Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу задания позиции остановки транспортного средства для задания позиции остановки транспортного средства.
Уровень техники
[0002] Известно устройство помощи при вождении, оснащенное в транспортном средстве, которое вычисляет целевой намеченный путь с учетом риска контакта между рассматриваемым транспортным средством и помехами рядом с рассматриваемым транспортным средством (патентный документ 1). В устройстве помощи при вождении, описанном в патентном документе 1, вычисляется риск контакта между рассматриваемым транспортным средством и помехами рядом с рассматриваемым транспортным средством, когда рассматриваемое транспортное средство управляется с возможностью останавливаться на перекрестке.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2011-96105A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в устройстве помощи при вождении, описанном в патентном документе 1, не учитывается ориентация рассматриваемого транспортного средства, управляемого с возможностью останавливаться на целевом намеченном пути, и рассматриваемое транспортное средство, возможно, может останавливаться в несоответствующей ориентации, которая не соответствует ситуации на целевом намеченном пути.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство и способ задания позиции остановки транспортного средства, которые позволяют обеспечивать возможность рассматриваемому транспортному средству останавливаться в ориентации, которая соответствует ситуации на целевом намеченном пути.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством задания целевой позиции остановки транспортного средства для рассматриваемого транспортного средства как находящуюся в ориентации транспортного средства, которая соответствует конкретной ситуации, вычисления целевого намеченного пути для рассматриваемого транспортного средства, обнаружения позиции остановки транспортного средства в конкретной ситуации, присутствующей на целевом намеченном пути, и управления рассматриваемым транспортным средством с возможностью останавливаться в позиции остановки транспортного средства в конкретной ситуации.
Преимущества изобретения
[0007] Согласно настоящему изобретению, целевая позиция остановки транспортного средства для рассматриваемого транспортного средства задается с учетом ориентации рассматриваемого транспортного средства, и получается такое преимущество, что рассматриваемое транспортное средство может управляться с возможностью останавливаться в ориентации, которая соответствует ситуации на целевом намеченном пути.
Краткое описание чертежей
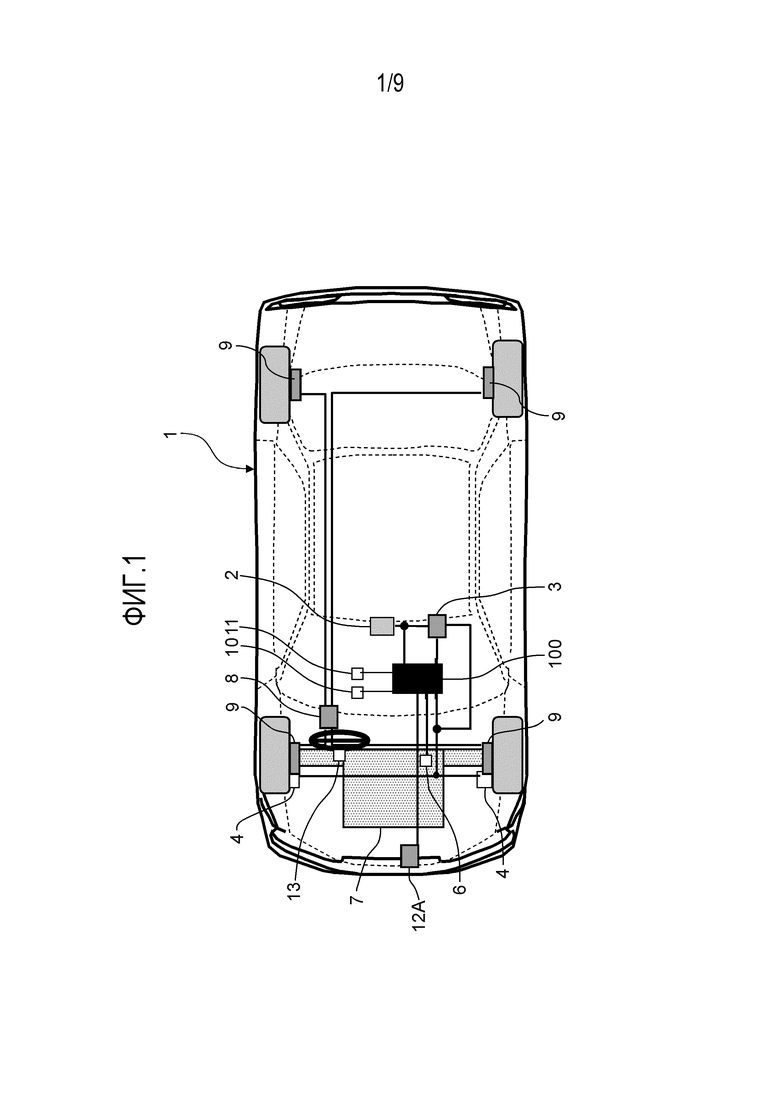
[0008] Фиг. 1 является видом, иллюстрирующим аппаратную конфигурацию транспортного средства, к которому применяются устройство и способ задания позиции остановки транспортного средства согласно первому варианту осуществления настоящего изобретения.
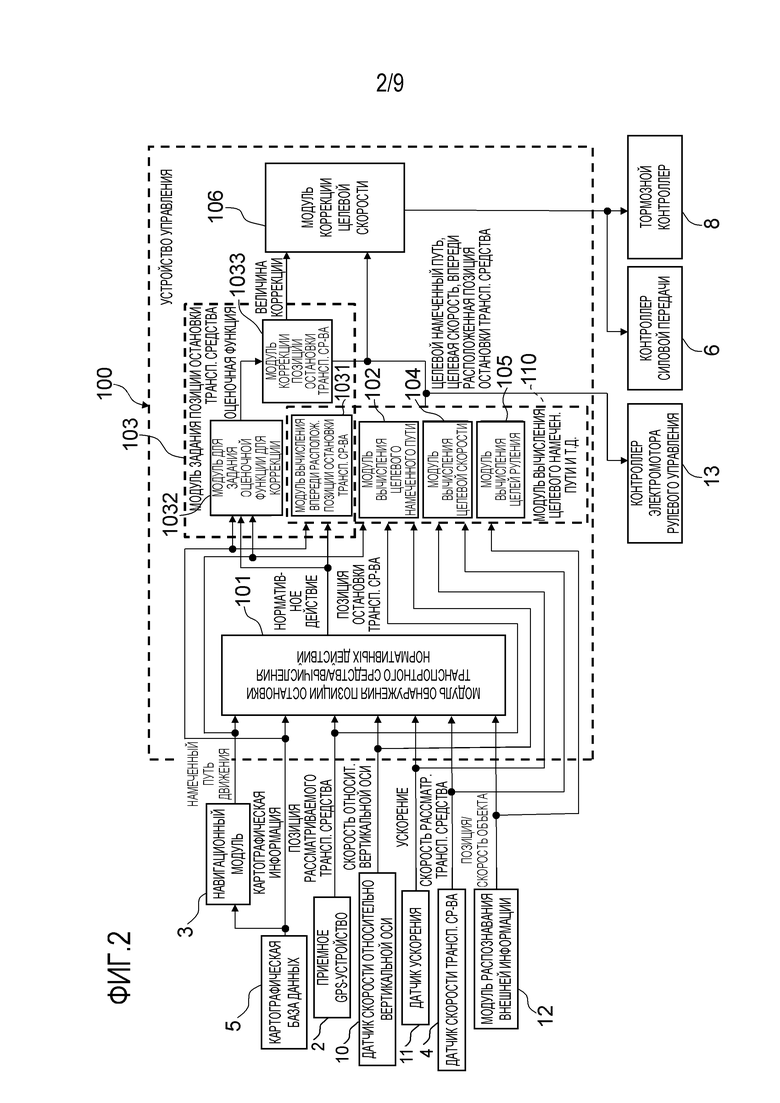
Фиг. 2 является функциональной блок-схемой устройства управления по фиг. 1.
