УРОВЕНЬ ТЕХНИКИ
[0001] В связи с тем, что углеводородные пласты становятся более труднодоступными, операции бурения скважин становятся все более сложными как по вертикали, так и по горизонтали, и возрастает потребность в точном определении местонахождения бурового снаряда в требуемых подземных пластах. Это требует точного управления направлением бурения бурового снаряда с возможностью уклонения от определенных пластов либо вскрытия целевых пластов. Управление буровым снарядом включает изменение направления торца бурового долота, присоединенного к концу бурового снаряда.
[0002] Инструменты для роторного наклонно-направленного бурения, традиционно применяемые в операциях направленного бурения, могут содержать отклоняющий шпиндель или другой узел, который может быть присоединен к вращающемуся корпусу. Можно управлять вращением отклоняющего шпинделя отдельно от вращения корпуса или же поддерживать отклоняющий шпиндель в геостационарном положении по отношению к пластам, пробиваемым буровым долотом. В некоторых системах, осуществляющих роторное бурение, буровое долото может быть функционально связано с отклоняющим шпинделем посредством вала долота. Можно управлять вращением отклоняющего шпинделя и, следовательно, ориентацией вала долота и бурового долота, независимо от вращения бурильной колонны и бурового долота. Адаптивное управление вращением отклоняющего шпинделя может сократить общее время бурения, обеспечивая бурение ствола скважины в соответствии с желаемым планом скважины.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0003] Нижеследующие фигуры включены для иллюстрации некоторых аспектов настоящего изобретения и их не следует рассматривать как ограничивающие варианты реализации изобретения. В отношении раскрываемого объекта изобретения может быть предложено множество модификаций, изменений, комбинаций и эквивалентов по форме и функционированию без отступления от объема настоящего раскрытия изобретения.
[0004] На Фиг. 1 проиллюстрировано схематическое изображение типовой системы бурения, в которой могут быть реализованы один или более принципов настоящего раскрытия изобретения.
[0005] На Фиг. 2A-2C проиллюстрированы схематические изображения узла управления направлением бурения по Фиг. 1.
[0006] На Фиг. 3 проиллюстрирован изометрический вид планетарного редуктора по Фиг. 2C.
[0007] На Фиг. 4 проиллюстрирован детальный вид в поперечном разрезе планетарного редуктора по Фиг. 2C и турбины по Фиг. 2B.
[0008] На Фиг. 5 проиллюстрирован график, на котором смоделировано воздействие жесткой механической связи по сравнению с более гибкой механической связью с учетом прихвата-проскальзывания.
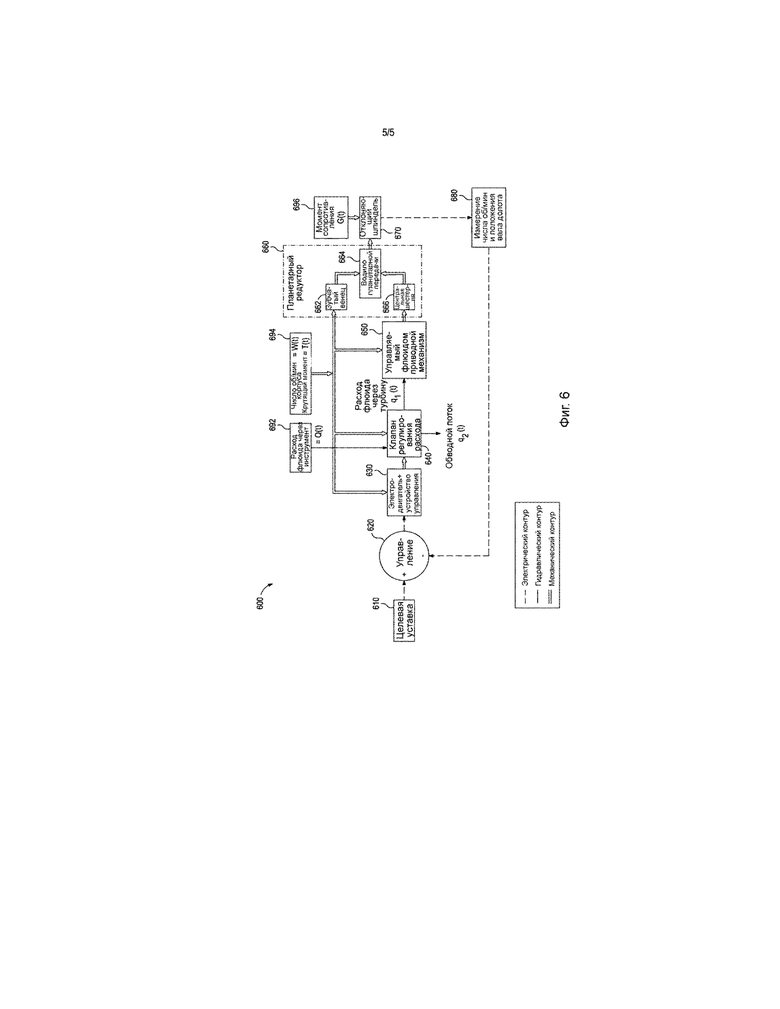
[0009] На Фиг. 6 проиллюстрирована блок-схема системы управления по замкнутому контуру.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0010] Настоящее изобретение в целом относится к операциям бурения скважин и, в частности, к уменьшению воздействий прихвата-проскальзывания, испытываемых при полном вращении инструментов для роторного наклонно-направленного бурения.
