Геофон представляет собой датчик, часто используемый для операций сейсмической разведки, обычно в качестве составного элемента протяженной линейки таких датчиков. Формой исполнения геофонов обычно является система "масса - пружина", в которой подпружиненная масса выполнена с возможностью перемещения относительно корпуса. Масса может быть магнитной по своей природе либо геофон может быть оснащен магнитом, создающим магнитное поле, которое облегчает мониторинг относительного перемещения массы посредством катушки индуктивности, подсоединенной к корпусу. По мере того, как сейсмические волны попадают на геофон, они смещают массу по отношению к корпусу. Пока частота смещения находится в пределах диапазона чувствительности геофона, данное смещение вызывает перемещение подпружиненной массы по отношению к корпусу. (Примером типового диапазона чувствительности геофона является 3 - 40 Гц. Другими демонстрационными диапазонами являются 20 - 200 Гц и 3 - 13 кГц.). Перемещение магнитной массы по отношению к катушке индуктивности вызывает появление на концевых выводах катушки напряжения, пропорционального относительной скорости массы. Резонансную частоту или резонансные частоты системы "масса - пружина" можно выбирать в расчете на повышение чувствительности датчика на выбранной частоте, однако такие частоты часто являются фиксированным параметром конструкции геофона. Частоты за пределами диапазона датчика по существу подавляются.
Для решения данного вопроса в условиях контролируемой разведочной среды может быть использован подход с применением конструкции, обеспечивающей кривую чувствительности с очень широким диапазоном чувствительности. Однако такой подход может оказаться не подходящим для приложений с сейсмическими измерениями в процессе бурения (seismic-while-drilling, SWD), где от датчика требуется выдерживание высокоинтенсивных ударных и вибрационных нагрузок от среды буровых операций. Для геофона, имеющего кривую с широким диапазоном чувствительности, можно ожидать частых столкновений между подпружиненной массой и корпусом датчика на высокоэнергетическом уровне, чему сопутствует быстрое ухудшение качества работы датчика; либо в противном случае можно ожидать настолько сильного демпфирования, при котором геофон не подходит для использования в качестве сейсмического датчика. Согласно характеру SWD-приложения требуется использование геофона на изменяющейся глубине в буровой скважине. Это приводит к компромиссам при выборе датчиков с подходящей резонансной частотой. В скважине увеличенной глубины сейсмические волны с пониженной частотой подвергаются меньшему затуханию; в то же время, в менее глубокой скважине высокочастотные волны обеспечивают повышенное разрешение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Таким образом, в данном документе раскрыты способы, системы и конструкции геофонов, обеспечивающие настраиваемые резонансные частоты и регулируемое демпфирование. На чертежах:
Фиг. 1 является иллюстрацией среды сейсмических измерений во время бурения (SWD).
Фиг. 2 иллюстрирует размещение геофона в среде нисходящей скважины.
Фиг. 3 является схематическим изображением геофона.
Фиг. 4 иллюстрирует кривые частотной характеристики для геофона с настраиваемой резонансной частотой.
Фиг. 5 представляет собой логическую блок-схему иллюстративного SWD-способа, в котором используется геофон с настраиваемой резонансной частотой.
Следует понимать, однако, что конкретные варианты осуществления, приведенные на чертежах, и их подробное описание не ограничивают собой рамки раскрытия изобретения. Наоборот, они предоставляют специалисту со средним уровнем знаний в данной области основу для определения альтернативных форм, эквивалентов и модификаций, входящих вместе с одним или большим количеством приведенных вариантов осуществления в объем патентной охраны изобретения, определяемый прилагаемой формулой изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В данном документе раскрыты различные методики настройки резонансной частоты, которые могут дополнительно обеспечить регулируемое демпфирование, облегчающее использование геофонов в среде сейсмических измерений во время бурения (SWD). Архитектура геофона, раскрытая по меньшей мере в некоторых вариантах осуществления изобретения, включает в себя два или большее количество индуктивных узлов, причем каждый индуктивный узел содержит магнит в конфигурации "пружина - масса" внутри катушки индуктивности, причем магнит и катушка индуктивности выполнены с возможностью перемещения относительно друг друга.
Магнит для каждого индуктивного узла соединен с магнитом по меньшей мере одного другого индуктивного узла посредством жесткого или упругого элемента связи. По меньшей мере в одном варианте осуществления упругим элементом связи является пружина. Данный элемент связи обеспечивает заданному индуктивному узлу возможность управлять резонансной частотой соседнего индуктивного узла или узлов путем настройки катушки индуктивности заданного индуктивного узла на демпфирование перемещения. Такое демпфирование может быть обеспечено, например, путем замыкания накоротко прилегающей катушки или путем регулировки тока в катушке для противодействия перемещению магнита. При работе в режиме считывания оставшийся индуктивный узел может обеспечивать вывод сигналов геофонного датчика обычным образом. Однако по меньшей мере в некоторых из раскрытых вариантов осуществления изобретения имеется дополнительная возможность работы в транспортном режиме, в котором все индуктивные узлы демпфируются, чтобы заблокировать перемещения масс по отношению к корпусу и защитить тем самым геофон от повреждений при размещении внутри буровой скважины или при извлечении из ее.
