Предлагаемое изобретение относится к области военной техники и может быть использовано при создании самоходных комплексов с управляемым вооружением.
Известен самоходный противотанковый ракетный комплекс «Изделие 9П148» (Москва, Военное издательство 1989 г.), содержащий носитель, включающий отделение управления и боевое отделение, расположенные в едином внутреннем пространстве носителя. В отделении управления, находящемся в передней части корпуса носителя, расположено рабочее место оператора, пульт оператора и рубка с поворотными частями и закрепленным на них прибором наблюдения и слежения за целью. В средней части носителя размещено боевое отделение с пусковой установкой (ПУ), включающей поворотное основание и закрепленную на нем с возможностью вращения относительно горизонтальной оси раму с направляющими для ракет. Поворотные части рубки и ПУ снабжены электромеханическими приводами вертикального и горизонтального наведения. В боевом положении ПУ расположена над корпусом носителя, а в походном - опускается через люк загрузки внутрь боевого отделения. Перемещение рамы в верхнее (боевое) и нижнее (походное) положения осуществляется приводом вертикального наведения ПУ, представляющим собой электродвигатель с червячным редуктором. Для разгрузки приводов наведения поворотных частей рубки и ПУ от транспортных перегрузок при движении комплекса на марше (в походном положении) или при смене позиции (с ПУ, находящейся в боевом положении) они снабжены стопорами, приводимыми в действие оператором вручную. Стопорение или расстопорение рубки производится оператором с рабочего места, а для стопорения ПУ оператору необходимо переместится в боевое отделение.
Недостатком указанного технического решения является значительное время при переводе ПУ и рубки из походного положения в боевое и обратно, обусловленное тем, что стопорение или расстопорение рубки и ПУ производится оператором вручную, при этом оператору необходимо перемещаться из отделения управления в боевое и обратно.
Известен также универсальный боевой модуль (Патент RU 2559372 С1 от 14.07.2015 г.), предназначенный для поражения различной современной и перспективной бронетехники. Универсальный боевой модуль размещен в боевом отделении, расположенном в средней части внутреннего пространства легкого носителя, а отделение управления с рабочим местом оператора и дистанционным пультом управления - в его передней части. Модуль содержит жесткую пространственную ферму Г-образной формы, горизонтальная часть которой выполнена в виде фланца с внутренним проемом, снабженным фиксирующими площадками. На вертикальной части фермы закреплен механизм перевода пускового устройства в боевое и походное положения с поворотной частью, на которой закреплено пусковое устройство (ПУ), включающее механизмы вертикального и горизонтального наведения с электроприводами и поворотными частями, установленные на поворотной части механизма вертикального наведения направляющие с установленными в них ракетами, прицел-прибор наведения и кронштейн с выступами. Поворотная часть механизма перевода снабжена электрическим приводом с зубчатой передачей и сенсором угла ее поворота. Управление электроприводами наведения и механизмом перевода производится электронными блоками управления. В боевом положении ПУ находится над крышей носителя, а в походном - в средней части внутреннего пространства носителя. При движении комплекса ПУ зафиксирована от транспортных перегрузок только электроприводом механизма перевода.
Недостатком указанного технического решения является то, что при перемещении комплекса электропривод механизма перевода подвергается транспортным перегрузкам, многократно превышающим расчетные рабочие, что требует выполнения электропривода с большим запасом прочности и в свою очередь приводит к значительному увеличению массы и габаритов комплекса.
Задачей настоящего изобретения является создание самоходного ракетного комплекса с малыми габаритами, массой и временем приведения в боевое и походное положения.
Решение поставленной задачи достигается тем, что в самоходном ракетном комплексе, содержащем носитель, включающий рабочую зону оператора с пультом дистанционного управления и боевое отделение с установленным в нем пусковым устройством, содержащим механизмы вертикального и горизонтального наведения, установленные на поворотной части механизма вертикального наведения направляющие с управляемыми ракетами и прицел-прибор наведения, механизм перевода ПУ в боевое и походное положения, включающий раму с поворотной платформой, на которой закреплено ПУ, электропривод, соединенный с пультом дистанционного управления, в нем механизм перевода ПУ снабжен жестко закрепленным на поворотной платформе стопором, включающим основание с направляющей, установленные в ней правый и левый ползуны, снабженные на наружном конце клиновыми выступами, отверстие, установленный в нем с возможностью продольного перемещения вал с винтом, электропривод с расположенным на оси выходной шестерни резьбовым отверстием, взаимодействующим с винтом, сенсор расстопоренного и застопоренного положения ползунов, электрически соединенный с пультом дистанционного управления, правая и левая тяги, а рама - концентрично расположенными относительно оси поворотной платформы верхними и нижними опорами с пазами, причем в боевом положении комплекса ползуны клиновыми выступами взаимодействуют с пазами верхних, а в походном - нижних опор, тяги шарнирно соединены одним концом с верхней частью вала, а другим с правым и левым ползунами, ось цилиндрической направляющей выполнена параллельно, а ось отверстия - перпендикулярно оси поворотной платформы.
