Изобретение относится к области авиационной техники и касается создания беспилотных винтокрылов с перекрещивающимися винтами, движительной системой и распределенной тягой поперечных винтов в несущей схеме Х2+2, снабженной парой разновеликих из них винтов на каждом поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного обтекателя на законцовке крыла и имеющим при виде сбоку редуктор с V-образными валами в обтекателях для меньшего и большего винтов, отклоняемых параллельно оси симметрии от вертикали как вперед и обратно, так и только вперед соответственно для выполнения как вертикального взлета/посадки (ВВП), так короткого взлета/посадки (КВП).
Известен беспилотный конвертоплан мод. "Eagle Eye" (США), представляющий собой моноплан со среднерасположенным крылом обратной стреловидности и на концах его консолей смонтированы редукторы с тянущими винтами, установленными в поворотных гондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, имеющий в центре фюзеляжа двигатель и главный редуктор с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности между поворотными винтами, двухкилевое оперение и убирающееся в носовой и кормовой отсеки фюзеляжа шасси велосипедной схемы со вспомогательными колесами на концах поворотных гондол.
Признаки, совпадающие - наличие поворотных гондол с поперечными винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота винтов от 0° до +97,5°, систему трансмиссии с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности силовой установки между поворотными винтами, шасси велосипедной схемы со вспомогательными колесами на концах поворотных гондол.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение на концах крыла поворотных гондол с редукторами и винтами предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой поворота винтов и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что диаметры двух винтов ограничены размахом консолей крыла и как, следствие, при висении поток от винтов, обдувая консоли крыла и создавая значительную общую потерю (почти 23%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает один газотурбинный двигатель и, тем самым, снижает надежность крейсерского полета при его отказе. Четвертая - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота гондол, взлетать и садиться «по-самолетному», как обычный самолет, этот беспилотный конвертоплан не может, так как радиус его поворотных винтов гораздо больше высоты установки гондол на концах крыла и тем более шасси велосипедной схемы имеет вспомогательные колеса на концах гондол, которые могут использоваться только при выполнении ВВП, что также исключает возможность выполнения и КВП. Все это ограничивает увеличения взлетного веса, полезной нагрузки и весовой отдачи, но и улучшения показателей наработки на отказ и безотказности.
Известен беспилотный электрический вертолет-самолет модели "Panther" (Израиль), содержащий моноплан двухбалочной схемы с высокорасположенным прямым свободнонесущим крылом, двухкилевое П-образное хвостовое оперение, смонтированное на разнесенных балках к консолям крыла и снабженное прямым стабилизатором, короткий фюзеляж, силовую установку (СУ), включающую два передних поворотных и один задний стационарный электромоторы с тянущими винтами, смонтированные соответственно в передних окончаниях разнесенных балок и на конце короткого фюзеляжа, трехстоечное колесное шасси, неубирающееся с передней опорой.
Признаки, совпадающие - наличие моноплана двухбалочной схемы с трехколесным шасси и передней опорой. Разнесенные балки соединяют крыло с двухкилевым П-образным хвостовым оперением. Поперечно-продольной системой управляют три электромотора с винтами, два из которых поворотные установлены спереди разнесенных балок. Беспилотный электрический вертолет-самолет (БЭВС) "Panther" может подниматься на высоту до 3,5 км, находится в воздухе до 6 часов и действовать в радиусе до 60 км от оператора при длительных полетах днем и ночью для телевизионного или инфракрасного наблюдения местности и целей на ней в реальном масштабе времени. БЭВС является тактическим разведывательным летающим аппаратом, сочетающим в себе преимущества и вертолета, и самолета. БЭВС располагает поворотными электромоторами с тянущими винтами и, как вертолет, способен по командно-телеметрической радиолинии совершать вертикальный взлет, посадку и зависание.
Причины, препятствующие поставленной задаче: первая - это то, что БЭВС трехвинтовой несущей схемы с задним винтом на конце короткого фюзеляжа, используемым только на вертолетных режимах полета, имеет повышенное аэродинамическое сопротивление на самолетных режимах полета, сложную схему управления электромоторами при независимом вращении трех винтов на вертолетных режимах полета, малую весовую отдачу и радиус действия. Вторая - это то, что при висении поток от двух передних и одного заднего тянущих винтов, обдувая соответственно крыло от его носка и кормовую часть фюзеляжа, создают значительную общую потерю (порядка 14%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что расположение в передних окончаниях разнесенных балок поворотных электромоторов с тянущими винтами предопределяет конструктивно сложное прямое крыло, оснащенное мощными системами их поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Четвертая - это то, что диапазон высот применения БЭВС - 100…3500 м при взлетном его весе 65 кг. Все это, в конечном итоге, ограничивает возможность дальнейшего повышения скорости и дальности полета, а также показателей транспортной и топливной эффективности.
Наиболее близким к предлагаемому изобретению является беспилотный вертолет модели "К-МАХ" компании «Kaman Aerospace» (США), выполненный с перекрещивающимися двухлопастными винтами, имеет на верхней части фюзеляжа двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах, наклоненных от плоскости симметрии влево и право и закрытых обтекателями, содержит вертикальное оперение, имеющее на конце стабилизатора кили, и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - вертолет, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных со значительным перекрытием с небольшим наклоном осей вращения от вертикали. Наклон осей вращения двухлопастных винтов в поперечной плоскости наружу и синхронизация их вращения обеспечивает безопасное прохождение лопастей одного несущего винта над втулкой другого. Втулки несущих винтов имеют упрощенную конструкцию с общим горизонтальным шарниром. Турбовальный двигатель Lycoming T53-L-17A мощностью 1350 л.с. установлен сверху фюзеляжа, между несущими винтами за главным редуктором. Трансмиссия включает главный редуктор, от которого обеспечивается привод обоих перекрещивающихся несущих винтов. Беспилотный вертолет модели "К-МАХ", имеющий диаметр несущих винтов: 14,73 м, длину фюзеляжа: 12,73 м, высоту: 4,14 м, взлетный вес: 5443 кг при весе пустого: 2334 кг, максимальную/крейсерскую скорость полета: 193/185 км/ч, практический потолок: 7010 м и дальность полета: 494 км, может использоваться в специальной авиации как «летающий кран» для транспортировки грузов (массой до 2404 кг при массе топлива 705 кг) на внешней подвеске.
