Изобретение относится к области авиационной техники и касается создания беспилотных вертикально взлетающих платформ с меньшими винтами в поворотных кольцевых каналах и распределенной тягой разновеликих винтов в несущей схеме Х2+2, снабженной парой перекрещивающихся из них несущих винтов на поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме вертикального пилона на центроплане крыла и имеющим при виде сбоку редуктор с V-образными валами для среднего и большего винтов, отклоняемых по оси симметрии от вертикали как вперед и обратно, так и только вперед соответственно для выполнения как вертикального взлета/посадки (ВВП), так короткого взлета/посадки (КВП).
Известен беспилотный вертолет модели "К-МАХ" фирмы «Kaman Aerospace» (США), выполненный с перекрещивающимися двухлопастными винтами, имеет на верхней части фюзеляжа двигатель, передающий крутящий момент через главный редуктор на поперечные несущие винты, смонтированные на длинных валах, наклоненных от плоскости симметрии влево и право и закрытых обтекателями, содержит вертикальный киль со стабилизатором и трехопорное неубирающееся колесное шасси.
Признаки совпадающие - вертолет, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных со значительным перекрытием с небольшим наклоном осей вращения. Наклон осей вращения двухлопастных винтов в поперечной плоскости наружу и синхронизация их вращения обеспечивает безопасное прохождение лопастей одного несущего винта над втулкой другого. Втулки несущих винтов имеют упрощенную конструкцию с общим горизонтальным шарниром. Турбовальный двигатель Lycoming T53-L-17A мощностью 1350 л.с. установлен сверху фюзеляжа, между несущими винтами за главным редуктором. Трансмиссия включает главный редуктор, от которого обеспечивается привод обоих перекрещивающихся несущих винтов. Беспилотный вертолет модели "К-МАХ", имеющий диаметр несущих винтов: 14,73 м, длину фюзеляжа: 12,73 м, высоту: 4,14 м, взлетный вес: 5443 кг при весе пустого: 2334 кг, максимальную/крейсерскую скорость полета: 193/185 км/ч, практический потолок: 7010 м и дальность полета: 494 км, может использоваться в специальной авиации как «летающий кран» для транспортировки грузов (массой до 2404 кг при массе топлива 705 кг) на внешней подвеске.
Причины, препятствующие поставленной задаче: первая - это то, что управление по тангажу и крену вертолета с перекрещивающимися несущими винтами изменяемого шага и с управлением циклического их шага значительно осложняет конструкцию, имеют большой объем регламентных работ и являются дорогими в эксплуатации, а постоянные вибрации, возникающие при работе автоматов их перекоса, создают неблагоприятные условия для работы других механизмов и оборудования и, особенно, когда лопасти несущих винтов наклоняются в точках перекрещивания вперед или назад, влево или вправо одновременно. Путевое управление осуществляется путем изменения дифференциального общего их шага. Вторая - это то, что в вертолете с перекрещивающимися несущими винтами имеет место большая масса хвостовой балки и хвостового оперения с вертикальным килем и стабилизатором с концевыми дополнительными киль-шабами, что увеличивает массу планера и, как следствие, предопределяет малую весовую отдачу. Третья - это то, что хвостовое оперение не имеет поверхностей управления по крену, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущих винтов с автоматами их перекосов, что ограничивает стабильность поперечно-продольной управляемости и возможность повышения скорости горизонтального поступательного полета и, особенно, с несущими винтами большего диаметра до 14,73 м. Четвертая - это то, что в вертолете двухвинтовой поперечной схемы из-за перекрещивания плоскостей вращения несущих винтов, а значит сложения подъемных сил в месте их перекрещивания возникает момент кабрирования, то есть подъема носовой части, а его однодвигательная силовая установка уменьшает и безопасность. Кроме того, перекрещивающиеся несущие винты смонтированы на длинных валах, наклоненных на углы 15° от плоскости симметрии в каждую сторону и на 5° вперед по полету, что не полностью компенсирует реактивные моменты несущих винтов в этой схеме на главном редукторе вертолета. Поэтому незначительные моменты по тангажу и курсу компенсируется системой управления. Кроме того, несущие винты не могут наклоняться вперед и назад так, чтобы исключать эффекты вследствие изменений в пространственном положении фюзеляжа, которые весьма ухудшают летно-технические характеристики вертолета благодаря увеличению аэродинамического сопротивления.
Известен многоцелевой беспилотный вертолет модели Boeing А160 «Humming-bird» (США), выполненный по одновинтовой несущей схеме и с рулевым винтом, имеющий силовую установку, включающую турбовальный двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и рулевой винты, вертикальное оперение, смонтированное под хвостовой балкой, оснащенное в носке килевой его поверхности амортизационной стойкой заднего колеса полозкового шасси, снабженного амортизаторами и передними колесами.
Признаки совпадающие - наличие вертикального оперения и турбовального двигателя, главного редуктора и валов трансмиссии, передающих мощность несущему и рулевому винтам, обеспечивающим перемещение вверх-вниз, вперед-назад, влево-вправо и в любой комбинации при его поступательном полете. Вращение несущего и рулевого винтов - синхронизирующее, взлетная тяговооруженность силовой установки (СУ), обеспечивающая максимальные скорости его полета до 260 км/ч и продолжительное время при висении, а также высоту полета до 6096 м. Беспилотный вертолет модели Boeing А160 при взлетном весе 2950 кг, имея целевую нагрузку 860 кг, может применяться в многоцелевых вертолетных комплексах для выполнения транспортных операций с использованием специальных грузовых аэродинамических контейнеров, прикрепляемых между полозковым шасси под днищем фюзеляжа.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с рулевым винтом имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении двух винтов, но и малую весовую отдачу и радиус действия. Вторая - это то, что СУ включает один турбовальный двигатель и тем самым снижает надежность крейсерского полета при его отказе. Третья - это то, что в вертолете одновинтовой схемы имеют место непроизводительные средние затраты 12-16% мощности СУ на привод рулевого винта, необходимость длинной хвостовой балки, агрегатов хвостовой трансмиссии и опасность, создаваемая рулевым винтом, смонтированным на конце горизонтального оперения, для наземного персонала. Четвертая - это то, что вес рулевого винта вместе с хвостовой балкой и агрегатами трансмиссии составляет до 18% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Пятая - это то, что хвостовое оперение не имеют поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения нагруженного несущего винта и работы автомата перекоса. Шестая - это то, что несущий винт изменяемого шага и с управлением циклического его шага значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создают неблагоприятные условия для работы других механизмов и оборудования. Все это и ограничивает возможность дальнейшего повышения грузоподъемности и скорости полета, а также показателей транспортной и топливной эффективности.