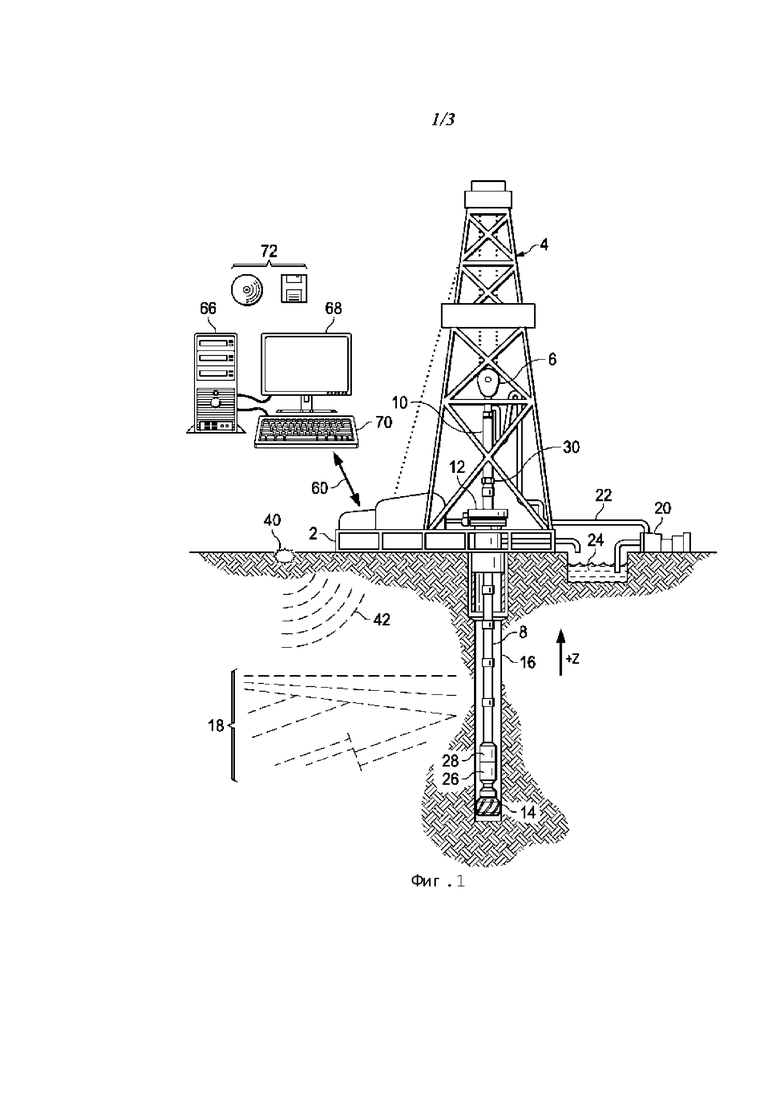
На фиг. 1 представлена в иллюстративной форме SWD-среда, содержащая буровую платформу 2, оснащенную краном-дерриком 4, удерживающим лебедку 6, используемую для подъема и опускания бурильной колонны 8 через ведущую трубу 10. Бурильная колонна 8 опускается на лебедке 6 через роторный стол 12, входящий в зацепление с ведущей трубой 10, чтобы вращать бурильную колонну и тем самым приводить в действие процесс бурения. К нижнему концу бурильной колонны 8 подсоединено буровое долото 14, вращающееся вместе с бурильной колонной и проделывающее буровую скважину 16 сквозь различные формации 18. Насос 20 обеспечивает циркуляцию буровой жидкости по подающей трубе 22 через вертлюг к ведущей трубе 10, вниз через внутреннее пространство бурильной колонны 8, через отверстия в буровом долоте 14, далее обратно на поверхность по затрубному пространству вокруг бурильной колонны 8 и в сточную емкость 24. Буровой раствор переносит буровой шлам из ствола скважины в сточную емкость 24 и способствует сохранению целостности ствола 16 скважины.
Комплектный каротажный инструмент 26 встроен в нижнюю часть бурильной колонны вблизи долота 14. По мере того, как буровое долото 14 проделывает буровую скважину сквозь формации 18, комплектный каротажный инструмент 26 осуществляет сбор результатов измерений, относящихся к различным свойствам формации 18, а также к местоположению и пространственной ориентации инструмента и к различным другим условиям бурения. Во время пауз в буровом процессе (например, во время удлинения бурильной колонны 8 путем добавления дополнительных секций труб) комплектный каротажный инструмент 26 осуществляет сбор результатов сейсмических измерений с помощью одного или большего количества геофонов.
В заранее определяемые или измеряемые промежутки времени в рамках пауз в буровом процессе источник 40 сейсмических сигналов (например, поверхностный вибратор или взрывное разгрузочное устройство) включается для генерации "выброса", то есть, пучка сейсмической энергии, распространяемого в виде сейсмических S-волн и/или P-волн 42 вовнутрь подземного пласта. Эти волны видоизменяются вследствие частичной передачи, отражения, преломления и изменения типа волн при изменениях акустического импеданса - например, таких, которые вызываются границами пластов, интерфейсами текучих сред и разрывными нарушениями. Комплектный каротажный инструмент 26 включает в себя сейсмические датчики (такие, как раскрытые здесь геофоны) для обнаружения энергии сейсмических волн, достигающих компоновки низа бурильной колонны. Данные можно записывать в скважинную память при генерации каждого "выброса" на поверхности. В комплектном каротажном инструменте 26 (и в других компонентах системы) имеется высокоточный синхронизатор для обеспечения того, чтобы отсчет времени записываемых результатов измерений можно было синхронизировать относительно отсчета времени "выброса". Возможным подходом к синхронизации является обеспечение настройки синхронизатора компоновки низа бурильной колонны на глобальный стандарт (например, на глобальную систему определения местоположения (GPS)) перед опусканием вовнутрь буровой скважины.
В некоторых вариантах осуществления возможно добавление в комплектацию бурильной колонны вспомогательного элемента 28 телеизмерений в гидроимпульсном канале связи для передачи результатов измерений к наземному приемнику 30 и для получения команд от наземного оборудования. Вспомогательный элемент 28 телеизмерений работает путем модулирования потока буровой текучей среды для формирования импульсов давления, распространяемых вдоль столба текучей среды в скважине между компоновкой низа бурильной колонны и наземным оборудованием. (Для телеизмерений в гидроимпульсном канале связи обычно требуется поток буровой текучей среды, поэтому они не выполняются при выключенном насосе). Известны и другие скважинные телеметрические системы, которые могут быть использованы.
