УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в общем относится к операциям бурения скважин и, в частности, к обнаружению и локализации прилегающих обсадных труб во время бурения.
Углеводороды, такие как нефть и газ, как правило, добывают из подземных пластов, которые могут быть расположены на суше или в море. Выполнение подземных работ и способы, применяемые для извлечения углеводородов из подземного пласта, сложны. Обычно подземные работы предполагают выполнение ряда различных этапов, таких как, например, бурение ствола скважины в желаемом месте расположения скважины, обработку ствола скважины для оптимизации добычи углеводородов и осуществление необходимых этапов для добычи и переработки углеводородов из подземного пласта.
Во время бурения нефтеносных добывающих скважин может требоваться бурение ствола скважины с расположением и геометрией, зависящими от существующего ствола скважины. Например, во время бурения для гравитационного дренирования при закачке пара (SAGD), бурение добывающей скважины обычно осуществляется горизонтально через подземный пласт, а бурение паронагнетательной скважины затем осуществляется на заданном расстоянии над добывающей скважиной, например, в пяти метрах над добывающей скважиной. Затем пар нагнетается в паронагнетательную трубу для повышения температуры окружающего нефтеносного подземного пласта. При нагреве нефтеносного подземного пласта, вязкость окружающих углеводородов может уменьшиться и/или окружающие углеводороды могут стекать из подземного пласта в добывающую скважину. Эта добывающая система SAGD используется для добычи углеводородов, слишком вязких, чтобы добываться в качестве жидкости или газа в их природном состоянии. Например, нефтеносные смеси добываются из битуминозных песков (или "гудронных песков)" посредством SAGD системы.
Дополнительно, в некоторых внутрискважинных работах может требоваться, чтобы второй ствол скважины пересекался и/или соединялся с первым стволом скважины. Например, второй ствол скважины может использоваться для ослабления давления в первом стволе скважины, отвода флюидов из первого ствола скважины и/или взаимодействия другим образом с первым стволом скважины в случае, если доступ с поверхности не возможен. Для выполнения этого взаимодействия двух стволов скважин в подземном пласте, первая скважина обычно должна быть расположена в подземном пласте для выявления местоположения второй скважины.
Для бурильных работ, при которых местоположение производимых стволов скважин зависит от местоположения другого ствола скважины, буровому мастеру желательно обладать возможностью выявления расстояния и/или местоположения близлежащего ствола скважины и, в результате, производить настройки во время бурильных работ.
ЧЕРТЕЖИ
Некоторые конкретные, приведенные в качестве примера, варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные графические материалы.
Фиг. 1А является схематическим изображением, демонстрирующим выполнение каротажа при бурении среды, в соответствии с аспектами настоящего изобретения.
Фиг. 1Б является схематическим изображением, демонстрирующим среду проводного каротажа, в соответствии с аспектами настоящего изобретения.
Фиг. 2 является схематическим изображением примера паронагнетательной скважины, бурение которой производится для гравитационного дренирования при закачке пара, в соответствии с аспектами настоящего изобретения.
Фиг. 3 является схематическим изображением примера дальнометрического инструмента, приближенного к добывающей скважине, генерирующей магнитное поле, в соответствии с аспектами настоящего изобретения.
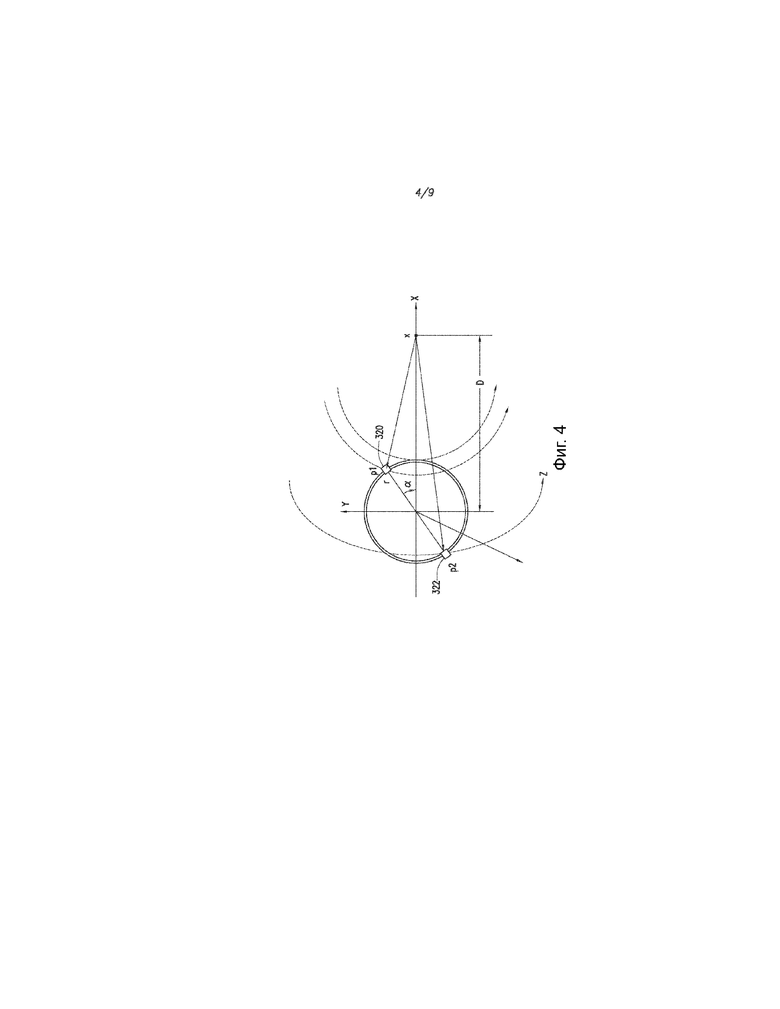
Фиг. 4 является схематическим изображением примера дальнометрического инструмента в не выровненном ориентировании относительно добывающей скважины в соответствии с аспектами настоящего изобретения.
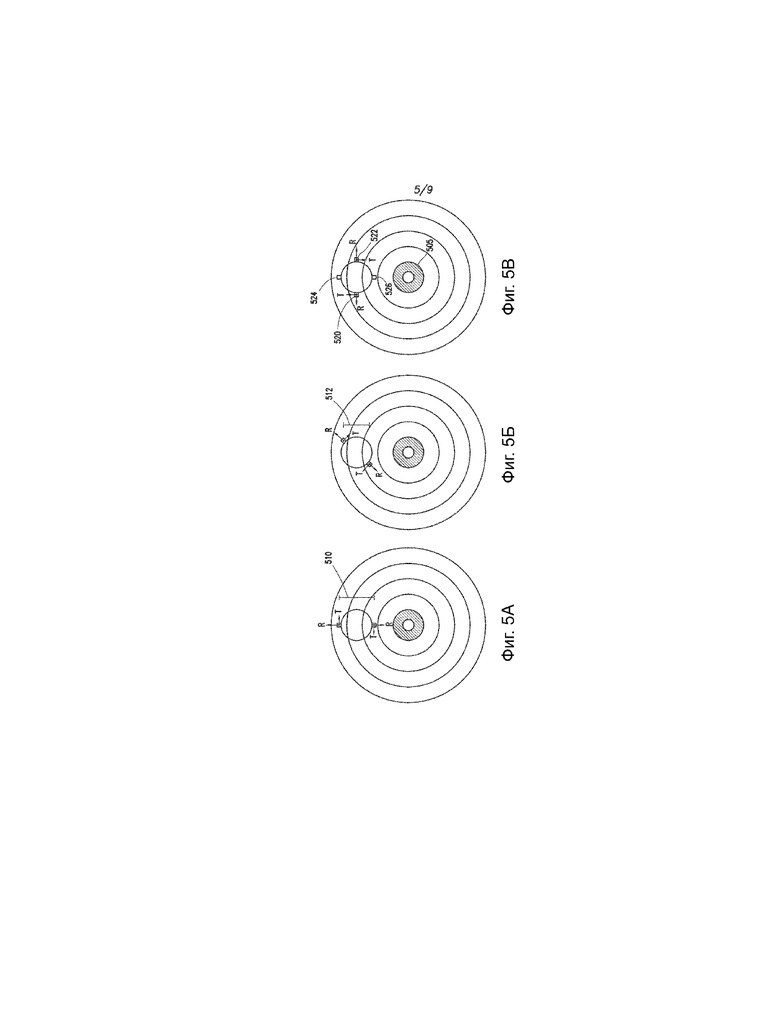
Фиг. 5А является схематическим изображением примера дальнометрического инструмента, приближенного к добывающей скважине, генерирующей магнитное поле в выровненном ориентировании, в соответствии с аспектами настоящего изобретения.
Фиг. 5Б является схематическим изображением примера дальнометрического инструмента, приближенного к добывающей скважине, генерирующей магнитное поле в не выровненном ориентировании, в соответствии с аспектами настоящего изобретения.
Фиг. 5В является схематическим изображением примера дальнометрического инструмента, приближенного к добывающей скважине, генерирующей магнитное поле в не выровненном ориентировании, причем магнитные датчики сориентированы в слепом ориентировании, в соответствии с аспектами настоящего изобретения.