Причины, препятствующие поставленной задаче: первая - это то, что управление по тангажу и крену вертолета с перекрещивающимися несущими винтами изменяемого шага и с управлением циклического их шага значительно осложняет конструкцию, имеют большой объем регламентных работ и является дорогими в эксплуатации, а постоянные вибрации, возникающие при работе автоматов их перекоса, создают неблагоприятные условия для работы других механизмов и оборудования и, особенно, когда лопасти несущих винтов наклоняются в точках перекрещивания вперед или назад, влево или вправо одновременно. Путевое управление осуществляется путем изменения дифференциального общего их шага. Вторая - это то, что в вертолете с перекрещивающимися несущими винтами имеет место большая масса хвостовой удлиненной балки и хвостового оперения с развитым вертикальным оперением и стабилизатором с концевыми дополнительными киль-шабами, что увеличивает массу планера и, как следствие, предопределяет малую весовую отдачу. Третья - это то, что хвостовое оперение не имеют поверхностей управления по крену, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущих винтов с автоматами их перекосов, что ограничивает стабильность поперечно-продольной управляемости и возможность повышения скорости горизонтального поступательного полета и, особенно, с несущими винтами большего диаметра до 14,73 м. Четвертая - это то, что в вертолете двухвинтовой поперечной схемы из-за перекрещивания плоскостей вращения несущих винтов, а значит сложения подъемных сил в месте их перекрещивания, возникает момент кабрирования, то есть подъема носовой части, а его однодвигательная СУ уменьшает и безопасность. Кроме того, перекрещивающиеся несущие винты, смонтированные на длинных валах, наклоненных на углы 15° от плоскости симметрии в каждую сторону и на 5° вперед по полету, что не полностью компенсирует реактивные моменты несущих винтов в этой схеме на главном редукторе вертолета. Поэтому незначительные моменты по тангажу и курсу компенсируется системой управления. Кроме того, несущие винты не могут наклоняться вперед и назад так, чтобы исключать эффекты вследствие изменений в пространственном положении фюзеляжа, которые весьма ухудшают летно-технические характеристики вертолета, благодаря увеличения аэродинамического сопротивления.
Предлагаемым изобретением решается задача в указанном выше известном беспилотном вертолете модели "К-МАХ" повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения поперечной и продольной управляемости, повышения показателей транспортной эффективности, но и скорости, высоты и дальности полета посредством уменьшением диаметра винтов и их наклона для увеличения пропульсивной тяги.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного вертолета модели "К-МАХ", наиболее близкого к нему, являются наличие того, что он выполнен с движительной системой и по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных по схеме РТПВ-Х2+2 и в двух поперечных двухвинтовых модулях на концах крыла, имеющих разновеликие из них винты, установленные на каждом поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного обтекателя на законцовке крыла и снабженном редуктором винтов с верхним расположением V-образных выходных валов, имеющих как бы в V-образном редукторе при виде сбоку соответствующий угол между их осей вращения равный 30° и обеспечивающих размещение меньшего и большего винтов над крылом в верхней полусфере соответственно от вертикали в первом и втором квадрантах и возможность их отклонения параллельно плоскости симметрии вперед и обратно таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая меньший и больший винты в первом квадранте, соответственно для выполнения как вертикального взлета/посадки (ВВП), так и короткого взлета/посадки (КВП) с обеспечением необходимого и достаточного вклада в подъемные и тяговые усилия дисками каждого меньшего и большего несущего винта, наклоняемыми совместно только к передней части фюзеляжа, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию пятивинтового винтокрыла или крылатого автожира, имеющего отклоненные от вертикали вперед по полету оси вращения меньшего и большего несущего винтов каждого V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13° , но и толкающий винт движительной системы с независимым его вращением только при скоростном горизонтальном полете и задним расположением на конце хвостовой балки за развитым стреловидным U-образным хвостовым оперением, имеющим как рулевые поверхности, обеспечивающие их синфазное и дифференциальное отклонение, так и размах спрямленного участка задней кромки, размещенного в плане перпендикулярно плоскости симметрии, и концевые части которого соответственно больше диаметра заднего толкающего винта и ограничивают подход к нему с боковых сторон, обеспечивающего меньшими и большими винтами соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета с достижением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 3,5% или 15% больше от нормального взлетного веса при вращающихся с отклоненными вперед по полету несущими винтами соответственно на режимах авторотации или близком к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 47,5% или 75% от взлетной мощности силовой установки, 31,66% мощности из которых перераспределяется через кормовой выходной вал главного редуктора на задний толкающий винт, а остальные из 47,5% или 75% мощности перераспределяются через главный и соответствующий V-образный редукторы на несущие винты левой и правой группы, но и обратно, при этом в каждом двухвинтовом модуле, включающем несущие меньший и больший винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения: d=0,7065×D, м (где: d и D - диаметры меньшего и большего несущих винтов в левом и правом двухвинтовом модуле соответственно), имеют при выполнении ВВП оси вращения как меньших винтов, отклоненные вперед по полету от вертикальной оси соответствующих V-образных редукторов, разнесенных от оси симметрии на расстоянии, определяемым из соотношения: L=D+0,95bф, м (где: L - межосевое расстояние между двухвинтовых модулей, D - диаметр большего несущего винта, bф -ширина фюзеляжа) и обеспечивающим при этом вращение левого и правого как меньших несущих винтов без соприкосновения с соответствующими бортами фюзеляжа, так и больших несущих винтов, отклоненными от осей вращения меньших винтов назад по полету, выполненными с возможностью свободного их вращения и прохождения наступающих их лопастей над фюзеляжем и тем самым, создающих при выполнении ВВП и зависания гармоничное сочетание поперечного и