Изобретение относится к области авиационной техники и касается создания многовинтовых беспилотных скоростных вертолетов, снабженных задним толкающим винтом и системой распределенной тяги перекрещивающихся винтов в продольной несущей схеме Х2+2, имеющей разновеликие как большой и меньший из них на переднем пилоне, так и меньший и большой на вертикальном киле, установленные на длинных валах, наклоненных соответственно от вертикали вперед и назад по полету вдоль оси симметрии, и обеспечивающие выполнение вертикального и короткого взлета/посадки (ВВП и КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен легкий вертолет проекта RUMAS-50 российско-чешской компании «RUMAS group», выполненный по двухвинтовой продольной схеме с задним толкающим винтом, имеет в кормовой части фюзеляжа силовую установку, включающую два двигателя, передающих крутящий момент через главный редуктор и систему валов трансмиссии на задний толкающий винт и несущие передний и задний винты, смонтированные на соответствующих пилонах, содержит вертикальное оперение, смонтированное под хвостовой балкой, оснащенное на конце килевой его поверхности амортизационной стойкой заднего колеса трехопорного шасси, снабженного и главными боковыми опорами с передними неубирающимися колесами в концевых обтекателях низкорасположенного крыла.
Признаки, совпадающие - наличие крыла, хвостового оперения и двух турбовальных двигателей модели АИ-450 мощностью по 465 л.с. каждый, главного редуктора и валов трансмиссии, передающих мощность как двум четырехлопастным несущим винтам, так и шестилопастному толкающему винту, обеспечивающими соответственно как перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет соответственно. Несущие винты предназначены только для создания подъемной силы, поступательное движение в горизонтальной плоскости обеспечивает толкающий винт. Вращение двух несущих и толкающего винтов - синхронизирующее. Взлетная тяговооруженность силовой установки (СУ), позволяющая при продолжительном времени висения иметь целевую нагрузку 750 кг при взлетной его массе 2500 кг. Скоростной вертолет мод. RUMAS-50, имея максимальные скорости полета до 320 км/ч, дальность полета до 750 км и практический потолок 3000 м, может применяться в бизнес-авиации при перевозке 4-5 человек.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет двухвинтовой продольной несущей схемы, оснащенный на конце хвостовой балки маршевым толкающим винтом, используемым только на крейсерских режимах полета, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, большую массу хвостовой балки и валов трансмиссии, малую весовую отдачу и радиус действия. Вторая - это то, что в вертолете двухвинтовой продольной схемы с разновеликими винтами имеет место сложная схема редуцирования при передаче разновеликой мощности СУ на несущие винты и необходимость длинных валов и агрегатов трансмиссии, но и опасность, создаваемая задним толкающим винтом для наземного персонала. Третья - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущих винтов с автоматами их перекосов и при авторотации последних осложняет их использование для продольно-поперечного управления. Четвертая - это то, что вес заднего винта вместе с вертикальным пилоном и агрегатами трансмиссии заднего винта составляет до 12-15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Пятая - это то, что в вертолете двухвинтовой продольной схемы с целью уменьшения длины фюзеляжа несущие передний и задний винты имеют значительное перекрытие до 20-22%. Поэтому с целью уменьшения интерференции и вредного влияния переднего несущего винта на задний, последний размещен на пилоне выше переднего, что приводит к ухудшению весовой отдачи, а из-за интерференции ресурс заднего несущего винта и его редуктора гораздо меньше передних. Все это также повышает удельный расход топлива и ограничивает возможность дальнейшего увеличения скорости и дальности полета, а также показателей транспортной и топливной эффективности, но и выполнения технологии КВП.
Известен экспериментальный скоростной вертолет "Sikorsky Х2" компании Sikorsky (США), выполненный по двухвинтовой схеме с соосными несущими и задним толкающим винтами, имеет силовую установку с турбовальным двигателем, передающим крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущие соосные и задний толкающий винты, последний из которых установлен на конце хвостовой балки за вертикальным двухкилевым оперением, смонтированным на консолях горизонтального оперения, трехопорное убирающееся колесное шасси, с кормовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие двухкилевого оперения, турбовального двигателя модели LHTEC Т800 мощностью 1340 л.с., главного редуктора и валов трансмиссии, передающих мощность четырехлопастным соосным несущим винтам диаметром 8,05 м и шестилопастному толкающему винту диаметром 1,66 м, обеспечивающим как перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет. Вращение несущих соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки, позволяющая при непродолжительном времени висения достигать полезной нагрузки 1000 кг при взлетном его весе 3600 кг. Скоростной вертолет "Sikorsky Х2", имея крейсерскую скорость полета до 463 км/ч, дальность полета до 1300 км и практический потолок 7200 м, может применяться для транспортировки 5…6 человек.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы и с задним толкающим винтом, используемым только на крейсерских режимах полета, что увеличивает паразитную массу при выполнении ВВП и уменьшает весовую отдачу и радиус действия. Вторая - это то, что вес заднего винта вместе с двухкилевым оперением и агрегатами трансмиссии заднего винта составляет до 12-15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Третья - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создают неблагоприятные условия для работы других механизмов и оборудования. Четвертая - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования. Пятая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Все это, в конечном итоге, обеспечивает более высокий удельный расход топлива и ограничивает возможность дальнейшего повышения скорости и дальности полета, а также показателей транспортной и топливной эффективности, но и выполнения технологии КВП.
Наиболее близким к предлагаемому изобретению является беспилотный вертолет модели "K-MAX" компании «Kaman Aerospace» (США), выполненный с перекрещивающимися двухлопастными винтами, имеет на верхней части фюзеляжа турбовальный двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах, наклоненных на углы 15° от вертикали влево и вправо и закрытых обтекателями, содержит вертикальное оперение, имеющее на конце стабилизатора киль-шайбы, и трехопорное неубирающееся колесное шасси.