[0011] В описанных в настоящем документе вариантах реализации изобретения предлагается узел управления направлением бурения, который уменьшает неблагоприятные воздействия возмущений от прихвата-проскальзывания, возникающих в процессе операций по бурению. В целом, прихват-проскальзывание - это явление бурильной колонны, которое происходит в случае, если требуемый крутящий момент при бурении вызывает накопление крутильной энергии в бурильной колонне. Крутильная энергия преодолевает сопротивление, которое приводит к быстрому высвобождению энергии в виде ускорения бурильной колонны. Это явление может стать периодическим и, следовательно, приводить к формированию устойчивых неблагоприятных условий бурения. В настоящем раскрытии изобретения предлагается механическое соединение, которое может содержаться в узле управления направлением бурения, помогающее уменьшать неблагоприятные воздействия возмущения от прихвата-проскальзывания, и, следовательно, улучшающее режим работы датчика и бурильной установки при направленном бурении.
[0012] Типовые узлы управления направлением бурения, описанные в данном документе, содержат корпус, имеющий установленную в нем турбину, предназначенную для вращения приводного вала. Планетарный редуктор установлен в корпусе и содержит зубчатый венец, функционально связанный с корпусом, центральную шестерню, соединенную с приводным валом, и водило планетарной передачи. Механическое соединение функционально связывает зубчатый венец с корпусом таким образом, что вращение корпуса вращает зубчатый венец. Механическое соединение можно выбрать, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом. За счет уменьшения возмущения от прихвата-проскальзывания, передающегося между корпусом и зубчатым венцом, направленное бурение может быть улучшено посредством усовершенствования управления торцом бурового режущего инструмента, обеспечиваемого системой управления. Кроме того, мощность, используемая системой управления для уменьшения возмущения от прихвата-проскальзывания, может быть уменьшена при заданной амплитуде и/или частоте прихвата-проскальзывания, что позволяет использовать генератор меньшей мощности.
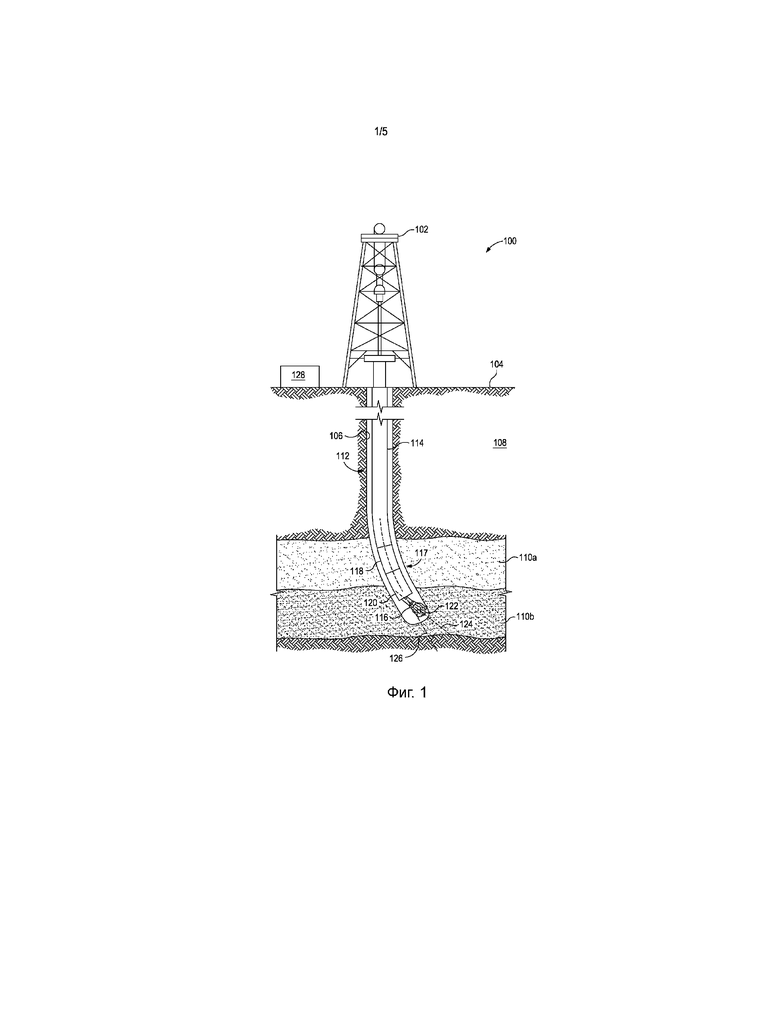
[0013] На Фиг. 1 проиллюстрировано схематическое изображение типовой системы бурения 100, в которой могут быть реализованы принципы настоящего раскрытия изобретения, в соответствии с одним и более вариантами реализации изобретения. Как проиллюстрировано, система бурения 100 может содержать буровую установку 102, установленную на поверхности 104 и расположенную над скважиной 106, пролегающей внутрь земной поверхности 108, включая подземные пласты 110a и 110b. Буровой снаряд 112 может пролегать внутрь скважины 106 от буровой установки 102. Буровой снаряд 112 может содержать бурильную колонну 114, которая может содержать множество соединенных резьбой трубчатых сегментов, а к концу бурильной колонны 114 может быть присоединено буровое долото 116. Компоновка низа бурильной колонны (КНБК) 117 может быть расположена в бурильной колонне 114 и может содержать, например, устройство 118 для выполнения скважинных измерений во время бурения (ИВБ) и узел 120 управления направлением бурения.