Наиболее близким к предлагаемому изобретению является беспилотная система вертикального взлета "Transformer ТХ" корпорации Lockheed Martin (США), имеющая два винта в поворотных кольцевых каналах, смонтированных по бокам несущего центроплана-отсека, в котором размещаются двигатели и главный редуктор с валами, проложенными внутри крыла и распределяющими мощность между винтами, при повороте которых он преобразовывается в двухвинтовую поперечную несущую схему для подъема и перевозки грузовых аэродинамических контейнеров, прикрепляемых между полозковым шасси под несущим центропланом-отсеком.
Признаки совпадающие - наличие поворотных канальных винтов, создающих горизонтальную и соответствующую их отклонениям вертикальную тягу, систему трансмиссии с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности СУ между поворотными винтами. Беспилотная система вертикального взлета "Transformer ТХ" с полозковым шасси и поворотными канальными винтами предназначена для ее приспособления к нескольким типам миссий со сменной полезной нагрузкой (ПН) и ее транспортировки на дальности до 400 км. Нагрузка может включать грузовые контейнеры, медицинские эвакуационные модули и тактические наземные автотранспортные средства. Поэтому ширина автодороги ограничивает как размах и корневую хорду крыла до 9,1 и 2,6 м соответственно, так и диаметр поворотных каналов D=2,6 м, обеспечивающих более безопасное применение, объединяя высокую скорость с посадочной зоной 32,58 м2.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на концах несущего центроплана-отсека поворотных каналов с редукторами винтов, имеющими по бокам каналов концевые части крыла, оснащенные системой их складывания, а спереди - входные воздухозаборники и воздуховоды к турбовальным двигателям, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что диаметры двух винтов ограничены габаритными размерами крыла в плане, и как, следствие, при висении поток от винтов диаметром 2,4 м, обдувая поверхность земли, создает значительную удельную нагрузку (ρs=345 кг/м2) на отметаемую площадь, а большие скорости потока, отбрасываемого от нее, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота кольцевых каналов взлетать и садиться «по-самолетному», как обычный самолет, эта беспилотная система вертикального взлета "Transformer ТХ" не может, так как полозковое шасси не имеет вспомогательных колес, которые могут использоваться при выполнении технологии КВП. Все это ограничивает увеличение полезной нагрузки и весовой отдачи, но при отсутствии возможности выполнения КВП - улучшение показателей дальности полета при доставке грузов.
Предлагаемым изобретением решается задача в указанной выше известной беспилотной вертикально взлетающей системе "Transformer ТХ" повышения взлетного веса и увеличения весовой отдачи, упрощения продольной балансировки при висении и улучшения поперечно-продольной управляемости, повышения показателей транспортной и топливной эффективности, а также дальности полета посредством оснащения несущими винтами и их наклона для увеличения пропульсивной тяги.
Отличительными признаками предлагаемого изобретения от указанной выше известной беспилотной системы вертикального взлета "Transformer ТХ", наиболее близкой к ней, является то, что она выполнена по двухбалочной схеме с движительно-несущей системой и концепции распределенной тяги разновеликих винтов (РТРВ), расположенных по схеме РТРВ-Х2+2, включающей наряду с двумя меньшим винтами в поворотных кольцевых каналах на консолях крыла, смонтированных по внешним бортам разнесенных балок, оснащена разновеликими винтами, установленными на поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного в плане центрального пилона с округленной его вершиной, установленного на центроплане крыла над центром масс, и снабженном редуктором перекрещивающихся винтов с верхним расположением V-образных выходных валов, имеющих как бы в V-образном редукторе при виде сбоку соответствующий угол между их осей вращения, равный 30°, и обеспечивающих размещение среднего и большего винтов над крылом в верхней полусфере соответственно от вертикали в первом и втором квадрантах и возможность их отклонения вдоль плоскости симметрии вперед и обратно таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая средний и больший винты в первом квадранте, соответственно для выполнения как вертикального взлета/посадки (ВВП), так и короткого взлета/посадки (КВП) с обеспечением необходимого вклада в подъемные и тяговые усилия дисками среднего и большего винтов, наклоняемых совместно только к передним частям разнесенных балок, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию двухвинтового винтокрыла или крылатого автожира, имеющего и отклоненные от вертикали вперед по полету оси вращения среднего и большего винтов V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13°, и меньшие винты двухвинтовой движительной системы в упомянутых поворотных кольцевых каналах, имеющих как на их выходах рулевые поверхности, установленные снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала, выполненные с отогнутыми их концами к центру последнего и обеспечивающие их синфазное и дифференциальное отклонение, так и с внешних бортов кольцевых каналов концевые части крыла, складывающиеся вперед по полету к бокам последних при транспортировании и создании меньшими винтами вертикальной тяги при выполнении ВВП совместно с подъемными силами среднего и большего несущих винтов, имеющих уравновешенные пропульсивные их тяги, но и обратно, причем при создании меньшими винтами маршевой тяги после как переходного маневра, так и выполнения КВП совместно с наклонной и пропульсивной тягой соответственно среднего и большего несущих винтов для скоростного крейсерского полета с достижением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 3,5% или 7% больше от нормального взлетного веса при вращающихся с отклоненными вперед по полету несущими винтами соответственно на режимах авторотации или близком к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 47,5% или 75% от взлетной мощности силовой установки, 31,66% мощности из которых перераспределяется через выходные валы объединительных редукторов на соответствующие поворотные меньшие винты, а остальные из 47,5% или 75% мощности перераспределяются через главный и поворотный V-образный редуктор на несущие винты центральной группы, при этом в центральной