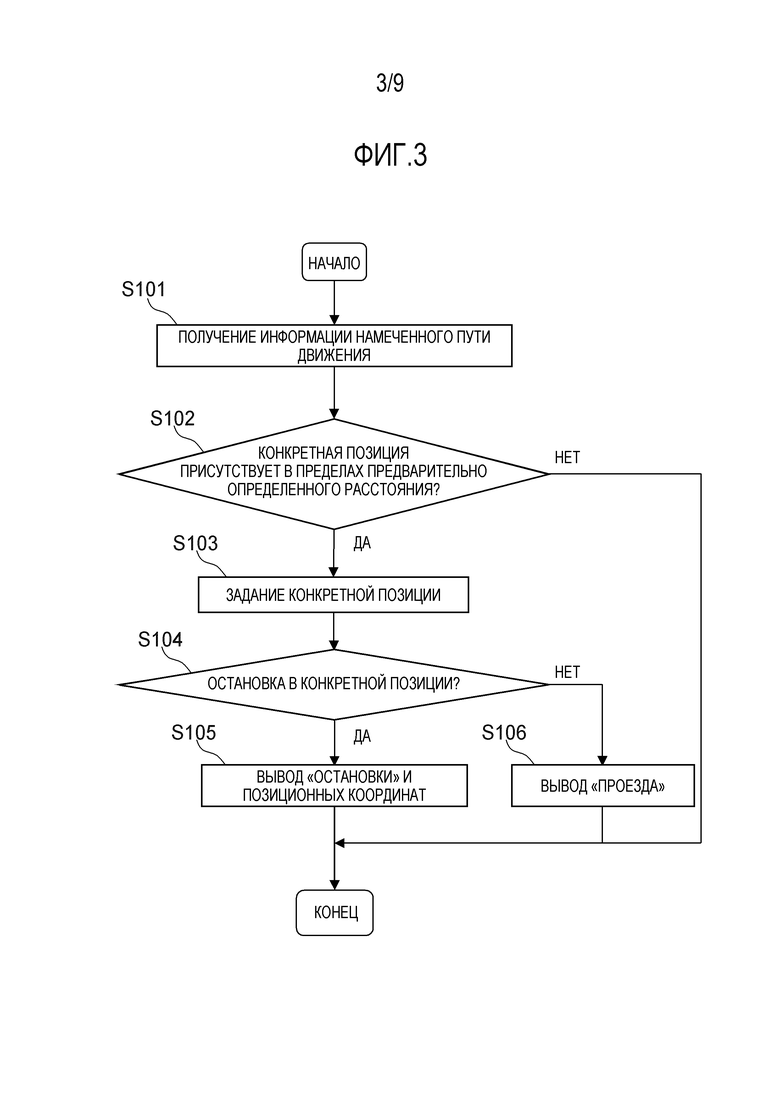
Фиг. 3 является блок-схемой последовательности операций способа для описания процесса, выполняемого посредством модуля обнаружения позиции остановки транспортного средства/вычисления нормативных действий по фиг. 2.
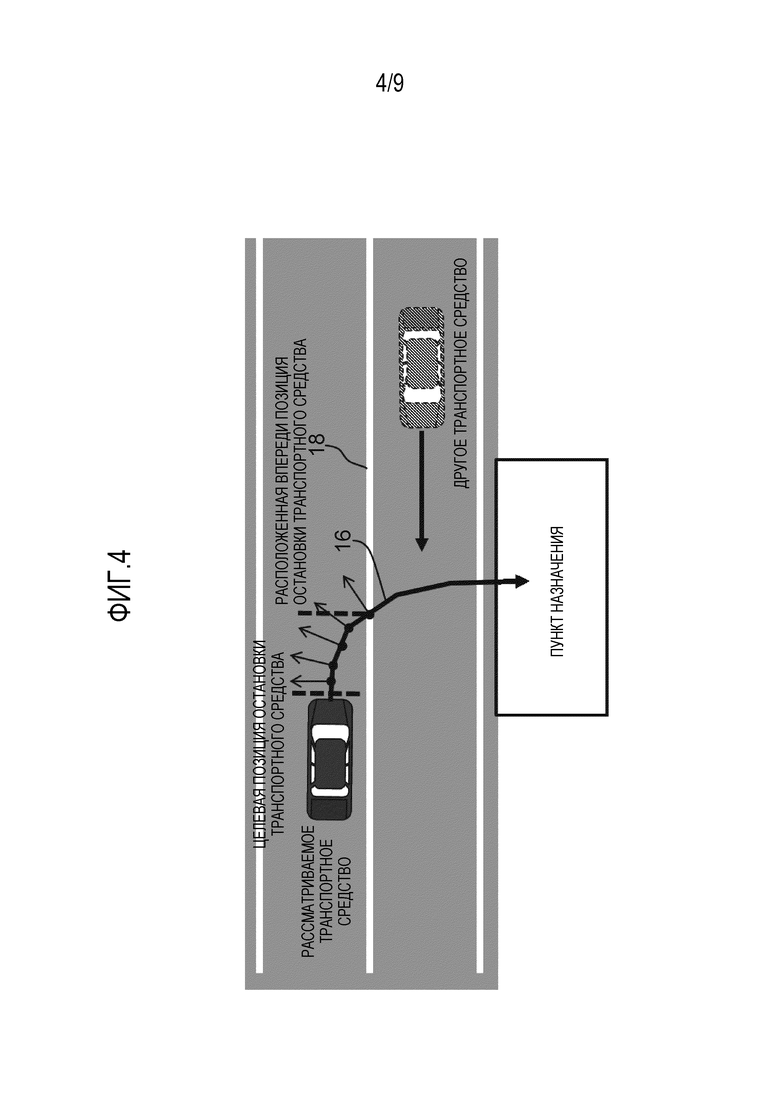
Фиг. 4 является видом сверху, иллюстрирующим ситуацию, в которой транспортное средство по фиг. 1 переезжает через встречную полосу движения, смежную с полосой движения рассматриваемого транспортного средства, чтобы продолжать движение к пункту назначения.
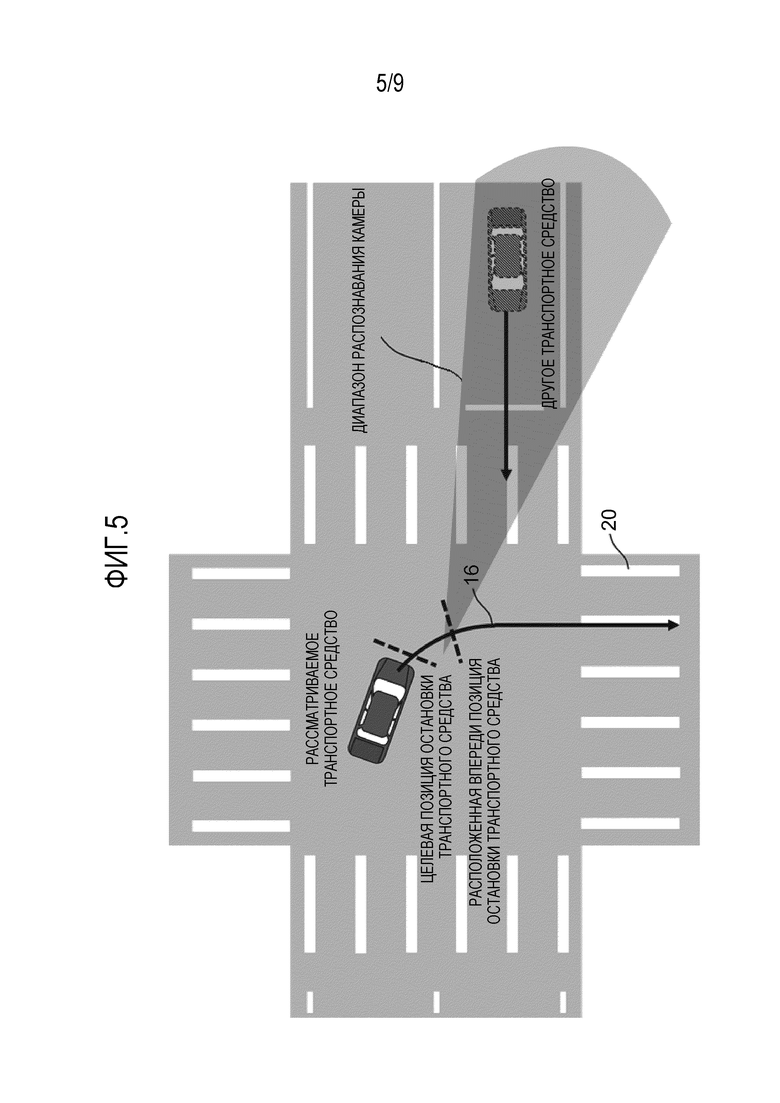
Фиг. 5 является видом сверху, иллюстрирующим ситуацию, в которой транспортное средство по фиг. 1 останавливается перед поворотом направо на перекрестке.
Фиг. 6 является видом сверху, иллюстрирующим ситуацию, в которой транспортное средство по фиг. 1 останавливается в позиции, в которой присутствует стоп-линия.