Верхние и нижние опоры выполнены с обеспечением регулирования в вертикальном, горизонтальном и осевом направлениях.
Сенсор положения ползунов содержит закрепленный на основании переменный резистор, соединенный с пультом дистанционного управления, на оси которого установлен рычаг с пазом, взаимодействующим с выступом, выполненным на валу.
Сущность предлагаемого изобретения поясняется чертежами, где на:
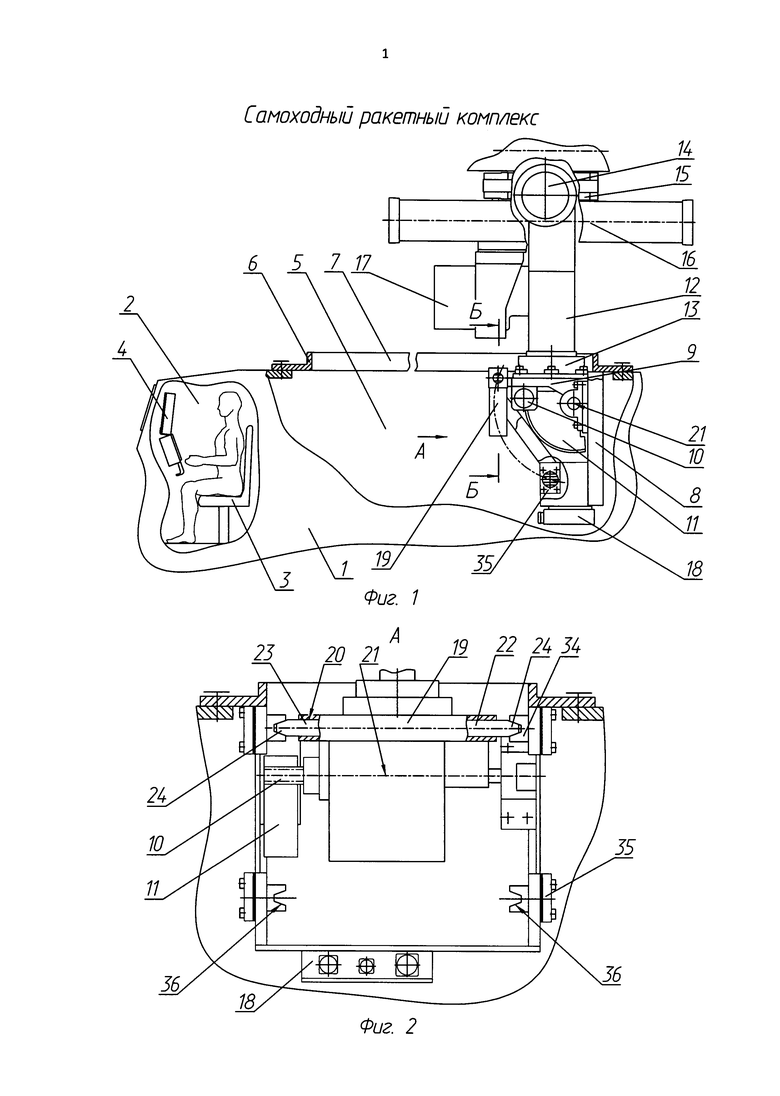
фиг. 1 изображен общий вид самоходного ракетного комплекса в боевом положении;
фиг. 2 изображен вид А на фиг. 1;
фиг. 3 изображен с увеличением разрез Б-Б на фиг. 1 со штоками, находящимися в застопоренном положении (штрихпунктирной линией показано положение штоков в расстопоренном положении);
фиг. 4 изображен общий вид самоходного ракетного комплекса в походном положении;
фиг. 5 изображен с увеличением разрез В-В на фиг. 3.