группе винтов, включающей средний и больший несущие винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения: d=0,7065×D, м (где: d и D - диаметры соответственно среднего и большего несущих винтов), имеют при выполнении ВВП оси вращения как среднего, так и большего двухлопастных несущих винтов, отклоненных вперед и назад по полету от вертикальной оси V-образного редуктора и выполненных с возможностью свободного их вращения и прохождения наступающих лопастей соответственно как над передней, так и задней кромками центроплана и тем самым создающих при выполнении ВВП и зависании гармоничное сочетание продольного и путевого управления, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в меньшей, так и в центральной группе винтов, но и одинакового их вращения между разновеликими винтами диагонально расположенной группы винтов, например, при виде сверху по часовой стрелке и против соответственно между винтами правым меньшим со средним несущим и между левым меньшим с большим несущим винтами, размещенными в плане с соответствующими их двумя лопастями вдоль и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих несущих винтов бортов разнесенных балок и консолей крыла с задней кромкой обратной стреловидности, причем консоли крыла с поворотными кольцевыми каналами, снабженными флапперонами на их выходе, представляют собой с межбалочным центропланом, имеющим стреловидную переднюю и округлую с соответствующим закрылком заднюю кромки, как бы аэродинамическую схему «бесхвостка» с поворотными консолями крыла, создающими как при поступательном скоростном полете в зоне максимальных индуктивных скоростей воздушного потока от соответствующих лопастей несущих винтов возможность повышения коэффициента подъемной силы крыла и несущей его способности и препятствования обратному перетеканию воздушного потока, особенно при поочередной обдувке консолей крыла средним и большим винтами, так и при выполнении ВВП и зависании после поворота консолей крыла возможность уменьшения на 38% потерь подъемной силы от их обдувки несущими винтами, при этом для упрощения ее транспортирования средний несущий винт выполнен трансформируемым, снабжен тормозной системой и складывания соответствующих двух его лопастей таким образом, что после его остановки и фиксирования его лопастей вдоль оси симметрии осуществляется одновременный поворот передней и задней его лопастей по часовой стрелке при виде сверху и их размещения параллельно соответствующим лопастям большего винта, а его четырехопорное велосипедной схемы колесное шасси, каждая передняя и задняя пара опор которого, установленная по соответствующим частям разнесенных балок и имеющая телескопические стойки, передняя и задняя пара из которых после их втягивания выполнены убирающимися соответственно в ниши разнесенных балок и вовнутрь цельноповоротных вертикальных килей, смонтированных под разнесенными балками, мощность двигателей, перераспределяемая V-образным редуктором на несущие винты, определяется из соотношения: N=0,7065×n, кВт (где: N и n - мощность, передаваемая соответственно на больший и средний несущие винты), система трансмиссии, включающая наряду с газотурбинными двигателями (ГТД), каждый из которых имеет передний вывод вала для отбора взлетной мощности, смонтирован в задней части соответствующей разнесенной балки и связан посредством муфты сцепления с объединительным Т-образным в плане редуктором, смонтированным в средней части разнесенной балки и образующим с левым и правым валами как бы две Т-образные в плане синхронизирующие трансмиссии, передающие крутящий момент к двум меньшим винтам и к двум среднему и большему несущим винтам соответственно к редукторам винтов в упомянутых кольцевых каналах и центральному главному редуктору, имеющему поворотный V-образный редуктор с верхним расположением выходных валов для центральной группы несущих винтов и выполненному с возможностью совместно с Т-образными редукторами как плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с большего несущего винта, вращающегося на режиме, близком к его самовращению, на средний несущий винт, выполняющий роль пропульсивного движителя, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть подводить на средний несущий винт, а 2/3 ее части - поровну на маршевые меньшие винты в кольцевых каналах, так и отключения от трансмиссии в горизонтальном скоростном полете любого избыточного ГТД и одного любого в случае его отказа или двух ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с двумя авторотирующими или нагруженными несущими винтами, отклонение закрылок и флапперонов выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующими несущими винтами при флюгерном положении меньших винтов с одновременным автоматическим ускоренным отклонением вниз как соответствующих закрылок, так и синфазным отклонением вниз рулевых поверхностей кольцевых каналов.
Кроме того, с целью упрощения конструкции трансмиссии, увеличения скорости полета и уменьшения массы комбинированной силовой установки, меньшие винты которой выполнены в виде спаренных с противоположным вращением выносных винтовентиляторов и газодинамическим их приводом от упомянутых ГТД, имеющих каждый степень сжатия воздуха (πк) не менее 15,0 в статических условиях в их компрессорах высокого давления, но и систему отбора газа и доставки его потока на привод винтовентиляторов, каждый из которых включает турбину с валом привода винтовентилятора, дополнительную камеру сгорания с регулятором расхода топлива и запалом, центральное тело, канал подвода газа к турбине вентилятора, канал отвода газов и топливопровод, который при вертикальном взлете/посадке и зависании используется для подачи топлива в дополнительные камеры сгорания каждого винтовентилятора, затем после перехода на поступательный горизонтальный скоростной полет системы подвода топлива перекрываются при одновременном увеличении подвода газа к турбине каждого винтовентилятора от одного из работающих ГТД, отключенного от системы трансмиссии привода несущих винтов и, значит, при таком способе дросселирования доля газа, отбираемого от работающего ГТД на привод винтовентиляторов, по мере снижения отбора мощности от взлетной его мощности увеличивается и при больших величинах заданного отбора газа для поддержания заданного значения маршевой тяги винтовентиляторов по мере дросселирования режим работы этого ГТД также увеличивается.