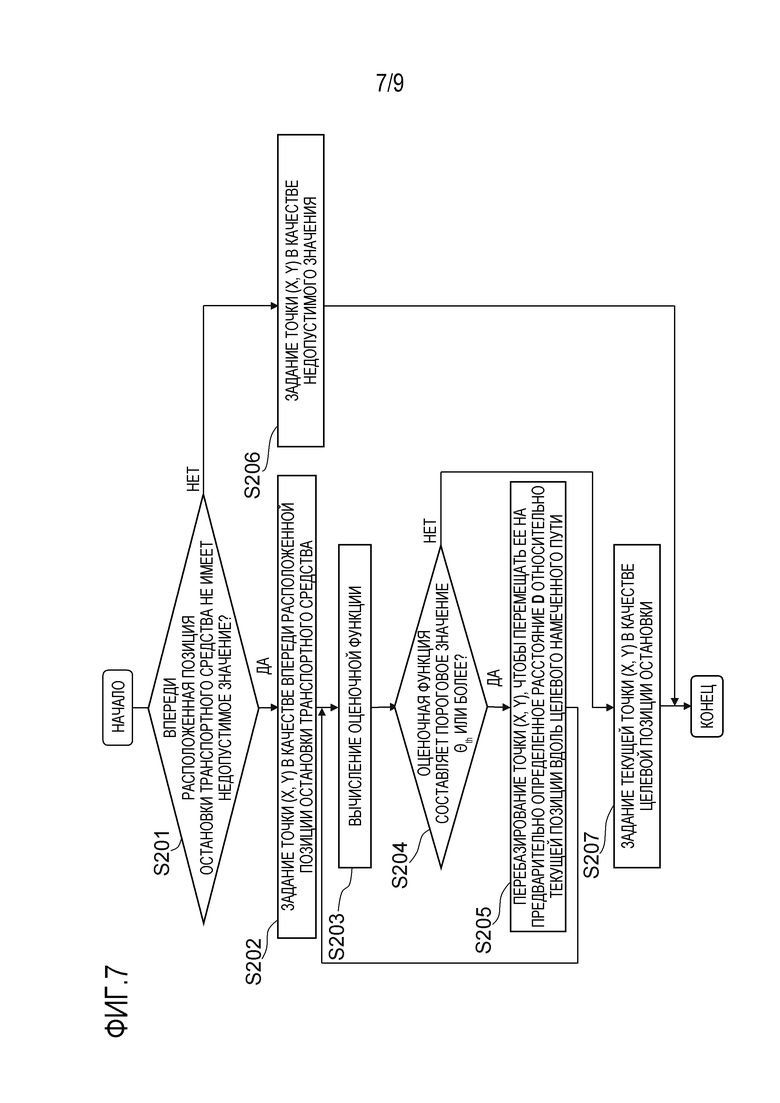
Фиг. 7 является блок-схемой последовательности операций способа для описания процесса коррекции позиции остановки транспортного средства, выполняемого в модуле задания позиции остановки транспортного средства по фиг. 2.
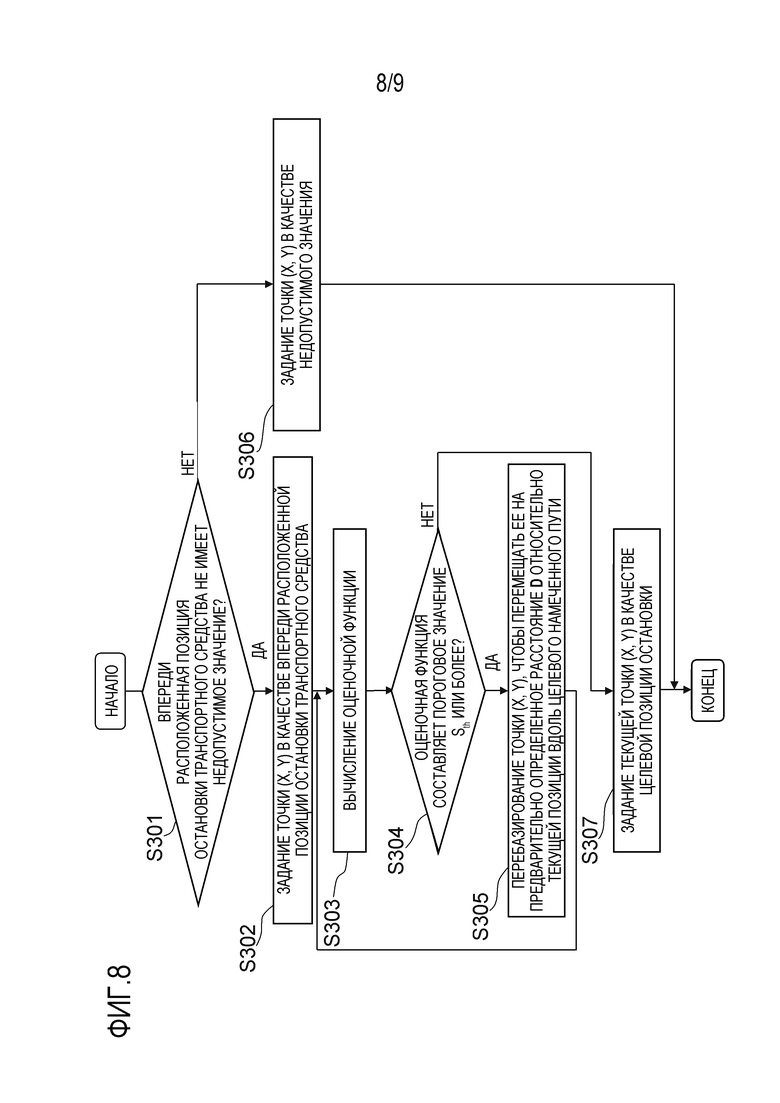
Фиг. 8 является блок-схемой последовательности операций способа для описания другого примера процесса коррекции позиции остановки транспортного средства, выполняемого в модуле задания позиции остановки транспортного средства по фиг. 2.
Фиг. 9 является функциональной блок-схемой устройства управления согласно второму варианту осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. Устройство задания позиции остановки транспортного средства для транспортного средства согласно нижеприведенным вариантам осуществления связано с устройством управления движением транспортного средства, которое предоставляет автоматизированное вождение или помощь при вождении для транспортного средства в соответствии с целевым намеченным путем, вычисленным посредством ввода от водителя. В частности, это устройство управляет позицией остановки транспортного средства для транспортного средства. Автоматизированное вождение или помощь при вождении для транспортного средства согласно одному или более вариантов осуществления настоящего изобретения заключается в том, чтобы начинать управление посредством ввода от водителя и обеспечивать возможность транспортному средству двигаться в соответствии с целевым намеченным путем без водительской операции по нажатию педали акселератора, операции торможения и операции руления. Тем не менее, следует отметить, что если водитель выполнит операцию нажатия педали акселератора, операцию торможения или операцию руления, управление автоматизированным вождением или управление помощью при вождении приостанавливается, чтобы приоритезировать операцию водителя.
Первый вариант осуществления
Фиг. 1 является видом сверху, иллюстрирующим аппаратную конфигурацию транспортного средства 1, к которому применяется устройство задания позиции остановки транспортного средства согласно первому варианту осуществления настоящего изобретения. Как проиллюстрировано на чертеже, транспортное средство 1 содержит приемное устройство 2 на основе глобальной системы позиционирования (GPS), навигационный модуль 3, один или более датчиков 4 скорости транспортного средства, устройство 100 управления, контроллер 6 силовой цепи, двигатель/приводную систему 7, тормозной контроллер 8, один или более тормозных блоков 9, датчик 10 скорости относительно вертикальной оси, датчик 11 ускорения, камеру 12A и контроллер 13 электромотора рулевого управления.
[0010] Приемное GPS-устройство 2 принимает GPS-сигналы, связанные с абсолютными позиционными координатами (широтой/долготой) рассматриваемого транспортного средства, и передает принимаемые сигналы в навигационный модуль 3 и устройство 100 управления. Навигационный модуль 3 содержит картографическую базу 5 данных (см. фиг. 2), устройство обработки информации и устройство отображения. Картографическая база 5 данных сохраняет информацию относительно форм и уклонов дорог в дополнение к картографической информации. Когда пассажир задает пункт назначения через навигационный модуль 3, устройство обработки информации задает намеченный путь движения от текущей позиции до пункта назначения и управляет устройством отображения с возможностью отображать намеченный путь движения. Устройство обработки информации передает информацию намеченного пути движения в устройство 100 управления.
[0011] Датчик 4 скорости транспортного средства измеряет скорость транспортного средства для рассматриваемого транспортного средства и передает измерительный сигнал в устройство 100 управления. Доступные примеры датчика 4 скорости транспортного средства включают в себя кодовый датчик угла поворота и т.п., присоединяемый к колесу. Кодовый датчик угла поворота измеряет скорость транспортного средства на основе импульсных сигналов, вычисленных пропорционально скорости вращения колеса.
[0012] Устройство 100 управления, которое может представлять собой интегральную схему, такую как микропроцессор, содержит схему аналого-цифрового преобразователя, схему цифро-аналогового преобразователя, центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и другие необходимые компоненты. Устройство 100 управления обрабатывает информацию, вводимую из датчиков, таких как датчик нажатия педали акселератора и датчик нажатия педали тормоза, с использованием программы, сохраненной в ROM, чтобы вычислять целевую скорость транспортного средства, и передает необходимую движущую силу для целевой скорости транспортного средства в контроллер 6 силовой цепи и необходимую тормозную силу для целевой скорости транспортного средства в тормозной контроллер 8. Устройство 100 управления также обрабатывает информацию угла поворота при рулении, которая вводится из датчика угла поворота при рулении, с использованием программы, сохраненной в ROM, чтобы вычислять целевой угол поворота при рулении, и передает величину руления для целевого угла поворота при рулении в контроллер 13 электромотора рулевого управления.
[0013] Контроллер 6 силовой цепи управляет двигателем/приводной системой 7 таким образом, чтобы достигать необходимой движущей силы, передаваемой из устройства 100 управления. Транспортное средство примерно иллюстрируется как имеющее только двигатель (двигатель внутреннего сгорания) в качестве источника приведения в движение для обеспечения движения, но настоящее изобретение также может применяться к электромобилю (включающему в себя автомобиль на топливных элементах), имеющему электромотору в качестве источника приведения в движение для обеспечения движения, гибридному автомобилю, имеющему комбинацию двигателя и электромотора в качестве источника приведения в движение для обеспечения движения, и к другим транспортным средствам.