Приемник (приемники) 30 телеизмерений в гидроимпульсном канале связи соединен (соединены) с системой сбора данных, которая преобразует к цифровому виду принятый сигнал и пересылает его наземной компьютерной системе 66 по каналу 60 проводной или беспроводной передачи. Канал 60 может поддерживать также передачу команд и информации о настройке от компьютерной системы 66 к компоновке низа бурильной колонны. Наземная компьютерная система 66 работает в соответствии с программным обеспечением (в накопителе, показанном на фиг. 1 в виде съемного энергонезависимого запоминающего носителя 72 информации) для мониторинга скважинных инструментов 26, 28 и управления ими. Система 66 содержит дисплей 68 и устройство 70 пользовательского ввода, обеспечивающие взаимодействие оператора с управляющими программами 72 системы.
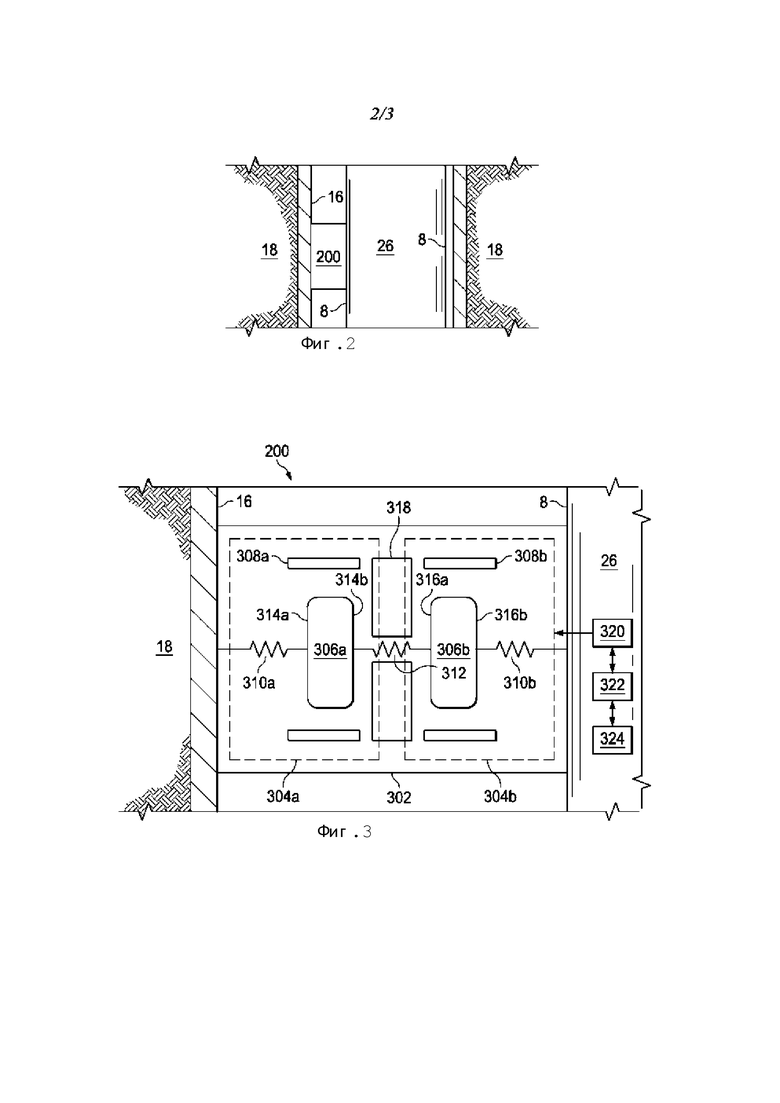
На фиг. 2 изображен в укрупненном виде комплектный каротажный инструмент 26 в скважинной части SWD-среды, показанной на фиг. 1. Как отмечено ранее, возможны паузы в буровом процессе на периоды сбора сейсмической информации. Во время такой паузы комплектный каротажный инструмент 26 устанавливает акустическую связь со стенкой 16 буровой скважины. Фиг. 2 иллюстрирует установление акустической связи путем выдвигания рычага в радиальном направлении наружу от бурильной колонны 8 так, чтобы обеспечить механический контакт датчика (датчиков), например, геофона 200 со стенкой буровой скважины. Чтобы минимизировать акустическую проводимость вдоль рычага от бурильной колонны 8 к датчику (датчикам), возможно демпфирование связи между рычагом и бурильной колонной, например, с помощью гидравлических элементов. Геофон 200 может представлять собой одноосный геофон с осью, перпендикулярной стенке буровой скважины. Возможны другие пространственные ориентации, и на практике возможно применение двухосных или трехосных геофонов в сборе, чтобы обеспечить считывание во множестве взаимно перпендикулярных направлений.
Геофон не обязательно следует монтировать на рычаге; вместо этого можно встраивать его в часть бурильной колонны, прижимаемую к противоположной стенке. Хотя предпочтительной является прямая механическая связь между геофоном и буровой скважиной, допускаются иные варианты исполнения с применением косвенной связи. Например, допускается расположение бурильной колонны, упирающейся в забой буровой скважины для предоставления геофону акустической связи через буровое долото.
На фиг. 2 изображена конфигурация инструмента, подходящая для использования в вертикальной буровой скважине. В горизонтальных или наклонных скважинах можно ожидать прижатия комплектного инструмента 26 к нижней стенке буровой скважины во время пауз в буровом процессе, обеспечивающего надлежащую связь посредством вертикально направленного веса инструмента. Это значит, что в конфигурациях инструментов для использования в таких буровых скважинах могут отсутствовать рычаги или другие имеющие свободу относительного перемещения компоненты, которые могут оказаться уязвимыми к повреждениям. Более того, по меньшей мере в некоторых рассмотренных вариантах реализации SWD-системы используется линейка из множества геофонов, рассредоточенных по длине буровой колонны.