[0014] Узел 120 управления направлением бурения может быть выполнен с возможностью управлять направлением выбуривания скважины 106. Будет очевидно, что скважина 106 в целом будет выбуриваться в направлении, перпендикулярном к торцу 122 бурового долота 116, которое соответствует продольной оси 124 бурового долота 116. Соответственно, управление направлением скважины 106 может предполагать регулирование угла между продольной осью 124 бурового долота 116 и продольной осью 126 узла 120 управления направлением бурения и, следовательно, регулирование угловой ориентации бурового долота 116 по отношению к выбуриваемым подземным пластам 110a,b.
[0015] Как более подробно описано ниже, узел 120 управления направлением бурения может содержать отклоняющий шпиндель (не показан), который осуществляет отклонение продольной оси 124 бурового долота 116 от продольной оси 126 узла 120 управления направлением бурения. Отклоняющий шпиндель могут поворачивать в направлении, обратном по отношению к направлению вращения бурильной колонны 114, для поддержания угловой ориентации бурового долота 116 по отношению к выбуриваемым подземным пластам 110a,b. Узел 120 управления направлением бурения может принимать управляющие сигналы от управляющего устройства 128, расположенного на поверхности 104. Хотя управляющее устройство 128 проиллюстрировано на Фиг. 1 расположенным на поверхности 104, в альтернативном варианте управляющее устройство 128 может быть расположено в скважине (например, в КНБК 117) или в удаленном местоположении, без отступления от объема настоящего раскрытия изобретения. Управляющее устройство 128 может содержать систему обработки информации и машиночитаемый носитель и может быть выполнено с возможностью осуществлять связь с узлом 120 управления направлением бурения через телеметрическую систему.
[0016] В некоторых вариантах реализации изобретения, как будет описано ниже, управляющее устройство 128 может передавать управляющие сигналы на узел 120 управления направлением бурения для изменения направления продольной оси 124 бурового долота 116, а также для управления обратным вращением отклоняющего шпинделя для поддержания угловой ориентации бурового долота 116 по отношению к выбуриваемым подземным пластам 110a,b. Используемая в данном документе фраза «поддержание угловой ориентации бурового долота 116 по отношению к подземным пластам 110a,b» может упоминаться в контексте настоящего изобретения как «поддержание бурового долота 116 в «геостационарном» положении». В некоторых вариантах реализации изобретения система обработки информации и машиночитаемый носитель могут содержаться в или же быть связанными с узлом 120 управления направлением бурения для выполнения некоторых или всех функций управления. Кроме того, другие компоненты КНБК 117, включая устройство 118 ИВБ, могут осуществлять связь и принимать команды от управляющего устройства 128.
[0017] При типовой работе бурильную колонну 114 могут вращать для выполнения бурения скважины 106. Вращение бурильной колонны 114 может приводить к вращению КНБК 117 и бурового долота 116 в том же направлением и, как правило, с той же частотой вращения. Это вращение может приводить к вращению узла 120 управления направлением бурения вокруг продольной оси 126 и вращению бурового долота 116 вокруг обеих продольных осей 124, 126. Вращение бурового долота 116 вокруг своей продольной оси 124 приводит к врезанию бурового долота 116 в подземные пласты 110a,b. Тем не менее, вращение бурового долота 116 вокруг продольной оси 126 узла 120 управления направлением бурения в некоторых случаях может быть нежелательным, поскольку это может изменить угловую ориентацию бурового долота 116 по отношению к выбуриваемым подземным пластам 110a,b. Например, в случае, если продольная ось 124 бурового долота 116 смещена от продольной оси 126 узла 120 управления направлением бурения, как проиллюстрировано на Фиг. 1, буровое долото 116 может вращаться вокруг продольной оси 126 узла управления направлением бурения, и, таким образом, предотвращать бурение буровым снарядом 100 под определенным углом и в определенном направлении, что может привести к созданию большей скважины.