[0014] Тормозной контроллер 8 управляет тормозным блоком 9, который предоставляется в колесе, таким образом, чтобы достигать необходимой тормозной силы, передаваемой из устройства 100 управления. Контроллер 13 электромотора рулевого управления управляет электромотором рулевого управления (не проиллюстрирован) механизма рулевого управления таким образом, чтобы достигать целевого угла поворота при рулении, передаваемого из устройства 100 управления. Электромотор рулевого управления представляет собой актуатор рулевого управления, присоединяемый к валу рулевой колонки системы рулевого управления.
[0015] Датчик 10 скорости относительно вертикальной оси измеряет скорость относительно вертикальной оси рассматриваемого транспортного средства и выводит измерительный сигнал в устройство 100 управления. Датчик 11 ускорения измеряет ускорение рассматриваемого транспортного средства и передает измерительный сигнал в устройство 100 управления.
[0016] Камера 12A представляет собой, например, устройство формирования изображений, содержащее элемент формирования изображений, такой как CCD. Камера 12A располагается в передней части рассматриваемого транспортного средства и захватывает изображения впереди рассматриваемого транспортного средства, чтобы получать данные изображений. Модуль 12 распознавания внешней информации (см. фиг. 2), который описывается ниже, выполняет обработку изображений для данных изображений, полученных из камеры 12A, чтобы вычислять позиции других транспортных средств и объектов, таких как бордюрные камни, расположенные впереди рассматриваемого транспортного средства, и скорости движущихся объектов, таких как другие транспортные средства, и выводит вычисленные результаты в устройство 100 управления.
[0017] Фиг. 2 является функциональной блок-схемой устройства 100 управления. Как проиллюстрировано на чертеже, устройство 100 управления содержит модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, модуль 102 вычисления целевого намеченного пути, модуль 103 задания позиции остановки транспортного средства, модуль 104 вычисления целевой скорости, модуль 105 вычисления целей руления и модуль 106 коррекции целевой скорости. Модуль 103 задания позиции остановки транспортного средства содержит модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства, модуль 1032 для задания оценочной функции для коррекции и модуль 1033 коррекции позиции остановки транспортного средства. Здесь, функциональный блок, который включает в себя модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства, модуль 102 вычисления целевого намеченного пути, модуль 104 вычисления целевой скорости и модуль 105 вычисления целей руления, упоминается как модуль 110 вычисления целевого намеченного пути и т.п.
[0018] Модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, модуль 1032 для задания оценочной функции для коррекции и модуль 110 вычисления целевого намеченного пути и т.п. принимают информацию намеченного пути движения из навигационного модуля 3 и картографическую информацию из картографической базы 5 данных. Модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий и модуль 110 вычисления целевого намеченного пути и т.п. принимают информацию абсолютной позиции рассматриваемого транспортного средства из приемного GPS-устройства 2, информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 4 скорости транспортного средства, информацию скорости относительно вертикальной оси рассматриваемого транспортного средства из датчика 10 скорости относительно вертикальной оси, информацию ускорения рассматриваемого транспортного средства из датчика 11 ускорения и информацию относительно позиций и скоростей объектов, таких как другие транспортные средства, движущиеся впереди рассматриваемого транспортного средства, и другую обязательную информацию из модуля 12 распознавания внешней информации.
[0019] Модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий определяет то, следует или нет управлять рассматриваемым транспортным средством, которое движется в соответствии с намеченным путем движения, заданным посредством навигационного модуля 3, с возможностью останавливаться в определенной/конкретной позиции, и выводит результат определения остановки или проезда в качестве нормативного действия в модуль 110 вычисления целевого намеченного пути и т.п. и модуль 1032 для задания оценочной функции для коррекции. Здесь, примеры определенной/конкретной позиции включают в себя следующие точки [1]-[3]:
[1] такую точку, как стоп-линия, в которой остановка является обязательной согласно требованию закона о дорожном движении;
[2] точку, в которой рассматриваемое транспортное средство и другое транспортное средство могут создавать помехи друг для друга, поскольку целевой намеченный путь для рассматриваемого транспортного средства пересекается с другой полосой движения (например, позицию остановки транспортного средства, когда рассматриваемое транспортное средство переезжает через встречную полосу движения, или позицию остановки транспортного средства, когда рассматриваемое транспортное средство поворачивает направо на перекрестке); и
[3] такую точку, как пешеходный переход, на котором рассматриваемое транспортное средство и пешеход могут создавать помехи друг для друга.
[0020] Фиг. 3 является блок-схемой последовательности операций способа для описания процесса, выполняемого посредством модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий. Во-первых, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий обращается к картографической базе 5 данных, чтобы получать информацию относительно намеченного пути движения от рассматриваемого транспортного средства на предварительно определенное расстояние (этап S101). Здесь, предварительно определенное расстояние, которое должно задаваться, может составлять расстояние приблизительно в несколько сотен метров. В альтернативном варианте осуществления, предварительно определенное расстояние может быть переменным таким образом, что оно становится больше по мере того, как увеличивается скорость рассматриваемого транспортного средства.
[0021] Затем модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий определяет то, присутствует или нет вышеуказанная определенная/конкретная позиция в пределах диапазона вышеуказанного предварительно определенного расстояния от рассматриваемого транспортного средства, на основе информации, полученной из картографической базы 5 данных (этап S102). Когда выполняется положительное определение, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий задает определенную/конкретную позицию, которая является ближайшей к рассматриваемому транспортному средству, в качестве вышеуказанной определенной/конкретной позиции (этап S103). Когда выполняется отрицательное определение, процесс завершается, и управление движением выполняется в соответствии с заданным управлением автоматизированным вождением или управлением помощью при вождении.
[0022] Затем модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий определяет то, следует или нет управлять рассматриваемым транспортным средством с возможностью останавливаться в определенной/конкретной позиции, которая задается на этапе S103 (этап S104). На этом этапе, когда стоп-линия присутствует в определенной/конкретной позиции, как и в случае вышеуказанной точки [1], положительное определение всегда выполняется, тогда как, когда стоп-линия не присутствует, но создающий помехи объект, такой как другое транспортное средство и пешеход, присутствует, как в случаях вышеуказанных точек [2] и [3], определение выполняется следующим образом.
[0023] В случае вышеуказанной точки [2], модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий сравнивает время для рассматриваемого транспортного средства, чтобы прибывать в точку, в которой могут возникать помехи, и время для другого транспортного средства, чтобы прибывать в эту точку. Для этого сравнения, информация, вводимая из модуля 12 распознавания внешней информации, используется для того, чтобы получать позицию и скорость другого транспортного средства. Когда, в результате сравнения, разность между временами поступления составляет пороговое значение или меньше, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий выполняет положительное определение. Здесь, пороговое значение может задаваться равным такой длине, что пассажиры рассматриваемого транспортного средства и другого транспортного средства не ощущают себя в меньшей безопасности.
[0024] В случае вышеуказанной точки [3], модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий выполняет положительное определение, когда модуль 12 распознавания внешней информации распознает пешехода и т.п., который пересекает намеченный путь движения для рассматриваемого транспортного средства.
[0025] При выполнении положительного определения на этапе S104, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий выводит нормативное действие "остановки транспортного средства" и координаты в картографических данных определенной/конкретной позиции, заданных на этапе S103, в модуль 110 вычисления целевого намеченного пути и т.п. и модуль 1032 для задания оценочной функции для коррекции (этап S105). При выполнении отрицательного определения на этапе S104, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий выводит нормативное действие "проезд" в модуль 110 вычисления целевого намеченного пути и т.п. и модуль 1032 для задания оценочной функции для коррекции (этап S106).
[0026] Таким образом, модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий имеет функцию обнаружения позиции остановки транспортного средства в определенной/конкретной ситуации на целевом намеченном пути, вычисленном посредством модуля 102 вычисления целевого намеченного пути, и вывода позиции остановки транспортного средства в модуль 102 вычисления целевого намеченного пути и модуль 1032 для задания оценочной функции для коррекции.
[0027] Модуль 102 вычисления целевого намеченного пути, проиллюстрированный на фиг. 2, вычисляет целевой намеченный путь, который проходит через намеченный путь движения, заданный посредством навигационного модуля 3. Вычисление целевого намеченного пути может выполняться с использованием известного способа, например, через анализ в качестве задачи оптимизации. Например, оценочная функция может задаваться так, как представлено посредством нижеприведенного выражения (1).
Математическое выражение 1
 (1)
(1)
[0028] Здесь, в подынтегральном выражении в правой части вышеприведенного выражения (1), первый член Wuu(s)2 является штрафной функцией для темпа изменения кривизны, u, намеченного пути в качестве ввода, и второй член Wkk(s)2 является штрафной функцией для кривизны, k, намеченного пути в качестве ввода. L представляет длину намеченного пути и может задаваться, например, равным достаточно большой длине, к примеру, длине, которая обеспечивает возможность рассматриваемому транспортному средству двигаться в течение нескольких секунд с текущей скоростью.