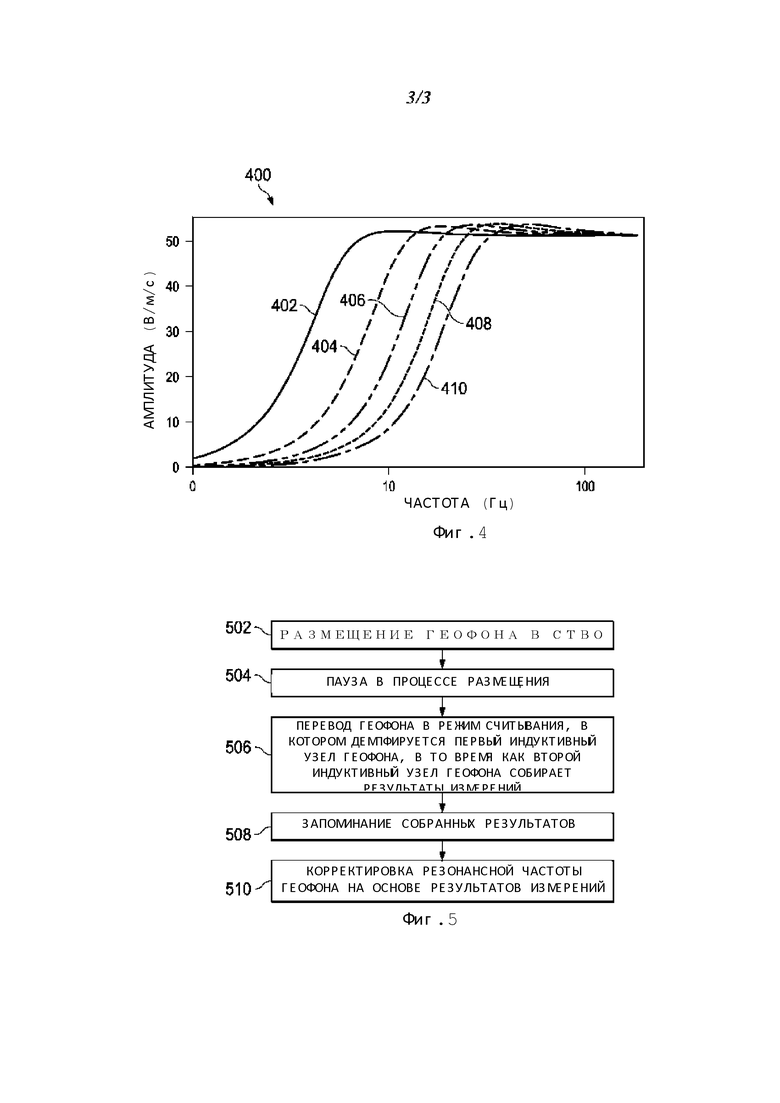
На фиг. 3 схематически изображен геофон 200, соответствующий одному или большему количеству вариантов осуществления изобретения. Как показано, геофон 200 включает в себя корпус 302 с установленными в нем первым индуктивным узлом 304a и вторым индуктивным узлом 304b (они очерчены штриховыми линиями). Индуктивные узлы 304a,b скомпонованы с разнесением по горизонтали вдоль горизонтальной оси корпуса 302, один конец которого акустически связан прямым или косвенным образом со стенкой буровой скважины 16. По мере того, как сейсмическая энергия 42, сгенерированная источником 40 сейсмических колебаний (см. фиг. 1) смещает корпус 302 вдоль его горизонтальной оси, геофон 200 получает возможность обнаружения этой энергии благодаря работе индуктивных узлов
Каждый из индуктивных узлов 304a,b содержит соответствующий магнит 306a,b, ориентированный вдоль горизонтальной оси и расположенный внутри соответствующей катушки индуктивности 308a,b, причем магнит 306a,b и катушка индуктивности 308a,b выполнены с возможностью перемещения относительно друг друга. Под "магнитом" в используемом здесь смысле можно понимать любую массу или материал, создающий магнитное поле - такой, как ферромагнитные материалы (например, железо, никель, кобальт). При перемещении магнитного поля магнита 306a,b относительно катушки индуктивности 308a,b генерируется сигнал, пропорциональный скорости магнитного поля. Ожидается, что вертикальное перемещение по отношению к корпусу будет подавляться благодаря геометрии пружин.
Как показано, каждый магнит 306a,b соединен с одним концом корпуса 302 геофона через соответствующую пружину 310a,b и магниты 306a,b соединены между собой элементом связи 312. В частности магнит 306a и магнит 306b разнесены между собой по горизонтали вдоль оси корпуса 302, левая сторона 314a магнита 306a соединена с левой стенкой корпуса 302 (то есть, ближайшей к буровой скважине 16) через пружину 310a, правая сторона 314b магнита 306a соединена с левой стороной магнита 306b через элемент связи 312 и правая сторона магнита 306b соединена с правой стенкой корпуса 302 (то есть, ближайшей к бурильной колонне 8) через пружину 310b. Примерами пружин 310a,b, не подразумевающими никаких ограничений, могут являться пластинчатая пружина, цилиндрическая пружина, консольная пружина и т.п. Специалистам в данной области будет понятно, что среди вариантов исполнения, альтернативных рассмотренному здесь, возможен такой, в котором магнит 306a,b каждого индуктивного узла 304a,b является стационарным, а соответствующая катушка индуктивности 308a,b присоединена с возможностью перемещения к корпусу 302, например, через пружины, аналогичные описанным выше.
Каждый индуктивный узел 304a,b может быть независимо управляемым и переключаемым между “режимом считывания” и “режимом демпфирования”. В режиме считывания индуктивный узел 304a,b способен измерять относительное перемещение между соответствующим ему магнитом 306a,b и катушкой индуктивности 308a,b. В режиме демпфирования индуктивный узел 304a,b по меньшей мере частично запрещает перемещение магнита 306a,b и катушки 308a,b относительно друг друга. В иллюстративном режиме демпфирования катушка индуктивности 308a,b замыкается накоротко, что инициирует перемещение магнита 306a,b для индуцирования тока, который в свою очередь генерирует поле для противодействия перемещению магнита.
В ином варианте исполнения режим демпфирования может включать в себя поданный извне ток для запрета перемещения магнита 306a,b. Такой ток может быть получен с использованием канала обратной связи, позволяющего поддерживать схему для определения и подачи тока, достаточного для запрета перемещения магнита. Когда геофон 200 не используется для обнаружения сейсмической энергии (то есть, работает не в “режиме считывания”), оба индуктивных узла 304a,b могут быть переведены в режим демпфирования. В других документах данное состояние может быть названо “транспортным режимом” или “режимом бурения”.
Архитектура геофона 200 может поддерживать различные настройки. Например, одна настройка включает в себя настройку первого индуктивного узла 304a в режиме считывания, в то время как второй индуктивный узел 304b находится в режиме демпфирования. Аналогично, первый индуктивный узел 304a может быть настроен на режим демпфирования при том, что второй индуктивный узел 304b настроен на режим считывания. Поскольку узлы 304a,b соединены между собой через элемент связи 312, демпфирование одного индуктивного узла 304a,b приводит по существу к увеличению жесткости пружины и изменению резонансной частоты считывающего индуктивного узла 304a,b.
В конфигурации "масса - пружина" каждого индуктивного узла 304a,b генерируется резонансная частота  , где
, где  - резонансная частота геофона, K - жесткость пружины и M обозначает массу магнита. Связь масс в рассмотренной выше архитектуре позволяет использовать один индуктивный узел 304a,b для изменения резонансной частоты () считывающего индуктивного узла 304a,b с целью обеспечить измерения при повышенном отношении сигнала к шуму (SNR). Запрет перемещения магнита 306a,b в одном индуктивном узле 304a,b можно интерпретировать как влияние на жесткость пружины (K) считывающего индуктивного узла 304a,b и сопутствующее этому влиянию изменение резонансной частоты геофона 200.
- резонансная частота геофона, K - жесткость пружины и M обозначает массу магнита. Связь масс в рассмотренной выше архитектуре позволяет использовать один индуктивный узел 304a,b для изменения резонансной частоты () считывающего индуктивного узла 304a,b с целью обеспечить измерения при повышенном отношении сигнала к шуму (SNR). Запрет перемещения магнита 306a,b в одном индуктивном узле 304a,b можно интерпретировать как влияние на жесткость пружины (K) считывающего индуктивного узла 304a,b и сопутствующее этому влиянию изменение резонансной частоты геофона 200.
В некоторых вариантах осуществления изобретения геофон 200 может дополнительно содержать магнитный экран 318. Как показано, магнитный экран 318 располагается между первым и вторым индуктивными узлами 304a,b, но не создает помех элементу связи 312. Магнитный экран 318 предотвращает или ослабляет электромагнитное взаимодействие между индуктивными узлами 304a,b.
Геофон соединяется с другими компонентами комплектного каротажного инструмента 26 (например, для управления этим инструментом и запоминания результатов измерений). Например, индуктивные узлы 304a,b могут быть электрически связаны с устройством 320 управления демпфированием, контроллером 322 и запоминающим устройством 322. Устройство 320 управления демпфированием, контролер 322 и запоминающее устройство 322 могут быть расположены вниз по стволу скважины в такой же компоновке, как внутри комплектного каротажного инструмента 26, расположены вверх по стволу скважины, например, вместе с наземной компьютерной системой 66 или в ее составе либо размещены с комбинированием этих компоновок.
Как показано, устройство 320 управления демпфированием связано коммуникационными средствами с обоими индуктивными узлами 304a,b и контроллером 322. Устройство 320 управления демпфированием может принимать сигналы управления от контроллера 322 и в ответ на них действовать в качестве источника тока для одного или обоих индуктивных узлов 304a,b в режиме демпфирования.
Контроллер 322 может быть дополнительно связан коммуникационными средствами с запоминающим устройством 324 для запоминания собранных результатов измерений для геофона. В некоторых вариантах осуществления контроллер 322 включает в себя и/или выполняет программу или цикл управления с целью изменить уровень демпфирования в отношении одного или обоих индуктивных узлов 304a,b для обеспечения требуемой резонансной частоты геофона 200. Например, если предположить, что первый индуктивный узел 304a настроен на режим считывания, а второй индуктивный узел 304b настроен на режим демпфирования, то контроллер 322 оказывается в состоянии принимать результаты измерений от первого индуктивного узла 304a и диагностировать низкое отношение сигнала к шуму (SNR). Чтобы повысить значение SNR, контроллер 322 может в итеративном режиме повышать или понижать уровень демпфирования для второго индуктивного узла 304b посредством командного сигнала, посылаемого в устройство 320 управления демпфированием. Данный процесс можно повторять, пока не будет получено приемлемое значение SNR. Такая возможность регулирования может быть обеспечена путем изменения числа витков замыкаемой накоротко катушки индуктивности или путем изменения импеданса в канале обратной связи схемы, которая приводит в действие катушку индуктивности в режиме демпфирования.
Геофон 200 может быть дополнительно способен к выполнению тестов самодиагностики (например, проверки исправности или точности геофона). Например, если предположить на этот раз, что второй индуктивный узел 304b настроен на режим демпфирования, а первый индуктивный узел 304a настроен на режим считывания, то контроллер 322 оказывается в состоянии генерировать сигнал управления к устройству 320 управления демпфированием, индуцирующему ток к магнитной катушке 308b второго индуктивного узла 304b, вызывая тем самым колебательное движение или перемещение соответствующего магнита 306b. Как следствие этого, связанный с данным магнитом магнит 306a первого индуктивного узла 304a также перемещается и генерирует ответный сигнал. Ответный сигнал измеряется контроллером 322 и сравнивается с ожидаемым или предварительно сохраненным значением измерения с целью определить правильность функционирования геофона, причем получение от геофона ожидаемых значений измерения может указывать на нормальное функционирование, а получение неожиданного значения измерения может указывать на повреждение геофона или на необходимость его калибровки.
