Изобретение относится к области военной техники, а именно к автоматизированному вооружению, которое устанавливается на наземные роботехнические комплексы военного назначения, и может быть использовано для повышения эффективности наблюдения за местностью (распознавания целей, определения дальности до целей, целеуказания и корректирования огня), ведения прицельного огня, а также повышения скрытности образца на поле боя.
В настоящее время известно огромное количество боевых модулей, как отечественного, так и зарубежного производства, например:
Боевой модуль военной техники («Руководство по материальной части и эксплуатации танка ПТ-76», Воениздат МО СССР, Москва, 1963 г., Стр. 3-17), включающий бронированную башню с артиллерийским орудием, боеукладку, систему заряжания и прицельно-наблюдательный комплекс.
Боевая машина пехоты БМП-1 («Боевая машина пехоты БМП-1. Техническое описание. Воениздат МО СССР, Москва, 1972 г., стр. 14) которая имеет боевое отделение, включающее броневой колпак с подвесной корзиной. В броневом колпаке устанавливают: гладкоствольное орудие калибра 73 мм, спаренный пулемет, механизм заряжания орудия, прицел, аппаратура управления, привода наведения, приборы наведения.
Из патента (RU 2254546 С1, Опубл. 20.06.2005 г.) известна бронированная башня боевой машины, содержащая стабилизированную пушку, спаренную с пулеметом, средство для установки ракетного комплекса, гранатометы, стабилизированную поисково-прицельную аппаратуру с тепловизионным каналом, лазерный дальномер и т.д.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике (Патент RU 55117 U1, Опубл. 27.07.2006), содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57-мм автоматической пушки, системы управления огнем, стабилизатора вооружения.
Дистанционно-управляемый боевой модуль (Патент RU 2715254 U1, Опубл. 26.02.2020), содержащий механический модуль и размещенные в нем: пулемет крупного калибра, система питания, состоящая из расположенного внутри механического модуля съемного магазина с лентой, снаряженной патронами, и тракта питания пулемета.
Общим недостатком представленных выше технических решений является то, что конструкция упомянутых выше боевых модулей не позволяет осуществлять поиск и обнаружение целей, а также вести огонь по этим целям из укрытий (капониров), закрытых позиций, в условиях относительно высокой, густой растительности (молодой лес, кустарник), естественных препятствий (холмы, пригорки)
Проблема ограниченных возможностей образца по ведению разведки целей противника в условиях ограниченной видимости может быть решена применением БпЛА коптерного типа или «привязанных» БпЛА. В частности, примером системы является БпЛА CableGuard польской фирмы FlyFocus (https://www.soel.ru/novosti/2020/flyfocus_razrabatyvaet_privyaznoy_bpla_so_syemnym_kabelem_dlya_sistem_nablyudeniya_osobogo_naznachen/), обладающий невысокой полезной нагрузкой порядка 1 кг и высотой подъема до 70 м. При этом реализована возможность отсоединения кабеля с автоматической его смоткой и последующим 30-минутным полетом на встроенном аккумуляторе. БпЛА снабжен убирающимися шасси-опорами, не мешающими обзору с камер в полете.
Вместе с тем, конструктивная сложность, высокая стоимость, низкая автономность (в случае отсутствия проводной связи с летательным аппаратом) и высокий уровень шума БпЛА не обеспечивающий выполнение требований по скрытности применения робототехнического комплекса сдерживает их широкое применение.
Из уровня техники известен способ повышения эффективности наблюдения из БМП-2 (Патент RU №2529117, МПК F41G 5/14, F41H 7/02, обул. 27.09.2014 г.), включающий прибор наблюдения ТКН-3Б и осветитель ОУ-3ГА2, телескопическую штангу с подвижно расположенным на ней оптико-электронным прибором наблюдения, пневмокран, исполнительный пневмоцилиндр, головку подвода воздуха соединенные трубопроводами, электромеханический стабилизатор соединенный электропроводом с дисплеем и органом управления вертикальным наведением прибора.
Также известно устройство наблюдения за местностью из БМП-2 (Патент RU №201166, МПК F41G 5/14, опубл. 01.12.2020 г.), содержащее башню машины, телескопическую штангу с подвижно расположенным на ней оптико-электронным прибором наблюдения, пневмокран, исполнительный пневмоцилиндр, головку подвода воздуха соединенные трубопроводами, электромеханический стабилизатор, соединенный с дисплеем и органом управления вертикальным наведением прибора электропроводом, в пневматическую магистраль установлен эжектор, диффузор которого трубопроводом соединен с электромагнитным клапаном.
Представленные выше устройства позволяют частично решить проблему поиска и обнаружения целей в условиях ограниченной видимости, вместе с тем проблема ведения огня по целям из-за естественных препятствий в этих предложениях решения не нашла.
Наиболее близким техническим решением к заявленному изобретению является универсальный боевой модуль (Патент RU 2559372 С1, Опубл. 10.08.2015), содержащий шасси с элементами крепления, пусковое устройство (ПУ) с направляющими для управляемых ракет, включающее механизмы вертикального и горизонтального наведения с электроприводами и поворотными частями, установленные на поворотной части механизма вертикального наведения направляющие для ракет, прицел-прибор наведения и автомат сопровождения цели, механизм перевода ПУ в боевое и походное положения, блоки управления электроприводами наведения и механизмом перевода ПУ, пульт дистанционного управления, элементы крепления боевого модуля к опорному устройству, отличающийся тем, что он снабжен жесткой пространственной фермой Г-образной формы, горизонтальная часть которой выполнена в виде фланца с проемом, элементами крепления и фиксирующими площадками, а вертикальная – в виде рамы с закрепленными на ней блоками управления механизмами наведения и механизмом перевода ПУ, включающим шарнирно закрепленную на горизонтальной оси поворотную платформу и соосный с ней зубчатый сектор, причем поворотная платформа снабжена электрическим приводом с выходной шестерней, взаимодействующей с зубчатым сектором и сенсором угла ее поворота, механизм горизонтального наведения закреплен на поворотной платформе, механизм вертикального наведения - на его поворотной части, снабженной кронштейном с выступами, взаимодействующими в походном положении с фиксирующими площадками.
Недостатками прототипа является его низкая эффективность, обусловленная следующим:
1. Ограниченная высота подъема вооружения прототипа над корпусом образца, обусловленная конструкцией механизма перевода в боевое положение не позволяющая эффективно осуществлять поиск и обнаружение целей, или вести огонь по этим целям в условиях ограниченной видимости когда высота укрытий, естественных и искусственных препятствий расположенных перед выходным окном прицела-прибора наблюдения выше чем жесткая пространственная Г образная ферма на которой оно размещено.
2. Отсутствием возможности изменить высоту подъема вооружения и прицела-прибора наблюдения в зависимости от высоты естественных и искусственных препятствий, мешающих наблюдению, прицеливанию и ведению огня по целям.
3. Необходимостью резервирования свободного пространства в корпусе робототехнического комплекса для размещения вооружения в походном положении. Принимая во внимание плотность компоновки робототехнического комплекса, разместить вооружение внутри его корпуса для транспортирования в походном положении увеличивает габаритные характеристики робототехнического комплекса, снижая скрытность его применения.
Задачей и техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение эффективности робототехнического комплекса при наблюдении и ведении огня в условиях ограниченной видимости с обеспечением скрытности его применения.
Технический результат достигается тем, что в что в составе боевого модуля используют ножничный механизм, выполненный из шарнирно соединенных между собой рычагов, один из которых шарнирно прикреплен к основанию с зубчатым сектором, другой к штоку электропривода. Механизм вертикального наведения состоит из электропривода, корпус которого шарнирно прикреплен к ножничному механизму, а шток шарнирно соединен с передним краем ложемента. Задний край ложемента шарнирно соединяют с кареткой, перемещение которой осуществляется по направляющим.
Предложение поясняется рисунками, где:
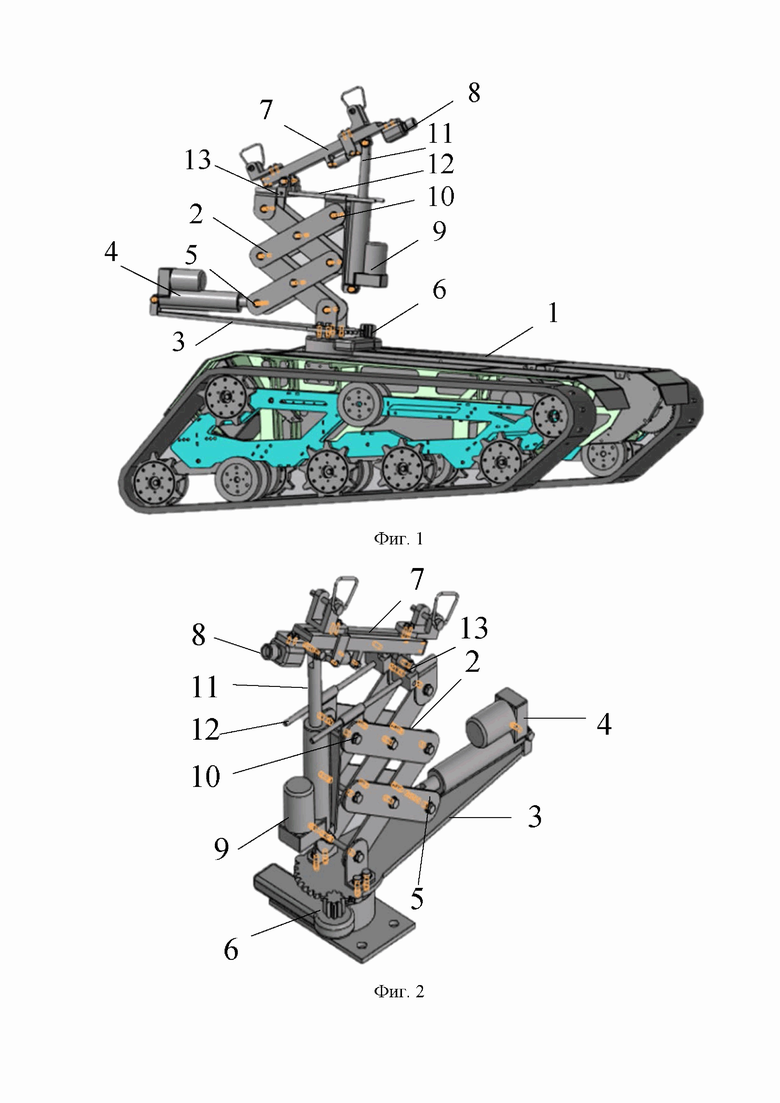
на фиг. 1 изображен общий вид робототехнического комплекса с размещенным на нем боевым модулем с ножничным подъемником;
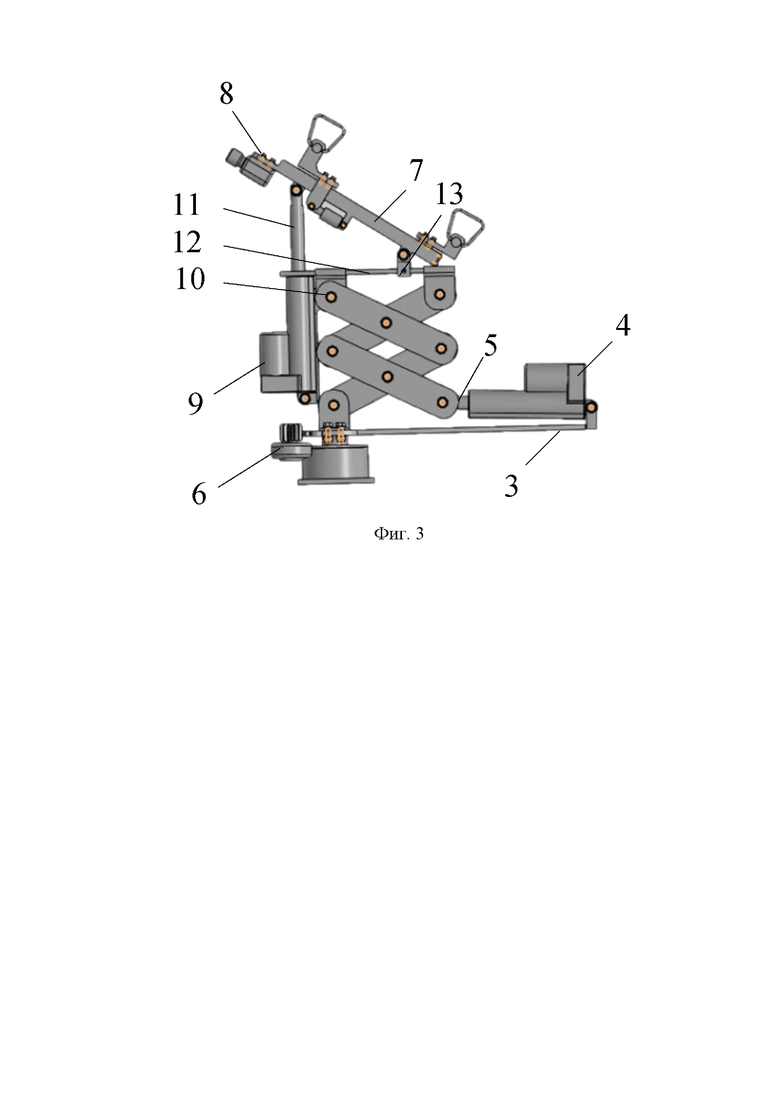
на фиг. 2 и 3 изображен общий вид боевого модуля с ножничным подъемником.
Заявленный наземный робототехнический комплекс с ножничным подъемником боевого модуля содержит: шасси 1 робототехнического комплекса, боевой модуль, состоящий из ножничного механизма 2, выполненного из шарнирно соединенных между собой рычагов, один из которых шарнирно прикреплен к основанию 3 с зубчатым сектором, электропривода 4 одним концом шарнирно прикрепленного к основанию 3 с зубчатым сектором, шток 5 которого шарнирно соединен с другим рычагом ножничного механизма 2, механизма горизонтального наведения выполненного в виде электродвигателя с шестерней 6, универсального ложемента 7 с механизмом вертикального наведения, прицелом-прибором наведения и автоматом сопровождения цели 8, пульта дистанционного управления (на фиг. не показан). Механизм вертикального наведения состоит из электропривода 9 корпус которого шарниром 10 прикреплен к ножничному механизму 2, а штоком 11 шарнирно соединен с передним краем ложемента 7, и устройства компенсации перемещения, содержащего направляющие 12 и каретку 13 шарнирно соединенную с задним краем ложемента 7.
Заявленный наземный робототехнический комплекс с ножничным подъемником боевого модуля функционирует следующим образом. В зависимости от задач, стоящих перед оператором робототехнического комплекса, боевой модуль укомплектовывается тем вооружением, которое позволит выполнить задачу с большей эффективностью. На универсальном ложементе 7 с помощью переднего и заднего подвижных фиксаторов с пальцами (на фиг. позиции не обозначены) закрепляют автоматическое стрелковое оружие с требуемыми для выполнения задачи характеристиками. При ведении наблюдения и (или) огня робототехническим комплексом в условиях ограниченной видимости, из укрытий (капониров), закрытых позиций, в условиях относительно высокой, густой растительности (молодой лес, кустарник), естественных препятствий (холмы, пригорки) оператор посредством дистанционного управления (на фиг. не показан) управляет подъемом боевого модуля на требуемую высоту. Для этого команда на подъем модуля с пульта дистанционного управления поступает на электропривод 4, который одним концом шарнирно прикреплен к основанию 3 с зубчатым сектором, а штоком 5 шарнирно соединен с рычагом ножничного механизма 2. При этом усилие от поступательного движения штока 5 электропривода 4 передается на подвижный рычаг ножничного механизма 2, шарнирное соединение рычагов которого обеспечивает подъем универсального ложемента 7, закрепленного на нем вооружения и прицела-прибора наведения и автомата сопровождения цели 8 на требуемую высоту.
Вертикальное наведение вооружения обеспечивается следующим образом. Оператор посредством дистанционного управления (на фиг. не показан) управляет вертикальным наведением вооружения. Для этого команда с пульта дистанционного управления поступает на электропривод 9 корпус, которого шарниром 10 прикреплен к ножничному механизму 2, а штоком 11 шарнирно соединен с передним краем ложемента 7. Поступательное движение штока 11 шарнирно соединённого с передним краем ложемента 7 обеспечивает подъем закрепленного на нем вооружения и прицела-прибора наведения и автомата сопровождения цели 8 на требуемый угол. Свободное перемещение заднего края ложемента 7 при подъеме переднего обеспечивается устройством компенсации перемещения, за счет перемещения каретки 13 соединенной с задним краем ложемента 7 по направляющим 12.
Горизонтальное наведение вооружения обеспечивается за счет перемещения зубчатого сектора, выполненного на основании 3 при вращении шестерни 6 закрепленной на валу электродвигателя.
Таким образом, заявленное техническое решение обеспечивает повышение эффективности робототехнического комплекса при наблюдении и ведении огня в условиях ограниченной видимости с обеспечением скрытности его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
Изобретение относится к области военной техники. В составе боевого модуля используют ножничный механизм, выполненный из шарнирно соединенных между собой рычагов, один из которых шарнирно прикреплен к основанию с зубчатым сектором, другой к штоку электропривода. Механизм вертикального наведения состоит из электропривода, корпус которого шарнирно прикреплен к ножничному механизму, а шток шарнирно соединен с передним краем ложемента. Задний край ложемента шарнирно соединяют с кареткой, перемещение которой осуществляется по направляющим. Достигается повышение эффективности робототехнического комплекса при наблюдении и ведении огня в условиях ограниченной видимости. 1 з.п. ф-лы, 3 ил.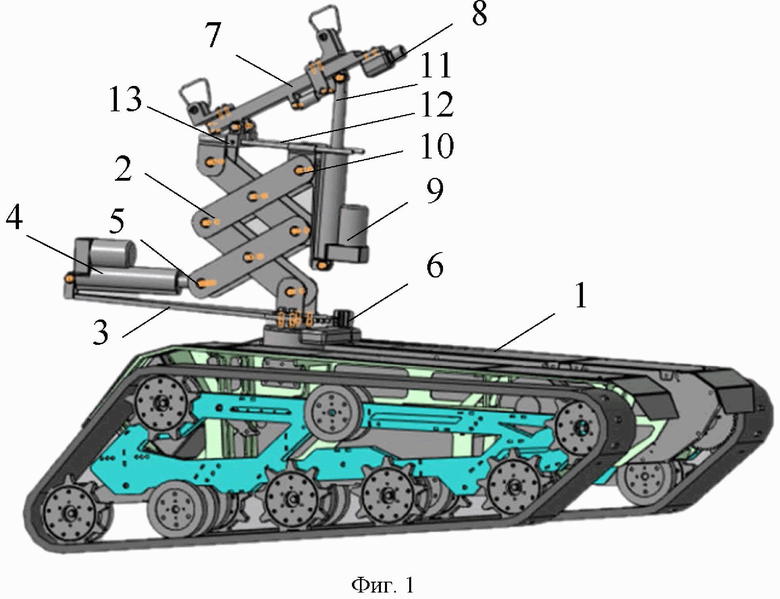
1. Наземный робототехнический комплекс с ножничным подъемником боевого модуля, состоящий из шасси, боевого модуля, механизмов вертикального и горизонтального наведения с электроприводами и поворотными частями, прицела-прибора наведения с автоматом сопровождения цели, блока управления электроприводами наведения, пульта дистанционного управления, отличающийся тем, что в составе боевого модуля используют ножничный механизм, выполненный из шарнирно соединенных между собой рычагов, один из которых шарнирно прикреплен к основанию с зубчатым сектором, другой рычаг шарнирно прикреплен к штоку электропривода, который шарнирно соединен с основанием с зубчатым сектором, установленным на шасси.
2. Наземный робототехнический комплекс с ножничным подъемником боевого модуля по п.1, отличающийся тем, что механизм вертикального наведения состоит из электропривода и устройства компенсации перемещения, содержащего направляющие и каретку, корпус электропривода шарнирно прикреплен к ножничному механизму, а шток шарнирно соединен с передним краем ложемента, на котором установлен прицел-прибор наведения с автоматом сопровождения цели, в свою очередь, задний край ложемента шарнирно соединяют с кареткой, перемещение которой осуществляется по направляющим.
| CN 210689391 U, 05.06.2020 | |||
| US 4587881 A, 13.05.1986 | |||
| Комплекс вооружения танка | 2023 |
|
RU2816418C1 |
| US 20200072581 A1, 05.03.2020. | |||