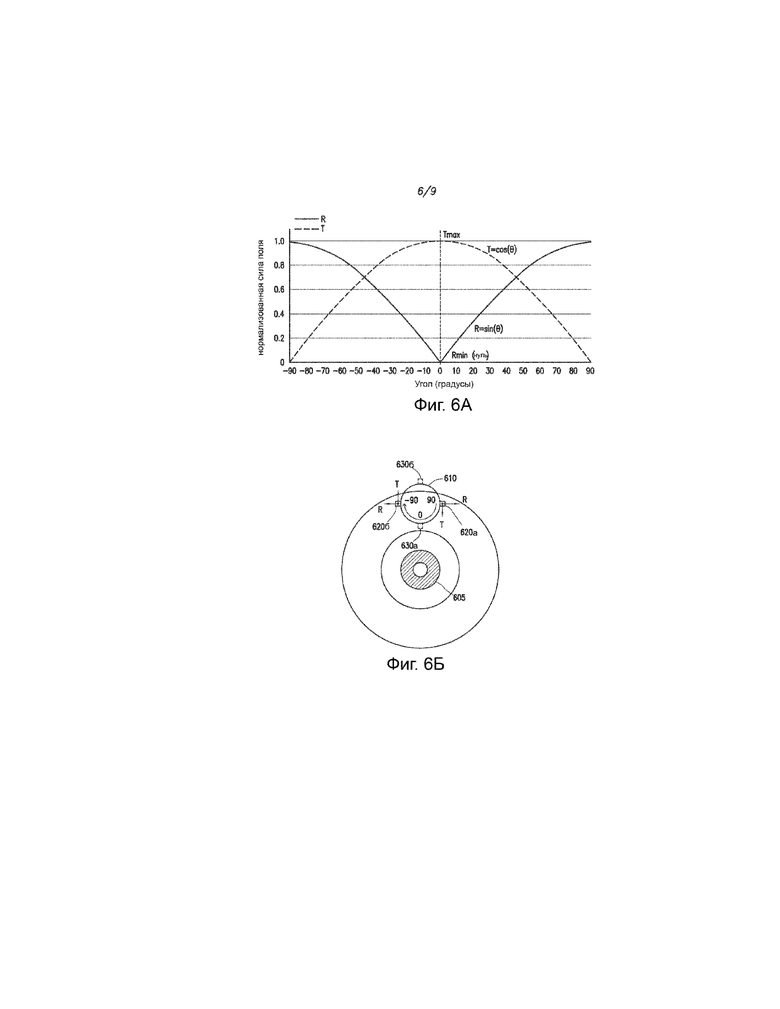
Фиг. 6А является графиком, иллюстрирующим силу поля измеренного магнитного поля в пределах ориентаций, в соответствии с аспектами настоящего изобретения.
Фиг. 6Б является схематическим изображением примера дальнометрического инструмента, демонстрирующего диапазон ориентаций магнитного датчика от -90 градусов до 90 градусов, представленных на Фиг. 6А, в соответствии с аспектами настоящего изобретения.
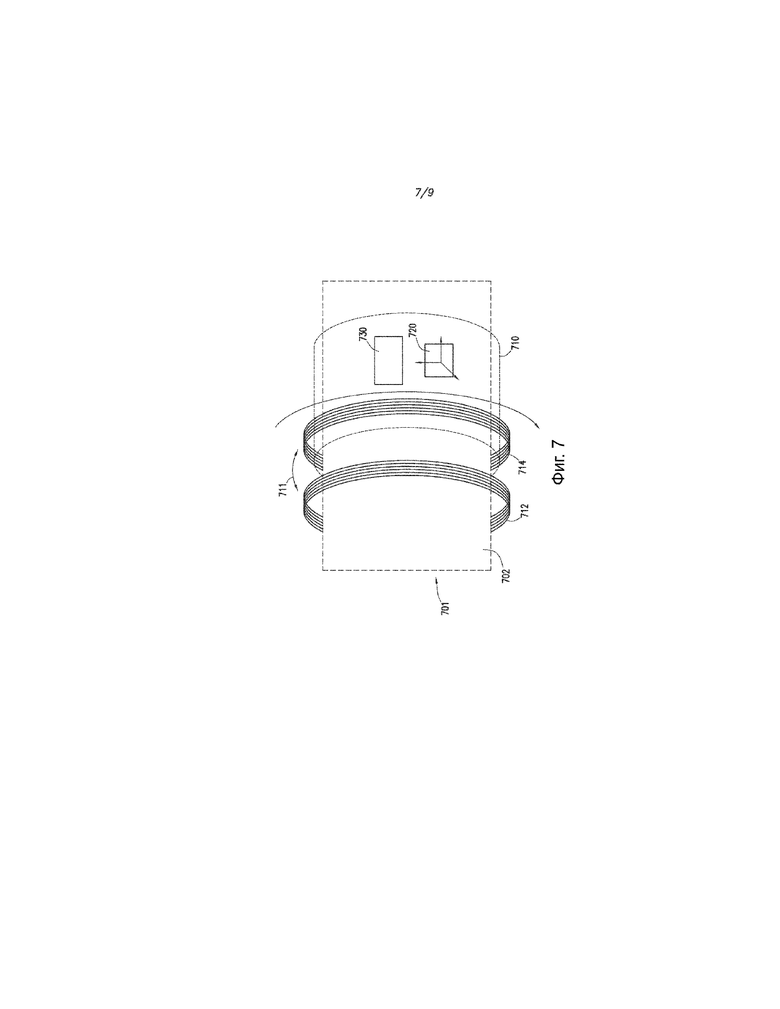
Фиг. 7 является диаграммой, иллюстрирующей пример дальнометрического инструмента, содержащий поворотный узел, в соответствии с аспектами настоящего изобретения.
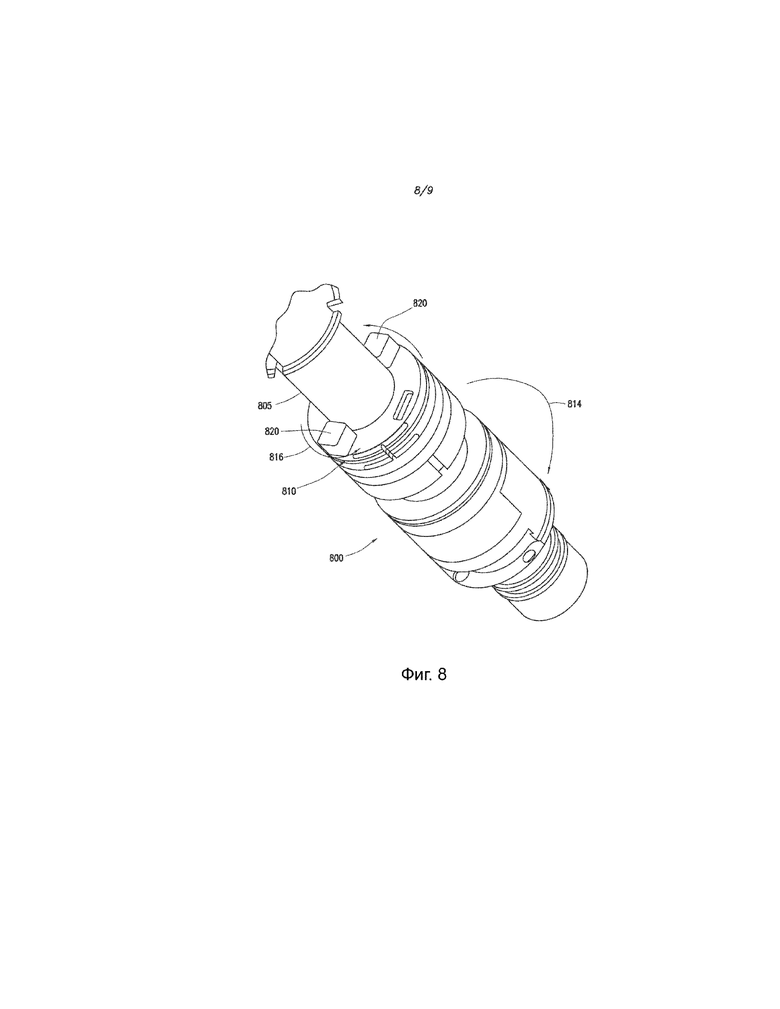
Фиг. 8 является диаграммой, иллюстрирующей пример дальнометрического инструмента, содержащий поворотный узел, в соответствии с аспектами настоящего изобретения.
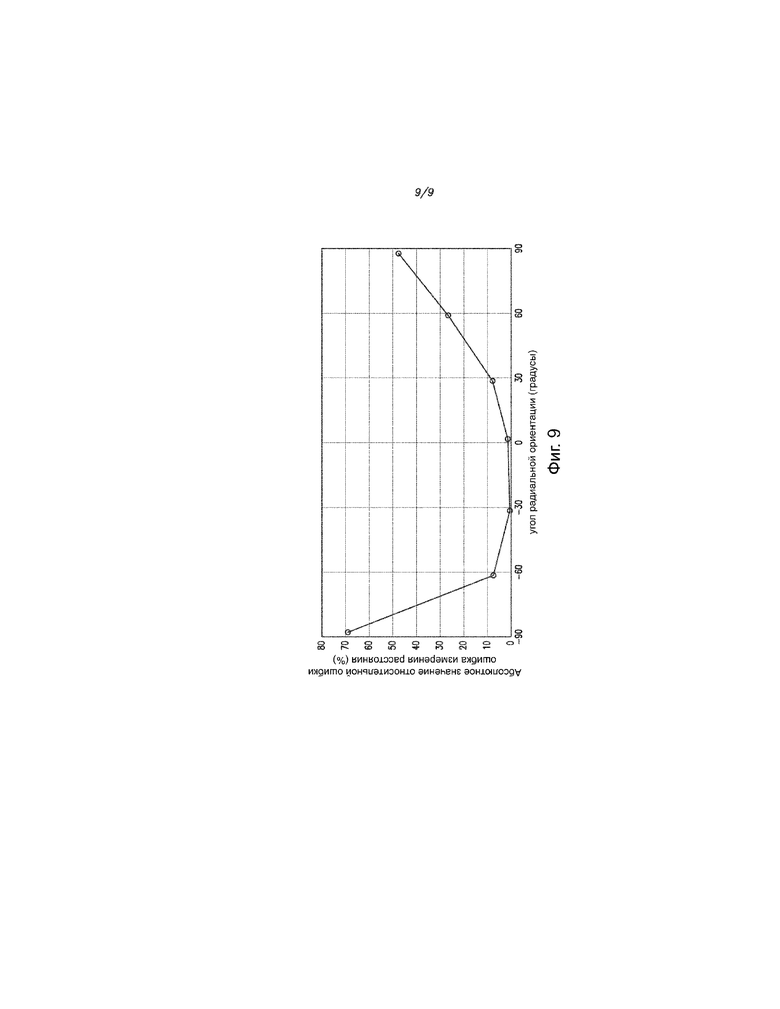
Фиг. 9 является графиком, иллюстрирующим абсолютное значение процента ошибки расстояния, измеренного приведенным в качестве примера дальнометрическим инструментом в качестве функции радиальной ориентации, в соответствии с аспектами настоящего изобретения.