путевого управления, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в меньшей, так и большей группе винтов, но и одинакового их вращения между разновеликими винтами диагонально расположенной группы винтов, например, при виде с верху по часовой стрелке и против соответственно между винтами левым меньшим с правым большим и между правым меньшим с большим левым винтами, размещенными в плане с соответствующими их лопастями параллельно и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов бортов фюзеляжа и консолей высокорасположенного крыла обратной стреловидности (КОС), причем разрезное КОС, представляющее собой комбинацию двух с близким расположением друг к другу крыльев, смонтированных уступом с первым крылом выше второго при отрицательной деградации первого ко второму по углу атаки, при этом консоли первого и второго крыльев, являющиеся составными частями разрезного КОС, выполнены по всему размаху соответственно с предкрылком и в виде цельно-поворотных секций, смонтированы их законцовками соответственно по середине и снизу каплевидного обтекателя и имеют как корневые хорды в  раза соответственно меньше и больше их концевых хорд, так и возможность отклонения цельно-поворотных его секций на углы 20° , 40° и 75° , но и преобразующих при максимальном их отклонении разрезное КОС как бы в крыло с консолями "обратного сужения", создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы разрезного КОС и несущей его способности, особенно, при поочередной обдуве его консолей несущими меньшими и большими винтами, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем мощность двигателей, перераспределяемая V-образными редукторами на меньшие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в левой и правой их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними), система трансмиссии, включающая наряду с синхронизирующим многоуровневым главным редуктором, имеющим в направлении полета два нижних V-образных в плане выходных вала для передачи крутящего момента, например, от газотурбинных двигателей (ГТД) к левой и правой группе несущих винтов, снабжен на нижнем уровне третьим выходным продольным удлиненным валом, образующим как бы Y-образную в плане трансмиссию валов и соединенным через муфту сцепления с задним редуктором, передающим крутящий момент к толкающему винту, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов, вращающихся на режиме близком к их самовращению, на меньшие винты, выполняющие роль пропульсивных движителей, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть поровну подводить на меньшие винты, а 2/3 ее части - на маршевый толкающий винт и оснащен двумя верхними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя авторотирующими или нагруженными несущими винтами, при этом отклонение предкрылок и закрылок на разрезном КОС выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами при флюгерном положении толкающего винта с одновременным автоматическим ускоренным отклонением вниз как соответствующих предкрылок и закрылок, так и синфазным отклонением вниз рулей высоты U-образного хвостового оперения.
раза соответственно меньше и больше их концевых хорд, так и возможность отклонения цельно-поворотных его секций на углы 20° , 40° и 75° , но и преобразующих при максимальном их отклонении разрезное КОС как бы в крыло с консолями "обратного сужения", создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы разрезного КОС и несущей его способности, особенно, при поочередной обдуве его консолей несущими меньшими и большими винтами, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем мощность двигателей, перераспределяемая V-образными редукторами на меньшие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в левой и правой их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними), система трансмиссии, включающая наряду с синхронизирующим многоуровневым главным редуктором, имеющим в направлении полета два нижних V-образных в плане выходных вала для передачи крутящего момента, например, от газотурбинных двигателей (ГТД) к левой и правой группе несущих винтов, снабжен на нижнем уровне третьим выходным продольным удлиненным валом, образующим как бы Y-образную в плане трансмиссию валов и соединенным через муфту сцепления с задним редуктором, передающим крутящий момент к толкающему винту, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов, вращающихся на режиме близком к их самовращению, на меньшие винты, выполняющие роль пропульсивных движителей, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть поровну подводить на меньшие винты, а 2/3 ее части - на маршевый толкающий винт и оснащен двумя верхними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя авторотирующими или нагруженными несущими винтами, при этом отклонение предкрылок и закрылок на разрезном КОС выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами при флюгерном положении толкающего винта с одновременным автоматическим ускоренным отклонением вниз как соответствующих предкрылок и закрылок, так и синфазным отклонением вниз рулей высоты U-образного хвостового оперения.
Кроме того, с целью упрощения конструкции трансмиссии и уменьшения массы комбинированной силовой установки, толкающий винт которой выполнен в виде спаренных с противоположным вращением выносного винтовентилятора и газодинамическим его привода от упомянутых ГТД, имеющих каждый степень сжатия воздуха (πк) не менее 15,0 в статических условиях в их компрессорах высокого давления, но и систему отбора газа и доставки его потока на привод винтовентилятора, который включает турбину с валом привода винтовентилятора, дополнительную камеру сгорания с регулятор расхода топлива и запалом, центральное тело, канал подвода газа к турбине винтовентилятора, канал отвода газов и топливопровод, который при выполнении КВП используется для подачи топлива в дополнительную камеру сгорания винтовентилятора, затем после короткого взлета в перегрузочном варианте и перехода на поступательный горизонтальный скоростной полет системы подвода топлива перекрываются при одновременном увеличении подвода газа к турбине винтовентилятора от одного из работающих ГТД, отключенного от системы трансмиссии привода несущих винтов и, значит, при таком способе дросселирования доля газа, отбираемого от работающего ГТД на привод винтовентилятора, по мере снижения отбора мощности от взлетной его мощности увеличивается и при больших величинах заданного отбора газа для поддержания заданного значения маршевой тяги винтовентилятора по мере дросселирования режим работы этого ГТД также увеличивается.