[0029] Намеченный путь может получаться посредством решения и интегрирования выражения (2), которое удовлетворяет уравнению состояния выражения (3) и функции выражения (4).
Математическое выражение 2
 (2)
(2)
 (3)
(3)
 (4)
(4)
[0030] Здесь, X представляет вектор состояния и составляется как X=(x y θ k)T, где соответствующие элементы являются координатами (X, Y) на намеченном пути, углом θ направления движения и кривизной k. В вышеприведенном выражении (4), P(X(s)) является функцией, которая представляет расстояние между границей, заданной посредством сигнальной линии дорожной разметки, бордюрным камнем и т.п., и намеченным путем. Эта функция задается для такого ограничивающего условия, что намеченный путь не должен выходить за пределы границы.
[0031] Модуль 105 вычисления целей руления вычисляет цель руления для рассматриваемого транспортного средства, чтобы придерживаться целевого намеченного пути, вычисленного посредством модуля 102 вычисления целевого намеченного пути, и выводит цель руления в контроллер 13 электромотора рулевого управления. Здесь, вычисление цели руления может выполняться, например, с использованием известного способа, такого как способ с использованием модели направления взгляда в области переднего обзора и т.п. Модель направления взгляда в области переднего обзора означает модель, в которой предполагается, что рабочая величина, задаваемая водителем, является пропорциональной отклонению от направления взгляда в области переднего обзора или отклонению от целевого курса в точке контакта на основе отслеживания направления взгляда в области переднего обзора. Когда используется такая модель, может вычисляться целевое значение, которое предоставляет управление, чтобы обеспечивать схождение отклонения от направления взгляда в области переднего обзора к нулю (м).
[0032] Модуль 104 вычисления целевой скорости задает целевую скорость Vr для движения рассматриваемого транспортного средства на целевом намеченном пути, вычисленном посредством модуля 102 вычисления целевого намеченного пути. Например, целевая скорость Vr может задаваться на основе нижеприведенного выражения (5) таким образом, что поперечное ускорение и скорость относительно вертикальной оси рассматриваемого транспортного средства не выше соответствующих пороговых значений в каждой точке на целевом намеченном пути.
Математическое выражение 3
 (5)
(5)
[0033] Здесь, R представляет радиус кривизны в каждой точке на целевом намеченном пути, aymax представляет ускорение, и ωmax представляет угловую скорость. В варианте осуществления, форма сигнала целевой скорости Vr может сглаживаться посредством использования модуля ограничения градиента, фильтра с конечной импульсной характеристикой (FIR) и/или другого соответствующего средства для целевой скорости Vr, полученной в соответствии с вышеприведенным выражением (5).
[0034] Модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает координаты в картографических данных вышеуказанной определенной/конкретной позиции (т.е. позицию остановки транспортного средства в определенной/конкретной ситуации), которые выводятся из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, вместе с "остановкой" в качестве нормативного действия, в качестве координат впереди расположенной позиции остановки транспортного средства. С другой стороны, когда "проезд" выводится в качестве нормативного действия из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает недопустимое значение для впереди расположенной позиции остановки транспортного средства.
[0035] Как проиллюстрировано на фиг. 4, когда рассматриваемое транспортное средство переезжает через встречную полосу движения, смежную с полосой движения рассматриваемого транспортного средства, чтобы продолжать движение к пункту назначения, впереди расположенная позиция остановки транспортного средства задается равной точке пересечения целевого намеченного пути 16 с граничной линией 18 между полосой движения рассматриваемого транспортного средства и встречной полосой движения. Когда рассматриваемое транспортное средство поворачивает направо на перекрестке, как проиллюстрировано на фиг. 5, впереди расположенная позиция остановки транспортного средства задается на задней стороне в направлении движения (ближней стороне при просмотре из рассматриваемого транспортного средства) относительно пешеходного перехода 20 на целевом намеченном пути 16. Когда существует стоп-линия 22, как проиллюстрировано на фиг. 6, впереди расположенная позиция остановки транспортного средства задается равной позиции стоп-линии 22.
[0036] Модуль 1032 для задания оценочной функции для коррекции задает оценочную функцию для коррекции вышеуказанной впереди расположенной позиции остановки транспортного средства на целевую позицию остановки транспортного средства. Оценочная функция задается в соответствии с ситуацией вышеуказанной определенной/конкретной позиции, в которой должно останавливаться рассматриваемое транспортное средство. Например, как проиллюстрировано на фиг. 4, когда рассматриваемое транспортное средство переезжает через встречную полосу движения, смежную с полосой движения рассматриваемого транспортного средства, чтобы продолжать движение к пункту назначения, оценочная функция задается следующим образом.
[0037] В таком случае, чтобы снижать риск помех между рассматриваемым транспортным средством и другим транспортным средством, движущимся во встречной полосе движения, оценочная функция задается таким образом, что рассматриваемое транспортное средство останавливается в ориентации, параллельной полосе движения рассматриваемого транспортного средства. Например, оценочная функция может задаваться так, как представлено посредством нижеприведенного выражения (6).
Математическое выражение 4
 (6)
(6)
[0038] Здесь, θT(x, y) представляет направление вектора нормали в точке (x, y) на целевом намеченном пути, и θl(x, y) представляет направление вектора нормали в точке на граничной линии 18, в которой расстояние от вышеуказанной точки (x, y) является минимальным. Таким образом, по мере того, как значение вышеприведенного выражения (6) становится меньше, параллелизм между рассматриваемым транспортным средством и граничной линией 18 становится более высоким, и значение оценки оценочной функции также становится более высоким. Значение оценки оценочной функции настоящего варианта осуществления задается равным большему значению по мере того, как ориентация транспортного средства более соответствует ситуации остановки транспортного средства. В этом случае, можно сказать, что ориентация транспортного средства в большей степени соответствует ситуации остановки транспортного средства по мере того, как параллелизм между рассматриваемым транспортным средством и граничной линией 18 становится более высоким. Более высокий параллелизм, следовательно, обеспечивает более высокое значение оценки. В альтернативном варианте осуществления, направления векторов θT(x, y) и θl(x, y) нормали могут подставляться посредством направлений векторов касательной, полученных посредством вращения векторов нормали на 90°.
[0039] Модуль 1033 коррекции позиции остановки транспортного средства корректирует впереди расположенную позицию остановки транспортного средства на целевую позицию остановки транспортного средства, которая расположена сзади относительно впереди расположенной позиции остановки транспортного средства, на основе оценочной функции, заданной посредством модуля 1032 для задания оценочной функции для коррекции.
[0040] Фиг. 7 является блок-схемой последовательности операций способа для описания процесса коррекции позиции остановки транспортного средства. Во-первых, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства определяет то, имеет или нет впереди расположенная позиция остановки транспортного средства, введенная из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, недопустимое значение (этап S201). На этом этапе, отрицательное определение выполняется, когда "проезд" выводится в качестве нормативного действия из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий. С другой стороны, положительное определение выполняется, когда "остановка" выводится в качестве нормативного действия из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, и координаты в картографических данных вышеуказанной определенной/конкретной позиции задаются равными координатам впереди расположенной позиции остановки транспортного средства посредством модуля 1031 вычисления впереди расположенной позиции остановки транспортного средства.
[0041] Когда положительное определение выполняется на этапе S201, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает впереди расположенную позицию остановки транспортного средства в качестве начального значения в точке (x, y), в которой рассматриваемое транспортное средство должно останавливаться (этап S202). Затем модуль 1033 коррекции позиции остановки транспортного средства вычисляет оцененное значение оценочной функции вышеприведенного выражения (6) (этап S203).
[0042] Затем модуль 1033 коррекции позиции остановки транспортного средства определяет то, составляет значение оценки, вычисленное на этапе S203, пороговое значение θth или выше либо нет (этап S204). После этого, когда положительное определение выполняется на этапе S204, модуль 1033 коррекции позиции остановки транспортного средства перебазирует точку (x, y), чтобы перемещать ее на предварительно определенное расстояние D (например, 1 м) назад относительно текущей позиции вдоль целевого намеченного пути (этап S205). Здесь, предварительно определенное расстояние D может задаваться небольшим в максимально возможной степени с учетом точности приемного GPS-устройства 2 и картографических данных и нагрузки по обработке вычисления.
[0043] Вышеуказанные этапы S203-S205 многократно выполняются до тех пор, пока отрицательное определение не будет выполнено на этапе S204, т.е. до тех пор, пока значение оценки вышеприведенного выражения (6) не станет равным пороговому значению θth или ниже. Здесь, пороговое значение θth задается таким образом, что параллелизм между векторами θT(x, y) и θl(x, y) нормали является достаточно высоким.
[0044] Когда отрицательное определение выполняется на этапе S204, модуль 1033 коррекции позиции остановки транспортного средства задает скорректированную точку (x, y) в качестве целевой позиции остановки транспортного средства (этап S207). Процесс коррекции позиции остановки транспортного средства в силу этого завершается.
[0045] Когда отрицательное определение выполняется на этапе S201, т.е. когда впереди расположенная позиция остановки транспортного средства, вводимая из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, имеет недопустимое значение (нормативное действие "проезд", заданное на этапе S106 по фиг. 3), модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает позицию (x, y) остановки транспортного средства в качестве недопустимого значения (этап S206). Процесс коррекции позиции остановки транспортного средства в силу этого завершается.