Благодаря наличию этих признаков, позволяющих освоить беспилотную вертикальн овзлетающую платформу (БВВП), выполненную по двухбалочной схеме с движительно-несущей системой и концепции распределенной тяги разновеликих винтов (РТРВ), расположенных по схеме РТРВ-Х2+2, включающей наряду с двумя меньшим винами в поворотных кольцевых каналах на консолях крыла, смонтированных по внешним борта разнесенных балок, оснащена разновеликими винтами, установленными на поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного в плане центрального пилона с округленной его вершиной, установленного на центроплане крыла над центром масс, и снабженном редуктором перекрещивающихся винтов с верхним расположением V-образных выходных валов, имеющих как бы в V-образном редукторе при виде сбоку соответствующий угол между их осей вращения, равный 30°, и обеспечивающих размещение среднего и большего винтов над крылом в верхней полусфере соответственно от вертикали в первом и втором квадрантах и возможность их отклонения вдоль плоскости симметрии вперед и обратно таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая средний и больший винты в первом квадранте, соответственно для выполнения как ВВП, так и КВП с обеспечением необходимого вклада в подъемные и тяговые усилия дисками среднего и большего винтов, наклоняемых совместно только к передним частям разнесенных балок, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию двухвинтового винтокрыла или крылатого автожира, имеющего и отклоненные от вертикали вперед по полету оси вращения среднего и большего винтов V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13°, и меньшие винты двухвинтовой движительной системы в упомянутых поворотных кольцевых каналах, имеющих как на их выходах рулевые поверхности, установленные снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала, выполненные с отогнутыми их концами к центру последнего и обеспечивающие их синфазное и дифференциальное отклонение, так и с внешних бортов кольцевых каналов концевые части крыла, складывающиеся вперед по полету к бокам последних при транспортировании и создании меньшими винтами вертикальной тяги при выполнении ВВП совместно с подъемными силами среднего и большего несущих винтов, имеющих уравновешенные пропульсивные их тяги, но и обратно. При создании меньшими винтами маршевой тяги после как переходного маневра, так и выполнения КВП совместно с наклонной и пропульсивной тягой соответственно среднего и большего несущих винтов для скоростного крейсерского полета с достижением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 3,5% или 7% больше от нормального взлетного веса при вращающихся с отклоненными вперед по полету несущими винтами соответственно на режимах авторотации или близком к их самовращению и созданию пропульсивной и маршевой тяги, обеспечиваемой работающими двигателями, выдающими 47,5% или 75% от взлетной мощности силовой установки, 31,66% мощности из которых перераспределяется через выходные валы объединительных редукторов на соответствующие поворотные меньшие винты, а остальные из 47,5% или 75% мощности перераспределяются через главный и поворотный V-образный редуктор на несущие винты центральной группы. При этом в центральной группе винтов, включающей несущие средний и больший винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения: d=0,7065×D, м (где: d и D - диаметры среднего и большего несущих винтов в центральной группе винтов соответственно), имеют при выполнении ВВП оси вращения как среднего, так и большего двухлопастных несущих винтов, отклоненных вперед и назад по полету от вертикальной оси V-образного редуктора и выполненных с возможностью свободного их вращения и прохождения наступающих лопастей соответственно как над передней, так и задней кромками центроплана и тем самым создающих при выполнении ВВП и зависании гармоничное сочетание продольного и путевого управления.
Система трансмиссии, включающая наряду с двумя ГТД, каждый из которых имеет передний вывод вала для отбора взлетной мощности, смонтирован в задней части соответствующей разнесенной балки и связан посредством муфты сцепления с объединительным Т-образным в плане редуктором, смонтированным в средней части разнесенной балки и образующим с левым и правым валами как бы две Т-образные в плане синхронизирующие трансмиссии, передающие крутящий момент к двум меньшим винтам и к двум среднему и большему несущим винтам соответственно к редукторам винтов в упомянутых кольцевых каналах и центральному главному редуктору, имеющему поворотный V-образный редуктор с верхним расположением выходных валов для центральной группы несущих винтов и выполненным с возможностью совместно с Т-образными редукторами как плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с большего несущего винта, вращающегося на режиме, близком к его самовращению, на средний несущий винт, выполняющий роль пропульсивного движителя, но и уменьшения на 5% взлетной мощности от любого из работающих двигателей, позволяющего из располагаемой мощности которого 1/3 ее часть поровну подводить на средний несущий винт, а 2/3 ее части - поровну на маршевые меньшие винты в кольцевых каналах, и отключения от трансмиссии в горизонтальном скоростном полете любого избыточного ГТД и одного любого в случае его отказа или двух ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с двумя авторотирующими или нагруженными несущими винтами. При авторотации или на режимах, близких к самовращению несущих винтов, срыв потока на перекрещивающихся их лопастях отодвигается на более высокие скорости полета, что позволит из-за аэродинамической симметрии относительно центра масс исключить потерю подъемной силы из-за срыва потока с отступающих их лопастей на режиме горизонтального полета и, как следствие, достичь скорости полета 375 или 400 км/ч соответственно. Все это позволит повысить скороподъемность, высоту и дальность полета БВВП со схемой перекрещивающихся несущих разновеликих винтов, являющейся наиболее эффективной многовинтовой схемой при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание, а также повысить безопасность. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно, коммерческой турбовинтовентиляторной вертикально взлетающей платформы (ТВВП).
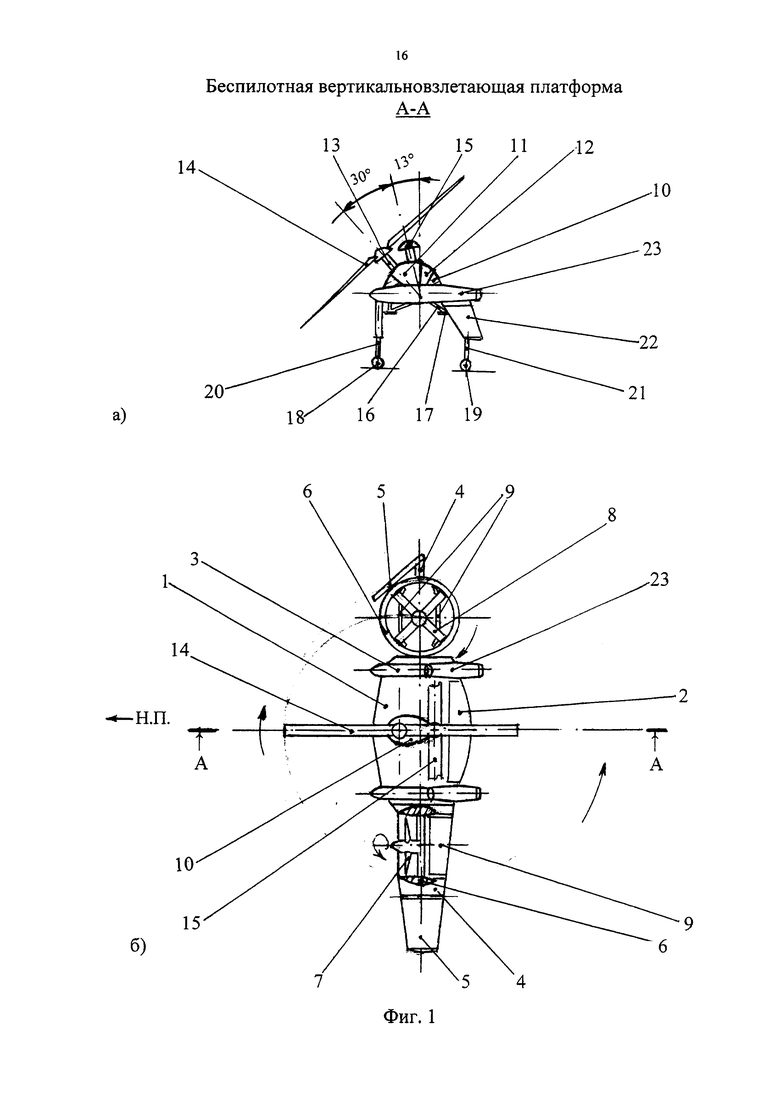
Предлагаемое изобретение в условиях различной полетной конфигурации БВВП исполнения РТРВ-Х2+2 иллюстрируется общими видами, представленными на фиг.1.
