задает текущий диапазон распределения частиц около позиции и угла пространственной ориентации транспортного средства, перемещаемого таким образом, и расширяет текущий диапазон распределения частиц в направлении вперед-назад, в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства, когда рабочий угол руления транспортного средства становится большим.
[0095] Ниже конкретно поясняется способ расширения текущего диапазона распределения частиц со ссылкой на фиг. 11.
[0096] Как показано в части (a) по фиг. 11, когда рабочий угол руления, определенный посредством модуля 105 определения угла рулевого управления, меньше порогового значения θth, текущий диапазон распределения задается как диапазон, охватывающий ±Rlgs_min (м) в направлении вперед-назад транспортного средства и ±Rlts_min (м) в направлении ширины транспортного средства из позиции, перемещенной посредством одометрии. Кроме того, текущий диапазон распределения задается как диапазон, охватывающий ±Ryws_min (рад) в направлении угла рыскания из угла пространственной ориентации, перемещенного посредством одометрии. Когда рабочий угол руления затем достигает или превышает пороговое значение θth, текущий диапазон распределения расширен посредством задания текущего диапазона распределения как диапазона, охватывающего ±Rlgs_max (м) в направлении вперед-назад транспортного средства и ±Rlts_max (м) в направлении ширины транспортного средства. Кроме того, текущий диапазон распределения расширен посредством задания текущего диапазона распределения частиц как диапазона, охватывающего ±Ryws_max (рад) в направлении угла рыскания.
[0097] Это выполняется, поскольку, как пояснено со ссылкой на фиг. 8, по мере того, как угловая скорость рыскания и ускорение в направлении ширины транспортного средства становятся высокими, угол бокового скольжения формируется на колесах, и в силу этого позиция и угол пространственной ориентации имеют ошибки, и вероятно то, что ошибки являются большими, если руление представляет собой поворачивание.
[0098] Альтернативно, как показано в части (b) по фиг. 11, текущий диапазон распределения может изменяться непрерывно с рабочим углом руления.
[0099] Следует отметить, что в этом варианте осуществления, θth, Rlgs_min, Rlts_min и Ryws_min задаются, например, равными 3 (рад), 0,2 (м), 0,2 (м) и 0,02 (рад), соответственно. Кроме того, Rlgs_max, Rlts_max и Ryws_max задаются равными 1,0 (м), 0,5 (м) и 0,05 (рад), соответственно. Здесь, θth является таким рабочим углом руления, что поворачивание транспортного средства формирует движение в направлении угла рыскания и в направлении ширины транспортного средства, и в силу этого ошибки становятся большими. Кроме того, Rlgs_min, Rlts_min и Ryws_min представляют текущие диапазоны распределения частиц при таких небольших рабочих углах руления, что движение не формируется для транспортного средства в направлении ширины транспортного средства и в направлении угла рыскания, и задаются равными надлежащим значениям, вычисленным заранее через тесты и моделирования. Rlgs_max, Rlts_max и Ryws_max представляют текущие диапазоны распределения частиц при таких больших рабочих углах руления, что движение формируется для транспортного средства в направлении ширины транспортного средства и в направлении угла рыскания, и задаются равными надлежащим значениям, вычисленным заранее через тесты и моделирования.
[0100] Дополнительно, текущий диапазон распределения частиц также может задаваться с использованием как способа этого варианта осуществления, так и способов первого и второго вариантов осуществления. В этом случае, в каждом направлении, большие верхние и нижние предельные значения могут использоваться для того, чтобы задавать текущий диапазон распределения.
[0101] Преимущества третьего варианта осуществления
Как подробно пояснено выше, устройство оценки позиции и угла пространственной ориентации транспортного средства согласно этому варианту осуществления является таким, что текущий диапазон распределения расширен в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства, когда угол рулевого управления транспортного средства становится большим. Таким образом, даже когда угол рулевого управления становится большим, за счет этого формируя движения в направлении ширины транспортного средства и в направлении угла рыскания, текущий диапазон распределения частиц может задаваться надлежащим образом, и в силу этого могут точно оцениваться позиция и угол пространственной ориентации транспортного средства.
[0102] Следует отметить, что вышеописанные варианты осуществления являются простыми примерами настоящего изобретения, и следовательно, настоящее изобретение не ограничено вышеописанными вариантами осуществления. В режимах, отличных от этих вариантов осуществления, конечно, также различные изменения вноситься в соответствии с конструкцией и т.п. без отступления от технической идеи настоящего изобретения.