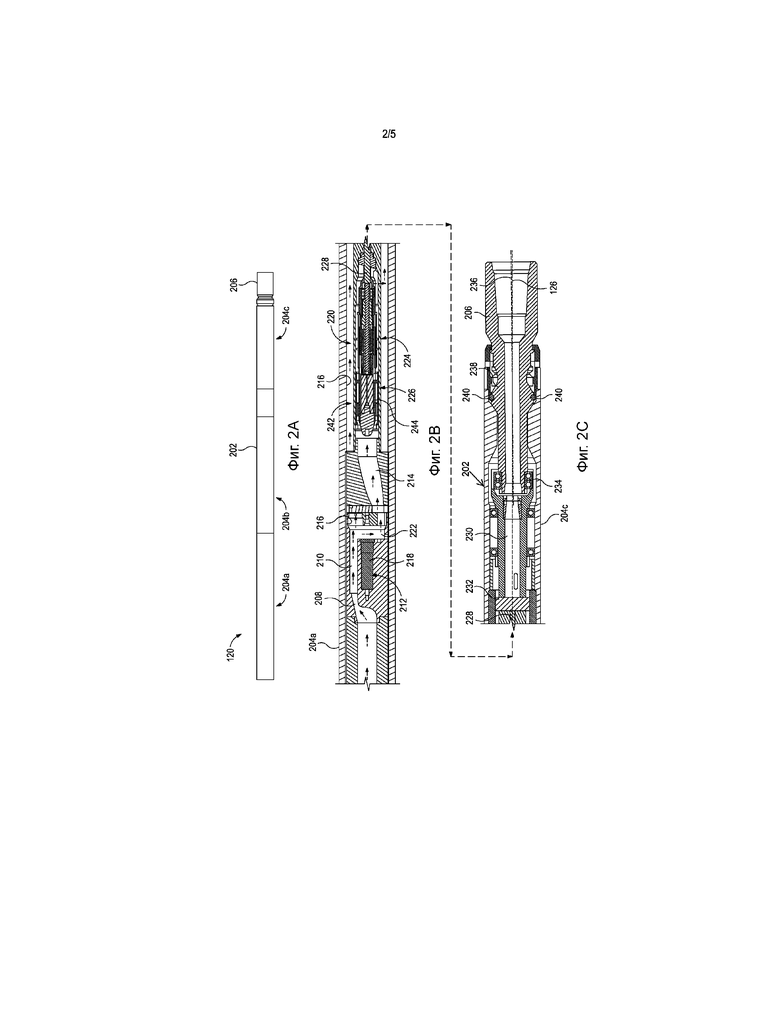
[0018] Теперь обратимся к Фиг. 2A-2C, продолжая ссылаться на Фиг. 1, иллюстрирующим схематические изображения узла 120 управления направлением бурения, соответствующего одному или более вариантам реализации изобретения. В частности, на Фиг. 2A проиллюстрирован вид сверху узла 120 управления направлением бурения, на Фиг. 2B проиллюстрирован вид сбоку в поперечном разрезе первого участка узла 120 управления направлением бурения и на Фиг. 2C проиллюстрирован вид сбоку в поперечном разрезе второго участка узла 120 управления направлением бурения. Узел 120 управления направлением бурения может содержать корпус 202, который может быть функционально связан с бурильной колонной 114 (Фиг. 1). В некоторых вариантах реализации изобретения корпус 202 может быть соединен непосредственно с бурильной колонной 114. Но в других вариантах реализации изобретения корпус 202 может быть косвенно соединен с бурильной колонной 114, например, через устройство 118 ИВБ (Фиг. 1), но все же функционально связан с бурильной колонной 114 таким образом, что вращение бурильной колонны 114 соответствующим образом вращает корпус 202.
[0019] В некоторых вариантах реализации изобретения корпус 202 может заключать в себе выполненную как единое целое или же единую структуру. Но в других вариантах реализации изобретения корпус 202 может содержать несколько секций, изображенных как первая секция 204a, вторая секция 204b и третья секция 204c. Каждая секция 204a-c может соответствовать отдельной приборной части узла 120 управления направлением бурения. Например, секция 204a может вмещать механизмы управления для узла 120 управления направлением бурения и может осуществлять связь с управляющим устройством 128 (Фиг. 1) и/или принимать управляющие сигналы с поверхности 104 (Фиг. 1). В некоторых вариантах реализации изобретения механизмы управления могут содержать системы обработки информации и машиночитаемые носители и могут принимать данные измерений от различных датчиков, расположенных внутри узла 120 управления направлением бурения. Датчики, которые могут входить в сенсорный узел 120, включают, но не ограничиваются только ими: датчик положения или гравитационный датчик для измерения направления торца бурового режущего инструмента 122 (Фиг. 1), датчики частоты вращения и датчики вибраций. Данные, полученные от этих датчиков, могут быть заложены в замкнутую систему обратной связи, которая помогает точно направлять буровое долото 116 (Фиг. 1) в процессе бурения, как описано ниже. Вторая секция 204b может содержать элементы привода, содержащие канал изменяемой циркуляции и управляемый потоком приводной механизм. Третья секция 204c может содержать элементы управления направлением бурения, которые регулируют угол бурения и ориентацию оси бурового долота 116, соединенного с валом 206 долота узла 120 управления направлением бурения.