Несмотря на то, что варианты реализации настоящего изобретения были изображены, описаны и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, которые ознакомятся с данным описанием. Изображенные и описанные варианты реализации настоящего изобретения являются только примерами и не ограничивают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В контексте данного описания система обработки информации может содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, классификации, анализа, передачи, приема, извлечения, создания, ветвления, хранения, отображения, выдачи, обнаружения, регистрации, воспроизведения, обработки или применения любой формы информации, сообщений или данных для целей бизнеса, науки, управления или других целей. Например, система обработки информации может представлять собой персональный компьютер, сетевое устройство хранения данных или любое другое подходящее устройство и может варьироваться по размеру, форме, производительности, функциональности и стоимости. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов для обработки информации, таких как центральный процессор (ЦП) или аппаратное либо программное логическое средство управления, ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы обработки информации могут содержать один или более дисководов, один или более сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (I/O), такие как клавиатура, мышь и видеодисплей. Система обработки информации может также содержать одну или более магистральных шин, выполненных с возможностью обеспечения обмена данными между различными аппаратными компонентами. Она может также содержать один или более модулей сопряжения, выполненных с возможностью передачи одного или более сигналов контроллеру, приводу или подобному устройству.
В контексте данного изобретения машиночитаемый носитель может включать любые устройства или совокупность устройств, способных хранить данные и/или команды в течение определенного периода времени. Машиночитаемый носитель может включать, например, без ограничения, запоминающий носитель, такой как запоминающее устройство с прямым доступом (например, жесткий диск или гибкий диск), запоминающее устройство с последовательным доступом (например, накопитель на магнитной ленте), компакт-диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и/или флэш-память; а также средства связи, такие как провода, оптические волокна, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или любую комбинацию из вышеуказанного.
В данном документе подробно описаны иллюстративные варианты реализации данного изобретения. Для ясности, в настоящем описании могут быть изложены не все особенности фактической реализации. Разумеется, следует иметь в виду, что при разработке любого такого фактического варианта реализации изобретения для достижения конкретных целей реализации предпринимаются многочисленные специфические для реализации решения, которые могут изменяться от одного варианта реализации изобретения к другому. Кроме того, следует иметь в виду, что такой процесс разработки может быть сложным и продолжительным, тем не менее, эта разработка будет рутинным мероприятием для специалистов в данной области техники, использующих преимущества ознакомления с данным описанием.
Для облегчения понимания настоящего изобретения приведены следующие примеры некоторых из вариантов реализации. Приведенные ниже примеры ни в коем случае не следует рассматривать как ограничивающие или определяющие объем настоящего изобретения. Варианты реализации настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземного пласта. Варианты реализации изобретения могут быть применимы к нагнетательным скважинам, а также добывающим скважинам, включая углеводородные скважины. Варианты реализации могут быть реализованы с использованием инструмента, подходящего для тестирования, извлечения и отбора проб вдоль секций пласта. Варианты реализации могут быть реализованы посредством инструментов, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием проводной линии связи, тросовой проволоки, колонны гибких труб, внутрискважинного робота и т. п. Термин "измерения во время бурения (ИВБ)" является общеиспользуемым при измерениях условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. Термин "каротаж во время бурения (КВБ)" является общеиспользуемым при подобных операциях, концентрирующихся больше на измерениях параметров пласта. Устройства и способы в соответствии с некоторыми вариантами реализации изобретения могут быть применены в одной или большем количестве проводных линий связи (включая проводную линию связи, тросовую проволоку, колонну гибких труб), скважинного робота и операций выполнения измерений во время бурения (ИВБ) и каротажа во время бурения (КВБ).
Термины «присоединяют» или «присоединяет», используемые в данном документе, предназначены для обозначения либо непрямого, либо прямого соединение. Таким образом, если первое устройство присоединяется ко второму устройству, это соединение может выполняться посредством прямого соединения или посредством непрямого механического или электрического присоединения через другие устройства и соединения. Аналогично, в данном документе принято, что термин "присоединен с возможностью связи" обозначает прямое либо непрямое присоединение с возможностью связи. Такое соединение может представлять собой проводное или беспроводное соединение, такое как, например, Ethernet или LAN. Такие проводные и беспроводные соединения хорошо известны специалистам в данной области техники и поэтому не будут подробно обсуждаться в данном документе. Таким образом, если первое устройство присоединено с возможностью связи ко второму устройству, такое соединение может быть осуществлено посредством прямого присоединения или непрямого присоединения через другие устройства и соединения.
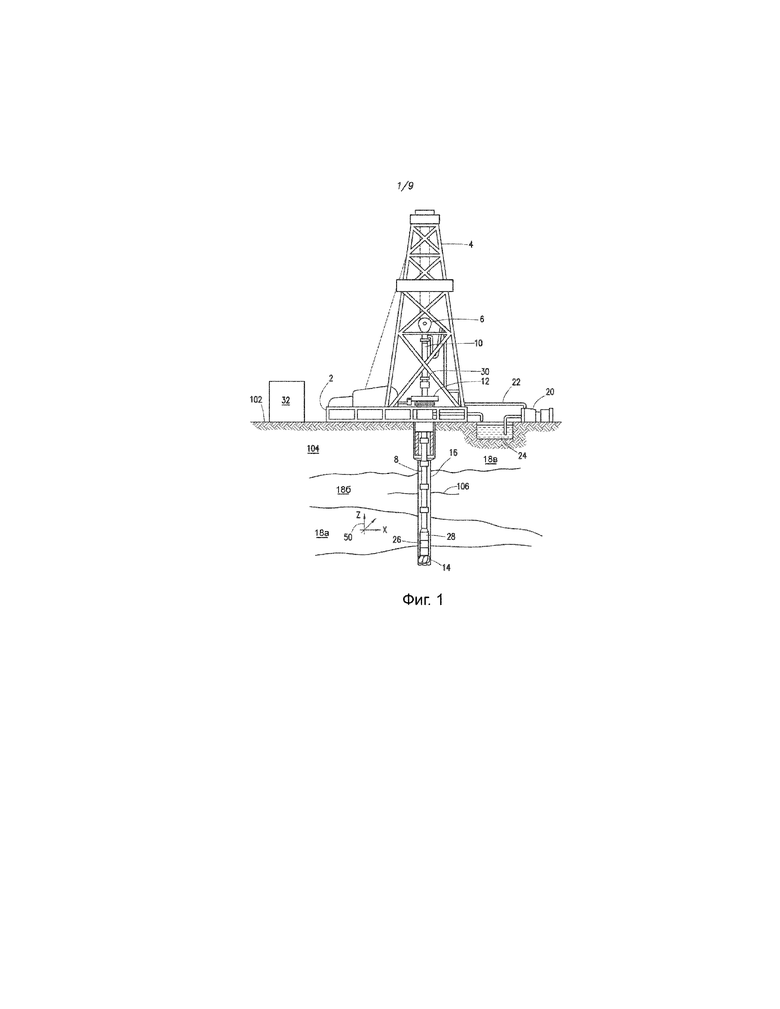
Фиг. 1А является схематическим изображением системы 100 бурения подземного пласта в соответствии с аспектами настоящего изобретения. Система бурения 100 содержит буровую платформу 2, расположенную на поверхности 102. В проиллюстрированном варианте реализации изобретения поверхность 102 включает верхнюю часть пласта 104, содержащую одну или более породных пластов или слоев 18а-в, и буровая платформа 2 может контактировать с поверхностью 102. В других вариантах реализации изобретения, таких как бурение прибрежного шельфа, поверхность 102 может быть отделена от буровой платформы 2 объемом воды.
Система бурения 100 содержит буровую вышку 4, поддерживаемую буровой платформой 2 и оборудованную талевым блоком 6 для подъема и опускания бурильной колонны 8. Ведущая бурильная труба 10 может поддерживать бурильную колонну 8 по мере ее опускания через поворотный стол 12. Буровое долото 14 может быть присоединено к бурильной колонне 8 и приводиться скважинным мотором и/или вращением бурильной колонны 8 поворотным столом 12. При вращении буровое долото 14 создает ствол 16 скважины, который проходит сквозь один или большее количество породных пластов или слоев 18. Насос 20 может прокачивать буровой раствор через питающую трубу 22 в ведущую бурильную трубу 10, далее вниз по трубе через внутреннюю часть бурильной колонны 8, через отверстия в буровом долоте 14, обратно на поверхность через затрубное пространство вокруг бурильной колонны 8 и в емкость для хранения бурового раствора 24. Буровой раствор переносит буровой шлам из ствола 16 скважины в емкость 24 и способствует сохранению целостности ствола 16 скважины.
Буровая система 100 может содержать компоновку низа бурильной колонны (КНБК), соединенную с бурильной колонной 8 вблизи бурового долота 14. КНБК может содержать различные внутрискважинные измерительные инструменты и датчики и элементы ИВБ и КВБ, включая дальнометрический инструмент 26. Дальнометрический инструмент 26 может содержать по меньшей мере один передатчик и приемник, способные присоединяться с возможностью связи к прилегающей и/или близкой инструментальной электронике, расположенной на бурильной колонне 8. По мере продвижения бура по скважине 16 через подземные пласты 18, дальнометрический инструмент 26 может проводить измерения силы магнитного поля, например, силы магнитного поля, генерируемого металлической конструкцией, расположенной в подземном пласте 104. В некоторых вариантах реализации изобретения ориентация и положение инструмента 26 может быть отслежено с использованием, например, индикатора азимутальной ориентации, который может содержать магнитометры, инклинометры и/или акселерометры, хотя и другие типы датчиков, такие как гироскопы могут использоваться в некоторых вариантах реализации изобретения. В вариантах реализации изобретения, содержащих индикатор азимутальной ориентации, дальнометрические измерения могут ассоциироваться с конкретной азимутальной ориентацией посредством азимутального разбиения значений случайной величины на интервалы, как будет описано далее.
В некоторых вариантах реализации изобретения дальнометрический инструмент 26 может также содержать модуль управления (не показан), присоединенный к передатчикам и приемникам, который управляет их работой, хранит данные измерений и, в некоторых случаях, обрабатывает данные измерений магнитного поля для определения расстояния от объекта, генерирующего магнитное поле, и на основании данных датчика/индикатора азимутальной ориентации может выявлять направление объекта, генерирующего магнитное поле. Примеры модулей управления могут содержать микроконтроллеры и микрокомпьютеры и любое другое устройство, содержащее по меньшей мере один процессор присоединенный с возможностью связи к запоминающим устройствам, содержащим набор команд, которые при выполнении процессором, побуждают его к выполнению определенных действий. В некоторых вариантах реализации изобретения, модуль управления дальнометрического инструмента 26 может быть присоединен с возможностью связи к другим контроллерам внутри КНБК.
КНБК также может содержать отклоняющий инструмент 34, управляющий направлением бурового долота 14 и, таким образом, направлением, в котором будет осуществляться бурение буровой скважины 16. Примеры отклоняющего инструмента содержат системы типа направления бурового долота и толкания бурового долота. Одним из примеров применения отклоняющего инструмента 34 является направление бурового долота 14 и буровой скважины 16 к одному из формируемых пластов 18аа-в, содержащего углеводороды. Другие применения включают избежание некоторых нежелательных слоев или масс подземных пластов, следуя существующей скважине, поддерживая расстояние от прилегающей скважины, или пересекая существующую скважину для бурения разгрузочных скважин в случае выброса. В некоторых вариантах реализации изобретений, отклоняющий инструмент 34 может содержать отдельный модуль управления (не показан), управляющий работой отклоняющего инструмента 34. Модуль управления может быть присоединен с возможностью связи к другим контроллерам в КНБК, таким как модуль управления в инструменте резистивного каротажа 26, и может изменять свою работу в зависимости от результатов измерений или сигналов, полученных от других контроллеров.
Инструменты и датчики КНБК, содержащие дальнометрический инструмент 26, могут быть присоединены с возможностью связи к телеметрическому элементу 28. Телеметрический элемент 28 может передавать результаты измерений от дальнометрического инструмента 26 к приемнику 30 на поверхности и/или принимать команды от приемника 30 на поверхности. Телеметрический элемент 28 может содержать систему гидроимпульсной телеметрии, акустическую телеметрическую систему, проводную систему связи, беспроводную систему связи или любой другой тип системы связи, который мог бы быть признан специалистом в данной области техники, принимая во внимание настоящее изобретение. В некоторых вариантах реализации изобретения некоторые или все измерения, выполняемые дальнометрическим инструментом 26, могут также сохраняться в инструменте 26 или телеметрическом элементе 28 для дальнейшего восстановления на поверхности 102.
В некоторых вариантах реализации изобретения система 100 бурения может содержать систему 32 обработки информации, расположенную на поверхности 102. Система 32 обработки информации может быть присоединена с возможностью связи к приемнику 30 на поверхности и может принимать результаты измерений от дальнометрического инструмента 26 и/или передавать команды дальнометрическому инструменту 26 через приемник 30 на поверхности. Система 32 обработки информации может также принимать результаты измерений от дальнометрического инструмента 26, когда инструмент 26 поднят на поверхность 102. Как будет описано далее, система 32 обработки информации может обрабатывать данные измерений магнитного поля и/или азимутального ориентирования для определения расстояния от объекта, генерирующего магнитное поле, и/или направления объекта, генерирующего магнитное поле.
В различные моменты во время процесса бурения бурильная колонна 8 может быть извлечена из буровой скважины 16, как показано на Фиг. 1Б. После извлечения бурильной колонны 8 операции измерения/каротажа могут проводиться, используя спускаемый на тросе инструмент 34, т. е. инструмент, который подвешен в скважине 16 посредством кабеля 15, имеющего проводники для передачи мощности к инструменту и системе телеметрии от корпуса инструмента на поверхность 102. Спускаемый на тросе инструмент 34 может содержать дальнометрический инструмент 36, имеющий по меньшей мере одну пару магнитных датчиков, предназначенных и выполненных с возможностью измерения магнитного поля и/или градиента магнитного поля, генерируемого металлическим объектом, подобно тем, описанным выше, относительно дальнометрического инструмента 26. Дальнометрический инструмент 36 может быть присоединен с возможностью связи к кабелю 15. Дальнометрическое оборудование 44 (показанное на Фиг. 1Б как грузовик, хотя может быть любой другой конструкцией) может получать результаты измерений от дальнометрического инструмента 36, и может включать вычислительное оборудование (в том числе, например, модуль управления) для управления, обработки, хранения и/или визуализации измерений, полученных посредством дальнометрического инструмента 36. Вычислительное оборудование может быть присоединено с возможностью связи к дальнометрическому инструменту 36 посредством кабеля 15. В некоторых вариантах реализации изобретения поверхностный модуль управления 32 может служить вычислительным оборудованием каротажного оборудования 44.
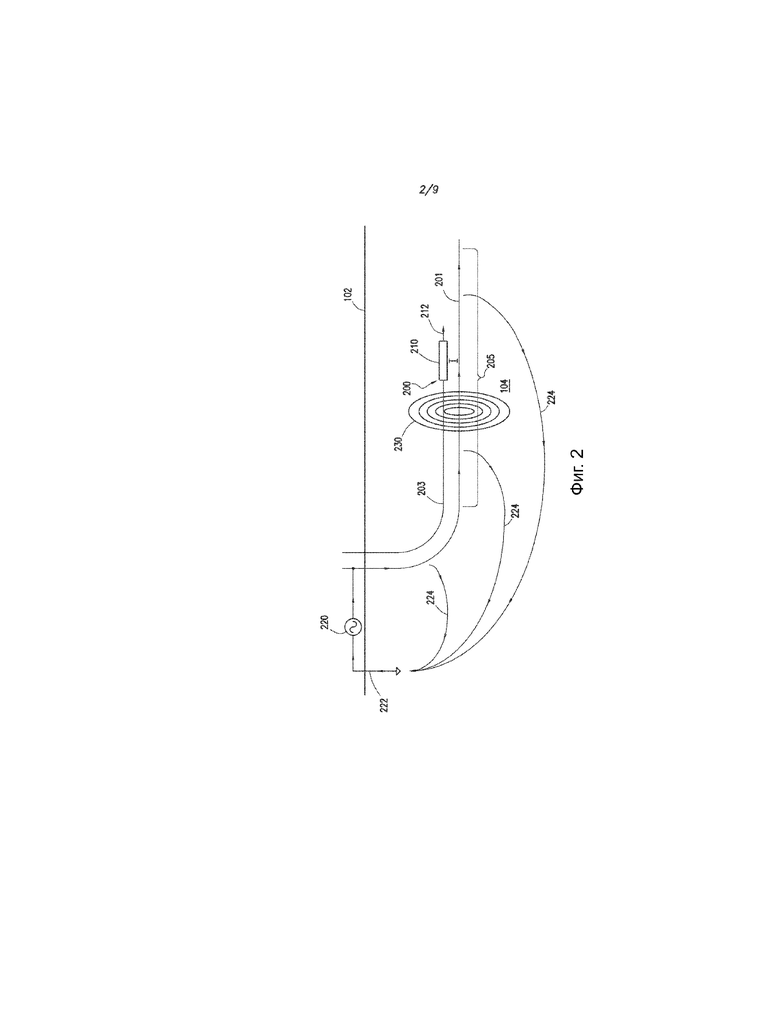
Фиг. 2 демонстрирует схематическое изображение добывающей скважины 201 и бурильной колонны 200 в процессе бурения прилегающей скважины 203, например, паронагнетательной скважины. В некоторых вариантах реализации изобретения углеводороды могут вытекать в добывающую скважину 201 для сбора и/или добычи из подземного пласта 104. В некоторых вариантах реализации изобретения прилегающая скважина 203 может быть нагнетательной скважиной, используемой для стимулирования потока углеводородов в добывающую скважину 201. Бурильная колонна 200 может содержать дальнометрический инструмент 210 и буровое долото 212. В некоторых вариантах реализации изобретения добывающая скважина 201 и прилегающая скважина 203 могут содержать систему гравитационного дренирования при закачке пара (SAGD). Добывающая скважина 201 может содержать добывающий участок 205, пролегающий сквозь подземный пласт 104 в продольном направлении практически параллельно поверхности 102. В некоторых вариантах реализации изобретения желательно осуществлять бурение прилегающей скважины 203 практически параллельно и точно над добывающим участком 205 добывающей скважины 201 так, чтобы расстояние между прилегающей скважиной 203 и добывающим участком 205 оставалось практически неизменным. Например, в некоторых вариантах реализации изобретения, прилегающая скважина 203 и добывающий участок 205 могут располагаться на расстоянии от 3 до 10 м. Например, прилегающая скважина 203 может располагаться в 5 метрах (± 1 метр) от добывающего участка 205. То есть, местоположение прилегающей скважины 203 может зависеть от положения добывающей скважины 201 в подземном пласте.
В некоторых вариантах реализации изобретения добывающая скважина 201 может содержать обсадную трубу. Обсадная труба может возбуждаться электрическим током. В некоторых вариантах реализации изобретения для генерирования электрического тока может использоваться усилитель мощности 220. В некоторых вариантах реализации изобретения электрический ток может иметь низкую частоту, например, менее 100 Гц. Например, электрический ток может иметь частоту менее 10 Гц. Электрический ток может протекать вниз по обсадной трубе в добывающей скважине 201 и через подземный пласт 104 по меньшей мере к одному электроду заземления 222. Электрод заземления 222 может быть расположен так, чтобы утечка электрического тока 224 направлялась от буровой системы 200 и/или прилегающей скважины 203 так, чтобы утечка электрического тока 224 минимально взаимодействовала с дальнометрическим инструментом 210 буровой системы 200. Например, как проиллюстрировано на Фиг. 2, электрод заземления 222 может быть размещен в противоположной стороне от направления, в котором пролегает добывающий участок 205. В некоторых вариантах реализации изобретения электрод заземления 222 может быть расположен на удалении от 0,5 км до 4 км от добывающей скважины 201. Например, электрод заземления может располагаться на удалении 1 км от добывающей скважины 201.
В некоторых вариантах реализации изобретения, обсадная труба может возбуждаться для установления местоположения добывающей скважины. Однако, в соответствии с настоящим изобретением, другие проводящие материалы могут использоваться для проведения электрического тока через длину добывающей скважины 201.
Электрический ток, протекающий через обсадную трубу или проводящий материал, может создавать упомянутое магнитное поле 230. Дальнометрический инструмент 210 может измерять силу градиента магнитного поля в радиальном направлении для определения расстояния от добывающей скважины, как это будет дополнительно описано далее. В некоторых вариантах реализации изобретения, дальнометрический инструмент 210 может также использовать данные измерений силы поля (R, T, и Z), составляющие в соответствии с данными азимутального ориентирования для выявления направления добывающей скважины.
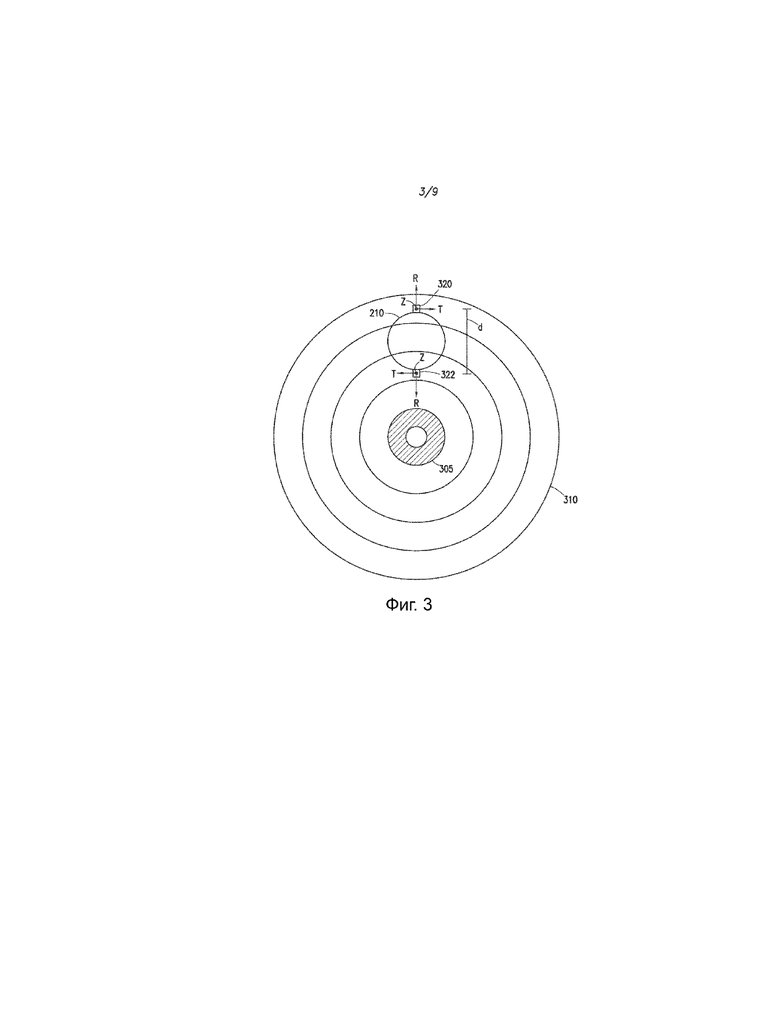
На Фиг. 3 проиллюстрировано поперечное сечение обсадной трубы 305 в добывающей скважине, создающей магнитное поле 310. Магнитное поле 310 может распространяться радиально от обсадной трубы 305 и ослабляться в качестве функции расстояния от обсадной трубы 305. Дальнометрический инструмент 210 может располагаться в магнитном поле 310.
В некоторых вариантах реализации изобретения дальнометрический инструмент 210 может содержать первый магнитный датчик 320 и второй магнитный датчик 322, расположенные на дальнометрическом инструменте 210 по существу друг напротив друга (то есть, по существу 180 градусов друг от друга). Магнитные датчики, по существу противоположные друг другу, упоминаются здесь как "пара магнитных датчиков". Магнитные датчики 320, 322 могут обнаруживать по меньшей мере две перпендикулярные составляющие направления магнитного поля 310 (радиальную (R) составляющую и тангенциальную (T) составляющую). В некоторых вариантах реализации изобретения магнитные датчики 320, 322 могут обнаруживать Z составляющую магнитного поля 310. В некоторых вариантах реализации изобретения магнитные датчики 320, 322 могут быть сориентированы так, чтобы Z составляющая пролегала в продольном направлении бурильной трубы (ортогонально относительно изображения, показанного на Фиг. 3), причем соответствующие Z составляющие указывали в том же направлении. В некоторых вариантах реализации изобретения соответствующие R составляющие пары магнитных датчиков могут указывать от центра бурильной трубы, в существенно противоположных направлениях, и T составляющие могут быть тангенциальны относительно дальнометрического инструмента 210.
При расположении в магнитном поле 310, генерируемом добывающей скважиной 305, первый магнитный датчик 320 может измерять силу первого магнитного поля, а второй магнитный датчик 322 может измерять силу второго магнитного поля. Градиент магнитного поля может определяться от силы магнитного поля, измеряемой первым и вторым магнитными датчиками 320, 322, как показано в уравнении 1:
 (1)
(1)
где градиент (H) является измеренным градиентом магнитного поля, H1, H2 является силой магнитного поля, измеряемой соответствующими магнитными датчиками 320, 322, а d является расстоянием между датчиками, измеренным в радиальном направлении.
Магнитные датчики 320, 322 сориентированы на Фиг. 3 так, чтобы быть выровненными в радиальном направлении относительно добывающей скважины. В данном документе принято, что термин "выровнен" будет использоваться для обозначения радиального выравнивания относительно добывающей скважины, как показано на Фиг. 3. В указанной ориентации градиент магнитного поля полностью измеряется в тангенциальных составляющих (T) магнитными датчиками 320, 322. Таким образом, в данном ориентировании, только T составляющие необходимы для расчета каротажного расстояния. Дополнительно, в этом ориентировании может достигаться максимум отношения сигнал-шум (SNR), поскольку магнитные датчики находятся на максимальном радиальном расстоянии d друг от друга и радиальные составляющие (R) близки или эквивалентны нулю, что упрощает расчеты, необходимые для определения каротажного расстояния. Когда магнитные датчики выровнены с добывающей скважиной, азимутальная ориентация инструментов/датчиков может быть существенна для выявления направления добывающей скважины без необходимости определения угла между датчиками и добывающей скважиной, используя составляющие силы поля. В некоторых вариантах реализации изобретения, использование ориентирования инструмента для выявления направления может уменьшить ошибку, входящей в измерения направления с использованием датчиков магнитного поля.
Расчет каротажных измерений представлен уравнением 2 для случая, когда магнитные датчики существенно не выровнены, как показано на Фиг. 4. Если два датчика 320, 322 имеют угол α относительно оси X (если добывающая скважина 305 по оси X), то расстояние D от добывающей скважины 305 представлено уравнением 2:
 (2)
(2)
(2)
где B1 является абсолютным значением общего магнитного поля, измеренного первым магнитным датчиком 320, B2 является абсолютным значением общего магнитного поля, измеренного вторым магнитным датчиком 322, а r является радиусом дальнометрического инструмента. Когда α=0 (в случае, если магнитные датчики выровнены), уравнение 2 может быть упрощено следующим образом:
 (3)
(3)
Дополнительно, вихревые токи, генерируемые на металлическом корпусе/конструкции инструмента в результате воздействия магнитного поля добывающей скважины могут быть источником ошибки каротажных измерений. Принимая во внимание воздействие вихревых токов при α=0, уравнение 3 может быть записано следующим образом:
 (4)
(4)
где b1 является абсолютным значением тангенциального магнитного поля, генерируемого вихревыми токами на первом магнитном датчике 320, а b2 является абсолютным значением тангенциального магнитного поля, генерируемого вихревыми токами на втором магнитном датчике 322. Поскольку r является очень малым по сравнению с расстоянием D, разница между b1 и b2 может быть принята близкой к 0. Таким же образом, значения b1 и b2 являются очень малыми по сравнению с B1 и B2. Поэтому, даже принимая во внимание воздействие вихревых токов при α=0, ошибка каротажного расстояния в соответствии с уравнением 4 может оставаться очень малой и легко рассчитываемой количественно в виду выравнивания магнитных датчиков.
В некоторых вариантах реализации изобретения дальнометрический инструмент неподвижен во время проведения градиентных измерений. Для осуществления неподвижности буровой мастер должен останавливать бурение и/или останавливать вращение бурильной колонны для каждого каротажного измерения. В некоторых вариантах реализации изобретения буровой мастер может не обладать возможностью контроля того, как сориентирована бурильная колонна, когда она окончательно останавливается. В результате, дальнометрический инструмент, установленный на бурильной колонне, может иметь неконтролируемое выравнивание относительно добывающей скважины и обычно не бывает существенно выровненным. Как было описано выше, могут потребоваться более сложные расчеты, которые по существу имеют более низкое отношение сигнал/шум и разрешение.
На Фиг. 5A-5В показан диапазон ориентаций дальнометрического инструмента относительно добывающей скважины. Фиг. 5А демонстрирует идеальное выравнивание с расстоянием градиента 510 в максимуме. Фиг. 5 Б демонстрирует скошенное выравнивание с расстоянием градиента 512 меньшим, чем расстояние градиента при идеальном выравнивании. Дополнительно, как показано на Фиг. 5В, дальнометрический инструмент может остановится в "слепой" ориентации относительно добывающей скважины 505, в которой оба магнитных датчика 520, 522 находятся на одинаковом радиальном удалении от добывающей скважины и, таким образом, наблюдают одинаковую силу магнитного поля, в которой измерения градиента магнитного поля могут быть близки к нулю. В этом случае дальнометрический инструмент может содержат вторую пару магнитных датчиков 524, 526, расположенную ортогонально относительно первой пары магнитных датчиков 520, 522. В некоторых вариантах реализации изобретения дальнометрический инструмент может выбирать пару магнитных датчиков, которая предоставляет лучшие результаты градиентных измерений и, таким образом, наиболее близких к идеально выровненному. В некоторых вариантах реализации изобретения дальнометрический инструмент может использовать пару магнитных датчиков с наиболее обширным градиентом измерений для получения предварительных данных измерений расстояния и другую пару магнитных датчиков для получения вторичных данных расстояния. Вторичные измерения расстояния могут использоваться как дополнительная верификация первичных измерений расстояния.
В некоторых вариантах реализации изобретения буровой мастер может медленно вращать бурильную колонну в попытке установить пару магнитных датчиков в выровненное положение с добывающей скважиной. Постоянная телеметрическая связь между дальнометрическим инструментом и поверхностью может позволить дальнометрическому инструменту осуществлять связь, когда T составляющие максимальны и/или R составляющие минимальны, что может указывать на то, что пара магнитных датчиков выровнена. Дальнометрический инструмент может содержать передатчик. В некоторых вариантах реализации изобретения передатчик может быть электромагнитным передатчиком или гидроимпульсным телеметрическим передатчиком. Например, электромагнитный передатчик может использоваться для беспроводной передачи данных пока дальнометрический инструмент не осуществляет измерений магнитного поля или градиента магнитного поля, и/или электромагнитный передатчик может передавать частоту, которая не оказывает влияния на магнитное поле, измеренное парой магнитных датчиков.
Фиг. 6А демонстрирует график силы магнитного поля для R и T составляющих в противоположность с ориентированием пары магнитных датчиков с добывающей скважиной, в соответствии с диапазоном ориентаций пары магнитных датчиков, показанном на Фиг. 6Б. Фиг. 6Б демонстрирует пример дальнометрического инструмента 610, содержащего пару магнитных датчиков, содержащую первый магнитный датчик 620а и второй магнитный датчик 620б в ориентациях -90, 0, и +90 градусов. Показанные сначала в ориентации -90 градусов, магнитные датчики 620а и 620б могут быть равноудалены от возбужденной металлической конструкции 605, причем первый магнитный датчик 620а может быть справа от дальнометрического инструмента 610 и второй магнитный датчик 620б может быть слева от дальнометрического инструмента 610. Эта ориентация может упоминаться как слепая ориентация, как было описано выше, поскольку градиент магнитного поля, измеренный парой магнитных датчиков, может предоставлять мало или не предоставлять дальномерную информацию о металлической конструкции 605. При вращении дальнометрического инструмента по часовой стрелке на 90 градусов, первый магнитный датчик 620а может располагаться в близком к выровненному положению 630а наиболее близком к металлической конструкции, а второй магнитный датчик 630б может располагаться в дальнем выровненном положении 630б удаленном от металлической конструкции. Это положение может упоминаться как выровненное положение или идеальное положение и представлено как ориентация 0 градусов по Фиг. 6A. (Хотя дальнометрический инструмент показан в данном примере как вращающийся по часовой стрелке, он может вращаться как по часовой стрелке, так и против часовой стрелки.) Вращение дальнометрического инструмента на дополнительные 90 градусов по часовой стрелке устанавливает пару магнитных датчиков в ориентацию +90 градусов, в которой первый магнитный датчик 620а располагается в положении изначально занимаемом вторым магнитным датчиком 620б, и наоборот.
Обращаясь к Фиг. 6А, T составляющая может располагаться в максимуме, если пара магнитных датчиков выровнена с добывающей скважиной, показанной при 0 градусов. В этой точке идеального выравнивания R составляющая может иметь резкое 0-вое значение силы поля, в то время, как сила поля, измеренная T составляющей, может иметь плавный пик максимума. В некоторых вариантах реализации изобретения мастер буровик может вращать бурильную колонну и/или дальнометрический инструмент, пока измерения R составляющей не покажут минимум силы поля для выравнивания дальнометрического инструмента. В некоторых вариантах реализации изобретения мастер буровик может вращать бурильную колонну и/или дальнометрический инструмент, пока измерения Т составляющей не покажут максимум силы поля для выравнивания дальнометрического инструмента. Выравнивание дальнометрического инструмента для каждого измерения в ручном режиме может быть затратно по времени и затруднено ввиду возможной сложности в управлении бурильной колонной.
Как показано на Фиг. 7, в некоторых вариантах реализации изобретения, дальнометрический инструмент 701 может содержать поворотный узел 710, вращаемый вокруг корпуса дальнометрического инструмента 702. Пара магнитных датчиков может быть установлена на поворотном узле 710 (первый магнитный датчик 720 виден на Фиг. 7). В некоторых вариантах реализации изобретения датчик азимутальной ориентации (не показан) может устанавливаться на поворотном узле. Поворотный узел 710 может содержать двигатель для активирования вращения пары магнитных датчиков вокруг дальнометрического инструмента 701. В некоторых вариантах реализации изобретения двигатель может быть электрическим двигателем. Двигатель может вращать поворотный узел медленно или поэтапно для минимизации генерирования частот, которые могут влиять на магнитное поле. Дополнительно, двигатель может размещаться удаленно от магнитного датчика для минимизации влияния на магнитное поле. В некоторых вариантах реализации изобретения дальнометрический инструмент 701 может содержать электронный модуль 730, присоединенный к магнитным датчикам и/или датчику азимутальной ориентации. Электронный модуль может содержать батарею и обеспечивать питанием магнитные датчики и/или датчик азимутальной ориентации. В некоторых вариантах реализации изобретения дальнометрический инструмент 701 может содержать угольные щетки, токосъемники и/или любые другие формы вращательного электрического соединения, предназначенные и выполненные с возможностью обеспечения питания магнитных датчиков и /или датчика азимутальной ориентации. В некоторых вариантах реализации изобретения электронный модуль 730 может содержать беспроводный интерфейс, который может передавать данные датчиков к сопряженной электронной аппаратуре инструмента. Беспроводный передатчик может получать цифровой сигнал от сопряженной электронной аппаратуры инструмента, причем цифровой сигнал может содержат команды управления с поверхности.