Благодаря наличию этих признаков, позволяющих освоить беспилотный винтокрыл с перекрещивающимися винтами (БВПВ), выполненный с движительной системой и по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных по схеме РТПВ-Х2+2 и в двух поперечных двухвинтовых модулях, имеющих в каждом разновеликие меньший и больший из них винты, установленные при виде сбоку на поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного обтекателя на законцовке крыла и имеющим поворотный V-образный редуктор с валами и винтами, имеющими соответствующий угол между их осей вращения равный 30° при размещении меньшего и большего винтов в верхней полусфере соответственно от вертикали в первом и втором квадрантах и отклоняемыми параллельно плоскости симметрии вперед и обратно, таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая меньший и больший винты в первом квадранте, соответственно для выполнения как вертикального взлета/посадки (ВВП), так короткого взлета/посадки (КВП) с обеспечением необходимого и достаточного вклада в подъемные и тяговые усилия дисками каждого меньшего и большего несущего винта, наклоняемыми совместно только к передней части фюзеляжа, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию пятивинтового винтокрыла или крылатого автожира, имеющего отклоненные от вертикали вперед по полету оси вращения меньшего и большего несущего винтов каждого V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13° , но и толкающий винт движительной системы с независимым его вращением только при скоростном горизонтальном полете и задним расположением на конце хвостовой балки за развитым U-образным хвостовым оперением, имеющим как рулевые поверхности, обеспечивающие их синфазное и дифференциальное отклонение, так и размах спрямленного участка задней кромки, размещенного перпендикулярно плоскости симметрии, и концевые части которого соответственно больше диаметра заднего толкающего винта и ограничивают подход к нему с боковых сторон, обеспечивающего меньшими и большими винтами соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета с достижением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 3,5% или 15% больше от нормального взлетного веса при вращающихся с отклоненными вперед по полету несущими винтами соответственно на режимах авторотации или близком к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 47,5% или 75% от взлетной мощности силовой установки, 31,66% мощности из которых перераспределяется через кормовой выходной вал главного редуктора на задний толкающий винт, а остальные из 47,5% или 75% мощности перераспределяются через главный и соответствующий V-образный редукторы на несущие винты левой и правой группы, но и обратно. В каждом двухвинтовом модуле, включающем несущие меньший и больший винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения: d=0,7065×D, м (где: d и D - диаметры меньшего и большего несущих винтов в левом и правом двухвинтовом модуле соответственно), имеют при выполнении ВВП оси вращения как меньших винтов, отклоненные вперед по полету от вертикальной оси соответствующих V-образных редукторов, разнесенных от оси симметрии на расстоянии, определяемым из соотношения: L=D+0,95bф, м (где: L - межосевое расстояние между двухвинтовых модулей, D - диаметр большего несущего винта, bф - ширина фюзеляжа) и обеспечивающим при этом вращение левого и правого как меньших несущих винтов без соприкосновения с соответствующими бортами фюзеляжа, так и больших несущих винтов, отклоненными от осей вращения меньших винтов назад по полету, выполненными с возможностью свободного их вращения и прохождения наступающих их лопастей над фюзеляжем.
Система трансмиссии, включающая наряду с синхронизирующим многоуровневым главным редуктором, имеющим в направлении полета два нижних V-образных в плане выходных вала для передачи крутящего момента, например, от ГТД к левой и правой группе несущих винтов, снабжен на нижнем уровне третьим выходным продольным удлиненным валом, образующим как бы Y-образную в плане трансмиссию валов и соединенным через муфту сцепления с задним редуктором, передающим крутящий момент к толкающему винту, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов, вращающихся на режиме близком к их самовращению, на меньшие винты, выполняющие роль пропульсивных движителей, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть поровну подводить на меньшие винты, а 2/3 ее части - на маршевый толкающий винт и оснащен двумя верхними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя авторотирующими или нагруженными несущими винтами. При авторотации или на режимах близком к самовращению несущих винтов срыв потока на перекрещивающихся их лопастях отодвигается на более высокие скорости полета, что позволит из-за аэродинамической симметрии относительно центра масс исключить потерю подъемной силы из-за срыва потока с отступающих их лопастей на режиме горизонтального полета и, как следствие, достичь скорости полета 450 или 420 км/ч соответственно. Все это позволит повысить скороподъемность, высоту и дальность полета БВПВ со схемой перекрещивающихся несущих разновеликих винтов, являющейся наиболее эффективной многовинтовой схемой при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание, а также повысить безопасность. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно, коммерческого турбовинтовентиляторного винтокрыла с перекрещивающимися винтами (ТВПВ).
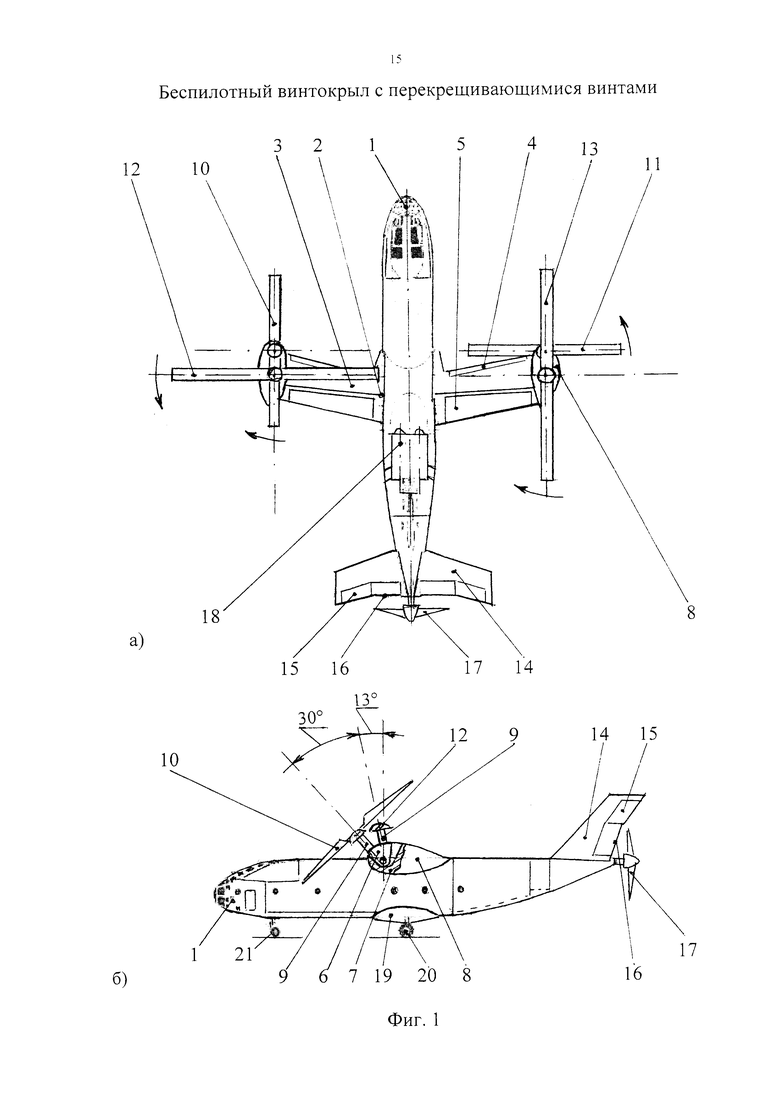
Предлагаемое изобретение в условиях различной полетной конфигурации БВПВ исполнения РТПВ-Х2+2 иллюстрируется общими видами, представленными на фиг. 1.