[0020] В процессе операций по бурению буровой раствор или «буровой глинистый раствор» могут закачивать в бурильную колонну 114 (Фиг. 1), а затем через узел 120 управления направлением бурения. Буровой раствор может протекать через одно или более отверстий 208 в кольцевое пространство 210, ограниченное в первой секции 204a. После попадания в кольцевое пространство 210 буровой раствор может протекать вокруг модуля 212 управления течением и далее протекать во внутреннее кольцевое пространство 214, либо может быть перенаправлен в обводное кольцевое пространство 216. Модуль 212 регулирования расхода может содержать клапан 218 регулирования расхода, который управляет количеством бурового раствора, поступающим во внутреннее кольцевое пространство 214 для приведения в движение управляемого флюидом приводного механизма 220. Более конкретно, канал протекания флюида, пролегающий между отверстием 208 и внутренним кольцевым пространством 214, может содержать канал 222 изменения расхода флюида, и клапан 218 регулирования расхода может быть выполнен с возможностью дозирования количества флюида, проходящего через канал 222 изменения расхода флюида. Клапан 218 регулирования расхода может быть клапаном или устройством ограничения потока любого типа, включая, но не ограничиваясь только ими: срезной клапан, тарельчатый клапан, шаровой клапан, проходной клапан или механические устройства любого другого типа, которые выполненные с возможностью управления расходом бурового раствора. Тем не менее будет очевидно, что могут применяться и другие каналы 222 изменения расхода с клапанами, имеющими различные конфигурации, которые дозируют расход бурового раствора.
[0021] Управляемый флюидом приводной механизм 220 может быть в гидравлическом сообщении с каналом 222 изменения расхода флюида через внутреннее кольцевое пространство 214. В проиллюстрированном варианте реализации изобретения управляемый флюидом приводной механизм 220 содержит турбину, но можно использовать другие управляемые флюидом приводные механизмы, например, забойный двигатель. Кроме того, управляемый флюидом приводной механизм 220 может быть заменен на исполнительный привод любого типа, выполненный с возможностью вращения ведущего вала. Соответственно, управляемый флюидом приводной механизм 220 в альтернативном варианте может содержать исполнительный привод, например, электродвигатель, забойный двигатель и т.д. В целях описания узла 120 управления направлением бурения, однако, управляемый флюидом приводной механизм 220 в контексте данного изобретения будут называть «турбина 220», но такая терминология не должна рассматриваться как ограничивающая настоящее раскрытие изобретения. Турбина 220 может содержать множество роторов 224 и множество статоров 226, совместно работающих для генерирования вращательного движения в ответ на протекание флюида внутри внутреннего кольцевого пространства 214.
[0022] Турбина 220 (или исполнительный привод любого другого типа) может генерировать вращение в приводном вале 228, который может быть функционально связан с отклоняющим шпинделем 230 через планетарный редуктор 232, расположенный внутри корпуса 202. Как будет описано более подробно ниже, планетарный редуктор 232 может быть функционально связан с корпусом 202 таким образом, что вращение корпуса 202 соответствующим образом вращает часть планетарного редуктора 232. В процессе работы планетарный редуктор 232 может позволять приводному валу 228 передавать вращение от турбины 220 отклоняющему шпинделю 230 таким образом, что отклоняющий шпиндель 230 может вращаться независимо от корпуса 202. Отклоняющий шпиндель 230 может быть присоединен к планетарному редуктору 232 на одном конце, а на его противоположном конце может содержаться или же может быть предусмотрено эксцентриковое гнездо 234. Верхний конец вала 206 долота может приниматься в эксцентриковом гнезде 234, которое можно использовать для изменения или поддержания положения продольной оси 236 вала 206 долота и бурового долота 116 (Фиг. 1), соединенного с валом 206 долота. Продольная ось 236 вала 206 долота может совпадать с продольной осью 124 (Фиг. 1) бурового долота 116 и, следовательно, эксцентриковое гнездо 234 можно использовать для изменения или поддержания положения продольной оси 124 бурового долота 116 в процессе работы.
[0023] Вал 206 долота может быть поворотно присоединен к корпусу 202 в шарнирном 238 узле. Ряд шариковых подшипников 240 может позволять валу 206 долота поворачиваться относительно корпуса 202. Как будет понятно, это соединение может содержать любое механическое соединение таким образом, что верхний и нижний участки соединения заблокированы по вращению относительно друг друга, но могут свободно изгибаться в пределах ограничений, обеспечиваемых отклоняющим шпинделем 230. В ходе того, как вал 206 долота поворачивается вокруг шарнирного 238 узла, продольная ось 236 вала 206 долота изменяется, что может отклонить продольную ось 236 вала 206 долота относительно продольной оси 126 узла 120 управления направлением бурения. Помимо возможности поворота вала 206 долота относительно корпуса 202, шарнирный 238 узел также может применяться для передачи крутящего момента от корпуса 202 к валу 206 долота. Крутящий момент, полученный от корпуса 202, может быть передан буровому долоту 116 (Фиг. 1), как присоединенному к концу вала долота 206 и, следовательно, продольная ось 236 вала долота 206 может соответствовать углу бурения узла 120 управления направлением бурения.
[0024] При типовой работе узла 120 управления направлением бурения бурильная колонна 114 (Фиг. 1) может вращаться и, таким образом, вызывать вращение корпуса 202 вокруг продольной оси 126 узла управления направлением бурения. Вращение корпуса 202 может вызывать вращение вала 206 долота, поскольку в шарнирном 238 узле крутящий момент передается валу долота 206. Действие крутящего момента может вызвать вращение вала 206 долота вокруг своей продольной оси 236, а также продольной оси 126 узла 120 управления направлением бурения. В случае, если продольная ось 236 вала 206 долота смещена относительно продольной оси 126 узла 120 управления направлением бурения, это может вызвать вращение конца вала 206 долота относительно продольной оси 126 узла управления направлением бурения, тем самым изменяя угловое направление вала 206 долота и связанного с ним бурового долота 116 (Фиг. 1) по отношению к окружающим пластам 110a,b (Фиг. 1).