В некоторых вариантах реализации изобретения дальнометрический инструмент 701 может содержать индуктивное трансформаторное соединение 711 между первой катушкой 712, смонтированной на корпусе 702 дальнометрического инструмента, и второй катушкой 714. Индуктивное трансформаторное соединение 711 может быть присоединено к электронному модулю, паре магнитных датчиков и/или датчику азимутальной ориентации. Индуктивное трансформаторное соединение 711 может быть предназначено и выполнено с возможностью генерирования беспроводного питания, пока первая катушка 712 и вторая катушка 714 вращаются относительно друг друга, используя способ беспроводной передачи энергии (БПЭ). Например, первая катушка 712 может быть смонтирована на корпусе 702 дальнометрического инструмента, а вторая катушка 714 может быть смонтирована на поворотном узле 710. Индуктивное трансформаторное соединение 711 может быть выполнено с возможностью генерирования переменного тока питания, а преобразователь питания может преобразовывать переменный ток питания в постоянный ток питания. В некоторых вариантах реализации изобретения мягкие ферромагнитные материалы (не показано) могут увеличивать эффективность соединения индуктивного соединения и/или изолировать магнитные поля, излучаемые из индуктивного трансформаторного соединения 711.
В некоторых вариантах реализации изобретения электронный модуль 730 может содержать контроллер, присоединенный к паре магнитных датчиков и двигателю. Для проведения измерений расстояния, контроллер может принимать данные измерений магнитного поля от пары датчиков и определять, равна ли R составляющая пары магнитных датчиков нулевому минимуму, как описано выше со ссылкой на Фиг. 6. Контроллер может давать команду двигателю вращать поворотный узел, побуждая пару магнитных датчиков к вращению, пока R составляющая не окажется в минимуме и/или T составляющая окажется в максимуме. Например, контроллер может вращать поворотный узел так, чтобы R составляющая находилась в 10% от величины минимума, и/или так, чтобы T составляющая находилась в 5% от величины минимума. Например, в некоторых вариантах реализации изобретения, контроллер может вращать поворотный узел так, чтобы пара магнитных датчиков находилась в 15 градусах от идеального выравнивания с добывающей скважиной; например, если магнитный датчик находится в 5 градусах от идеального выравнивания. В некоторых вариантах реализации изобретения контроллер может автоматически выравнивать дальнометрический инструмент относительно добывающей скважины без участия мастера буровика.
В случае, если контроллер определяет, что R составляющие находятся в минимуме, и, следовательно, что магнитные датчики выровнены, контроллер может считывать данные измерений магнитного поля, выполненные парой магнитных датчиков, и/или данных азимутальной ориентации, измеренные датчиком азимутальной ориентации. В некоторых вариантах реализации изобретения контроллер может вычислять расстояние и направление считывания данных на инструменте и посылать значение вычисленного расстояния на поверхность. В некоторых вариантах реализации изобретения контроллер может посылать данные измерений магнитного поля на поверхность, где процессор может вычислять данные направления и расстояния до добывающей скважины. После получения данных направления и расстояния до добывающей скважины на поверхности, они могут быть продемонстрированы мастеру буровику на компьютере. Мастер буровик может использовать направление и расстояние до добывающей скважины для внесения поправок в направление бурения или поддержания курса, если дальнометрический инструмент находится на желаемом расстоянии от и над добывающей скважиной.
На Фиг. 8 продемонстрирован пример дальнометрического инструмента 800, содержащий поворотный узел 810, содержащий пару магнитных датчиков 820 и/или датчик азимутальной ориентации (не показано). Поворотный узел 810 может быть смонтирован на бурильной колонне 805 и может быть предназначен и выполнен с возможностью вращения вокруг бурильной колонны 805. Например, при заданном вращении бурильной колонны по часовой стрелке (показанное стрелкой 814), поворотный узел может вращаться в противоположном направлении против часовой стрелки (показано стрелкой 816). В некоторых вариантах реализации изобретения поворотный узел может вращаться главным образом эквивалентно и противоположно вращению бурильной колонны для удержания пары датчиков неподвижными и/или в выровненной ориентации, например, поддерживая дальнометрический инструмент выровненным в 15 градусах с добывающей скважиной. В некоторых вариантах реализации изобретения поворотный узел 810 может содержать по меньшей мере один датчик вращения (не показано), закрепленный на поворотном узле 810. Например, в некоторых вариантах реализации изобретения по меньшей мере один датчик вращения может быть магнитометром. По меньшей мере один датчик вращения может обнаруживать вращение бурильной колонны 805 и отправлять сигнал управления поворотному узлу 810 в ответ. Например, по меньшей мере один датчик вращения может отправлять сигнал управления, указывающий поворотному узлу 810 повернуться в направлении, противоположном обнаруженному вращению бурильной колонны 805.
В некоторых вариантах реализации изобретения поворотный узел 810 может содержать по меньшей мере один акселерометр (не показан), закрепленный на поворотном узле 810. По меньшей мере один акселерометр может быть предназначен и выполнен с возможностью обнаружения вибрации бурильной колонны 805 и/или поворотного узла 810. В ответ на обнаруженную вибрацию по меньшей мере один акселерометр может отправлять сигнал управления, указывающий поворотному узлу 810 осуществлять вибрации в противоположность бурильной колонне 805. Таким образом, по меньшей мере один датчик вращения и/или по меньшей мере один акселерометр может поддерживать пару магнитных датчиков 820 в установленном радиальном и/или аксиальном выровненном положении, соответственно.
В некоторых вариантах реализации изобретения поворотный узел 810 может быть смонтирован на виброгасителе (не показан). Виброгаситель может ослаблять вибрации от бурильной колонны на магнитные датчики, уменьшая шум, вносимый в магнитные датчики во время бурения. В некоторых вариантах реализации изобретения поворотный узел может быть установлен на системе активного управления вибрациями (АУВ). Система АУВ может содержат двигатель и процессор, присоединенный к двигателю. Процессор может получать информацию по движению от акселерометра, размещенного на бурильной колонне и приводить двигатель для вибрирования системы АУВ и поворотного узла в противоположность вибрации бурильной колонны для поддержания поворотного узла в стабильном положении. В некоторых вариантах реализации изобретения двигатель может быть предназначен и выполнен с возможностью вибрирования дальнометрическим инструментом противоположно вибрациям бурильной колонны, обнаруженным по меньшей мере одним акселерометром. Например, по меньшей мере один акселерометр может передавать сигнал двигателю вибрировать противоположно и/или инверсно вибрациям бурильной колонны. Таким образом, двигатель может стабилизировать дальнометрический инструмент в ответ на вибрацию бурильной колонны.
В некоторых вариантах реализации изобретения контроллер может быть присоединен и может быть настроен на получение сигналов о движении бурильной колонны от по меньшей мере одного магнитометра и/или по меньшей мере одного акселерометра; контроллер может также быть присоединен к паре магнитных датчиков и настроен на получение сигналов выравнивания от пары магнитных датчиков. Таким образом, в некоторых вариантах реализации изобретения контроллер может быть выполнен с возможностью получения данных R составляющей и/или T составляющей для выравнивания пары магнитных датчиков с добывающей скважиной и данных вращения и/или вибраций для поддержания выравнивания.
В некоторых вариантах реализации изобретения двигатель может вращать поворотный узел во время бурения при вращении бурильной колонны. В некоторых вариантах реализации изобретения двигатель может вращать поворотный узел противоположно вращению бурильной колонны с такой же скоростью или оборотами в минуту, что и бурильная колонна, для поддержания узла магнитного датчика главным образом выровненным относительно добывающей скважины. Таким образом, дальнометрический инструмент может использоваться для измерения градиента магнитного поля для получения данных каротажа во время бурения.
На Фиг. 9 представлен график абсолютного значения процента относительной ошибки расстояния, измеренного приведенным в качестве примера дальнометрическим инструментом в виде зависимости радиальной ориентации (градусы) пары магнитных датчиков. Ориентация пары магнитных датчиков изменяется в диапазоне от -90 градусов до 90 градусов, как показано на Фиг. 6A и 6Б. При угле ориентации в 0 градусов, пара магнитных датчиков, можно сказать, является аксиально выровненной относительно добывающей скважины. При 0 градусов пара магнитных датчиков может измерять магнитное поле и/или градиент магнитного поля для получения данных измерений расстояния с минимальной ошибкой. При движении пары магнитных датчиков от ориентации в 0 градусов по направлению к ориентации 90 градусов или -90 градусов, относительная ошибка измерения расстояния увеличивается до примерно 70%, как показано в примере. В некоторых вариантах реализации изобретения измерение магнитного поля может уменьшить ошибку рассчитанного расстояния от добывающей скважины в то время, как пара магнитных датчиков существенно выровнена относительно добывающей скважины.
В некоторых вариантах реализации изобретения способ местоположения металлической конструкции в подземном пласте может включать бурение скважины в подземном пласте с использованием бура, присоединенного к бурильной колонне, содержащей дальнометрический инструмент, содержащий пару магнитных датчиков; возбуждение металлической конструкции электрическим током; выравнивание пары магнитных датчиков с металлической конструкцией; измерение по меньшей мере одного из: магнитного поля и градиента магнитного поля, генерируемого металлической конструкцией посредством пары магнитных датчиков; определение расстояния от дальнометрического инструмента до металлической конструкции; регулировка параметров бурения в ответ на расстояние от дальнометрического инструмента до металлической конструкции.
В некоторых вариантах реализации изобретения способ бурения скважины в подземном пласте может включать бурение скважины в подземном пласте используя бур, смонтированный на бурильной колонне, содержащей дальнометрический инструмент; возбуждение металлической конструкции электрическим током; выравнивание пары магнитных датчиков с металлической конструкцией; измерение посредством дальнометрического инструмента по меньшей мере одного из: магнитного поля и градиента магнитного поля, генерируемого металлической конструкцией во время вращения бурильной колонны; определение расстояния от дальнометрического инструмента до металлической конструкции; измерение азимутальной ориентации дальнометрического инструмента/пары магнитных датчиков посредством датчика азимутальной ориентации; выявление направления металлической конструкции относительно дальнометрического инструмента; настройка параметров бурения в соответствии с расстоянием и направлением металлической конструкции относительно дальнометрического инструмента.