На фиг. 1 изображена турбовинтовая БВВП на общих видах сбоку и сверху соответственно а) и б) с наклонным расположением поворотного V-образного редуктора с двумя валами в обтекателях и разновеликими двухлопастными средним и большим несущими винтами и с изменяемым вектором тяги двух меньших винтов в поворотных кольцевых каналах для различных вариантов возможного его использования:
а) в полетной конфигурации крылатого автожира или винтокрыла с двухвинтовой несущей схемой для создания подъемной силы совместно с крылом и маршевой тягой, обеспечиваемой двумя меньшими винтами в поворотных кольцевых каналах при выполнении технологии КВП с использованием колесного шасси;
б) в полетной конфигурации вертолета четырехвинтовой несущей схемы РТРВ-Х2+2, снабженной разновеликими двумя средним и большим и двумя меньшими в кольцевых каналах винтами, размещенными соответственно на центроплане крыла и на его концах, с условным расположением левой и правой поворотных внешних секций крыла при выполнении горизонтального скоростного полета и технологии ВВП.
Многофункциональная БВВП, представленная на фиг. 1 и выполненная по двухбалочной схеме «бесхвостка» и по концепции РТРВ-Х2+2, содержит несущий центроплан-отсек 1 с закрылками 2, размещенный между разнесенными балками 3, имеющими по внешним бортам большого удлинения консоли 4 со складывающимися концами 5 и поворотными кольцевыми каналами 6, левый и правый из которых имеют на ребрах жесткости редуктор с меньшим флюгерно-реверсивным винтом 7 и 8 соответственно и на выходе каждого из них рулевые поверхности - флаппероны 9 с возможностью их синфазного и дифференциального отклонения. На верхней поверхности несущего центроплана-отсека 1 над центром масс имеется центральный пилон 10, имеющий каплевидную форму в плане и поворотный сектор-пилон 11, смонтированный в переднем продольном секторном проеме 12 на верху вертикального пилона 10 и имеющий V-образный редуктор с двумя валами в обтекателях 13 со средним передним 14 и большим задним 15 несущими винтами, отклоняемыми вдоль оси симметрии от вертикали и вперед к передней кромке центроплана-отсека 1, и обратно (см. фиг. 1а). Несущая система размещена в двухвинтовых модулях поперечно-продольной четырехвинтовой схемы РТРВ-Х2+2, имеющей как в консольной группе левый 7 и правый 8 меньшие винты, так и в центральной 14-15 группе несущих винтов, установленных на V-образном редукторе при виде сбоку на удлиненных V-образных выходных валах в обтекателях 13, имеющих соответствующий угол между их осями вращения, равный 30°. Во время аварийной посадки при выполнении ВВП и в случае отказа двигателей БВВП его несущие 14-15 винты центральной группы, а также меньшие левый 7 и правый 8 консольной группы несущих винтов работают на режиме авторотации и разгружают крыло 1 с консолями 4. А во время горизонтального полета и отказа его двух двигателей для аварийной посадки в полетной конфигурации крылатого автожира на режимах флюгирования меньших винтов 7-8 и авторотации двух перекрещивающихся несущих винтов 14-15 для разгрузки крыла 1 с консолями 4 его закрылки 2 и флаппероны 9 автоматически отклоняются на углы 20° или 47° в зависимости от скорости снижения, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на угол 75° и только закрылок 2 крыла 1. Все четырехлопастные меньшие поворотные 7-8 и несущие перекрещивающиеся 14-15 винты выполнены без автоматов перекоса и с жестким креплением их лопастей и имеют синхронизированное вращение. На вертолетных режимах полета в несущей продольно-поперечной схеме между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения как в консольной 7-8 группе меньших винтов, так и центральной 14-15 группе несущих винтов, но и одинакового их вращения между разновеликими диагонально расположенными несущими винтами, например, при виде сверху как по часовой стрелке, так и против соответственно между как передним средним с правым меньшим винтами, так и задним большим с левым меньшим 7 винтами, размещенными в плане при этом с соответствующими лопастями среднего и большего несущих винтов вдоль и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания центроплана-отсека 1 его внешних консолей 4 и разнесенных балок 3 воздушным потоком от соответствующих несущих 14-15 винтов для гармоничного сочетания их работы при продольном и путевом управлении (см. фиг. 1б). Имеется согласование совместной работы системы путевого управления при висении, продольного и поперечного на крейсерских режимах полета и выполнении технологии КВП с учетом соответствующего отклонения поворотных консолей крыла 4 с меньшими 7-8 винтами в кольцевых каналах 6, включая и ускоренного. Для подъема и перевозки грузовых аэродинамических контейнеров (на фиг. 1 не показаны), прикрепляемых между стойками четырехопорного колесного шасси к нижней поверхности несущего центроплана-отсека 1, имеется четыре трубчатых пирамидальных силовых элемента 16 с захватными устройствами 17, равноудаленными от центра масс. Четырехопорное велосипедной схемы шасси, каждая передняя и задняя пара опор с колесами 18 и 19 которого, установленная по соответствующим частям разнесенных балок 3 и имеющая телескопические стойки, передняя 20 и задняя 21 пара из которых после их втягивания выполнены убирающимися соответственно в передние назад по полету ниши разнесенных балок 3 и вверх вовнутрь цельноповоротных вертикальных килей 22, смонтированных под концами разнесенных балок 3.
Двухдвигательная СУ, например, турбовинтовая имеет мотогондолы 23, смонтированные в задней части разнесенных балок 3 и снабженные, например, ГТД, выполненными для отбора их взлетной мощности с передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и объединительным редуктором синхронизирующую систему, снабжен муфтой сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность двух ГТД, обеспечивающая продолжение полета при одном работающем двигателе и любом промежуточном положении поворотных кольцевых каналов 6 с меньшими винтами 7-8 и вращение среднего и большего 14-15 несущих винтов во время переходного режима, что создает возможность осуществления полета или аварийной посадки и тем самым повышается безопасность выполнения полетов. Передача взлетной мощности от двух ГТД к консольной 7-8 и центральной 14-15 группе несущих винтов обеспечивается элементами трансмиссии, включающей: объединительные Т-образные в плане редукторы с соединительными поперечными валами, связывающими соответствующие консольные редукторы меньших 7-8 винтов и главный редуктор с поворотным V-образным редуктором центральных среднего 14 и большего 15 несущих винтов (на фиг. 1 не показаны).