[0103] Данная заявка притязает на приоритет заявки на патент (Япония) № 2013-160074, поданной 1 августа 2013 года, содержимое которой полностью содержится в данном документе по ссылке.
Список номеров ссылок
[0104] 1 – ЭБУ
2 – камера
3 – трехмерная картографическая база данных
4 – группа датчиков транспортного средства
10 – устройство оценки позиции и угла пространственной ориентации транспортного средства
12 – модуль вычисления краевых изображений
14 – модуль вычисления одометрии
15 – модуль определения скорости транспортного средства
16 – модуль задания текущего диапазона распределения частиц
18 – модуль рассеивания частиц
20 – модуль создания проецируемых изображений
22 – модуль вычисления вероятности
24 – модуль оценки позиции и угла пространственной ориентации
41 – приемное GPS-устройство
42 – датчик акселератора
43 – датчик рулевого управления
44 – датчик торможения
45 – датчик скорости транспортного средства
46 – датчик ускорения
47 – датчик скорости вращения колес
48 – датчик угловой скорости рыскания
75 – модуль определения угловой скорости рыскания
105 – модуль определения угла рулевого управления.
Изобретение относится к устройству оценки позиции и угла пространственной ориентации транспортного средства. Устройство задает текущий диапазон распределения частиц как предварительно определенный диапазон с помощью фильтра. А также рассеивает частицы в заданном текущем диапазоне распределения, чтобы оценивать позицию и угол пространственной ориентации транспортного средства с помощью изображения. Камера смонтирована на транспортном средстве. Транспортное средство имеет передние колеса и задние колеса, перемещается в направлении спереди назад и выполняет поворот в направлении ширины транспортного средства. Устройство также содержит модуль определения скорости транспортного средства и модуль задания текущего диапазона распределения частиц. Модуль задания текущего диапазона распределения частиц выполнен с возможностью расширения текущего диапазона распределения, когда скорость транспортного средства становится высокой. Достигается повышение точности оценки позиции и угла пространственной ориентации транспортного средства. 2 н. и 4 з.п. ф-лы, 20 ил.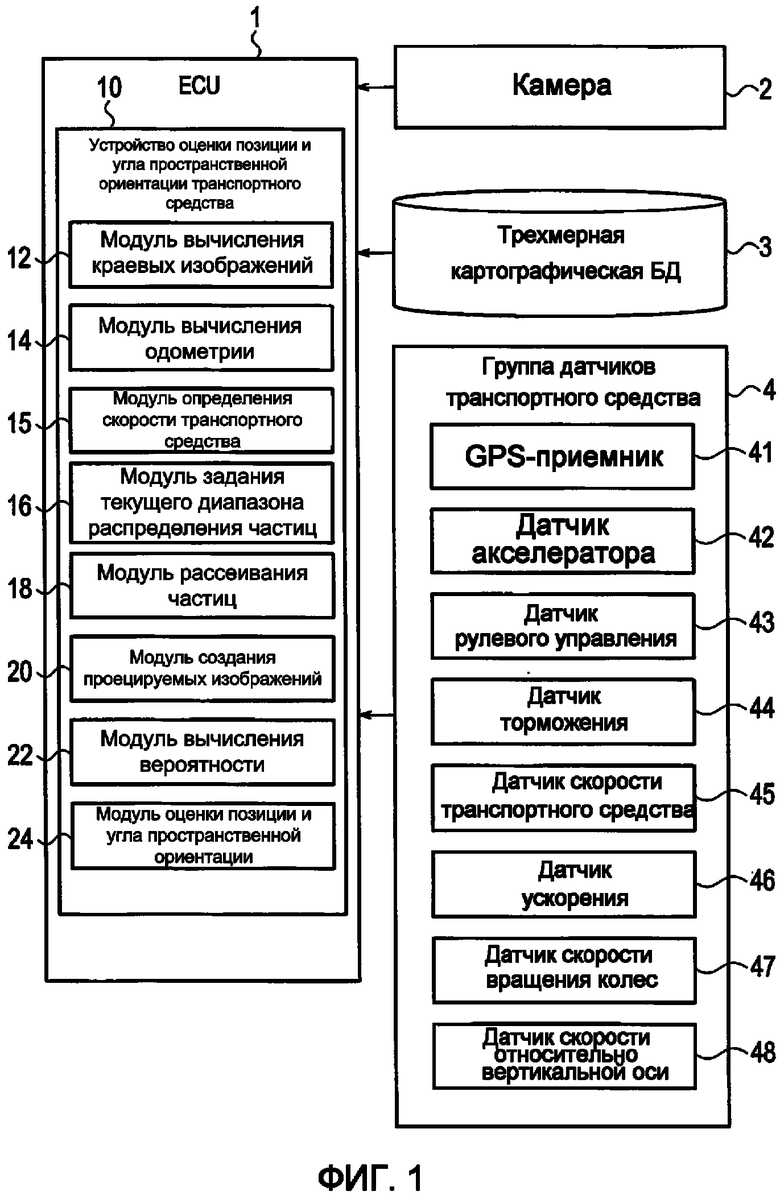
1. Устройство оценки позиции и угла пространственной ориентации транспортного средства, которое задает текущий диапазон распределения частиц как предварительно определенный диапазон посредством использования фильтра частиц и рассеивает частицы в заданном текущем диапазоне распределения, чтобы оценивать позицию и угол пространственной ориентации транспортного средства из изображения, захватывающего окрестности транспортного средства посредством камеры, смонтированной на транспортном средстве, которое имеет передние колеса и задние колеса, перемещается в направлении вперед-назад и выполняет поворот в направлении ширины транспортного средства, содержащее:
- модуль определения скорости транспортного средства, выполненный с возможностью определять скорость транспортного средства; и
- модуль задания текущего диапазона распределения частиц, выполненный с возможностью расширять текущий диапазон распределения в направлении ширины транспортного средства, когда скорость транспортного средства, определенная посредством модуля определения скорости транспортного средства, становится высокой.