На фиг. 1 изображен многоцелевой БВПВ на общих видах сверху и сбоку соответственно а) и б) с расположением на конце хвостовой балки толкающего винта, но и на законцовках разрезного КОС двух V-образных редукторов с двумя валами в обтекателях и разновеликими двухлопастными меньшими и большими винтами:
а) в полетной конфигурации вертолета четырехвинтовой несущей схемы РТПВ-Х2+2, несущие винты которой при виде с верху имеют вращение по часовой стрелке и против соответственно между винтами левым меньшим с правым большим и между правым меньшим с большим левым винтами, размещенными в плане с соответствующими их лопастями параллельно и перпендикулярно оси симметрии;
б) в полетной конфигурации пятивинтового винтокрыла с четырехвинтовой движительно-несущей системой для создания как пропульсивной тяги совместно с маршевой горизонтальной тягой, обеспечиваемой задним толкающим винтом, так и подъемные усилия совместно с подъемной силой высокорасположенного разрезного КОС.
Многоцелевой БВПВ, представленный на фиг. 1 и снабженный движительной системой, выполнен по концепции РТПВ-Х2+2, содержит фюзеляж 1 и умеренного удлинения высокорасположенное разрезное КОС 2 (см. фиг. 1a), которое включает первое крыло 3 «обратного сужения», имеющее по всему размаху предкрылки 4 и второе цельно-поворотное крыло 5. На каждом конце разрезного КОС 2 имеется поворотный сектор-пилон 6, смонтированный в переднем продольном секторном проеме 7 каплевидного обтекателя 8 и имеющий V-образный редуктор с двумя валами в обтекателях 9 как с меньшими левым 10 и правым 11, так и с большими левым 12 и правым 13 несущими винтами, отклоняемыми параллельно оси симметрии от вертикали и вперед к носовой части фюзеляжа 1, и обратно (см. фиг. 1б). При этом стреловидное U-образное хвостовое оперение 14, имеющее рулевые поверхности 15, отклоняемые как синфазно, так и дифференциально, содержит спрямленный участок 16 задней его кромки, обеспечивающий свободное вращение заднего толкающего винта 17. Несущая система размещена в двухвинтовых модулях поперечной четырехвинтовой схемы РТПВ-Х2+2, имеющей в левой 10-12 и правой 11-3 группе несущих винтов, каждая пара из которых установлена в соответствующих редукторах при виде сбоку на удлиненных V-образных выходных валах в обтекателях 9, имеющих соответствующий угол между их осей вращения равный 30° . Во время аварийной посадки на режиме авторотации четырех перекрещивающихся несущих винтов левой 10-12 и правой 11-13 их группе для разгрузки разрезного КОС 2 отклоняются его предкрылки 4, а второе цельно-поворотное крыло 5 при этом автоматически отклоняется на углы 20° или 47° в зависимости от скорости снижения, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на угол 75°. На вертолетных режимах полета в несущей системе между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в левой 10-12, так и правой 11-13 группе винтов, но и одинакового их вращения между разновеликими диагонально расположенными несущими винтами, например, при виде с верху по часовой стрелке и против соответственно между винтами левым 10 меньшим с правым 13 большим и между правым 11 меньшим с большим 12 левым винтами, размещенными в плане с соответствующими их лопастями параллельно и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов бортов фюзеляжа 1 и консолей разрезного КОС 2.
Турбовинтовая СУ, состоящая из двух мотогондол 18, в каждой из которых имеется, например, ГТД, выполненные для отбора их взлетной их мощности с передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтами свободного хода и сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность двух ГТД, обеспечивающая продолжение полета при одном работающем двигателе, так как все несущие винты и задний толкающий винт имели независимые приводы. При этом система управления двигателей с трансмиссией обеспечивает плавное перераспределение их мощности при переходе в режим крейсерского полета с несущих винтов на задний толкающий винт (на несущие винты при переходных режимах полета подается 15,84% крутящего момента, допускаются режимы как близкий к их самовращению, так и их авторотация для аварийной посадки), но и уменьшение подводимой мощности от двигателей до 47,5% располагаемой взлетной мощности СУ, 2/3 части которой было достаточно для привода толкающего винта 17 при скоростном полете. Последнее предопределяет и существенно меньший расход топлива и, следовательно, большой радиус действия БВПВ. Передача взлетной мощности от двух ГТД к левой 10-12 и правой 11-13 группе несущих винтов обеспечивается элементами трансмиссии, включающей: синхронизирующий многоуровневый главный редуктором, имеющий как два нижних выходных вала с соединительными валами, проложенными в консолях КОС 2, и один продольный удлиненный выходной вал, образующий как бы Y-образную в плане трансмиссию валов и соединенный через муфту сцепления с задним редуктором толкающего винта 17, так и два верхних входных вала, связанных посредством муфт сцепления с соответствующим ГТД 18 (на фиг. 1 не показаны). Трехопорное убирающееся колесное шасси, главные боковые опоры с колесами 19 убираются в боковые обтекатели 20 фюзеляжа 1, вспомогательная передняя опора с колесами 21 - в носовую нишу фюзеляжа 1.