[0046] Модуль 106 коррекции целевой скорости корректирует целевую скорость Vr таким образом, что рассматриваемое транспортное средство может останавливаться в целевой позиции остановки транспортного средства, полученной посредством коррекции посредством модуля 1033 коррекции позиции остановки транспортного средства. Во-первых, модуль 106 коррекции целевой скорости создает профиль таким образом, что целевая скорость становится нулевой (м/с) в целевой позиции остановки транспортного средства, когда рассматриваемое транспортное средство замедляется с определенным/конкретным замедлением ag (м/с2). Затем модуль 106 коррекции целевой скорости сравнивает целевую скорость, вычисленную посредством модуля вычисления целевой скорости 104, и целевую скорость вышеуказанного профиля, чтобы задавать более низкую из них в качестве целевой скорости Vr. Это обеспечивает возможность скорректированной целевой скорости рассматриваемого транспортного средства быть нулевой (м/с) в целевой позиции остановки транспортного средства.
[0047] Модуль 106 коррекции целевой скорости передает скорректированную целевую скорость в контроллер 6 силовой цепи и тормозной контроллер 8.
[0048] Дальнейшее описание направлено на процесс коррекции позиции остановки транспортного средства при остановке перед поворотом направо на перекрестке, как проиллюстрировано на фиг. 5.
[0049] В таком окружении, когда рассматриваемое транспортное средство управляется с возможностью останавливаться на перекрестке до тех пор, пока другое транспортное средство во встречной полосе движения не проедет через перекресток, требуется для модуля 12 распознавания внешней информации, чтобы в достаточной степени распознавать информацию относительно встречной полосы движения. Оценочная функция в силу этого задается так, как представлено посредством нижеприведенного выражения (7) таким образом, что значение оценки является более высоким по мере того, как диапазон встречной полосы движения, включенный в диапазон распознавания камеры 12A, становится более широким.
Математическое выражение 5
 (7)
(7)
[0050] Здесь, Sall представляет площадь области встречной полосы движения, которую должна распознавать камера 12A, и получается посредством умножения ширины встречной полосы движения и расстояния для встречной полосы движения, требуемого для распознавания. Расстояние для встречной полосы движения, требуемое для распознавания, может задаваться, например, в качестве расстояния, которое обеспечивает возможность движения в течение нескольких секунд с ограничением скорости.
[0051] S0(x, y) представляет площадь, в которой площадь Sall перекрывает диапазон распознавания камеры 12A в точке (x, y), в которой рассматриваемое транспортное средство предположительно должно останавливаться. Площадь S0(x, y) может получаться посредством выполнения преобразования координат области распознавания камеры 12A с использованием вектора касательной в точке, которая имеет кратчайшее расстояние от вышеуказанной точки (x, y) на целевом намеченном пути, и геометрического получения области, в которой область распознавания после того, как преобразование координат перекрывает область обязательного распознавания (площадь Sall) в картографических данных.
[0052] Модуль 1033 коррекции позиции остановки транспортного средства корректирует впереди расположенную позицию остановки транспортного средства на целевую позицию остановки транспортного средства на основе оценочной функции, заданной посредством модуля 1032 для задания оценочной функции для коррекции.
[0053] Фиг. 8 является блок-схемой последовательности операций способа для описания процесса коррекции позиции остановки транспортного средства. Во-первых, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства определяет то, имеет или нет впереди расположенная позиция транспортного средства, введенная из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, недопустимое значение (этап S301). На этом этапе, отрицательное определение выполняется, когда "проезд" выводится в качестве нормативного действия из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий. С другой стороны, положительное определение выполняется, когда "остановка" выводится в качестве нормативного действия из модуля 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий, и координаты в картографических данных вышеуказанной определенной/конкретной позиции задаются равными координатам впереди расположенной позиции остановки транспортного средства посредством модуля 1031 вычисления впереди расположенной позиции остановки транспортного средства.
[0054] Когда положительное определение выполняется на этапе S301, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает впереди расположенную позицию остановки транспортного средства в качестве начального значения в точке (x, y), в которой рассматриваемое транспортное средство должно останавливаться (этап S302). Затем модуль 1033 коррекции позиции остановки транспортного средства вычисляет оцененное значение оценочной функции вышеприведенного выражения (7) (этап S303).
[0055] Затем модуль 1033 коррекции позиции остановки транспортного средства определяет то, составляет значение оценки, вычисленное на этапе S303, пороговое значение Sth или выше либо нет (этап S304). Когда положительное определение выполняется на этапе S304, модуль 1033 коррекции позиции остановки транспортного средства перебазирует точку (x, y), чтобы перемещать ее на предварительно определенное расстояние D (например, 1 м) назад относительно текущей позиции вдоль целевого намеченного пути (этап S305). Здесь, предварительно определенное расстояние D может задаваться небольшим в максимально возможной степени с учетом точности приемного GPS-устройства 2 и картографических данных и нагрузки по обработке вычисления.
[0056] Вышеуказанные этапы S303-S305 многократно выполняются до тех пор, пока отрицательное определение не будет выполнено на этапе S304, т.е. до тех пор, пока значение оценки вышеприведенного выражения (7) не станет равным пороговому значению Sth или ниже. Здесь, пороговое значение Sth задается таким образом, что площадь, в которой S0x, y), перекрывает Sall, является достаточно широкой.
[0057] Когда отрицательное определение выполняется на этапе S304, модуль 1033 коррекции позиции остановки транспортного средства задает скорректированную точку (x, y) в качестве целевой позиции остановки транспортного средства (этап S307). Процесс коррекции позиции остановки транспортного средства в силу этого завершается.
[0058] Когда отрицательное определение выполняется на этапе S3,01, модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства задает позицию (x, y) остановки транспортного средства в качестве недопустимого значения (этап S306). Процесс коррекции позиции остановки транспортного средства в силу этого завершается.
[0059] Устройство задания позиции остановки транспортного средства настоящего варианта осуществления сконфигурировано и работает так, как указано выше, и в силу этого имеет следующие преимущества.
[0060] (1) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, целевой намеченный путь для рассматриваемого транспортного средства вычисляется, позиция остановки транспортного средства в конкретной настоящей/определенной ситуации, присутствующей на целевом намеченном пути, обнаруживается, и когда позиция остановки транспортного средства в определенной/конкретной ситуации обнаруживается, целевая позиция остановки транспортного средства задается для рассматриваемого транспортного средства как находящаяся в ориентации транспортного средства, которая соответствует определенной/конкретной ситуации. В силу этого рассматриваемое транспортное средство может управляться с возможностью останавливаться в ориентации, которая соответствует ситуации на целевом намеченном пути.
[0061] (2) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, целевая позиция остановки транспортного средства задается посредством коррекции впереди расположенной позиции остановки транспортного средства, которая задается впереди целевой позиции остановки транспортного средства задней стороне, на основе оценочной функции, которая оценивает целевую позицию остановки транспортного средства в соответствии с конкретной/определенной ситуацией. В силу этого, можно предотвращать остановку рассматриваемого транспортному средства за пределами требуемой позиции остановки транспортного средства в прямом направлении.
[0062] (3) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, когда рассматриваемое транспортное средство управляется с возможностью останавливаться в позиции, в которой присутствует стоп-линия, впереди расположенная позиция остановки транспортного средства задается равной позиции стоп-линии. Целевая позиция остановки транспортного средства в силу этого может задаваться позади стоп-линии, чтобы за счет этого предотвращать остановку рассматриваемого транспортного средства за пределами стоп-линии в прямом направлении.
[0063] (4) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, когда отсутствует стоп-линия, и рассматриваемое транспортное средство управляется с возможностью останавливаться в ситуации, в которой целевой намеченный путь пересекается со смежной полосой движения относительно полосы движения рассматриваемого транспортного средства, впереди расположенная позиция остановки транспортного средства задается равной позиции границы между полосой движения рассматриваемого транспортного средства и смежной полосой движения. Целевая позиция остановки транспортного средства в силу этого может задаваться в полосе движения рассматриваемого транспортного средства, чтобы за счет этого предотвращать остановку рассматриваемого транспортного средства за пределами граничной полосы движения в другой полосе движения.
[0064] (5) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, впереди расположенная позиция остановки транспортного средства задается на задней стороне относительно пешеходного перехода. Впереди расположенная позиция остановки транспортного средства в силу этого задается на задней стороне относительно пешеходного перехода, чтобы за счет этого обеспечивать возможность рассматриваемому транспортному средству останавливаться на ближней стороне относительно пешеходного перехода.
[0065] (6) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, когда целевой намеченный путь пересекается со смежной полосой движения относительно полосы движения рассматриваемого транспортного средства, оценочная функция задается таким образом, что значение оценки является более высоким по мере того, как параллелизм между рассматриваемым транспортным средством и полосой движения становится более высоким. В силу этого рассматриваемое транспортное средство может управляться с возможностью останавливаться при высоком параллелизме относительно полосы движения. Таким образом, может предотвращаться широкое блокирование полосы движения посредством рассматриваемого транспортного средства для остановки вследствие угла рассматриваемого транспортного средства на остановке относительно полосы движения, т.е. может предотвращаться создание помех для тракта для транспортного средства, движущегося позади рассматриваемого транспортного средства.