Управление турбовинтовой БВВП обеспечивается общим и дифференциальным изменением шага консольной 7-8 и центральной 14-15 группы несущих винтов и отклонением рулевых поверхностей: флапперонов 9, работающих в зоне активного обдува меньших винтов 7-8. При крейсерском полете подъемная сила создается крылом 1 с консолями 4 в схеме «бесхвостка» и авторотирующими средним 14 большим 15 несущими винтами, вращающимися над крылом 1 (см. фиг. 1а), горизонтальная тяга - меньшими винтами 7-8, на режиме висения только несущими винтами 7-8 и 14-15, на режиме перехода - крылом 1 и несущими винтами 7-8 и 14-15. При переходе к вертикальному взлету-посадке (висению) в крыле 1 его закрылок 2 и флаппероны 9 отклоняются на максимальные их углы синхронно с поворотов меньших винтов 7-8 от горизонтального положения, которые, поворачиваясь вверх, устанавливают ось их вращения вертикально параллельно плоскости симметрии (см. фиг. 1б). После установки поворотных меньших винтов 7-8 в данное положение и создания подъемной тяги со средним 14 и большим 15 несущими винтами обеспечиваются вертолетные режимы полета. При этом несущие винты 14-15 и консольные меньшие флюгерно-реверсивные винты 7-8 имеют взаимно противоположное их вращение между соответствующими винтами (см. фиг. 1б). Поворотные кольцевые каналы 6 с меньшими винтами 7-8 отклоняется от горизонтального положения вверх в вертикальное на угол +90° и на угол +45° соответственно при выполнении технологии ВВП и КВП на вертолетных и винтокрылых режимах полета БВВП в перегрузочном его варианте.
При висении на вертолетных режимах полета продольное управление БВВП осуществляется изменением шага несущих винтов среднего 14 и большего 15, путевое управление - соответствующим дифференциальным отклонением рулевых поверхностей 9, обдуваемых меньшими винтами 7-8. Поперечное управление обеспечивается несущими винтами левым 7 и правым консольной группы, осуществляющими поперечную балансировку при одновременном изменении шага винтов этой группы. После вертикального взлета и набора высоты для перехода на крейсерский режим полета поворотные кольцевые каналы 6 с меньшими винтами 7-8 синхронно устанавливаются в горизонтальное положение (см. фиг. 1б). После чего убирается закрылок 2 крыла 1 и затем производится горизонтальный скоростной полет, при котором путевое управление обеспечивается отклонением цельноповоротных вертикальных килей 22. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением рулевых поверхностей 9 соответственно. На крейсерских режимах скоростного полета БВВП при создании горизонтальной маршевой тяги его меньшие винты 7-8 и несущие 14-15 имеют взаимно противоположное их вращения в каждой их группе винтов и тем самым увеличивают КПД тяговых и несущих винтов, устраняют гироскопический эффект и обеспечивают более плавное обтекание крыла 1 с внешними консолями 4 в схеме «бесхвостка» и весьма повышают эффективность воздушных винтов изменяемого шага в движительной 7-8 и несущей 14-15 системах.
Таким образом, многофункциональная БВВП, выполненная по концепции распределенной тяги разновеликих винтов, размещенных в продольно-поперечной схеме РТРВ-Х2+2, имеющей пару меньших винтов в поворотных кольцевых каналах и пару перекрещивающихся несущих винтов, снабжена возможностью преобразования ее полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию двухвинтового винтокрыла или крылатого автожира, имеющего отклоненные вперед по полету несущие винты двухвинтовой движительно-несущей системы, но и меньшие винты, создающие с соответствующими несущими средним и большим винтами наклонную и пропульсивную тяги, но и маршевую тягу для скоростного крейсерского полета. Выбор такой аэродинамической схемы БВВП исполнения РТРВ-Х2+2 не случаен, так как подобная компоновка исключает потерю подъемной силы из-за срыва потока с отступающих лопастей несущих двухлопастных разновеликих винтов на режиме горизонтального полета, компенсируя оную их противоположным вращением, и обладает аэродинамической симметрией. Меньшие флюгерно-реверсивные винты в поворотных кольцевых каналах, создающие маршевую горизонтальную тягу, обеспечивают необходимое как повышение скорости горизонтального полета, так и уменьшение дистанции при посадке с пробегом. Несущий центроплан-отсек находится вблизи центра масс, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать выполнение технологии ВВП и КВП.