Управление турбовинтовым БВПВ обеспечивается общим и дифференциальным изменением шага левой 10-12 и правой 11-13 группы несущих винтов и отклонением рулевых поверхностей 15 U-образного хвостового оперения 14, работающих при синфазном и дифференциальном их отклонении в качестве рулей высоты и элеронов соответственно. При крейсерском полете подъемная сила создается разрезным КОС 2 и авторотирующими несущими винтами левой 10-12 и правой 11-13 группы (см. фиг. 1а), пропульсивная и горизонтальная тяга - отклоненными вперед от вертикали несущими левой 10-12 и правой 11-13 совместно с маршевым толкающим винтом 17, на режиме висения только несущими винтами левой 10-12 и правой 11-13 группы, на режиме перехода - разрезным КОС 2 с несущими винтами левой 10-12 и правой 11-13 группы. При переходе к вертикальному взлету-посадке (висению) выполняется отключение от трансмиссии заднего толкающего винта 17 (см. фиг. 1а) и в разрезном КОС 2 его предкрылок 4 и само второе его крыло 5 отклоняются на максимальные их углы синхронно с поворотов несущих винтов левой 10-12 и правой 11-13 группы от наклонного их положения, которые поворачиваясь вверх, совмещают ось симметрии их V-образных редукторов с вертикалью таким образом, что меньшие 10-11 и большие 12-13 несущие винты на обтекателях 9 устанавливаются от вертикали соответственно на углы 15° вперед и назад к соответствующим частям фюзеляжа 1 (см. фиг. 1б) и выполняется технология ВВП или зависание многоцелевого БВПВ. После создания необходимой подъемной тяги несущими винтами левой 10-12 и правой 11-13 группы обеспечиваются вертолетные режимы полета. При его полетной конфигурации вертолета четырехвинтовой несущей схемы реактивные моменты с учетом отклонения вдоль оси симметрии осей вращения несущих винтов меньших 10-11 и больших 12-13 соответственно вперед и назад по полету компенсируются полностью за счет также взаимно противоположного их вращения между винтами как в соответствующих группах, так и между равновеликими несущими винтами левой и правой групп, например, между большим левым 12 и большим правым 13 и т.п. (см. фиг. 1а).
При висении на вертолетных режимах полета продольное управление БВПВ осуществляется изменением шага несущих винтов передних меньших 10-11 и задних больших 12-13, путевое управление - соответствующим дифференциальным изменением крутящих моментов диагонально расположенных 10-13 и 11-12 несущих винтов. Поперечное управление обеспечивается несущими винтами левой 10-12 и правой 11-13 группы, осуществляющими поперечную балансировку при одновременном изменении шага винтов этих групп. После вертикального взлета и набора высоты для перехода на крейсерский режим полета БВПВ выполняется уборка механизации разрезного КОС 2 и подключение к трансмиссии заднего толкающего винта 17, но и поворотные секторы-пилоны 6 с V-образными редукторами несущих винтов меньшей 10-11 и большей 12-13 группы синхронно поворачиваются вперед по полету на углы 28° от вертикали таким образом, что оси вращения указанных несущих винтов отклоняются от вертикали на углы 43° и 13° соответственно (см. фиг. 1б) и обеспечивается его поступательный горизонтальный скоростной полет как крылатого автожира. Для выполнения им технологии КВП в перегрузочном его варианте выполняется подключение к трансмиссии заднего толкающего винта 17 и каждый поворотный сектор-пилон 6 с V-образным редуктором, например, меньшего 10 и большего 12 несущих винтов левой группы РТПВ-Х2+2 поворачивается вперед по полету на угол 20° от вертикали таким образом, что оси вращения указанных несущих винтов отклоняются от вертикали на углы 35° и 5° соответственно (см. фиг. 1б) и обеспечивается поступательный горизонтальный скоростной полет БВПВ в полетной конфигурации пятивинтового винтокрыла, при котором путевое управление обеспечивается рулем направления 15 U-образного хвостового оперения 14. Продольное и поперечное управление БВПВ при горизонтальном его скоростном полете осуществляется синфазным и дифференциальным отклонением рулевых поверхностей 15 соответственно. При этом исключение от продольного и поперечного управления БВПВ и, особенно, поперечного его управления несущих винтов левой 10-12 и правой 11-13 группы не изменит аэродинамической симметрии несущей его системы, что позволит отодвинуть срыв потока на отступающих лопастях несущих винтов на более высокие скорости полета и достичь скорости горизонтального полета 415-450 км/ч.
Таким образом, многоцелевой БВПВ, снабженный задним толкающим винтом, выполнен по концепции распределенной тяги перекрещивающихся винтов, размещенных в двухвинтовых модулях поперечной схемы РТПВ-Х2+2, имеющей две пары разновеликих меньшего и большего несущих винтов. БВПВ снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию пятивинтового винтокрыла, имеющего отклоненные вперед по полету несущие винты двухвинтовой движительно-несущей системы, но и задний толкающий винт с независимым его вращением и задним расположением на конце хвостовой балки за U-образным хвостовым оперением, создающие соответствующими несущими меньшими и большими винтами наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета.
Выбор такой аэродинамической схемы БВПВ не случаен, т.к. подобная компоновка исключает потерю подъемной силы из-за срыва потока с отступающих лопастей несущих двухлопастных разновеликих винтов на режиме горизонтального полета, компенсируя оную их противоположным вращением, и обладает аэродинамической симметрией. Задний толкающий флюгерно-реверсивный винт, создающий маршевую горизонтальную тягу, обеспечивают необходимое как повышение скорости горизонтального полета, так и уменьшение дистанции при посадке с пробегом. Высокорасположенное разрезное КОС находится вблизи центра масс, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать выполнение технологии ВВП и КВП. Поэтому при сравнении с прототипом - беспилотным вертолете модели "К-МАХ" сопоставимый БВПВ имеет на 40% более мощные ГТД с N=950 л.с.×2, а также специальные лопасти несущих винтов. Скорость обычного "К-МАХ" не превышает 185 км/ч при мощности СУ равной N=1350 л.с, с удельной нагрузкой на мощность ρN=4,0 кг/л.с., двумя несущими винтами D=14,73 м и топливной эффективностью 593,64 г/тонн⋅км. У многоцелевого БВПВ с взлетным весом GBЗ=5443 кг скорость составит 415 км/ч при мощности СУ равной N=950 л.с.×2 и удельной нагрузке на мощность ρN=2,86 кг/л.с. с несущими винтами меньшими d=7,36×2 м и большими D=10,42×2 м топливная эффективность составит 406,57 г/тонн⋅км.
Несомненно, с течением времени широкое использование комбинированных взамен турбовинтовых СУ в многоцелевых БВПВ позволит, упрощая конструкцию их трансмиссии, добиться снижения массы самой СУ и повышения топливной эффективности, что немаловажно, особенно, для коммерческих ТВПВ с комбинированной СУ и, особенно, с противоположным вращением спаренного выносного винтовентилятора и газодинамическим его приводом от двух турбовальных ГТД его СУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
Изобретение относится к области авиационной техники и касается создания беспилотных винтокрылов. Беспилотный винтокрыл с перекрещивающимися винтами (БВПВ) выполнен с двухлопастными винтами, имеет на верхней части фюзеляжа двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах, содержит вертикальное оперение и трехопорное убирающееся колесное шасси. БВПВ выполнен с движительной системой по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных по схеме РТПВ-Х2+2 в двух поперечных двухвинтовых модулях на концах крыла. Модули содержат разновеликие винты, установленные на каждом поворотном секторе-пилоне, смонтированном в переднем продольном полукруглом проеме каплевидного обтекателя на законцовке крыла. БВПВ снабжен редуктором с верхним расположением V-образных выходных валов, расположенных под углом 30° между ними. Меньший и больший винты расположены над крылом в верхней полусфере в первом и втором квадрантах и имеют возможность отклонения параллельно плоскости симметрии вперед и назад. Достигается увеличение весовой отдачи, уменьшение потребной мощности на путевую балансировку при висении и улучшение поперечной и продольной управляемости. 1 з.п. ф-лы, 1 ил.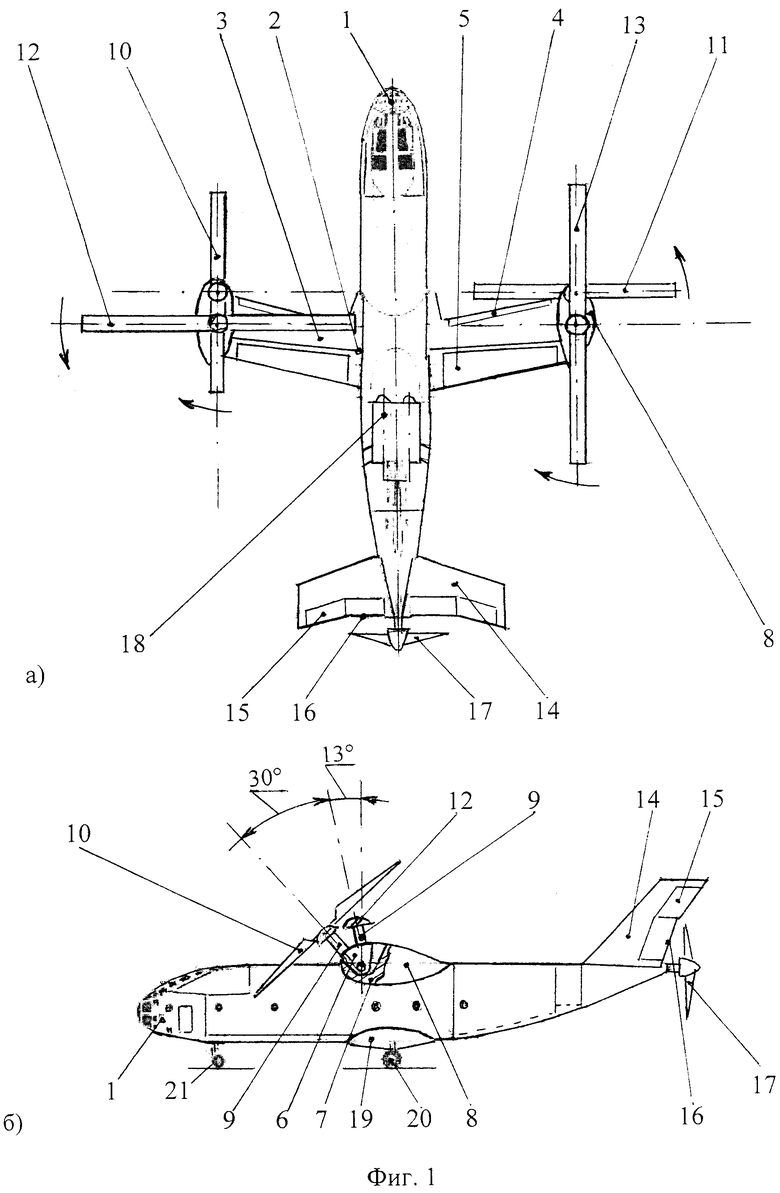
1. Беспилотный винтокрыл с перекрещивающимися винтами, выполненный с перекрещивающимися двухлопастными винтами, имеет на верхней части фюзеляжа двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах, закрытых обтекателями, содержит вертикальное оперение и трехопорное убирающееся колесное шасси, отличающийся тем, что он выполнен с движительной системой и по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных по схеме РТПВ-Х2+2 и в двух поперечных двухвинтовых модулях на концах крыла, имеющих разновеликие из них винты, установленные на каждом поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного обтекателя на законцовке крыла и снабженном редуктором винтов с верхним расположением V-образных выходных валов, имеющих как бы в V-образном редукторе при виде сбоку соответствующий угол между их осей вращения, равный 30°, и обеспечивающих размещение меньшего и большего винтов над крылом в верхней полусфере соответственно от вертикали в первом и втором квадрантах и возможность их отклонения параллельно плоскости симметрии вперед и обратно таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая меньший и больший винты в первом квадранте, соответственно для выполнения как вертикального взлета/посадки (ВВП), так и короткого взлета/посадки (КВП) с обеспечением необходимого и достаточного вклада в подъемные и тяговые усилия дисками каждого меньшего и большего несущих винтов, наклоняемыми совместно только к передней части фюзеляжа, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию пятивинтового винтокрыла или крылатого автожира, имеющего отклоненные от вертикали вперед по полету оси вращения меньшего и большего несущего винтов каждого V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13°, но и толкающий винт движительной системы с независимым его вращением только при скоростном горизонтальном полете и задним расположением на конце хвостовой балки за развитым стреловидным U-образным хвостовым оперением, имеющим как рулевые поверхности, обеспечивающие их синфазное и дифференциальное отклонение, так и размах спрямленного участка задней кромки, размещенного в плане перпендикулярно плоскости симметрии, и концевые части которого соответственно больше диаметра заднего толкающего винта и ограничивают подход к нему с боковых сторон, обеспечивающего меньшими и большими винтами соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета, с достижением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 3,5% или 15% больше от нормального взлетного веса при вращающихся с отклоненными вперед по полету несущими винтами соответственно на режимах авторотации или близком к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 47,5% или 75% от взлетной мощности силовой установки, 31,66% мощности из которых перераспределяется через кормовой выходной вал главного редуктора на задний толкающий винт, а остальные из 47,5% или 75% мощности перераспределяются через главный и соответствующий V-образный редукторы на несущие винты левой и правой группы, но и обратно, при этом в каждом двухвинтовом модуле, включающем несущие меньший и больший винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения: d=0,7065.D, м (где: d и D – диаметры меньшего и большего несущих винтов в левом и правом двухвинтовом модуле соответственно), имеют при выполнении ВВП оси вращения как меньших винтов, отклоненные вперед по полету от вертикальной оси соответствующих V-образных редукторов, разнесенных от оси симметрии на расстоянии, определяемым из соотношения: L=D+0,95bф, м (где: L - межосевое расстояние между двухвинтовых модулей, D – диаметр большего несущего винта, bф - ширина фюзеляжа) и обеспечивающим при этом вращение левого и правого как меньших несущих винтов без соприкосновения с соответствующими бортами фюзеляжа, так и больших несущих винтов, отклоненными от осей вращения меньших винтов назад по полету, выполненными с возможностью свободного их вращения и прохождения наступающих их лопастей над фюзеляжем и тем самым создающих при выполнении ВВП и зависания гармоничное сочетание поперечного и путевого управления, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в меньшей, так и большей группе винтов, но и одинакового их вращения между разновеликими винтами диагонально расположенной группы винтов, например, при виде с верху по часовой стрелке и против соответственно между винтами левым меньшим с правым большим и между правым меньшим с большим левым винтами, размещенными в плане с соответствующими их лопастями параллельно и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов бортов фюзеляжа и консолей высокорасположенного крыла обратной стреловидности (КОС), причем разрезное КОС, представляющее собой комбинацию двух с близким расположением друг к другу крыльев, смонтированных уступом с первым крылом выше второго при отрицательной деградации первого ко второму по углу атаки, при этом консоли первого и второго крыльев, являющиеся составными частями разрезного КОС, выполнены по всему размаху соответственно с предкрылком и в виде цельно-поворотных секций, смонтированы их законцовками соответственно по середине и снизу каплевидного обтекателя и имеют как корневые хорды в раза соответственно меньше и больше их концевых хорд, так и возможность отклонения цельно-поворотных его секций на углы 20°, 40° и 75°, но и преобразующих при максимальном их отклонении разрезное КОС как бы в крыло с консолями "обратного сужения", создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы разрезного КОС и несущей его способности, особенно при поочередном обдуве его консолей несущими меньшими и большими винтами, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем мощность двигателей, перераспределяемая V-образными редукторами на меньшие винты, определяется из соотношения: N=0,7065n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в левой и правой их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними), система трансмиссии, включающая наряду с синхронизирующим многоуровневым главным редуктором, имеющим в направлении полета два нижних V-образных в плане выходных вала для передачи крутящего момента, например, от газотурбинных двигателей (ГТД) к левой и правой группе несущих винтов, снабжен на нижнем уровне третьим выходным продольным удлиненным валом, образующим как бы Y-образную в плане трансмиссию валов и соединенным через муфту сцепления с задним редуктором, передающим крутящий момент к толкающему винту, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов, вращающихся на режиме, близком к их самовращению, на меньшие винты, выполняющие роль пропульсивных движителей, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть поровну подводить на меньшие винты, а 2/3 ее части - на маршевый толкающий винт, и оснащен двумя верхними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя авторотирующими или нагруженными несущими винтами, при этом отклонение предкрылок и закрылок на разрезном КОС выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами при флюгерном положении толкающего винта с одновременным автоматическим ускоренным отклонением вниз как соответствующих предкрылок и закрылок, так и синфазным отклонением вниз рулей высоты U-образного хвостового оперения.
2. Беспилотный винтокрыл с перекрещивающимися винтами по п. 1, отличающийся тем, что с целью упрощения конструкции трансмиссии и уменьшения массы комбинированной силовой установки толкающий винт выполнен в виде спаренных с противоположным вращением выносного винтовентилятора и газодинамическим его приводом от упомянутых ГТД, имеющих каждый степень сжатия воздуха (πк) не менее 15,0 в статических условиях в их компрессорах высокого давления, но и систему отбора газа и доставки его потока на привод винтовентилятора, который включает турбину с валом привода винтовентилятора, дополнительную камеру сгорания с регулятором расхода топлива и запалом, центральное тело, канал подвода газа к турбине винтовентилятора, канал отвода газов и топливопровод.
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| Способ получения безводного хлористого алюминия | 1960 |
|
SU146301A1 |
| СИСТЕМА И КОМПОНЕНТЫ СТРЕЛЯЮЩЕГО ПЕРФОРАТОРА | 2014 |
|
RU2659934C2 |
| US 2891741 A, 23.06.1959. | |||