Самоходный ракетный комплекс содержит носитель 1 (фиг. 1) с отделением управления 2, включающим рабочее место оператора 3 с пультом дистанционного управления 4 и боевым отделением 5, расположенным в средней части носителя. В верхней части боевого отделения установлен механизм перевода ПУ в боевое и походное положения, включающий пространственную ферму, горизонтальная часть которой выполнена в виде закрепленного на носителе фланца 6 с внутренним проемом 7. На вертикальной части 8 фермы закреплена поворотная платформа 9 с электрическим приводом 10, взаимодействующим с зубчатым сектором 11. На поворотной платформе 9 закреплено пусковое устройство, включающее механизмы вертикального 12 и горизонтального 13 наведения с электроприводами и поворотными частями. На поворотной части 14 механизма вертикального наведения установлены направляющие 15 с управляемыми ракетами 16, и прицел-прибор наведения 17. Приведение механизма перевода в действие производится оператором с пульта дистанционного управления 4, электрически соединенного с блоком автоматики 18. Поворотная платформа снабжена жестко закрепленным на ней стопором, включающим основание 19 (фиг. 2) с цилиндрической направляющей 20, выполненной параллельно оси 21 поворотной платформы 9, установленные в ней с возможностью продольного перемещения правый 22 и левый 23 ползуны. На наружных концах ползунов выполнены клиновые выступы 24. На основании 19 выполнено отверстие 25 (фиг. 3), расположенное перпендикулярно оси цилиндрической направляющей, в котором установлен с возможностью продольного перемещения вал 26 с винтом 27. Стопор снабжен электроприводом, включающим электродвигатель 28, зубчатый редуктор 29 с выходным валом 30, снабженным внутренним резьбовым отверстием 31, которое взаимодействует с винтом 27. Верхняя часть вала 26 соединена с правым и левым ползунами с помощью тяг 32 посредством шаровых шарниров 33. Рама снабжена концентрично расположенными относительно оси 21 поворотной платформы верхними 34 (фиг. 2) и нижними 35 опорами с клиновыми пазами 36. В боевом положении комплекса правый и левый ползуны находятся в застопоренном положении и взаимодействуют своими клиновыми выступами 24 с пазами 36 верхних, а в походном - нижних опор. В расстопоренном положении (фиг. 3) ползуны выходят из пазов 36. Для обеспечения надежной фиксации поворотной платформы в боевом и походном положениях (боковой зазор между клиновыми выступами и пазами должен отсутствовать) верхние и нижние опоры и выполнены регулируемыми в виде фланца 37 (фиг. 3) с цилиндрическим выступом 38, на торце которого выполнен клиновой паз 36. Цилиндрические выступы 38 установлены в отверстия 39 рамы с зазором 40 и закреплены на ней болтами 41. Регулировка осуществляется в горизонтальном и вертикальном направлениях в пределах зазора 40, а в осевом - прокладками 42. Перевод комплекса из походного положения в боевое и обратно осуществляется оператором с дистанционного пульта управления.
Останов ползунов 22 и 23 в застопоренном или расстопоренном положении осуществляется блоком автоматики, электрически соединенным с сенсором положения ползунов. Сенсор содержит переменный резистор 43 (фиг. 5), на поворотной части 44 которого закреплен рычаг 45 с пазом 46. На валу 26 выполнен выступ 47, взаимодействующий с пазом 46, при этом поступательное движение ползуна преобразуется во вращательное поворотной части 44 переменного резистора.
Перевод комплекса в боевое или походное положения осуществляется оператором со своего рабочего места, используя дистанционный пульт управления, что уменьшает время перевода.
Наличие стопора в механизме перевода ПУ позволяет полностью разгрузить его электропривод от транспортных перегрузок и уменьшить его массу и габариты. Направляющая с ползунами, отверстие с установленным в нем с возможностью продольного перемещения валом с винтом, взаимодействующим резьбовым отверстием электропривода, тяги, шарнирно соединенные с валом и штоками, составляют винто-рычажный механизм, обеспечивающий в застопоренном положении значительное усилие на ползунах, что позволяет использовать в стопоре маломощный электропривод с малыми габаритами и массой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2559372C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| Самоходный ракетный комплекс | 2016 |