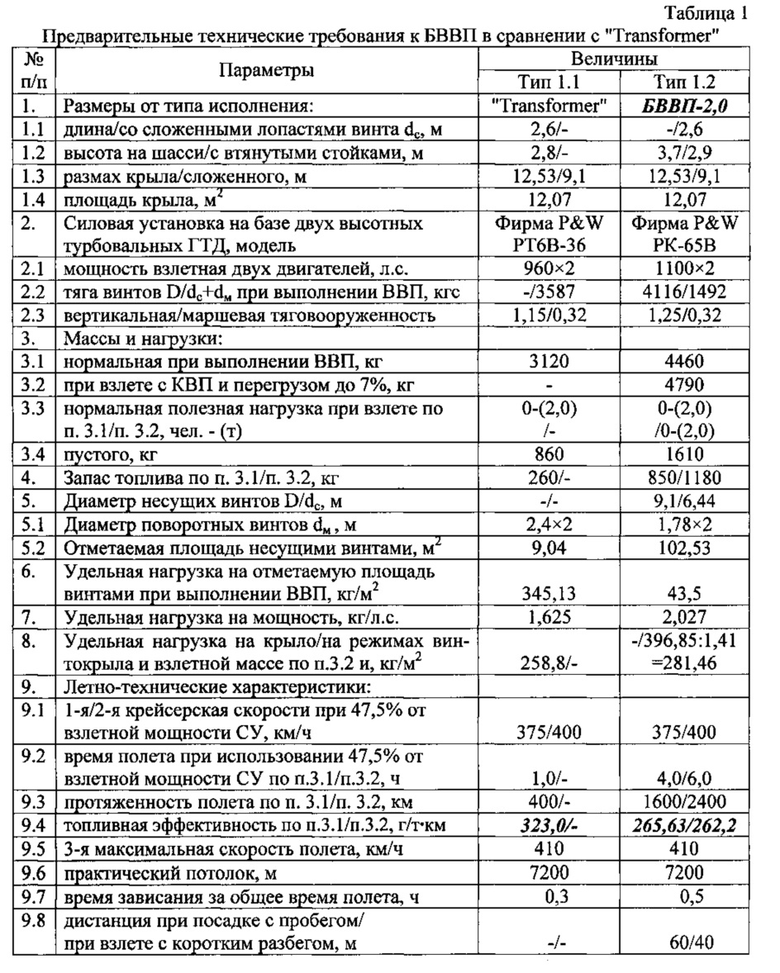
Поэтому при сравнении с беспилотной системой "Transformer ТХ" сопоставимая БВВП-2,0 (см. табл. 1) имеет не только ГТД с мощностью N=1100 л.с. ×2, но и специальные лопасти несущих винтов. Взлетный вес "Transformer ТХ" не превысит 3120 кг при мощности СУ, равной N=1920 л.с., удельной нагрузке на мощность ρN=1,62 кг/л.с. и двумя винтами dм=2,4 м, топливная эффективность составит 323,0 г/т⋅км. У многофункциональной БВВП с взлетным весом Gвз=4460 кг и ПН=2,0 т при удельной нагрузке на мощность ρN=2,02 кг/л.с. и винтами, меньшими dм=l,78×2 м, средним dc=6,44 м и большим D=9,l м, топливная эффективность составит 265,63 г/т⋅км.
Несомненно, с течением времени широкое использование комбинированных взамен турбовинтовых СУ позволит в многофункциональных БВВП и коммерческих ТВВП и особенно с выносными винтовентиляторами в поворотных кольцевых каналах и газодинамическим их приводом от двух ГТД его СУ, упрощая конструкцию их трансмиссии, добиться снижения массы самой СУ, повышения скорости до 435 км/ч, дальности полета до 1740 км и топливной эффективности, что немаловажно для скоростных ТВВП с возможным их использованием при времени их полета до 4 или 6 часов, представляется возможным при базировании, например, ТВВП-2,0 на УДК-вертолетоносцах использовать их для транспортно-десантных операций, а ТВВП-4,0 с двумя турбовальными ГТД ВК-2500 - для экстренного снабжения авианесущих кораблей в противокорабельных или противолодочных морских авианосных системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям винтокрылых летательных аппаратов. Беспилотный комбинированный винтокрыл имеет два винта в поворотных кольцевых каналах, смонтированных по бокам несущего центроплана-отсека, в котором размещаются двигатели и главный редуктор с валами, проложенными внутри крыла. Винтокрыл выполнен по двухбалочной схеме с движительно-несущей системой и концепции распределенной тяги разновеликих винтов (РТРВ), расположенных по схеме РТРВ-Х2+2, включающей наряду с двумя меньшим винтами в поворотных кольцевых каналах разновеликие винты, установленные на поворотном секторе-пилоне, смонтированном на центроплане крыла над центром масс. Пилон снабжен редуктором перекрещивающихся винтов с верхним расположением V-образных выходных валов, имеющих угол между их осями вращения равный 30°. Достигается упрощение продольной балансировки при висении и улучшение поперечно-продольной управляемости. 1 ил., 1 табл.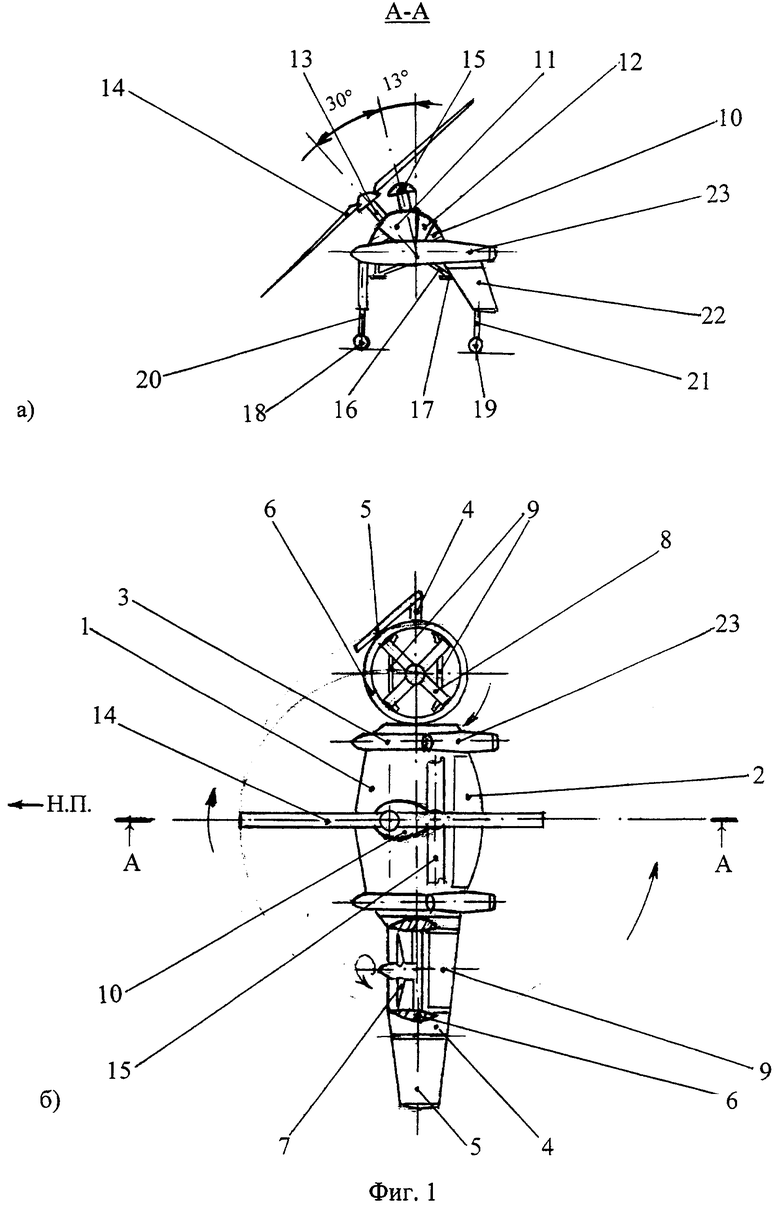
Беспилотный комбинированный винтокрыл, имеющий два винта в поворотных кольцевых каналах, смонтированных по бокам несущего центроплана-отсека, в котором размещаются двигатели и главный редуктор с валами, проложенными внутри крыла и распределяющими мощность между винтами, при повороте которых он преобразовывается в двухвинтовую несущую схему для подъема и перевозки грузовых аэродинамических контейнеров, прикрепляемых между шасси под несущим центропланом-отсеком, отличающийся тем, что выполнен по двухбалочной схеме с движительно-несущей системой и концепции распределенной тяги разновеликих винтов (РТРВ), расположенных по схеме РТРВ-Х2+2, включающей наряду с двумя меньшими винтами в поворотных кольцевых каналах на консолях крыла, смонтированных по внешним бортам разнесенных балок, разновеликие винты, установленные на поворотном секторе-пилоне, смонтированном в переднем продольном секторном проеме каплевидного в плане центрального пилона с округленной его вершиной, установленного на центроплане крыла над центром масс, и снабженном редуктором перекрещивающихся винтов с верхним расположением V-образных выходных валов, имеющих как бы в V-образном редукторе при виде сбоку соответствующий угол между их осями вращения, равный 30°, и обеспечивающих размещение среднего и большего винтов над крылом в верхней полусфере соответственно от вертикали в первом и втором квадрантах и возможность их отклонения вдоль плоскости симметрии вперед и обратно таким образом, что как при совмещении оси симметрии V-образного редуктора и вертикали, так и при отклонении вперед, размещая средний и больший винты в первом квадранте, соответственно для выполнения как вертикального взлета/посадки (ВВП), так и короткого взлета/посадки (КВП) с обеспечением необходимого вклада в подъемные и тяговые усилия дисками среднего и большего винтов, наклоняемых совместно только к передним частям разнесенных балок, но и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию двухвинтового винтокрыла или крылатого автожира, имеющего и отклоненные от вертикали