Признаки, совпадающие - вертолет, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных со значительным перекрытием с небольшим наклоном осей вращения от вертикали. Наклон осей вращения двухлопастных винтов в поперечной плоскости наружу и синхронизация их вращения обеспечивает безопасное прохождение лопастей одного несущего винта над втулкой другого. Втулки несущих винтов имеют упрощенную конструкцию с общим горизонтальным шарниром. Турбовальный двигатель Lycoming T53-L-17A мощностью 1350 л.с. установлен сверху фюзеляжа, между несущими винтами за главным редуктором. Трансмиссия включает главный редуктор, от которого обеспечивается привод обоих перекрещивающихся несущих винтов. Беспилотный вертолет модели "K-MAX", имеющий диаметр несущих винтов: 14,73 м, длину фюзеляжа: 12,73 м, высоту: 4,14 м, взлетный вес: 5443 кг при весе пустого: 2334 кг, максимальную/крейсерскую скорость полета: 193/185 км/ч, практический потолок: 7010 м и дальность полета: 494 км, может использоваться в специальной авиации как «летающий кран» для транспортировки грузов (массой до 2404 кг при массе топлива 705 кг) на внешней подвеске.
Причины, препятствующие поставленной задаче: первая - это то, что управление по тангажу и крену вертолета с перекрещивающимися несущими винтами обеспечивается путем изменения циклического шага лопастей, что создает неблагоприятные условия для работы других механизмов и оборудования и, особенно, когда лопасти несущих винтов наклоняются в точках перекрещивания вперед или назад, влево или вправо одновременно. Путевое управление осуществляется путем изменения дифференциального общего их шага. Вторая - это то, что в вертолете с перекрещивающимися несущими винтами имеет место большая масса хвостовой балки и хвостового оперения с развитым вертикальным оперением и стабилизатором с концевыми дополнительными киль-шайбами, что увеличивает массу планера и, как следствие, предопределяет малую весовую отдачу. Третья - это то, что хвостовое оперение не имеет поверхностей управления по крену, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущих винтов с автоматами их перекосов, что ограничивает стабильность поперечно-продольной управляемости. Четвертая - это то, что в вертолете двухвинтовой поперечной схемы из-за перекрещивания плоскостей вращения несущих винтов, а значит, сложения подъемных сил в месте их перекрещивания возникает момент кабрирования, то есть подъема носовой части, а его однодвигательная СУ уменьшает и безопасность. Кроме того, перекрещивающиеся несущие винты, смонтированные на длинных валах, наклоненных на углы 15° от плоскости симметрии в каждую сторону и на 5° вперед по полету, что не полностью компенсирует реактивные моменты несущих винтов в этой схеме на главном редукторе вертолета. Поэтому незначительные моменты по тангажу и курсу компенсируется рулями высоты и системой управления. Все это также ограничивает возможность дальнейшего увеличения скорости и дальности полета, но и показателей транспортной и топливной эффективности, а также выполнения технологии КВП.
Предлагаемым изобретением решается задача в указанном выше известном беспилотном вертолете модели "K-MAX" увеличения полезной нагрузки, повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения поперечной и продольной управляемости, повышения скорости, высоты и дальности полета, а также показателей транспортной эффективности, но и выполнения технологии КВП и, особенно, КВВП.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного вертолета модели "K-MAX", наиболее близкого к нему, являются наличие того, что он содержит подфюзеляжный киль, образующий со стреловидным стабилизатором, имеющим по задней кромке спрямленный участок, Т-образное оперение, смонтированное под вертикальным оперением и оснащенное на законцовке его трапециевидного киля амортизационной стойкой заднего колеса шасси, и главные разнесенные опоры с передними колесами в каплеобразных при виде сверху обтекателях, смонтированных на концевых шайбах обратной стреловидности, загибающихся вниз по дуге небольшого радиуса, образующих при виде спереди П-образную конфигурацию с низкорасположенным крылом обратной стреловидности, и выполнен с движительной системой и по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных в двух разноуровневых двухвинтовых модулях, задний из которых размещен выше переднего в схеме РТПВ-Х2+2, имеющей две пары разновеликих несущих винтов как большой и меньший из них на переднем пилоне, так и меньший и большой на вертикальном оперении, установленные при виде сбоку на удлиненных V-образных выходных валах промежуточных редукторов, наклоненных соответственно на углы 12,5° от вертикали вперед и назад вдоль плоскости симметрии, при этом, учитывая то, что оси вращения переднего и заднего больших несущих винтов, отклоненные от вертикальной оси промежуточных редукторов из соответствующей группы винтов наружу от центра масс, но и то, что в несущей системе передний и задний из меньших винтов, выполненных с диаметром, определяемым из соотношения: d=0,7065×D, м (где: D и d - диаметры большего и меньшего винтов в передней и задней их группе соответственно), имеют оси их вращения, отклоненные вовнутрь к центру масс от вертикальной оси соответствующих промежуточных редукторов, разнесенных вдоль оси симметрии на расстоянии, обеспечивающем при этом вращение передних и задних несущих винтов без взаимного их влияния и перекрытия как между большим передним и меньшим задним винтами, отклоненными вперед по полету, так и меньшим передним и большим задним винтами, отклоненными назад по полету, выполненными с полужестким креплением лопастей соответственно как без, так и с изменением циклического их шага, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в передней, так и задней группе винтов, но и одинакового их вращения между разновеликими винтами передней и задней группы винтов, например, при виде сверху по часовой стрелке и против соответственно между винтами передним большим с меньшим задним и между передним меньшим с большим задним винтами, размещенными в плане с соответствующими их лопастями перпендикулярно и вдоль оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно крыла обратной стреловидности и стреловидного стабилизатора, которые имеют по всему размаху их консолей соответственно закрылки с флапперонами и рули высоты, уменьшающие при их максимальном отклонении общие потери на 11% в вертикальной тяге соответствующей группы винтов, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой продольной несущей схемы в полетную конфигурацию пятивинтового винтокрыла, имеющего отклоненные вперед и назад по полету несущие винты соответственно двухвинтовой продольной несущей схемы и двухвинтовой движительно-несущей продольной