[0066] (7) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, когда встречная полоса движения присутствует на целевом намеченном пути, оценочная функция задается таким образом, что значение оценки является более высоким по мере того, как становится больше диапазон, в котором встречная полоса движения включена в диапазон распознавания камеры 12A. В силу этого информация относительно встречной полосы движения может быть включена в диапазон распознавания камеры 12A, и можно подавлять приостановку помощи при вождении, поскольку может распознаваться встречное транспортное средство.
[0067] (8) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, впереди расположенная позиция остановки транспортного средства корректируется на целевом намеченном пути на основе вектора касательной или вектора нормали целевого намеченного пути. В силу этого ориентация остановки транспортного средства может получаться со ссылкой на вектор касательной или вектор нормали целевого намеченного пути, и целевая ориентация остановки транспортного средства в силу этого может быть реализована.
[0068] (9) Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, когда целевая позиция остановки транспортного средства задается посредством постепенной коррекции позиции остановки транспортного средства назад, диапазон, в котором выполняется поиск целевой позиции остановки транспортного средства, является ограничивающим, и объем вычислений для коррекции позиции остановки транспортного средства в силу этого может уменьшаться.
[0069] Второй вариант осуществления
Фиг. 9 является функциональной блок-схемой устройства задания позиции остановки транспортного средства согласно второму варианту осуществления настоящего изобретения. Элементы, идентичные элементам в первом варианте осуществления, обозначаются посредством идентичных ссылок с номерами, и их описание заимствуется в данном документе и опускается.
[0070] Устройство задания позиции остановки транспортного средства согласно настоящему варианту осуществления имеет конфигурацию, в которой модуль 107 обнаружения характеристик следования пути добавляется в устройство задания позиции остановки транспортного средства согласно первому варианту осуществления. Модуль 107 обнаружения характеристик следования пути обнаруживает ошибку между текущим целевым намеченным путем и намеченным путем движения для рассматриваемого транспортного средства, когда рассматриваемое транспортное средство останавливается.
[0071] Модуль 107 обнаружения характеристик следования пути включает в себя запоминающее устройство, сохраняющее карту управления или таблицу управления, которая представляет взаимосвязь ошибки между кривизной, k, целевого намеченного пути и намеченным путем движения для рассматриваемого транспортного средства. Когда коррекция целевой позиции остановки транспортного средства выполняется, модуль 107 обнаружения характеристик следования пути выводит ошибку намеченного пути движения для рассматриваемого транспортного средства относительно кривизны, k, текущего целевого намеченного пути в модуль 1033 коррекции позиции остановки транспортного средства.
[0072] При выполнении вычисления оценочной функции для коррекции позиции остановки транспортного средства, такой как вышеприведенное выражение (6) или (7), модуль 1033 коррекции позиции остановки транспортного средства добавляет входную ошибку в точку (x, y). Когда оценочная функция использует вектор нормали или вектор касательной целевого намеченного пути, модуль 1033 коррекции позиции остановки транспортного средства вращает вектор нормали или вектор касательной в соответствии с входной ошибкой.
[0073] Согласно устройству задания позиции остановки транспортного средства настоящего варианта осуществления, позиция остановки транспортного средства корректируется в соответствии с характеристиками следования пути относительно целевого намеченного пути. В силу этого, когда управление выполняется для транспортного средства, к примеру, транспортное средство с автоматизированным режимом вождения, чтобы придерживаться целевого намеченного пути, позиция остановки транспортного средства может корректироваться в соответствии с ошибкой в управлении.
[0074] Вышеуказанное устройство 100 управления соответствует устройству задания позиции остановки транспортного средства настоящего изобретения, вышеуказанный модуль 102 вычисления целевого намеченного пути соответствует модулю вычисления целевого намеченного пути настоящего изобретения, вышеуказанный модуль 101 обнаружения позиции остановки транспортного средства/вычисления нормативных действий соответствует детектору позиции остановки транспортного средства настоящего изобретения, и вышеуказанный модуль 103 задания позиции остановки транспортного средства соответствует устройству задания позиции остановки транспортного средства настоящего изобретения. Вышеуказанный модуль 1031 вычисления впереди расположенной позиции остановки транспортного средства соответствует устройству задания впереди расположенной позиции остановки транспортного средства настоящего изобретения, вышеуказанный модуль 1032 для задания оценочной функции для коррекции соответствует устройству задания оценочных функций настоящего изобретения, и вышеуказанный модуль 1033 коррекции позиции остановки транспортного средства соответствует устройству коррекции настоящего изобретения.
[0075] Вышеуказанный модуль 12 распознавания внешней информации соответствует устройству распознавания внешней информации настоящего изобретения, и вышеуказанный модуль 107 обнаружения характеристик следования пути соответствует детектору характеристик следования пути настоящего изобретения.
[0076] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
Перечень позиционных обозначений
[0077] 100 - устройство управления
101 - модуль обнаружения позиции остановки транспортного средства/вычисления нормативных действий
102 - модуль вычисления целевого намеченного пути
103 - модуль задания позиции остановки транспортного средства
1031 - модуль вычисления впереди расположенной позиции остановки транспортного средства
1032 - модуль для задания оценочной функции для коррекции
1033 - модуль коррекции позиции остановки транспортного средства
107 - модуль обнаружения характеристик следования пути
12 - модуль распознавания внешней информации.


Настоящее изобретение относится к устройству и способу задания позиции остановки транспортного средства для задания позиции остановки транспортного средства. Устройство задания позиции остановки транспортного средства включает в себя модуль (102) вычисления целевого намеченного пути, выполненный с возможностью вычислять целевой намеченный путь для рассматриваемого транспортного средства, и детектор (101) позиции остановки транспортного средства, выполненный с возможностью обнаруживать позицию остановки транспортного средства в конкретной ситуации. Позиция остановки транспортного средства присутствует на целевом намеченном пути, вычисленном посредством модуля (102) вычисления целевого намеченного пути. Устройство задания позиции остановки транспортного средства дополнительно включает в себя модуль (103) задания позиции остановки транспортного средства, выполненный с возможностью, когда позиция остановки транспортного средства в конкретной ситуации обнаруживается посредством детектора (101) позиции остановки транспортного средства, задавать целевую позицию остановки транспортного средства для рассматриваемого транспортного средства как находящуюся в ориентации транспортного средства, которая соответствует конкретной ситуации. Технический результат – определение места остановки рассматриваемого транспортного средства в конкретной ситуации. 4 н. и 6 з.п. ф-лы, 9 ил.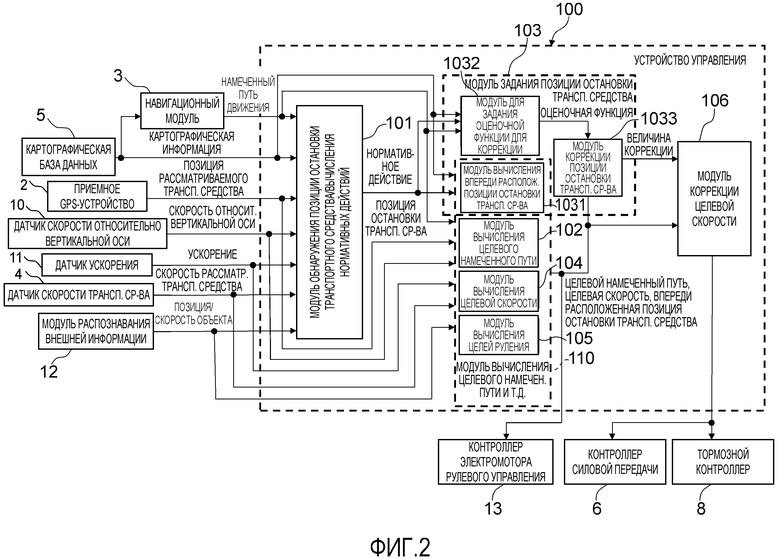
1. Устройство задания позиции остановки транспортного средства, содержащее:
модуль вычисления целевого намеченного пути, выполненный с возможностью вычислять целевой намеченный путь для рассматриваемого транспортного средства;
детектор позиции остановки транспортного средства, выполненный с возможностью обнаруживать позицию остановки транспортного средства в конкретной ситуации, причем позиция остановки транспортного средства присутствует на целевом намеченном пути, вычисленном посредством модуля вычисления целевого намеченного пути;
устройство задания позиции остановки транспортного средства, выполненное с возможностью, когда позиция остановки транспортного средства в конкретной ситуации обнаруживается посредством детектора позиции остановки транспортного средства, задавать целевую позицию остановки транспортного средства для рассматриваемого транспортного средства так, чтобы ориентация транспортного средства рассматриваемого транспортного средства соответствовала конкретной ситуации, причем ориентация транспортного средства представляет собой ориентацию рассматриваемого транспортного средства в целевой позиции остановки транспортного средства на вычисленном целевом намеченном пути; и
устройство задания впереди расположенной позиции остановки транспортного средства, выполненное с возможностью задавать впереди расположенную позицию остановки транспортного средства на целевом намеченном пути, причем впереди расположенная позиция остановки транспортного средства расположена на передней стороне в направлении движения относительно целевой позиции остановки транспортного средства на целевом намеченном пути,
при этом детектор позиции остановки транспортного средства получает внешнюю информацию из устройства распознавания внешней информации, выполненного с возможностью распознавать ситуацию рядом с рассматриваемым транспортным средством, и,
устройство задания позиции остановки транспортного средства корректирует, на целевом намеченном пути, впереди расположенную позицию остановки транспортного средства, заданную посредством устройства задания впереди расположенной позиции остановки транспортного средства так, чтобы, когда определяется, что встречная полоса движения присутствует на намеченном пути, на основе внешней информации, диапазон встречной полосы движения, включенный в диапазон распознавания устройства распознавания внешней информации, представлял собой заранее определенное пороговое значение или более.