На фиг. 4 приведен график 400, демонстрирующий сдвиги кривой частотной характеристики геофона 200 (см. фиг. 3) при переключении первого и второго индуктивных узлов 304a,b между режимами считывания и демпфирования. График 400 содержит пять образцов кривых частотной характеристики (кривую 402 первой характеристики, кривую 404 второй характеристики, кривую 406 третьей характеристики, кривую 408 четвертой характеристики и кривую 410 пятой характеристики) для одного и того же геофона. По оси X представлены в логарифмическом масштабе значения частоты сигнала в Гц, а по оси Y представлена измеренная амплитуда сигнала в вольтах на метр в секунду (В/м/с).
Кривая 402 первой характеристики иллюстрирует частотную характеристику по умолчанию геофона 200, когда оба индуктивных узла 304a,b являются считывающими. Кривые второй и третьей частотных характеристик 404 и 406 соответственно иллюстрируют частотную характеристику в состоянии, когда первый индуктивный узел 304a является считывающим и второй индуктивный узел 304b демпфирован. В частности, кривая 404 второй частотной характеристики отображает характеристику второго индуктивного узла 304b, демпфируемого путем замыкания накоротко соответствующей катушки индуктивности 308b. Однако кривая 406 третьей частотной характеристики отображает демпфирование второго индуктивного узла 304b путем подачи тока, например от управляющего устройства 320 (см. фиг. 3) в катушку индуктивности 308b, запрещая тем самым перемещение второго магнита 306b. Как следствие этого, перемещение первого магнита 306a также сильно затрудняется (то есть, возрастает константа K пружины), и кривая частотной характеристики смещается вправо, как показанная кривая 406 третьей частотной характеристики.
Появление кривой 408 четвертой частотной характеристики возможно при перемене местами состояний индуктивных узлов 304a,b - когда первый индуктивный узел 304a демпфирован посредством соответствующей катушки индуктивности 308a, а второй индуктивный узел 304b является считывающим. Примечательно, что при демпфировании первого индуктивного узла получается другая характеристика, нежели при демпфировании второго индуктивного узла, например, вследствие того, что магниты 306a,b индуктивных узлов 304a,b различаются между собой по весу (это значит, что различаются между собой значения магнитной массы M в уравнении резонансной частоты, следствием чего являются различающиеся между собой частотные сдвиги). Кривая 410 пятой частотной характеристики может появляться в результате того, что оба индуктивных узла 304a и 304b находятся в режиме демпфирования, что может быть предпочтительным при бурении.
Теперь обратимся к фиг. 5, где представлен пример логической блок-схемы 500 для способа эксплуатации геофона с настраиваемой резонансной частотой и управления его работой. Геофон может быть аналогичен геофону 200, показанному на фиг. 2 и 3, причем геофон содержит два или большее количество индуктивных узлов, каждый индуктивный узел содержит магнит, смонтированный внутри катушки индуктивности, и при этом каждый магнит связан с магнитом по меньшей мере одного другого индуктивного узла. Следует понимать, что способ 500 может быть изменен, например, путем сокращения или увеличения количества его шагов или изменения очередности выполнения шагов.
Как показано, способ 500 включает в себя размещение геофона внутри ствола скважины (шаг 502). Перед началом или во время размещения геофон можно настроить так, чтобы все индуктивные узлы были настроены на демпфирование, что по существу заранее исключает перемещение магнита и предотвращает повреждение датчика. При проходке до предварительно определяемой глубины размещение геофона временно прекращают, чтобы собрать результаты измерений, как на шаге 504.
На шаге 506 геофон переводят в режим считывания путем демпфирования первого индуктивного узла, в то время как второй индуктивный узел считывает сейсмические сигналы, или естественные вибрации земли, и собирает результаты измерений. В некоторых вариантах осуществления возможно регулирование уровня демпфирования первого индуктивного узла с помощью устройства управления демпфированием, установленного между геофоном и контроллером и связанного с ними коммуникационными средствами. Устройство управления демпфированием действует, например, в соответствии с получаемыми от контроллера управляющими сигналами, как описано в данном документе.
На шаге 508 возможна запись собранных результатов измерений на хранение, например, в запоминающее устройство, как описано в данном документе. Сохраняемые результаты измерений могут быть переданы на поверхность для дополнительной обработки и/или могут быть проанализированы для корректировки резонансной частоты, как описано в данном документе. Например, контроллер может дать устройству управления демпфированием указание на корректировку уровня демпфирования, исходя из требуемого предварительно определяемого значения резонансной частоты и/или порогового отношения сигнала к шуму. Соответственно, в некоторых вариантах осуществления контроллер может генерировать откорректированный выходной сигнал, основываясь целиком или частично на результате измерения, записанном на хранение на шаге 504. При определении нового уровня демпфирования контроллер может использовать результаты измерений в реальном времени или обработанные результаты измерений.
Дополнительные варианты построения геофона будут понятны специалистам в данной области. Например, способ 500 может включать в себя демпфирование второго индуктивного узла при одновременном считывании сейсмических вибраций первым индуктивным узлом. Способ 500 может включать в себя также демпфирование и первого, и второго индуктивного узла, что может быть предпочтительным перед началом или во время выполнения измерений (то есть, во время бурения) с целью предотвратить перемещение магнитов и исключить возможное повреждение геофона. Более того, в способе 500 возможно также использование теста самодиагностики, при котором один индуктивный узел действует в режиме демпфирования для перемещения соответствующего магнита, при котором перемещается также магнит другого индуктивного узла, связанного с первым узлом. После измерения ответного сигнала и сравнения его с ожидаемыми или предсказанными данными получение ожидаемых значений измерения может указывать на нормальное функционирование геофона, а получение неожиданного значения измерения может указывать на повреждение геофона или на необходимость его калибровки.
Резюмируя вышеизложенное, предлагается множество связанных между собой индуктивных узлов, каждый из которых работает в режиме демпфирования во время транспортировки. В режиме считывания по меньшей мере один узел настроен на считывание, а другой опционально настраивают на демпфирование. Уровень демпфирования можно регулировать для настройки чувствительности геофона на требуемый диапазон.
Другие многочисленные изменения, эквивалентные и альтернативные варианты исполнения будут понятны специалистам в данной области техники после полного ознакомления с приведенным выше раскрытием изобретения. Например, приведенное выше описание сконцентрировано на SWD-приложениях раскрытых методик, однако они применимы также к операциям на каротажном кабеле, при выполнении которых описанный геофон и его управляющая часть являются составным элементом зонда для кабельного каротажа. Более того, изложенные здесь идеи применимы также к мониторингу операций в скважинах, при котором описанный геофон и его управляющая часть являются составным элементом промысловой скважины, нагнетательной скважины или наблюдательной скважины. По меньшей мере в некоторых вариантах реализации не требуется размещение источника 40 (см. фиг. 1) на поверхности, в некоторых рассмотренных вариантах осуществления он является частью бурильной колонны, спускаемого на канате бурового снаряда или состава среды в наблюдательной скважине. Например, скважинные сейсмические подсистемы могут содержать пьезоэлектрический датчик - такой, какой установлен в скважинных инструментах SONIC/BAT и/или Acoustic Caliper фирмы Halliburton. Включение в работу скважинного источника согласуется по времени с отсчетом интервалов записи, например, в режиме с управлением по событиям или в заранее определяемые промежутки времени, настроенные с помощью наземной системы, перед вводом скважинной системы вовнутрь ствола скважины.
В одной разновидности раскрытой архитектуры геофона используются три или большее количество раскрытых здесь индуктивных узлов, причем соседние магниты связаны между собой, как описано в данном документе. Предполагается, что интерпретация приводимой далее формулы изобретения охватит собой все такие изменения, эквивалентные и альтернативные варианты исполнения во всех применимых случаях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ СОЕДИНЕНИЯ ОБСАДНЫХ ТРУБ | 2014 |
|
RU2655137C1 |
| БУРИЛЬНЫЙ СНАРЯД С УМЕНЬШЕННОЙ ТЕНДЕНЦИЕЙ ПРЕРЫВИСТОГО ПЕРЕМЕЩЕНИЯ | 1998 |
|
RU2197613C2 |
| ПРОГНОЗИРОВАНИЕ СВОЙСТВ ПОДЗЕМНОЙ ФОРМАЦИИ | 2008 |
|
RU2462755C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
| УМЕНЬШЕНИЕ ВОЗДЕЙСТВИЙ ПРИХВАТОВ-ПРОСКАЛЬЗЫВАНИЙ НА ИНСТРУМЕНТЫ ДЛЯ РОТОРНОГО НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2014 |
|
RU2663654C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЕРТИКАЛЬНЫХ СЕЙСМИЧЕСКИХ ПРОФИЛЕЙ В ХОДЕ БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2144684C1 |
| ВРАЩЕНИЕ И ОРИЕНТАЦИЯ МАГНИТНОГО ДАТЧИКА ОТНОСИТЕЛЬНО БУРОВОГО ИНСТРУМЕНТА | 2014 |
|
RU2661943C1 |
| СПОСОБ И СИСТЕМА ДЛЯ СЛУЖБЫ КОНТЕКСТА ДАННЫХ | 2008 |
|
RU2493590C2 |
| СЕЙСМОПРИЕМНИК С МАГНИТНОЙ СИСТЕМОЙ ГАШЕНИЯ СОБСТВЕННЫХ КОЛЕБАНИЙ | 2015 |
|
RU2658117C1 |
| БЛОКИРУЮЩИЙ СЕЙСМОГРАФ С ДВОЙНЫМ СЕРДЕЧНИКОМ | 2014 |
|
RU2667692C1 |
Приведенный в качестве иллюстрации геофон с настраиваемой резонансной частотой содержит первый индуктивный узел, включающий в себя катушку индуктивности с установленным в ней первым магнитом, причем первый магнит и первая катушка индуктивности выполнены с возможностью перемещения относительно друг друга, и второй индуктивный узел, включающий в себя вторую катушку индуктивности с установленным в ней вторым магнитом, причем второй магнит и вторая катушка индуктивности выполнены с возможностью перемещения относительно друг друга. Элемент связи соединяет выполненный с возможностью перемещения элемент первого индуктивного узла с выполненным с возможностью перемещения элементом второго индуктивного узла. В первом индуктивном узле используется регулируемое демпфирование для изменения резонансной частоты второго индуктивного узла. Технический результат – повышение точности получаемых данных. 3 н. и 17 з.п. ф-лы, 5 ил.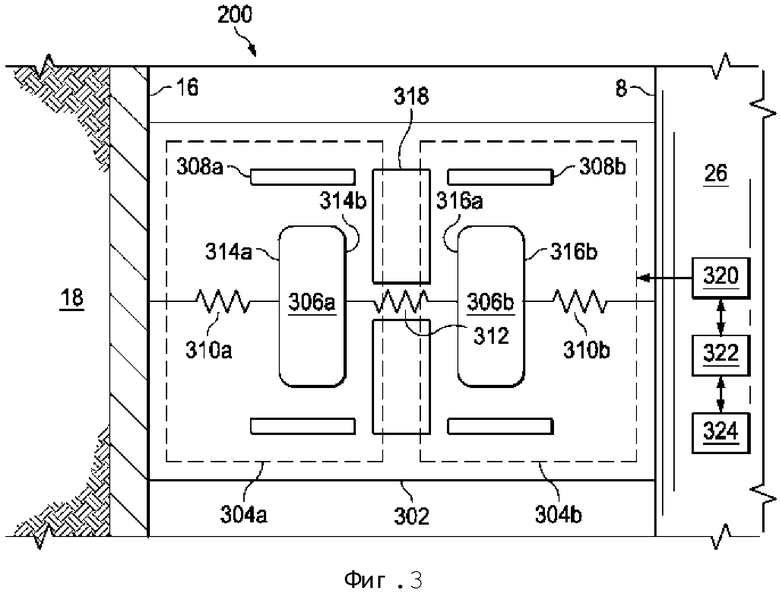
1. Геофон, содержащий:
первый индуктивный узел, включающий в себя первую катушку индуктивности с установленным в ней первым магнитом, причем первый магнит и первая катушка индуктивности выполнены с возможностью перемещения относительно друг друга;
второй индуктивный узел, включающий в себя вторую катушку индуктивности с установленным в ней вторым магнитом, причем второй магнит и вторая катушка индуктивности выполнены с возможностью перемещения относительно друг друга; и
элемент связи, связывающий выполненный с возможностью перемещения элемент первого индуктивного узла с выполненным с возможностью перемещения элементом второго индуктивного узла, причем в первом индуктивном узле используется регулируемое демпфирование для изменения резонансной частоты второго индуктивного узла.