системы, но и толкающий винт движительной системы с независимым его вращением и задним расположением на конце хвостовой балки за трапециевидными килем и вертикальным оперением, но и стреловидным стабилизатором, размах спрямленного участка задней кромки и концевые части которого соответственно больше диаметра заднего толкающего винта и ограничивают подход к нему с обеих сторон, создающие соответствующими винтами большим передним с меньшим задним и меньшим передним с задним большим косой их обдувкой соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7% или 15% больше от нормального взлетного веса при вращающихся с отклоненными назад и вперед по полету несущими винтами соответственно на режимах, близких к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 50% или 70% от взлетной мощности силовой установки, 30% мощности из которых перераспределяется через кормовой выходной вал главного редуктора на задний толкающий винт, а остальные из 50% или 70% мощности перераспределяются через главный и соответствующий промежуточный редукторы на несущие винты передней и задней группы, но и обратно, при этом мощность двигателей, перераспределяемая промежуточными редукторами на меньшие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в передней и задней их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними), причем система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбодизельных двигателей (ТДД), расположенных в кормовой части фюзеляжа, к каждой паре передней и задней группе винтов посредством соответствующих Г-образных в плоскости симметрии промежуточных редукторов, входные валы которых связаны продольными валами с верхним уровнем выходных валов главного редуктора, имеющего и кормовой выходной вал толкающего винта, снабженный перед последним электромагнитной муфтой сцепления, и выполненного в плоскости симметрии Н-образной конфигурации, входные валы нижнего уровня которого расположены в плоскости симметрии и связаны с ТДД, размещенными спереди и сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности соответственно с задним и передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для горизонтального полета или аварийной посадки соответственно с работающим толкающим винтом и при близком режиме к самовращению несущих винтов передней и задней группы или с четырьмя авторотирующими несущими винтами, при этом отклонение закрылок и флапперонов на крыле выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами.
Благодаря наличию этих признаков, позволяющих выполнить многовинтовой беспилотный скоростной вертолет (МБСВ), содержащий подфюзеляжный киль, образующий со стреловидным стабилизатором, имеющим по задней кромке спрямленный участок, Т-образное оперение, смонтированное под вертикальным оперением и оснащенное на законцовке его трапециевидного киля амортизационной стойкой заднего колеса шасси, и главные разнесенные опоры с передними неубирающимися колесами в каплеобразных при виде сверху обтекателях, смонтированных на подкрыльных концевых шайбах обратной стреловидности, образующих по дуге при виде спереди П-образную конфигурацию с низкорасположенным крылом обратной стреловидности, и выполнен с движительной системой и по концепции распределенной тяги перекрещивающихся винтов, размещенных в двухвинтовых модулях продольной четырехвинтовой схемы РТПВ-Х2+2, имеющей две пары разновеликих несущих винтов как большой и меньший из них на переднем пилоне, так и меньший и большой на вертикальном оперении, установленные при виде сбоку на удлиненных V-образных выходных валах промежуточных редукторов, наклоненных соответственно на углы 12,5° от вертикали вперед и назад вдоль плоскости симметрии. МБСВ снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой продольной несущей схемы в полетную конфигурацию пятивинтового винтокрыла, имеющего отклоненные вперед и назад по полету несущие винты соответственно двухвинтовой продольной несущей схемы и двухвинтовой движительно-несущей продольной системы, но и толкающий винт движительной системы с независимым его вращением и задним расположением на конце хвостовой балки за вертикальным трапециевидным оперением, создающие соответствующими винтами большим передним с меньшим задним и меньшим передним с задним большим косой их обдувкой соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета. В несущей системе передний и задний из меньших винтов, выполненных с диаметром, определяемым из соотношения: d=0,7065×D, м (где: D и d - диаметры большего и меньшего винтов в передней и задней их группе соответственно), имеют оси их вращения, отклоненные вовнутрь к центру масс от вертикальной оси соответствующих промежуточных редукторов, разнесенных вдоль оси симметрии на расстоянии, обеспечивающем при этом вращение передних и задних несущих винтов без взаимного их влияния и перекрытия. Мощность двигателей, перераспределяемая промежуточными редукторами на меньшие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в передней и задней их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними). Система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности от двух ТДД, расположенных в кормовой части фюзеляжа, к каждой паре передней и задней группе винтов посредством соответствующих Г-образных в плоскости симметрии промежуточных редукторов, входные валы которых связаны продольными валами с верхним уровнем выходных валов главного редуктора, имеющего и кормовой выходной вал толкающего винта, снабженный перед последним электромагнитной муфтой сцепления и выполненного в плоскости симметрии Н-образной конфигурации, нижний уровень входных валов которого расположены в плоскости симметрии и связаны с ТДД, размещенными спереди и сзади от соответствующих входных их валов и выполненными для отбора их взлетной мощности соответственно с задним и передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен двумя муфтами свободного хода, выдающими, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет. При авторотации или на режимах, близких к самовращению несущих винтов, срыв потока на перекрещивающихся их лопастях отодвигается на более высокие скорости полета, что позволит из-за аэродинамической симметрии относительно центра масс исключить потерю подъемной силы из-за срыва потока с отступающих их лопастей на режиме горизонтального полета и, как следствие, достичь скорости полета 450 или 420 км/ч соответственно. Все это позволит повысить скороподъемность, высоту и дальность полета МБСВ со схемой перекрещивающихся несущих разновеликих винтов, являющейся наиболее эффективной многовинтовой схемой при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание, а также повысить безопасность. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно, дизельного МБСВ.