Настоящее изобретение делает возможным обнаружение металлической конструкции в подземном пласте, через который осуществляется бурение скважины. Информация о расстоянии и местоположении может позволять буровому мастеру осуществлять бурение скважины главным образом поддерживая удаление относительно металлической конструкции или может позволять буровому мастеру осуществлять бурение в металлической конструкции. Таким образом, каротажная информация, предоставляемая посредством настоящего изобретения, может использоваться для более точного и эффективного бурения скважины в случае важности ее местоположения. В настоящем изобретении в иллюстративных целях представлена металлическая конструкция, являющаяся добывающей скважиной, однако, металлическая конструкция может быть любой конструкцией, возбуждаемой электрическим током и генерирующей магнитное поле в ответ на возбуждение таким электрическим током.
Следовательно, настоящее изобретение хорошо приспособлено для достижения описанных и свойственных результатов и преимуществ. Частные варианты реализации, описанные ранее, являются иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием. Кроме того, описанные в контексте настоящего изобретения подробности конструкции или дизайна не предполагают ограничения, за исключением описанных ниже в формуле изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены или модифицированы, и все такие изменения находятся в пределах объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов.
Изобретение относится к бурению сближенных скважин, в частности к средствам определения расположения обсадной колонны соседней скважины. Техническим результатом является расширение арсенала технических средств. В частности, предложена измерительная система, содержащая бурильную колонну и дальнометрический инструмент, смонтированный на бурильной колонне. При этом дальнометрический инструмент содержит пару магнитных датчиков, содержащую первый магнитный датчик и второй магнитный датчик, смонтированные радиально друг напротив друга на дальнометрическом инструменте. Причем каждый из магнитных датчиков предназначен и выполнен с возможностью обнаружения по меньшей мере радиальной составляющей и тангенциальной составляющей магнитного поля. Кроме того, система содержит поворотный узел, содержащий двигатель, предназначенный и выполненный с возможностью активирования вращения пары магнитных датчиков вокруг бурильной колонны; и электронный модуль, присоединенный к паре магнитных датчиков и/или двигателю. Причем электронный модуль содержит контроллер и беспроводное телеметрическое устройство. 3 н. и 17 з.п. ф-лы, 12 ил.
1. Измерительная система, содержащая:
бурильную колонну; и
дальнометрический инструмент, установленный на бурильной колонне, содержащий:
пару магнитных датчиков, содержащую первый магнитный датчик и второй магнитный датчик, установленные радиально друг напротив друга на дальнометрическом инструменте, причем каждый из магнитных датчиков предназначен и выполнен с возможностью обнаружения по меньшей мере радиальной составляющей и тангенциальной составляющей магнитного поля;
поворотный узел, содержащий двигатель, предназначенный и выполненный с возможностью активирования вращения пары магнитных датчиков вокруг бурильной колонны; и
электронный модуль, присоединенный по меньшей мере к одному из: паре магнитных датчиков и двигателю, причем электронный модуль содержит контроллер и беспроводное телеметрическое устройство.
2. Система по п. 1, дополнительно содержащая вторую пару магнитных датчиков, содержащую магнитный датчик А и магнитный датчик Б, установленные радиально друг напротив друга на дальнометрическом инструменте.
3. Система по п. 2, отличающаяся тем, что вторая пара магнитных датчиков ортогональна указанной паре магнитных датчиков.
4. Система по п. 1, дополнительно содержащая датчик азимутальной ориентации, смонтированный на поворотном узле, предназначенный и выполненный с возможностью выявления азимутальной ориентации дальнометрического инструмента.
5. Система по п. 1, дополнительно содержащая первую катушку индуктивности, смонтированную на корпусе дальнометрического инструмента, и вторую катушку индуктивности, смонтированную на поворотном узле, причем первая и вторая катушки индуктивности предназначены и выполнены с возможностью создания индуктивного трансформаторного соединения.
6. Система по п. 1, дополнительно содержащая по меньшей мере один датчик вращения, установленный на поворотном узле, при этом по меньшей мере один указанный датчик вращения предназначен и выполнен с возможностью выявления вращения бурильной колонны и/или дальнометрического инструмента, причем по меньшей мере один указанный датчик вращения электронно присоединен к контроллеру.
7. Система по п. 1, дополнительно содержащая по меньшей мере один акселерометр, установленный на поворотном узле, при этом по меньшей мере один акселерометр предназначен и выполнен с возможностью обнаружения вибрации бурильной колонны и/или дальнометрического инструмента, причем по меньшей мере один указанный акселерометр электронно присоединен к контроллеру.
8. Система по п. 1, отличающаяся тем, что беспроводное телеметрическое устройство представляет собой электромагнитное телеметрическое устройство и/или устройство гидроимпульсной телеметрии.
9. Способ локализации металлической конструкции внутри пласта, включающий этапы, на которых:
осуществляют бурение ствола скважины в пласте, используя бурильную колонну, содержащую дальнометрический инструмент, содержащий пару магнитных датчиков;
возбуждают металлическую конструкцию электрическим током;
выравнивают пару магнитных датчиков относительно металлической конструкции;
измеряют по меньшей мере одно из: магнитное поле и градиент магнитного поля, генерируемый металлической конструкцией, посредством пары магнитных датчиков;
определяют расстояние от дальнометрического инструмента до металлической конструкции; и
настраивают параметры бурения в соответствии с расстоянием и направлением металлической конструкции относительно дальнометрического инструмента.
Способ по п. 9, отличающийся тем, что выравнивание пары магнитных датчиков относительно металлической конструкции включает вращение пары магнитных датчиков посредством поворотного узла.
11. Способ по п. 9, дополнительно включающий измерение азимутальной ориентации дальнометрического инструмента/пары магнитных датчиков посредством азимутального датчика и выявление направления металлической конструкции относительно дальнометрического инструмента.
12. Способ по п. 9, отличающийся тем, что измерение по меньшей мере одного из: магнитного поля и градиента магнитного поля генерируемого металлической конструкцией посредством пары магнитных датчиков дополнительно включает вращение бурильной колонны во время измерений.
13. Способ по п. 9, отличающийся тем, что выравнивание пары магнитных датчиков относительно металлической конструкции включает обнаружение по меньшей мере одного из: радиальной составляющей и тангенциальной составляющей посредством пары магнитных датчиков и вращения пары магнитных датчиков до момента достижения минимума радиальной составляющей или максимума тангенциальной составляющей.
14. Способ по п. 9, отличающийся тем, что измерение магнитного поля, генерируемого металлической конструкцией посредством пары магнитных датчиков, дополнительно включает удержание бурильной колонны неподвижной во время измерений.
15. Способ по п. 9, дополнительно включающий обнаружение вращения бурильной колонны посредством по меньшей мере одного датчика вращения и вращения пары магнитных датчиков в направлении, противоположном вращению бурильной колонны.
16. Способ по п. 9, дополнительно включающий обнаружение вибрации бурильной колонны посредством по меньшей мере одного акселерометра и вибраций пары магнитных датчиков в направлении, противоположном обнаруженной вибрации.
17. Способ по п. 9, дополнительно включающий подачу питания паре магнитных датчиков посредством индуктивного трансформаторного соединения между первой катушкой, смонтированной на корпусе дальнометрического инструмента, и второй катушкой, смонтированной на поворотном узле.
18. Способ локализации металлической конструкции внутри пласта, включающий этапы, на которых:
осуществляют эксплуатацию спускаемого на тросе инструмента в ствол скважины, проходящий сквозь пласт, причем спускаемый на тросе инструмент содержит дальнометрический инструмент;
возбуждают металлическую конструкцию электрическим током;
выравнивают относительно металлической конструкции пару магнитных датчиков, смонтированных на дальнометрическом инструменте;
осуществляют измерение посредством пары магнитных датчиков по меньшей мере одного из: магнитного поля и градиента магнитного поля, генерируемого металлической конструкцией по мере продвижения спускаемого на тросе инструмента внутри ствола скважины; и
определяют расстояние от металлической конструкции до дальнометрического инструмента.
19. Способ по п. 18, отличающийся тем, что выравнивание пары магнитных датчиков относительно металлической конструкцией включает обнаружение по меньшей мере одного из: радиальной составляющей и тангенциальной составляющей посредством пары магнитных датчиков и вращения пары магнитных датчиков до момента достижения минимума радиальной составляющей или максимума тангенциальной составляющей.
20. Способ по п. 18, дополнительно включающий измерение азимутальной ориентации дальнометрического инструмента посредством азимутального датчика и выявление направления металлической конструкции от дальнометрического инструмента.
| WO 2014089490 A1, 12.06.2014 | |||
| ОПРЕДЕЛЕНИЕ ГЕОМЕТРИИ СТВОЛОВ СКВАЖИН ВНУТРИ ОБСАЖЕННЫХ СКВАЖИН С ПОМОЩЬЮ МЕЖСКВАЖИННЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗМЕРЕНИЙ | 2004 |
|
RU2342527C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ТОЧНОГО НАПРАВЛЕНИЯ БУРЕНИЯ ДВОЙНЫХ СКВАЖИН | 2005 |
|
RU2386810C2 |
| US 7962287 B2, 14.06.2011 | |||
| WO 2010059263 A1, 27.05.2010 | |||
| US 20110298462 A1, 08.12.2011. | |||