[0025] В некоторых вариантах реализации изобретения может быть желательным управлять частотой вращения турбины 220 посредством изменения входного или изменения целевого выходного значения. Например, поток флюида, проходящий через отверстие 208, может быть пульсирующим, и может быть необходимым поддерживать постоянную частоту вращения турбины 220. В альтернативном варианте может быть необходимым увеличить частоту вращения турбины 220 посредством пропускания большего количества флюида через отверстие 208. В таких вариантах реализации изобретения могут приводить в действие клапан 218 регулирования расхода для управления количеством/расходом бурового раствора, который поступает во внутреннее кольцевое пространство 214 для приведения в движение турбины 220. В соответствии с аспектами настоящего изобретения частоту вращения турбины 220 можно регулировать, управляя массовым расходом бурового раствора, который втекает во внутреннее кольцевое пространство 214. Следовательно, могут применять клапан 218 регулирования расхода для управления частотой вращения турбины 220 посредством изменения массового расхода бурового раствора, который втекает во внутреннее кольцевое пространство 214. Клапан 218 регулирования расхода может содержать электронную схему управления, соединенную с двигателем, которая функционирует с возможностью открытия и закрытия клапана 218 регулирования расхода. Электронная схема управления может быть расположена в скважине, например, рядом с клапаном 218 регулирования расхода, или в альтернативном варианте может быть расположена на поверхности 104 (Фиг. 1), например, образуя часть управляющего устройства 128 (Фиг. 1).
[0026] В некоторых вариантах реализации изобретения в узле 120 управления направлением бурения может содержаться генератор 242 и он может быть присоединен к турбине 220 для генерирования электрической энергии, которая может использоваться компонентами узла 120 управления направлением бурения. В некоторых случаях генератор 242 может производить изменение электрических нагрузок и/или флюид может проходить с переменной скоростью во внутреннем кольцевом пространстве 214. В случае, если на генераторе 242 присутствуют более высокие электрические нагрузки, частота вращения турбины 220 может снижаться. Кроме того, при значительном снижении частоты вращения генератора 242 он не может вырабатывать требуемое напряжение, поскольку выходное напряжение генератора 242 пропорционально частоте вращения генератора 242. По меньшей мере в одном варианте реализации изобретения генератор 242 может быть установлен на статоре 226 турбины 220 или рядом с ним, который может быть магнитно связан с валом, несущим роторы 224, посредством одного или более электромагнитов 244. В ходе того, как турбина 220 вращается, то же самое происходит с валом, несущим роторы 224, что может вызывать вращение электромагнита(ов) 244 вокруг статоров 226. Это может приводить к выработке в генераторе 242 электрического тока, который можно использовать для питания различных механизмов управления и датчиков, расположенных внутри узла 120 управления направлением бурения, включая механизмы управления, расположенные внутри первой секции 204а.
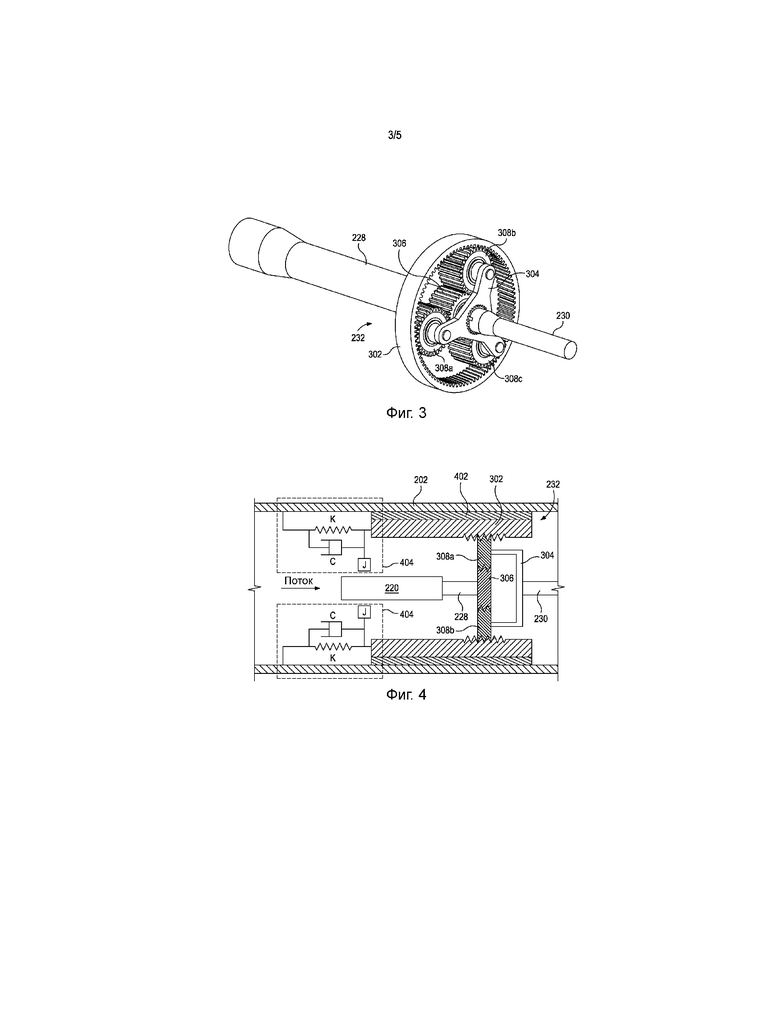
[0027] Ссылаясь на Фиг. 3, а также ссылаясь на Фиг. 2A-2C, можно увидеть проиллюстрированный изометрический вид планетарного редуктора 232 в соответствии с одним или более вариантами реализации изобретения. Планетарный редуктор 232 в целом можно охарактеризовать как механизм управления частотой вращения/положением в соответствии с аспектами настоящего раскрытия изобретения. Как проиллюстрировано, планетарный редуктор 232 может содержать зубчатый венец 302, водило планетарной передачи 304 и центральную шестерню 306. Водило планетарной передачи 304 проиллюстрировано содержащим три сателлита, изображенных как первый сателлит 308a, второй сателлит 308b и третий сателлит 308c. В других вариантах реализации изобретения, однако, может использоваться более или менее, чем три сателлита 308a-c, без отступления от объема настоящего раскрытия изобретения.
[0028] Как описано выше, планетарный редуктор 232 может быть установлен внутри узла 120 управления направлением бурения (Фиг. 2A-2C) и функционально связан с внутренними стенками корпуса 202 таким образом, что вращение корпуса 202 может вызвать аналогичное вращение зубчатого венца 302. Центральная шестерня 306 может быть присоединена к или же образовывать часть приводного вала 228 турбины 220 (Фиг. 2B) таким образом, что вращение приводного вала 228 (приводимого в движение посредством турбины 220) может соответствующим образом вращать центральную шестерню 306 в том же направлении. Отклоняющий шпиндель 230 может быть присоединен к водилу планетарной передачи 304 таким образом, что вращение водила 304 вокруг центральной шестерни 306 может вызывать соответствующее вращение отклоняющего шпинделя 230. Вращение отклоняющего шпинделя 230 может управляться частотой вращения водила планетарной передачи 304, которая, в свою очередь, может определяться относительными частотами вращения центральной шестерни 306 и зубчатого венца 302.
[0029] Например, в случае, когда зубчатый венец 302 вращается по часовой стрелке с более высокой частотой вращения по отношению к вращению центральной шестерни 306 против часовой стрелки, водило планетарной передачи 304 будет вращаться в направлении по часовой стрелке вокруг центральной шестерни 306, что может привести к вращению отклоняющего шпинделя 230 в направлении по часовой стрелке. По мере того, как центральная шестерня 306 увеличивает частоту вращения против часовой стрелки по отношению к частоте вращения зубчатого венца 302, например, в случае уменьшения частоты вращения корпуса 202 (Фиг. 2), присоединенного к зубчатому венцу 302, или в результате увеличения частоты вращения центральной шестерни 306, приводимой в движение турбиной 220, частота вращения водила планетарной передачи 304 вокруг центральной шестерни 306 будет замедляться до тех пор, пока при определенной частоте вращения центральной шестерни 306 водило планетарной передачи 304 не станет неподвижным (хотя отдельные сателлиты 308a-c могут продолжать вращение). В этот момент отклоняющий шпиндель 230 также может оставаться вращательно неподвижным. В случае, когда центральная шестерня 306 в дальнейшем увеличивает частоту вращения, водило планетарной передачи 304 может начать вращение в направлении против часовой стрелки, таким образом, вызывая вращение отклоняющего шпинделя 230 также в направлении против часовой стрелки.
[0030] Как описано более подробно ниже, механизм или программа управления с замкнутым контуром могут использовать, не ограничиваясь только этим, регулировочное устройство ПИД-типа (пропорциональное, интегральное, дифференциальное), которое считывает значения измерений входного датчика от отклоняющего шпинделя 230 и выводит сигналы управления на турбину 220. Значение погрешности можно рассчитать, основываясь на сравнении разницы, измеренной одним или более датчиками, между частотой вращения и положением отклоняющего шпинделя 230 с целевой частотой вращения. В случае, когда, например, измеренное вращение отклоняющего шпинделя 230 в направлении по часовой стрелке больше, чем требуется (или недостаточное в направлении против часовой стрелки), например, в случае, если зубчатый венец 302 увеличивает его частоту вращения по часовой стрелке, для увеличения частоты вращения турбины 220 выходной сигнал может передаваться таким образом, чтобы увеличить частоту вращения центральной шестерни 306 в направлении против часовой стрелки. Аналогично, в случае, когда измеренное вращение отклоняющего шпинделя 230 в направлении по часовой стрелке меньше, чем требуется (или недостаточное в направлении против часовой стрелки), например, в случае, если зубчатый венец 302 уменьшает его частоту вращения по часовой стрелке, для уменьшения частоты вращения турбины 220 выходной сигнал может передаваться таким образом, чтобы уменьшить частоту вращения центральной шестерни 306 в направлении против часовой стрелки.