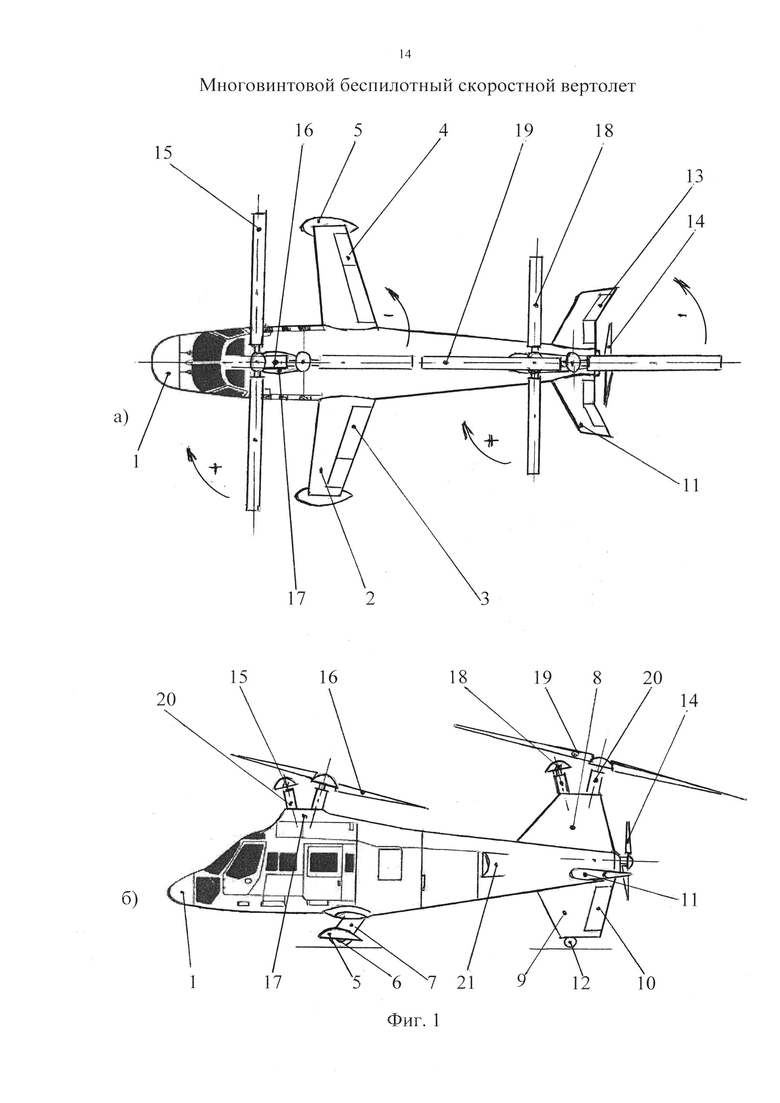
Предлагаемое изобретение МБСВ с четырьмя разновеликими перекрещивающимися несущими винтами, низкорасположенным крылом обратной стреловидности и толкающим винтом, позволяющим с крылом при крейсерском скоростном его полете снизить нагрузку на несущие винты, иллюстрируется общими видами на фиг. 1.
На фиг. 1 изображен МБСВ исполнения РТПВ-Х2+2 на общих видах сверху и сбоку соответственно а) и б) с расположением на конце тонкой хвостовой балки толкающего винта, но и на переднем пилоне и вертикальном оперении соответствующих групп несущих разновеликих двухлопастных винтов соответственно большого с меньшим и меньшего с большим для различных вариантов его использования:
а) в полетной конфигурации вертолета четырехвинтовой продольной схемы РТПВ-Х2+2, несущие винты которой при виде сверху имеют вращение по часовой стрелке и против соответственно между винтами передним большим с меньшим задним и между передним меньшим с большим задним винтами, размещенными в плане с соответствующими их лопастями перпендикулярно и вдоль оси симметрии;
б) в полетной конфигурации пятивинтового винтокрыла с двухвинтовой продольной несущей схемой и двухвинтовой движительно-несущей продольной системой для создания подъемной силы совместно с крылом и пропульсивной тяги совместно с маршевой горизонтальной тягой, обеспечиваемой задним толкающим винтом.
Многоцелевой МБСВ, представленный на фиг. 1 и снабженный движительной системой, выполнен по продольной схеме и концепции РТПВ-Х2+2, содержит фюзеляж 1 и умеренного удлинения низкорасположенное крыло 2 обратной стреловидности (см. фиг. 1a), имеющее по всему размаху закрылки 3 и флаппероны 4, но и концевые обтекатели 5 главного колесного шасси 6, выполненные каплевидной формы в плане и смонтированные на подкрыльных концевых шайбах 7 обратной стреловидности. При этом трапециевидное вертикальное оперение 8 содержит подфюзеляжный киль 9, имеющий руль направления 10 и образующий со стреловидным стабилизатором 11, имеющим спрямленный участок задней его кромки, подфюзеляжное Т-образное оперение, смонтированное под вертикальным оперением 8 и оснащенное на законцовке его трапециевидного киля амортизационной стойкой заднего колеса 12 трехопорного неубирающегося шасси (см. фиг. 1б). Стреловидный стабилизатор 11, имеющий по всему размаху рули высоты 13, обеспечивает спрямленным участком задней его кромки свободное вращение заднего толкающего винта 14 движительной системы и ограничивает концевыми его частями подход с обеих сторон к нему, что повышает безопасность обслуживающего персонала на земле. Несущая система размещена в двухвинтовых модулях продольной четырехвинтовой схемы РТПВ-Х2+2, имеющей в двух парах разновеликие несущие винты как большой 15 и меньший 16 из них на переднем пилоне 17, так и меньший 18 и большой 19 на вертикальном оперении 8, установленные при виде сбоку на удлиненных V-образных выходных валах в обтекателях 20 промежуточных редукторов, наклоненных соответственно на углы 12,5° от вертикали вперед и назад вдоль плоскости симметрии. Передний пилон 17, выполненный в виде каплевидной формы в плане, и вертикальное оперение 8, имеющие в верхней части каждого из них соответствующие обтекатели 20 несущих винтов. Во время аварийной посадки на режиме авторотации четырех перекрещивающихся несущих винтов передней группы 15-16 и задней группы 18-19 для разгрузки крыла 2 его закрылки 3 и флаппероны 4 автоматически отклоняются на углы 40° и 20° соответственно, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на углы 75° и 47°. Промежуточные редукторы разнесены вдоль оси симметрии на расстоянии, обеспечивающем при этом вращение передних и задних несущих винтов без взаимного их влияния и перекрытия (см. фиг. 1а) как между большим 15 передним и меньшим 18 задним винтами, отклоненными вперед по полету, так и меньшим 16 передним и большим 19 задним винтами, отклоненными назад по полету (см. фиг. 1б), выполненными с полужестким креплением лопастей соответственно как без, так и с изменением циклического их шага. При этом для управления креном и маневрирования на низких скоростях полета этого вполне достаточно - ведь несущие винты 16 и 19, вращающиеся на режиме, близком к самовращению, не участвуют в создании ощутимой (почти 5,6%) горизонтальной тяги в крейсерском полете. Кроме того, крыло 2 и толкающий винт 14 позволяют снизить нагрузку на несущие винты, уменьшить на всех них угол атаки каждой отступающей лопасти и, особенно, несущих винтов 15 и 18, но и избежать срыва потока на них наравне с винтами 16 и 19, компенсирующих автоматом перекоса эту разницу, циклически уменьшая угол атаки лопастей данных винтов на наступающей стороне и увеличивая на отступающей. На вертолетных режимах полета в несущей системе между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в передней 15-16, так и задней 18-19 группе винтов, но и одинакового их вращения между разновеликими винтами передней и задней группы винтов, например, при виде с верху по часовой стрелке и против соответственно между винтами передним 15 большим с меньшим 18 задним и между передним меньшим 16 с большим 19 задним винтами, размещенными в плане с соответствующими их лопастями перпендикулярно и вдоль оси симметрии (см. фиг. 1а). Имеется дублированная стабилизирующая система, обеспечивающая на режиме висения и на переходных режимах полета стабилизацию продольного и поперечного положения МБСВ и стабилизацию по угловой скорости тангажа и крена, но и демпфирования рыскания и изменения высоты полета.
Дизельная СУ, состоящая из двух мотогондол 21, в каждой из которых имеется, например, ТДД, выполненных для отбора их взлетной их мощности с задним и передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтами свободного хода и сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность двух ТДД, обеспечивающая продолжение полета при одном работающем двигателе, так как все несущие винты и задний толкающий винт имели независимые приводы. При этом система управления двигателей с трансмиссией обеспечивает плавное перераспределение их мощности при переходе в режим крейсерского полета с несущих винтов на задний толкающий винт (на несущие винты при переходных режимах полета подается 20% крутящего момента, допускаются режимы как близкий к их самовращению, так и их авторотация для аварийной посадки), но и уменьшение подводимой мощности от двигателей со 100% до 30% располагаемой взлетной мощности СУ, которой было достаточно для привода толкающего винта при скоростном полете. Последнее предопределяет и существенно меньший расход топлива и, следовательно, большой радиус действия МБСВ. Передача взлетной мощности от двух ТДД к передней 15-16 и задней 18-19 группе несущих винтов обеспечивается посредством соответствующих Г-образных в плоскости симметрии промежуточных редукторов, входные валы которых связаны продольными валами с верхним уровнем выходных валов многопоточного главного Н-образного в плоскости симметрии редуктора, имеющего как входные валы нижнего уровня, которые расположены в плоскости симметрии и связаны с ТДД, так и кормовой выходной вал для передачи крутящего момента на толкающий винт 14, снабженный перед последним электромагнитной муфтой сцепления (на фиг. 1 не показаны). Трехопорное неубирающееся колесное шасси, главные боковые опоры с колесами 6 смонтированы в подкрыльных обтекателях 5 крыла 2, вспомогательная задняя опора с колесом 12 - в обтекателе килевой поверхности 9.
Управление дизельным МБСВ обеспечивается общим и дифференциальным изменением шага передней 15-16 и задней 18-19 группы несущих винтов, а также и изменением циклического шага несущих винтов: переднего меньшего 16 и заднего большего 19, но и отклонением рулевых поверхностей: флапперонов 4, рулей направления 10 и рулей высоты 12, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 2 и несущими винтами передней 15-16 и задней 18-19 их группы, основная и вспомогательная маршевая тяга - соответственно задним толкающим винтом 14 и несущими винтами передней 15-16 и задней 18-19 их группы, на режиме висения только несущими винтами 15-16 и 18-19, на режиме перехода - крылом 2 с несущими винтами 15-16 и 18-19. При переходе к вертикальному взлету-посадке (висению) закрылки 3 и флаппероны 4 крыла 2 отклоняются на максимальные их углы синхронно с обеспечением передачи взлетной мощности на несущие винты 15-16 и 18-19 и отключением от трансмиссии заднего толкающего винта 14 (см. фиг. 1б). После создания необходимой подъемной тяги несущими винтами 15-16 и 18-19 обеспечиваются вертолетные режимы полета. При его полетной конфигурации вертолета четырехвинтовой несущей схемы реактивные моменты с учетом отклонения вдоль оси симметрии осей вращения несущих винтов 15-18 и 16-19 соответственно вперед и назад по полету компенсируются полностью за счет также взаимно противоположного их вращения между винтами как в соответствующих группах, так и одноименными винтами передней и задней групп, например между большим передним 15 и большим задним 19 и т.п.