|
RU2620629C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ КОМПЛЕКС | 2015 |
|
RU2582437C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2005 |
|
RU2312294C2 |
| ПОДВИЖНЫЙ ПУНКТ ЦЕЛЕУКАЗАНИЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2480705C2 |
| Боевой модуль и способ использования боевого модуля | 2017 |
|
RU2670594C1 |
| ВЫСОКОТОЧНАЯ КОМПЛЕКСНАЯ ТАКТИЧЕСКАЯ РАКЕТНАЯ УСТАНОВКА БЛИЖНЕГО ДЕЙСТВИЯ | 2015 |
|
RU2642019C2 |
| РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2348887C2 |

Изобретение относится к конструкции мобильных комплексов с управляемым вооружением. Самоходный ракетный комплекс содержит носитель, включающий рабочую зону оператора, пульт дистанционного управления и боевое отделение с пусковым устройством (ПУ). ПУ содержит механизмы наведения, прицел-прибор наведения, механизм перевода ПУ в боевое и походное положения. Механизм перевода ПУ снабжен жестко закрепленным на поворотной платформе стопором, включающим основание с направляющей, в которой установлены правый и левый ползуны, и с отверстием, в котором установлен с возможностью продольного перемещения вал с винтом, электропривод, сенсор расстопоренного и застопоренного положения ползунов, правая и левая тяги. Рама снабжена концентрично расположенными относительно оси поворотной платформы верхними и нижними опорами с пазами. Тяги шарнирно соединены одним концом с верхней частью вала, а другим - с правым и левым ползунами. Техническим результатом изобретения является создание самоходного ракетного комплекса с малыми массогабаритными характеристиками и уменьшенным временем приведения комплекса в боевое и походное положения. 2 з.п. ф-лы, 5 ил.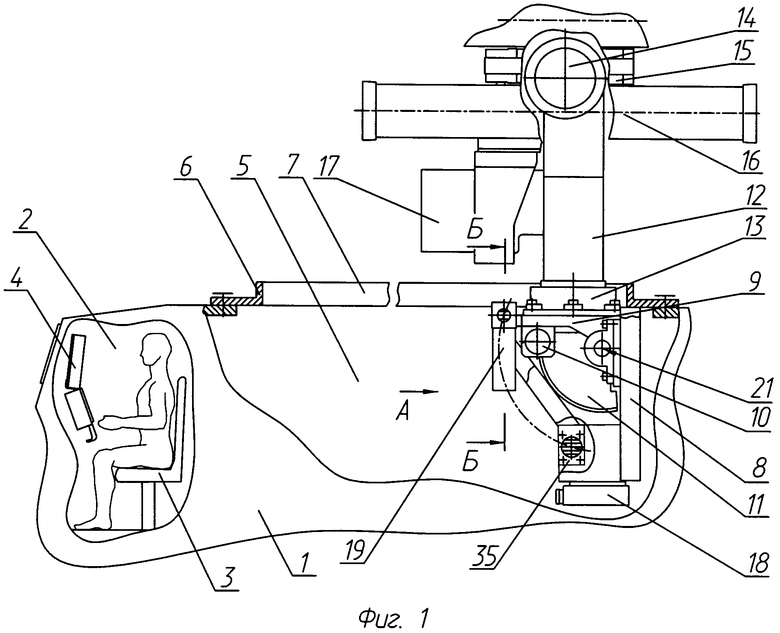
1. Самоходный ракетный комплекс, содержащий носитель, включающий рабочую зону оператора с пультом дистанционного управления и боевое отделение с установленным в нем пусковым устройством (ПУ), содержащим механизмы вертикального и горизонтального наведения, направляющие с управляемыми ракетами, прицел-прибор наведения, механизм перевода ПУ в боевое и походное положения, включающий раму с поворотной платформой, на которой закреплено ПУ, электропривод, соединенный с пультом дистанционного управления, отличающийся тем, что механизм перевода ПУ снабжен жестко закрепленным на поворотной платформе стопором, включающим основание с направляющей, в которой установлены правый и левый ползуны, снабженные на наружном конце клиновыми выступами, и с отверстием, в котором установлен с возможностью продольного перемещения вал с винтом, электропривод, с расположенным на оси выходной шестерни резьбовым отверстием, взаимодействующим с винтом, сенсор расстопоренного и застопоренного положения ползунов, электрически соединенный с пультом дистанционного управления, правая и левая тяги, а рама снабжена концентрично расположенными относительно оси поворотной платформы верхними и нижними опорами с пазами, причем ползуны в боевом положении комплекса клиновыми выступами взаимодействуют с пазами верхних, а в походном - нижних опор, тяги шарнирно соединены одним концом с верхней частью вала, а другим - с правым и левым ползунами, ось цилиндрической направляющей выполнена параллельно, а ось отверстия - перпендикулярно оси поворотной платформы.
2. Самоходный ракетный комплекс по п. 1, отличающийся тем, что верхние и нижние опоры выполнены регулируемыми в вертикальном, горизонтальном и осевом направлениях.
3. Самоходный ракетный комплекс по пп. 1 и 2, отличающийся тем, что сенсор содержит закрепленный на основании переменный резистор, соединенный с пультом дистанционного управления, на оси которого установлен рычаг с пазом, взаимодействующим с выступом, выполненным на валу.
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2559372C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ КОМПЛЕКС | 2015 |
|
RU2582437C1 |
| US 7086318 B1, 08.08.2006. | |||