вперед по полету оси вращения среднего и большего винтов V-образного редуктора соответственно на угол 35° и 5° или на угол 43° и 13°, и меньшие винты двухвинтовой движительной системы в упомянутых поворотных кольцевых каналах, имеющих как на их выходах рулевые поверхности, установленные снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала, выполненные с отогнутыми их концами к центру последнего и обеспечивающие их синфазное и дифференциальное отклонение, так и с внешних бортов кольцевых каналов концевые части крыла, складывающиеся вперед по полету к бокам последних при транспортировании и создании меньшими винтами вертикальной тяги при выполнении ВВП совместно с подъемными силами среднего и большего несущих винтов, имеющих уравновешенные пропульсивные их тяги, и обратно, при этом в центральной группе винтов, включающей средний и больший несущие винты, выполненные с жестким креплением лопастей без изменения циклического их шага и с их диаметрами, определяемыми из соотношения d=0,7065×D, м (где d и D - диаметры соответственно среднего и большего несущих винтов), имеют при выполнении ВВП оси вращения как среднего, так и большего двухлопастных несущих винтов, отклоненных вперед и назад по полету от вертикальной оси V-образного редуктора и выполненных с возможностью свободного их вращения и прохождения наступающих лопастей соответственно как над передней, так и задней кромками центроплана и, тем самым, создающих при выполнении ВВП и зависании гармоничное сочетание продольного и путевого управления, при этом между разновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения, как в меньшей, так и в центральной группе винтов, но и одинаковом их вращении между разновеликими винтами диагонально расположенной группы винтов, например, при виде сверху по часовой стрелке и против соответственно между винтами правым меньшим со средним несущим и между левым меньшим с большим несущим винтами, размещенными в плане с соответствующими их двумя лопастями вдоль и перпендикулярно оси симметрии, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих несущих винтов бортов разнесенных балок и консолей крыла с задней кромкой обратной стреловидности, причем консоли крыла с поворотными кольцевыми каналами, снабженными флапперонами на их выходе, представляют собой с межбалочным центропланом, имеющим стреловидную переднюю и округлую с соответствующим закрылком заднюю кромки, как бы аэродинамическую схему «бесхвостка» с поворотными консолями крыла, при этом для упрощения его транспортирования средний несущий винт выполнен трансформируемым и снабжен тормозной системой и системой складывания соответствующих двух его лопастей таким образом, что после его остановки и фиксирования его лопастей вдоль оси симметрии осуществляется одновременный поворот передней и задней его лопастей по часовой стрелке при виде сверху и их размещение параллельно соответствующим лопастям большего винта, а его четырехопорное велосипедной схемы колесное шасси, каждая передняя и задняя пара опор которого установлена по соответствующим частям разнесенных балок и имеет телескопические стойки, передняя и задняя пара из которых после их втягивания выполнены убирающимися соответственно в ниши разнесенных балок и вовнутрь цельноповоротных вертикальных килей, смонтированных под разнесенными балками, мощность двигателей, перераспределяемая V- образным редуктором на несущие винты, определяется из соотношения N=0,7065n, кВт, где N и n - мощность, передаваемая соответственно на больший и средний несущие винты, система трансмиссии, включающая наряду с газотурбинными двигателями (ГТД), каждый из которых имеет передний вывод вала для отбора взлетной мощности, смонтирован в задней части соответствующей разнесенной балки и связан посредством муфты сцепления с объединительным Т-образным в плане редуктором, смонтированным в средней части разнесенной балки и образующим с левым и правым валами как бы две Т-образные в плане синхронизирующие трансмиссии, передающие крутящий момент к двум меньшим винтам и к двум среднему и большему несущим винтам, соответственно к редукторам винтов в упомянутых кольцевых каналах и центральному главному редуктору, имеющему поворотный V-образный редуктор с верхним расположением выходных валов для центральной группы несущих винтов.
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| Устройство для измерения ускорений | 1956 |
|
SU110715A1 |
| US 2002011539 A1, 31.01.2002 | |||
| КОМПОЗИЦИЯ ДЛЯ ГЕЛЕВОЙ САЛФЕТКИ, СОДЕРЖАЩЕЙ СУПЕРАБСОРБИРУЮЩЕЕ ГЕЛЕВОЕ ВОЛОКНО | 2016 |
|
RU2719591C2 |