При висении на вертолетных режимах полета продольное управление МБСВ осуществляется изменением шага винтов переднего большего 15 и заднего меньшего 18, оси вращения которых отклонены на удлиненных валах вперед по полету (см. фиг. 1б). Путевое управление при висении с декомпенсацией реактивного момента обеспечивается дифференциальным отклонением лопастей также переднего большего 15 и заднего меньшего 18 при повышении эффективности всех несущих винтов. Поперечное управление обеспечивается изменением циклического шага переднего меньшего 16 и заднего большего 19 несущих винтов, осуществляющих поперечную балансировку при одновременном изменении шага винтов этих групп. Отсутствие при висении перекрытия как переднего 18 и заднего 19, так и левого 14 и правого 15 несущих винтов также снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на крейсерский режим полета убираются закрылки 3 и флаппероны 4 крыла 2 и система управления двигателей с трансмиссией обеспечивает плавное перераспределение взлетной мощности СУ при переходе в режим горизонтального полета с несущих винтов 15-16 и 18-19 на задний толкающий винт 14 (см. фиг. 1б). После чего производится горизонтальный крейсерский скоростной полет МБСВ в полетной конфигурации пятивинтового винтокрыла, при котором путевое управление обеспечивается рулем направления 10 подфюзеляжного киля 9. Продольное и поперечное управление МБСВ при горизонтальном его полете осуществляется синфазным и дифференциальным отклонением рулей высоты 12 и флапперонов 4 крыла 2 соответственно. При этом исключение от продольного и поперечного управления МБСВ и, особенно, поперечного его управления несущих винтов 16 и 18 с изменением циклического их шага не изменит аэродинамической симметрии несущей системы, что позволит отодвинуть срыв потока на лопастях несущих винтов на более высокие скорости полета и достичь скорости горизонтального полета 400-420 км/ч На крейсерских режимах скоростного полета МБСВ при создании маршевой тяги задним толкающим винтом 14 и пропульсивной тяги его несущими винтами 15-16 и 18-19 соответственно передний и задний их групп имеют взаимно противоположное их вращения в каждой группе винтов и, тем самым, соответственно увеличивают КПД этих винтов, обеспечивают более плавное обтекание крыла 2 и стабилизатора 11 и весьма повышают эффективность движительной системы и несущей группы винтов.
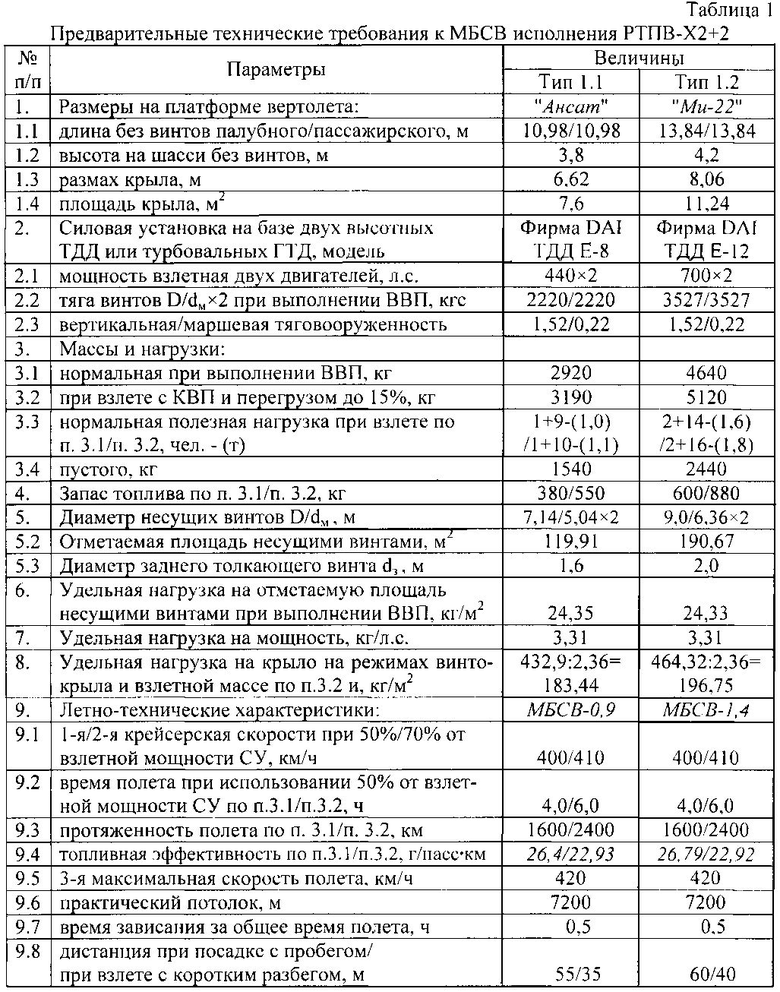
Таким образом, дизельный МБСВ, снабженный задним толкающим винтом, выполнен по концепции распределенной тяги перекрещивающихся винтов, размещенных в двухвинтовых модулях продольной четырехвинтовой схемы РТПВ-Х2+2, имеющей две пары разновеликих несущих винтов как большой и меньший из них на переднем пилоне, так и меньший и большой на вертикальном оперении, установленные на удлиненных валах промежуточных редукторов, наклоненных соответственно на углы 12,5° от вертикали вперед и назад вдоль плоскости симметрии. МБСВ снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой продольной несущей схемы в полетную конфигурацию пятивинтового винтокрыла, имеющего отклоненные вперед и назад по полету несущие винты соответственно двухвинтовой продольной несущей схемы и двухвинтовой движительно-несущей продольной системы, но и толкающий винт с независимым его вращением и задним расположением на конце хвостовой балки за вертикальным трапециевидным оперением, создающие соответствующими винтами большим передним с меньшим задним и меньшим передним с задним большим косой их обдувкой соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета. Выбор такой аэродинамической схемы не случаен, т.к. подобная компоновка исключает потерю подъемной силы из-за срыва потока с отступающих лопастей несущих двухлопастных винтов на режиме горизонтального полета, компенсируя оную их противовращением, и обладает аэродинамической симметрией. Задний толкающий флюгерно-реверсивный винт, создающий маршевую горизонтальную тягу, обеспечивают необходимое как повышение скорости горизонтального полета, так и уменьшение дистанции при посадке с пробегом. Низкорасположенное крыло обратной стреловидности находится вблизи центра масс, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать выполнение технологии ВВП, КВП и КВВП. Однако нет никаких сомнений в том, что на пути освоения таких многоцелевых МБСВ для специальной и деловой авиации, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Поэтому только на базе имеющихся конструкций вертолетов можно, сокращая сроки освоения дизельных МБСВ, проводить дальнейшие исследования по созданию широкого их семейства, включая и МБСВ-1,4 с двумя ТДД типа Е-12 австрийской фирмы DAI (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых беспилотных скоростных вертолетов. Многовинтовой беспилотный скоростной вертолет (МБСВ) выполнен с перекрещивающимися двухлопастными винтами, имеет на верхней части фюзеляжа турбовальный двигатель, передающий крутящий момент через главный редуктор на несущие винты, смонтированные на длинных валах, наклоненных на углы 12,5° от вертикали вперед и назад и закрытых обтекателями. МБСВ содержит вертикальное оперение, имеющее на конце стабилизатора киль-шайбы, и трехопорное неубирающееся колесное шасси, дополнительный киль, образующий со стреловидным стабилизатором подфюзеляжное Т-образное оперение. МБСВ снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой продольной несущей схемы в полетную конфигурацию пятивинтового винтокрыла. Система трансмиссии обеспечивает передачу взлетной мощности от двух турбодизельных двигателей, размещенных в кормовой части фюзеляжа, к передней и задней группе несущих винтов. Достигается увеличение полезной нагрузки, уменьшение мощности на путевую балансировку при висении и улучшение поперечной и продольной управляемости. 1 ил., 1 табл.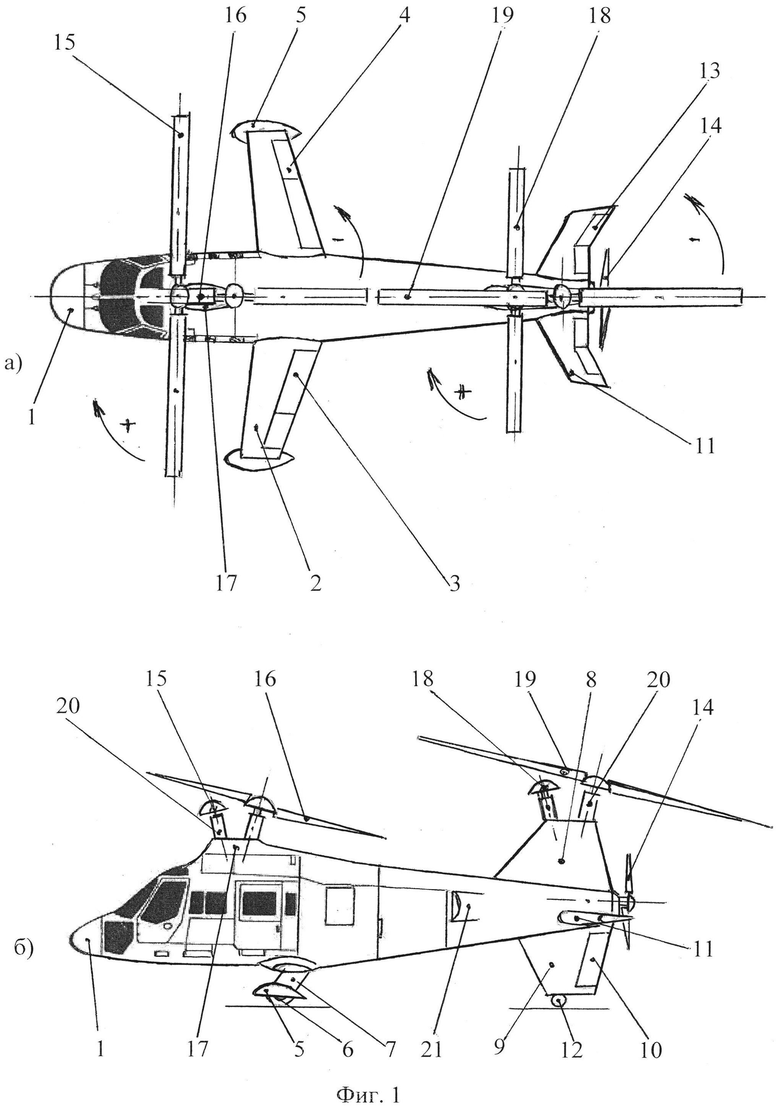
Многовинтовой беспилотный скоростной вертолет, выполненный с перекрещивающимися двухлопастными несущими винтами, имеет на верхней и в задней части фюзеляжа силовую установку, включающую турбовальный двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах и закрытых обтекателями, содержит вертикальное оперение, имеющее на конце стабилизатора киль-шайбы, и трехопорное неубирающееся колесное шасси, отличающийся тем, что он содержит подфюзеляжный киль, образующий со стреловидным стабилизатором, имеющим по задней кромке спрямленный участок, Т-образное оперение, смонтированное под вертикальным оперением и оснащенное на законцовке его трапециевидного киля амортизационной стойкой заднего колеса шасси, и главные разнесенные опоры с передними колесами в каплеобразных при виде сверху обтекателях, смонтированных на концевых шайбах обратной стреловидности, загибающихся вниз по дуге небольшого радиуса, образующих при виде спереди П-образную конфигурацию с низкорасположенным крылом обратной стреловидности, и выполнен с движительной системой и по концепции распределенной тяги перекрещивающихся винтов (РТПВ), расположенных в двух разноуровневых двухвинтовых модулях, задний из которых размещен выше переднего в схеме РТПВ-Х2+2, имеющей две пары разновеликих несущих винтов как большой и меньший из них на переднем пилоне, так и меньший и большой на вертикальном оперении, установленные при виде сбоку на удлиненных V-образных выходных валах промежуточных редукторов, наклоненных соответственно на углы 12,5° от вертикали вперед и назад вдоль плоскости симметрии, при этом, учитывая то, что оси вращения переднего и заднего больших несущих винтов, отклоненные от вертикальной оси промежуточных редукторов из соответствующей группы винтов наружу от центра масс, но и то, что в несущей системе передний и задний из меньших винтов, выполненных с диаметром, определяемым из соотношения: d=0,7065×D, м (где: D и d - диаметры большего и меньшего винтов в передней и задней их группе соответственно), имеют оси их вращения, отклоненные вовнутрь к центру масс от вертикальной оси соответствующих промежуточных редукторов, разнесенных вдоль оси симметрии на расстоянии, обеспечивающем при этом вращение передних и задних несущих винтов без взаимного их влияния и перекрытия как между большим передним и меньшим задним винтами, отклоненными вперед по полету, так и меньшим передним и большим задним винтами, отклоненными назад по полету, выполненными с полужестким креплением лопастей соответственно как без, так и с изменением циклического их шага, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в передней, так и задней группе винтов, но и одинакового их вращения между разновеликими винтами передней и задней группы винтов, например, при виде сверху по часовой стрелке и против соответственно между винтами передним большим с меньшим задним и между передним меньшим с большим задним винтами, размещенными в плане с соответствующими их лопастями перпендикулярно и вдоль оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно крыла обратной стреловидности и стреловидного стабилизатора, которые имеют по всему размаху их консолей соответственно закрылки с флапперонами и рули высоты, уменьшающие при их максимальном отклонении общие потери на 11% в вертикальной тяге соответствующей группы винтов, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой продольной несущей схемы в полетную конфигурацию пятивинтового винтокрыла, имеющего отклоненные вперед и назад по полету несущие винты соответственно двухвинтовой продольной несущей схемы и двухвинтовой движительно-несущей продольной системы, но и толкающий винт движительной системы с независимым его вращением и задним расположением на конце хвостовой балки за трапециевидными килем и вертикальным оперением, но и стреловидным стабилизатором, размах спрямленного участка задней кромки и концевые части которого соответственно больше диаметра заднего толкающего винта и ограничивают подход к нему с обеих сторон, создающие соответствующими винтами большим передним с меньшим задним и меньшим передним с задним большим косой их обдувкой соответственно наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7 или 15% больше от нормального взлетного веса при вращающихся с отклоненными назад и вперед по полету несущими винтами соответственно на режимах, близких к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 50 или 70% от взлетной мощности силовой установки, 30% мощности из которых перераспределяется через кормовой выходной вал главного редуктора на задний толкающий винт, а остальные из 50 или 70% мощности перераспределяются через главный и соответствующий промежуточный редукторы на несущие винты передней и задней группы, но и обратно, при этом мощность двигателей, перераспределяемая промежуточными редукторами на меньшие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и меньший винты в передней и задней их группе, каждая из которых получает через главный редуктор мощность, распределяемую поровну между ними), причем система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбодизельных двигателей (ТДД), расположенных в кормовой части фюзеляжа, к каждой паре передней и задней группе винтов посредством соответствующих Г-образных в плоскости симметрии промежуточных редукторов, входные валы которых связаны продольными валами с верхним уровнем выходных валов главного редуктора, имеющего и кормовой выходной вал толкающего винта, снабженный перед последним электромагнитной муфтой сцепления, и выполненного в плоскости симметрии Н-образной конфигурации, входные валы нижнего уровня которого расположены в плоскости симметрии и связаны с ТДД, размещенными спереди и сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности соответственно с задним и передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для горизонтального полета или аварийной посадки соответственно с работающим толкающим винтом и при близком режиме к самовращению несущих винтов передней и задней группы или с четырьмя авторотирующими несущими винтами, при этом отклонение закрылок и флапперонов на крыле выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами.
| ВЫСОКОСКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С БОЛЬШОЙ ДАЛЬНОСТЬЮ ПОЛЕТА | 2012 |
|
RU2520843C2 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПРИЛЕГАЮЩЕЙ | 0 |
|
SU293173A1 |
| КОМПОЗИЦИЯ ДЛЯ ГЕЛЕВОЙ САЛФЕТКИ, СОДЕРЖАЩЕЙ СУПЕРАБСОРБИРУЮЩЕЕ ГЕЛЕВОЕ ВОЛОКНО | 2016 |
|
RU2719591C2 |