2. Устройство задания позиции остановки транспортного средства по п. 1, в котором, когда стоп-линия присутствует в позиции остановки транспортного средства в конкретной ситуации, устройство задания впереди расположенной позиции остановки транспортного средства задает впереди расположенную позицию остановки транспортного средства как позицию стоп-линии.
3. Устройство задания позиции остановки транспортного средства по п. 1, в котором, когда стоп-линия не присутствует в позиции остановки транспортного средства в конкретной ситуации, и целевой намеченный путь пересекается со смежной полосой движения относительно полосы движения, в которой движется рассматриваемое транспортное средство, устройство задания впереди расположенной позиции остановки транспортного средства задает впереди расположенную позицию остановки транспортного средства как позицию граничной линии между полосой движения для рассматриваемого транспортного средства и смежной полосой движения.
4. Устройство задания позиции остановки транспортного средства по п. 1, в котором, когда пешеходный переход присутствует в позиции остановки транспортного средства в конкретной ситуации, устройство задания впереди расположенной позиции остановки транспортного средства задает впереди расположенную позицию остановки транспортного средства на задней стороне в направлении движения относительно пешеходного перехода.
5. Устройство задания позиции остановки транспортного средства по п. 1, в котором, когда целевой намеченный путь пересекается, в позиции остановки транспортного средства в конкретной ситуации, со смежной полосой движения относительно полосы движения, в которой рассматриваемое транспортное средство движется, устройство задания позиции остановки транспортного средства корректирует впереди расположенную позицию остановки транспортного средства, на целевом намеченном пути так, чтобы параллелизм между рассматриваемым транспортным средством и граничной линией, определенной смежной полосой движения и полосой, в которой движется рассматриваемое транспортное средство, представлял собой заранее определенное значение или более.
6. Устройство задания позиции остановки транспортного средства по любому из пп. 1-5, в котором устройство задания позиции остановки транспортного средства корректирует впереди расположенную позицию остановки транспортного средства на целевом намеченном пути на основе вектора касательной или вектора нормали целевого намеченного пути.
7. Устройство задания позиции остановки транспортного средства по п. 1, содержащее детектор характеристик следования пути, выполненный с возможностью обнаруживать характеристики следования пути, представляющие отличие от фактического намеченного пути движения для целевого намеченного пути для рассматриваемого транспортного средства,
при этом устройство задания позиции остановки транспортного средства корректирует впереди расположенную позицию остановки транспортного средства на основе характеристик следования пути, обнаруженных посредством детектора характеристик следования пути.
8. Способ задания позиции остановки транспортного средства, осуществляемый посредством компьютера устройства задания позиции остановки транспортного средства, оснащенного в транспортном средстве, при этом способ задания позиции остановки транспортного средства содержит:
первый этап, на котором вычисляют целевой намеченный путь для рассматриваемого транспортного средства, причем целевой намеченный путь задается в полосе движения;
второй этап, на котором обнаруживают позицию остановки транспортного средства в конкретной ситуации, причем позиция остановки транспортного средства присутствует на целевом намеченном пути, вычисленном на первом этапе;
третий этап, на котором, когда позиция остановки транспортного средства в конкретной ситуации обнаруживается на втором этапе, задают целевую позицию остановки транспортного средства для рассматриваемого транспортного средства так, чтобы ориентация транспортного средства рассматриваемого транспортного средства соответствовала конкретной ситуации, причем ориентация транспортного средства представляет собой ориентацию рассматриваемого транспортного средства в целевой позиции остановки транспортного средства на вычисленном целевом намеченном пути; и
четвертый этап, на котором задают впереди расположенную позицию остановки транспортного средства на целевом намеченном пути, причем впереди расположенная позиция остановки транспортного средства расположена на передней стороне в направлении движения относительно целевой позиции остановки транспортного средства на целевом намеченном пути,
при этом второй этап включает в себя получение внешней информации из устройства распознавания внешней информации, выполненного с возможностью распознавать ситуацию рядом с рассматриваемым транспортным средством, и
третий этап включает в себя корректировку, на целевом намеченном пути впереди расположенной позиции остановки транспортного средства, заданной на четвертом этапе так, чтобы, когда определяется, что встречная полоса движения присутствует на намеченном пути на основе внешней информации, диапазон встречной полосы движения, включенный в диапазон распознавания устройства распознавания внешней информации, представлял собой заранее определенное пороговое значение или более.
9. Устройство задания позиции остановки транспортного средства, содержащее:
модуль вычисления целевого намеченного пути, выполненный с возможностью вычислять целевой намеченный путь для рассматриваемого транспортного средства;
детектор позиции остановки транспортного средства, выполненный с возможностью обнаруживать позицию остановки транспортного средства в конкретной ситуации, причем позиция остановки транспортного средства присутствует на целевом намеченном пути, вычисленном посредством модуля вычисления целевого намеченного пути;
устройство задания позиции остановки транспортного средства, выполненное с возможностью, когда позиция остановки транспортного средства в конкретной ситуации обнаруживается посредством детектора позиции остановки транспортного средства, задавать целевую позицию остановки транспортного средства для рассматриваемого транспортного средства так, чтобы ориентация транспортного средства рассматриваемого транспортного средства соответствовала конкретной ситуации, причем ориентация транспортного средства представляет собой ориентацию рассматриваемого транспортного средства в целевой позиции остановки транспортного средства на вычисленном целевом намеченном пути; и
устройство задания впереди расположенной позиции остановки транспортного средства, выполненное с возможностью задавать впереди расположенную позицию остановки транспортного средства на целевом намеченном пути, причем впереди расположенная позиция остановки транспортного средства расположена на передней стороне в направлении движения относительно целевой позиции остановки транспортного средства на целевом намеченном пути,
при этом, когда целевой намеченный путь пересекается, в позиции остановки транспортного средства в конкретной ситуации, с полосой движения, смежной с полосой движения, по которой движется рассматриваемое транспортное средство, устройство задания позиции остановки транспортного средства корректирует, на целевом намеченном пути, впереди расположенную позицию остановки транспортного средства, заданную посредством устройства задания впереди расположенной позиции остановки транспортного средства так, чтобы параллелизм между рассматриваемым транспортным средством и упомянутой полосой движения представлял собой заранее определенное значение или более.
10. Способ задания позиции остановки транспортного средства, осуществляемый посредством компьютера устройства задания позиции остановки транспортного средства, оснащенного в транспортном средстве, при этом способ задания позиции остановки транспортного средства содержит:
первый этап, на котором вычисляют целевой намеченный путь для рассматриваемого транспортного средства, причем целевой намеченный путь задается в полосе движения;
второй этап, на котором обнаруживают позицию остановки транспортного средства в конкретной ситуации, причем позиция остановки транспортного средства присутствует на целевом намеченном пути, вычисленном на первом этапе;
третий этап, на котором, когда позиция остановки транспортного средства в конкретной ситуации обнаруживается на втором этапе, задают целевую позицию остановки транспортного средства для рассматриваемого транспортного средства так, чтобы ориентация транспортного средства рассматриваемого транспортного средства соответствовала конкретной ситуации, причем ориентация транспортного средства представляет собой ориентацию рассматриваемого транспортного средства в целевой позиции остановки транспортного средства на вычисленном целевом намеченном пути; и
четвертый этап, на котором задают впереди расположенную позицию остановки транспортного средства на целевом намеченном пути, причем впереди расположенная позиция остановки транспортного средства расположена на передней стороне в направлении движения относительно целевой позиции остановки транспортного средства на целевом намеченном пути,
при этом, когда целевой намеченный путь пересекается, в позиции остановки транспортного средства в конкретной ситуации, с полосой движения, смежной с полосой движения, по которой движется рассматриваемое транспортное средство, третий этап включает в себя корректировку, на целевом намеченном пути, впереди расположенной позиции остановки транспортного средства, заданной на четвертом этапе так, чтобы параллелизм между рассматриваемым транспортным средством и упомянутой полосой движения представлял собой заранее определенное значение или более.
| JP 2014028543 A, 13.02.2014 | |||
| WO 2015008588 A1, 22.01.2015 | |||
| JP 2005149402 A, 09.06.2005 | |||
| Механизм для преобразования вращательного движения в движение по заданному замкнутому контуру из прямолинейных отрезков | 1941 |
|
SU63094A1 |