2. Геофон по п. 1, в котором элементом связи является пружина.
3. Геофон по п. 1, дополнительно содержащий:
корпус для первого и второго индуктивных узлов, в котором выполненным с возможностью перемещения элементом первого индуктивного узла является первый магнит и выполненным с возможностью перемещения элементом второго индуктивного узла является второй магнит; и
пружину для каждого магнита, соединяющую магнит с корпусом.
4. Геофон по п. 1, дополнительно содержащий:
корпус для первого и второго индуктивных узлов, в котором выполненным с возможностью перемещения элементом первого индуктивного узла является первая катушка индуктивности и выполненным с возможностью перемещения элементом второго индуктивного узла является вторая катушка индуктивности; и
пружину для каждой катушки индуктивности, соединяющую катушку индуктивности с корпусом.
5. Геофон по п. 1, в котором каждый из магнитов соединен с корпусом геофона посредством пружины.
6. Геофон по п. 1, дополнительно содержащий магнитный экран, ослабляющий любую магнитную связь между первым и вторым индуктивными узлами.
7. Система сейсмических измерений во время бурения (SWD), содержащая:
бурильную колонну, содержащую:
контроллер; и
один или большее количество геофонов, причем каждый геофон включает в себя первый индуктивный узел, связанный со вторым индуктивным узлом для регулировки резонансной частоты второго индуктивного узла в соответствии с сигналом управления от контроллера.
8. Система по п. 7, в которой каждый геофон дополнительно содержит устройство управления демпфированием, замыкающее накоротко катушку индуктивности в первом индуктивном узле в ответ на сигнал управления.
9. Система по п. 7, в которой каждый геофон дополнительно содержит устройство управления демпфированием, активирующее ток в катушке индуктивности первого индуктивного узла в ответ на указанный сигнал управления.
10. Система по п. 7, в которой контроллер выполнен с возможностью получения результатов сейсмических измерений от второго индуктивного узла и с возможностью адаптации в режиме ответа уровня демпфирования первого индуктивного узла.
11. Система по п. 7, в которой контроллер выполнен с возможностью демпфирования обоих индуктивных узлов во время бурения.
12. Способ сейсмических измерений во время бурения, включающий в себя:
размещение одного или большего количества геофонов в стволе скважины, причем каждый геофон содержит первый и второй индуктивные узлы с выполненным с возможностью перемещения элементами, соединенными между собой пружиной;
ввод паузы в размещение одного или большего количества геофонов;
перевод каждого геофона в режим считывания, в котором второй индуктивный узел измеряет сейсмические сигналы, имея при этом резонансную частоту, которая целиком или частично подвержена влиянию первого индуктивного узла;
запоминание результатов измерения сейсмических сигналов; и
регулировку каждой указанной резонансной частоты.
13. Способ по п. 12, дополнительно включающий в себя пересылку собранных результатов измерений пользователю.
14. Способ по п. 12, дополнительно включающий в себя генерацию сигнала управления для каждого геофона для регулировки уровня демпфирования для первого индуктивного узла.
15. Способ по п. 12, в которой указанная регулировка включает в себя изменение уровня демпфирования первого индуктивного узла.
16. Способ по п. 15, в которой указанная регулировка дополнительно включает в себя анализ сохраненных сейсмических сигналов для определения подходящего уровня демпфирования.
17. Способ по п. 15, в котором указанная регулировка дополнительно включает в себя анализ измеренных сейсмических сигналов в реальном времени для определения и корректировки уровня демпфирования.
18. Способ по п. 12, дополнительно включающий в себя переключающие роли первого и второго индуктивных узлов такие, что второй индуктивный узел собирает результаты измерений, имея при этом резонансную частоту, на которую по меньшей мере частично влияет демпфирование второго индуктивного узла.
19. Способ по п. 12, дополнительно включающий в себя проверку работы каждого геофона путем приведения в действие первого индуктивного узла, чтобы вызвать перемещение выполненных с возможностью перемещения элементов, и измерения ответного сигнала второго индуктивного узла.
20. Способ по п. 12, дополнительно включающий в себя применение демпфирования к обоим индуктивным узлам каждого геофона во время транспортировки.
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| СЕЙСМОМЕТР | 2011 |
|
RU2477501C1 |
| Устройство для регистрации сейемических процессов | 1973 |
|
SU496519A1 |
| Электродинамический сейсмоприемник | 1978 |
|
SU813348A1 |
| US 4144520 A1, 13.03.1979 | |||
| US 4159464 A1, 26.06.1979. | |||