2. Устройство оценки позиции и угла пространственной ориентации транспортного средства по п. 1, в котором модуль задания текущего диапазона распределения частиц расширяет текущий диапазон распределения в направлении угла рыскания, которое является направлением вращения относительно оси вдоль вертикального направления транспортного средства, когда скорость транспортного средства становится высокой.
3. Устройство оценки позиции и угла пространственной ориентации транспортного средства по п. 2, дополнительно содержащее модуль определения угловой скорости рыскания, выполненный с возможностью определять угловую скорость рыскания, которая представляет собой угловую скорость изменения транспортного средства в направлении угла рыскания, при этом модуль задания текущего диапазона распределения частиц расширяет текущий диапазон распределения в направлении угла рыскания, когда угловая скорость рыскания, определенная посредством модуля определения угловой скорости рыскания, становится высокой.
4. Устройство оценки позиции и угла пространственной ориентации транспортного средства по п. 3, в котором когда угловая скорость рыскания транспортного средства становится высокой, модуль задания текущего диапазона распределения частиц расширяет текущий диапазон распределения в направлении ширины транспортного средства после истечения предварительно определенного периода времени после расширения текущего диапазона распределения в направлении угла рыскания транспортного средства.
5. Устройство оценки позиции и угла пространственной ориентации транспортного средства по любому из пп. 1-4, дополнительно содержащее модуль определения угла рулевого управления, выполненный с возможностью определять угол рулевого управления транспортного средства, при этом модуль задания текущего диапазона распределения частиц расширяет текущий диапазон распределения в направлении ширины транспортного средства и в направлении угла рыскания транспортного средства, когда угол рулевого управления, определенный посредством модуля определения угла рулевого управления, становится большим.
6. Способ оценки позиции и угла пространственной ориентации транспортного средства для устройства оценки позиции и угла пространственной ориентации транспортного средства, которое задает текущий диапазон распределения частиц как предварительно определенный диапазон посредством использования фильтра частиц и рассеивает частицы в заданном текущем диапазоне распределения, чтобы оценивать позицию и угол пространственной ориентации транспортного средства из изображения, захватывающего окрестности транспортного средства посредством камеры, смонтированной на транспортном средстве, которое имеет передние колеса и задние колеса, перемещается в направлении вперед-назад и выполняет поворот в направлении ширины транспортного средства, содержащий этап, на котором побуждают устройство оценки позиции и угла пространственной ориентации транспортного средства:
- определять скорость транспортного средства; и
- расширять текущий диапазон распределения в направлении ширины транспортного средства, когда скорость транспортного средства становится высокой.
| JP 2011040993 A, 24.02.2011 | |||
| JP 2012108798 A, 07.06.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |

