Предлагаемое изобретение относится к технике вооружения и может быть использовано при создании мобильных комплексов с управляемым вооружением.
В настоящее время на вооружении армий многих стран мира имеется широкая номенклатура противотанковых ракетных комплексов (ПТРК), на которые возлагаются задачи отражения атак бронированной техники при действии в обороне, огневая поддержка антитеррористических операций, уничтожение огневых точек и других объектов противника. При этом подавляющее большинство комплексов не обеспечивает поражение малоскоростных воздушных целей (боевых вертолетов, дистанционно пилотируемых летательных аппаратов, атакующих самолетов штурмовой авиации), ставших в современных условиях наиболее опасными противниками на поле боя. При этом дальность эффективного действия их вооружения (5-6 км) превышает дальность действия большинства ПТРК. Сказанное выше определяет необходимость создания многоцелевых комплексов с управляемым вооружением, обеспечивающих поражение бронированной техники и летательных аппаратов из безопасной зоны при обеспечении боевой производительности, характерной для комплексов меньшей дальности. Таким образом, решение этих противоречивых требований является актуальной задачей.
Известно противотанковое управляемое ракетное оружие (Патент США US 7,086,318 В1 от 8.08.2006), предназначенное для поражения различной бронетехники. Вооружение, состоящее по крайней мере из двух ракетных пусковых, и устройство управления вооружением установлены в люльке, расположенной на встроенной в корпус боевой машины поворотной платформе. На поворотной платформе установлена подъемная платформа для перемещения по углу места. Наведение оружия на цель обеспечивается электрическими приводами. Поворотная платформа представляет собой встроенный в крышу носителя погон диаметром, соизмеримым с шириной носителя. Внутри корпуса боевой машины размещается автомат сопровождения цели, станция оператора, включающая биокулярный дисплей и пульт оператора, сиденье оператора, а также электрические линии связи, объединяющие станцию оператора, автомат сопровождения цели и электрические приводы наведения. Вооружение комплекса может быть переведено из положения боевой готовности в походное положение, при котором размер боевой машины в походном положении является многим меньше боевого. Указанное оружие имеет дальность действия 3750 м, что не обеспечивает поражение летательных аппаратов из безопасной зоны, а также достаточной боевой производительности.
Известен также ПТРК «Caracal» (Сборник научно-технической информации №3 (37) Тула, 2011), предназначенный для поражения различной бронетехники на дальностях до 5500 м. ПТРК «Carakal» содержит следующие основные элементы: дистанционно управляемый боевой модуль, включающий: 2 или 4 ПТУР в контейнере, пусковую установку; пульт управления, носитель. Пусковая установка размещена на подъемном механизме. В походном положении она находится внутри корпуса боевой машины, а при переводе в боевое положение - поднимается над корпусом. Пусковая установка включает: направляющие для ракет, прибор наведения, тепловизионный прицел, автомат сопровождения цели, приводы наведения. Пульт управления находится в средней части боевой машины. Вся информация о боевой работе отображается на дисплее оператора. Используя пульт управления, оператор проверяет работоспособность оборудования, осуществляет пуск и наведение ракеты в полете и оценивает результаты стрельбы. Комплекс размещается на шасси боевой машины с колесной формулой 4×4.
Недостатком указанного технического решения является недостаточная боевая производительность при максимальной дальности стрельбы. Известен также ПТРК «Хризантема-С» (Сборник научно-технической информации №1, Тула, 2002), принятая авторами за прототип. Система «Хризантема -С» может быть установлена на различных носителях, колесных и гусеничных. Боевой вес системы составляет 19,4 т. Расчет системы состоит из двух человек: командира - наводчика и водителя, их места расположены в передней части носителя. Данная система способна поражать не только основные боевые танки на больших дальностях, но и вертолеты и самолеты, летящие на малых скоростях и низких высотах. Система имеет два канала наведения: автоматический, с помощью РЛС, и полуавтоматический по - лучу лазера. РЛС, работающая в миллиметровом диапазоне, снабжена устройством наведения с подъемной и поворотной частями, установлена в левой части крыши башни и используется для обнаружения целей и наведения ракеты в режиме автосопровождения цели, при этом реализуется принцип «выстрелил и забыл». Когда нет необходимости в применении РЛС, она убирается в корпус под бронезащиту с помощью механизма перевода в боевое и походное положения. Второй режим представляет собой полуавтоматическое наведение по лучу лазера. Здесь используется устройство наведения с подъемной и поворотной частями, установленное в передней части верхней наклонной броневой плиты боевой машины. Лазерный прицел наведения закреплен на подъемной части устройства наведения. В походном положении устройство не убирается внутрь боевой машины. Так как система использует два канала наведения и ПУ на две ракеты, она обладает способностью поражать две цели одновременно, используя разные методы наведения: автоматического радиолокационного, полуавтоматического по лучу лазера и комбинированного. В комбинированном режиме последовательно запускаются две ракеты. Первая наводится РЛС (автоматически), а вторая - по лазерному лучу (полуавтоматически). Двухканальная система наведения существенно повышает эффективность комплекса. Пусковая установка имеет механизмы вертикального и горизонтального наведения, электрически связанные с каналами наведения, и в походном положении убирается внутрь носителя с помощью механизма перевода в боевое и походное положения. В комбинированном режиме стрельба производится в два приема: - производится наведение на цель с помощью РЛС в автоматическом режиме, пусковая установка выстреливает ракету в управляющий луч РЛС, а затем с помощью второго канала производится захват в полуавтоматическом режиме второй цели. Пусковая установка поворачивается в направлении второго канала и выстреливает ракету в управляющий луч второго канала. Углы наведения при стрельбе в любом из режимов ограничены. Дальность стрельбы составляет 6000 м. Недостатком указанного ПТРК является недостаточная огневая производительность, обусловленная тем, что в нем не в полной мере используются преимущества двухканальной системы наведения, а также большой вес комплекса, что требует использования носителя большой грузоподъемности.
Задачей настоящего изобретения является создание многоцелевого ракетного комплекса, обеспечивающего высокую огневую производительность, а также возможность его размещения на широком спектре носителей малой грузоподъемности.
Решение поставленной задачи достигается тем, что в многоцелевом ракетном комплексе, содержащем носитель, установленные на нем с интервалом правое и левое устройства наведения с подъемными и поворотными частями, закрепленные на подъемных частях приборы с каналами наведения, направляющие с установленными в них управляемыми ракетами, механизмы перевода в боевое и походное положения, устройство управления вооружением, обеспечивающее различные режимы стрельбы, в нем направляющие с установленными в них управляемыми ракетами закреплены на подъемных частях правого и левого устройства наведения, а их поворотные части - на механизмах перевода в боевое и походное положения. Поворотные части выполнены с обеспечением ограничения углов поворота в режиме одновременной стрельбы с правого и левого устройств наведения. Углы поворота А в режиме одновременной стрельбы определяются из соотношения: А=arc cos x,
где cos х=(Б-Д)/2С,
Б - длина интервала между осями поворотных частей, мм;
С - длина радиуса от оси поворотной части до наиболее удаленной точки управляемой ракеты, мм;
Д - минимальное расстояние между управляемыми ракетами при одновременной стрельбе, мм.
Наличие направляющих с установленными в них управляемыми ракетами на подъемных частях правого и левого устройств наведения позволяет исключить из комплекса отдельную пусковую установку с приводами наведения, что значительно снижает массу и габариты комплекса и позволяет размещать его на носителе малой грузоподъемности.
Направляющие правого и левого устройств наведения выполнены с обеспечением размещения на них по крайней мере двух управляемых ракет, что позволяет вести интенсивную стрельбу например «залпом» с правого и левого устройств наведения одновременно, при этом в полете к цели находятся 4 ракеты. Указанная конструкция не требует дополнительного времени для поворота пусковой установки из одного управляющего луча в другой при двухканальном режиме стрельбы. В случае стрельбы только с одного устройства наведения, находящегося в боевом положении, угол горизонтального наведения не ограничен.
В боевом положении правое и левое устройства наведения с управляемыми ракетами находятся над крышей носителя, а в походном - убираются с помощью механизмов перевода в боевое и походное положения внутрь носителя, при этом носитель не имеет выступающих частей, что улучшает его эксплуатационные характеристики. Предлагаемое изобретение повышает боевую производительность комплекса и позволяет размещать его на носителях малой грузоподъемности.
Сущность предлагаемого изобретения поясняется чертежами, где на:
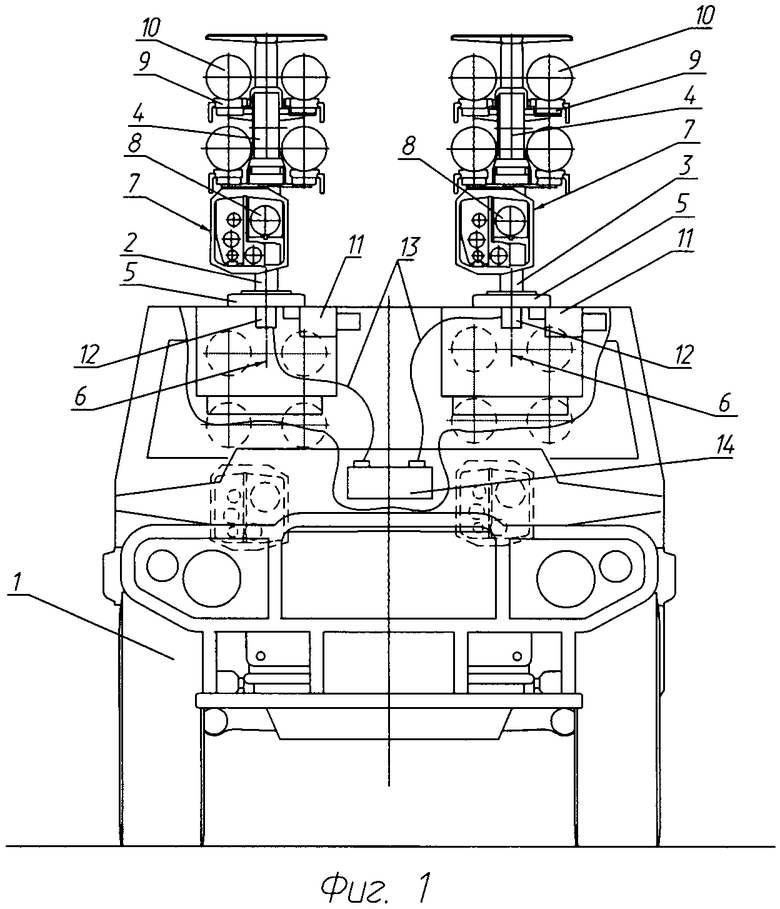
Фиг. 1 изображен общий вид спереди многоцелевого ракетного комплекса в боевом положении (пунктирными линиями показаны устройства наведения в походном положении);
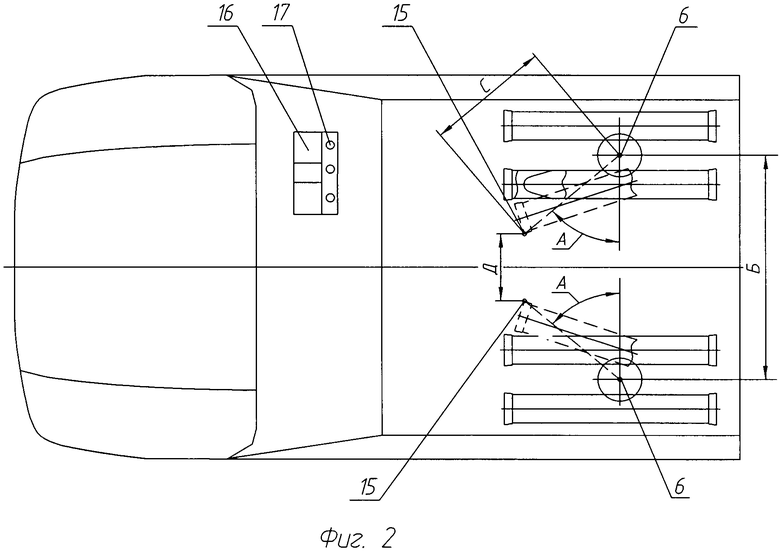
Фиг. 2 изображен вид на комплекс сверху и схема определения углов наведения при одновременной стрельбе.
Многоцелевой ракетный комплекс (фиг. 1) содержит носитель малой грузоподъемности 1, установленные на нем правое 2 и левое 3 устройства наведения с подъемными 4 и поворотными частями 5 с осями 6. На подъемных частях закреплены приборы 7 с каналами наведения 8 и направляющие 9 с установленными на них управляемыми ракетами 10. На корпусе носителя 1 установлены механизмы перевода в боевое и походное положения 11, на которых своими поворотными частями 5 закреплены устройства наведения 2 и 3. Углы их поворота в режиме одновременной стрельбы ограничены углом А, определяемым из соотношения: А=arc cos x,
где cos х=(Б-Д)/2С;
Б - длина интервала между осями 6 поворотных частей, мм;
С - длина радиуса от оси 6 до наиболее удаленной точки 14 управляемой ракеты 10, мм;
Д - минимальное расстояние между точками 14 управляемых ракет при перекрестной стрельбе, мм.
Поворотные части 5 снабжены сенсорами углов наведения 12, соединенными каналами связи 13 с устройством управления вооружением 14, в памяти которого заложена величина угла А. В режиме одновременной стрельбы углы поворота 1, снятые с сенсоров 12, сравниваются в устройстве управления вооружением с углом А и при их совпадении вышеуказанное устройство ограничивает перемещение поворотных частей 5. Устройства наведения установлены на носителе с интервалом Б между осями 6 поворотных механизмов (Фиг. 2). Фоноцелевая обстановка отображается на дисплее 16 пульта оператора 17.
Боевая работа многоцелевого ракетного комплекса производится следующим образом. В зависимости от боевой обстановки в боевое положение приводится либо одно, либо одновременно два устройства наведения. Оператор осуществляет поиск целей, при этом фоноцелевая обстановка отображается на дисплее пульта оператора. При обнаружении одной или нескольких целей на дальности до 10000 м оператор принимает решение об атаке и выбирает режим наведения. В режиме полуавтоматического наведения оператор совмещает прицельную марку с целью, производит выстрел и удерживает марку на центре цели до ее поражения. В автоматическом режиме оператор совмещает прицельную марку с целью и включает устройство управления вооружением в режим автосопровождения. Автомат сопровождения цели, входящий в состав устройства управления вооружением, удерживает центр своей прицельной рамки на центре цели, а оператор производит пуск и оценивает результаты стрельбы. В режиме двухканальной работы стрельба ведется с двух устройств наведения по двум разным целям с последовательным пуском ракет. Оператор совмещает прицельную марку с целью, переводит одно устройство наведения в режим автосопровождения, производит пуск управляемой ракеты, а затем переводит второе устройство наведения в режим автосопровождения и производит пуск второй управляемой ракеты. Автомат сопровождения цели удерживает прицельные рамки на центрах целей до попадания ракет в цель. В этом случае допускается работа одного устройства наведения в автоматическом, а второго - в полуавтоматическом режиме.
Во всех вышеуказанных режимах обеспечивается стрельба «залпом» двумя ракетами в одном информационном луче канала наведения, что обеспечивает повышенную вероятность поражения наиболее опасных целей. В боевом положении может находится до восьми управляемых ракет, готовых к стрельбе, что позволяет производить интенсивную стрельбу без перезарядки.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОСИМЫЙ ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2010 |
|
RU2415366C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ РАКЕТ И СПОСОБ ПРИВЕДЕНИЯ ЕЕ В ПОХОДНОЕ ПОЛОЖЕНИЕ | 2005 |
|
RU2305248C1 |
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2559372C1 |
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2013 |
|
RU2531421C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ ЛАЗЕРА, И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569045C1 |
| ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2013 |
|
RU2540152C2 |
| Тренажер для подготовки операторов управляемого вооружения | 2014 |
|
RU2607428C2 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ ПРИ ОХРАНЕ ОБЪЕКТА | 2009 |
|
RU2428648C2 |
Изобретение относится к военной технике и может быть использовано в ракетных комплексах. Многоцелевой ракетный комплекс содержит носитель с правым и левым устройствами наведения с подъемными и поворотными частями, подъемные части с приборами с каналами наведения, направляющие с двумя управляемыми ракетами, механизмы перевода в боевое и походное положения, устройство управления вооружением. Поворотные части выполнены с обеспечением ограничения углов поворота, зависящих от длины интервала между осями поворотных частей, длины радиуса от оси поворотной части до наиболее удаленной точки управляемой ракеты и минимального расстояния между управляемыми ракетами в режиме одновременной стрельбы с правого и левого устройств наведения. Изобретение позволяет повысить огневую производительность и обеспечить размещение на широком спектре носителей малой грузоподъёмности. 2 з.п. ф-лы, 2 ил.
1. Многоцелевой ракетный комплекс, содержащий носитель, установленные на нем с интервалом правое и левое устройства наведения с подъемными и поворотными частями, закрепленные на подъемных частях приборы с каналами наведения, направляющие с установленными в них управляемыми ракетами, механизмы перевода в боевое и походное положения, устройство управления вооружением, обеспечивающее различные режимы стрельбы, отличающийся тем, что направляющие с установленными в них управляемыми ракетами закреплены на подъемных частях правого и левого устройств наведения, поворотные части которых закреплены на механизмах перевода в боевое и походное положения, причем поворотные части выполнены с обеспечением ограничения углов поворота в режиме одновременной стрельбы с правого и левого устройств наведения.
2. Многоцелевой ракетный комплекс по п. 1, отличающийся тем, что углы поворота А при одновременной стрельбе определяются из соотношения: А=arc cos x,
где cos x=(Б-Д)/2С;
Б - длина интервала между осями поворотных частей, мм;
С - длина радиуса от оси поворотной части до наиболее удаленной точки управляемой ракеты, мм;
Д - минимальное расстояние между управляемыми ракетами при одновременной стрельбе, мм.
3. Многоцелевой ракетный комплекс по п. 1 или 2, отличающийся тем, что направляющие правого и левого устройств наведения выполнены с обеспечением размещения на них не менее двух управляемых ракет.
| Способ и гидравлический горизонтальный пресс двойного действия для выжимания сока из плодов и овощей | 1934 |
|
SU41852A1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| US 2960009 A1, 15.11.1960 | |||
| US 3045552 A1, 24.07.1962. | |||