[0031] Соответственно, несмотря на изменения в частоте вращения зубчатого венца 302 (учитывая, что он функционально связан с корпусом 202 по Фиг. 2), частота вращения отклоняющего шпинделя 230 может быть независимо управляемой посредством изменения частоты вращения турбины 220. В результате этого турбина 220 может помогать поддерживать отклоняющий шпиндель 230 в неподвижном невращающемся положении или ориентации. В дальнейшем, в случае, когда желательной является определенная ориентация, турбина 220 может вначале приводиться в действие для обеспечения вращения до тех пор, пока отклоняющий шпиндель 230 не будет выровнен по желательной ориентации, а затем будет работать на поддержание этой желательной ориентации.
[0032] Снова со ссылкой на Фиг. 2A и 2B, продолжая ссылаться на Фиг. 3, можно увидеть совместную работу турбины 220 и планетарного редуктора 232 по регулированию угловой ориентации вала долота 206 и, следовательно, бурового долота 116 (Фиг. 1) учитывая, что он присоединен к валу долота 206. Зубчатый венец 302 планетарного редуктора 232 может быть функционально связан с корпусом 202 таким образом, что вращение корпуса 202 может вызывать соответствующее вращение зубчатого венца 302. Приводной вал 228 турбины 220 может быть присоединен к центральной шестерне 306 и вращение центральной шестерни 306 может быть увеличено или уменьшено посредством регулирования клапана 218 регулирования расхода для регулирования потока бурового раствора через турбину 220 и, следовательно, увеличения или уменьшения частоты вращения (об/мин) приводного вала 228. Отклоняющий шпиндель 230 может быть присоединен к водилу планетарной передачи 304 таким образом, что положение и вращение водила планетарной передачи 304 может регулировать угловую ориентацию и частоту вращения отклоняющего шпинделя 230 и, следовательно, вала долота 206. Посредством работы планетарного редуктора 232, вращение водила планетарной передачи 304 может определяться или же обуславливаться относительными частотами вращения зубчатого венца 302 и центральной шестерни 306.
[0033] В процессе бурения бурильная колонна 114 (Фиг. 1) может вращаться в первом направлении с первой скоростью, вызывая вращение корпуса 202 и зубчатого венца 302 планетарного редуктора 232 в первом направлении с первой скоростью. Для регулирования угловой ориентации вала 206 долота по отношению к окружающему пласту 110a,b (Фиг. 1), для обеспечения потока бурового раствора через турбину 220 клапан 218 регулирования расхода могут приводить в действие таким образом, чтобы приводной вал 228 вращался во втором направлении. Вращение приводного вала 228 может вызывать вращение центральной шестерни 306 планетарного редуктора 232 в обратном направлении к первому направлению со второй скоростью в зависимости от количества расхода флюида, пропущенного клапаном 218 регулирования расхода через турбину 220. Внутри планетарного редуктора 232 относительная разница между первой частотой вращения зубчатого венца 302 и второй частотой вращения центральной шестерни 306 определяет вращение водила планетарной передачи 304 и, таким образом, вращение отклоняющего шпинделя 230. Если вращение центральной шестерни 306 отклоняет вращение зубчатого венца 302, тогда водило планетарной передачи 304 (и, таким образом, эксцентриковое гнездо 234 отклоняющего шпинделя 230) может оставаться геостационарным по отношению к окружающему пласту, и тем самым поддерживать угловую ориентацию вала 206 долота относительно пласта, при этом позволяя валу 206 долота вращаться вокруг своей продольной оси 236. Угловая ориентация вала 206 долота может быть изменена по отношению к окружающему пласту 110a,b посредством приведения в действие клапана 218 регулирования расхода для увеличения или уменьшения частоты вращения турбины 220.
[0034] В некоторых вариантах реализации изобретения отклоняющий шпиндель 230, вал 206 долота или буровое долото 116 (Фиг. 1) присоединенное к валу 206 долота, может содержать или находиться вблизи датчиков (не показаны), таких как датчики частоты вращения, позиционные датчики, акселерометры, магнитометры или другие датчики, известные специалистам в данной области техники. Различные датчики могут быть выполнены с возможностью постоянно контролировать частоту вращения, положение, ориентацию или другие физические свойства отклоняющего шпинделя 230 и вала 206 долота или бурового долота 116. Необходимая частота вращения, положение, магнитное выравнивание или другие необходимые уставки для операции бурения могут сравнивать в непрерывном режиме со значениями, измеренными датчиками. Датчики могут быть присоединены к электронному оборудованию (не показано), расположенному в скважине, на поверхности 104 (Фиг. 1) или в удаленном местоположении. Электронное оборудование, связанное с датчиками, может выдавать сигналы погрешности, которые можно обрабатывать для установления взаимосвязи измеренного значения с изменением положения клапана 218 регулирования расхода с целью достижения необходимой уставки. На основании сигнала погрешности, клапан 218 регулирования расхода может затем изменять положение, таким образом изменяя расход флюида, проходящего через турбину 220, тем самым приводить к изменению частоты вращения турбины 220 и посредством планетарного редуктора 232 вызывать изменение частоты вращения отклоняющего шпинделя 230. Этот процесс могут повторять до тех пор, пока не будет достигнута необходимая уставка (или до тех пор, пока система не будет находиться в пределах допустимого интервала погрешности).
[0035] Ссылаясь на Фиг. 4, продолжая ссылаться на Фиг. 3, можно увидеть проиллюстрированный детальный вид в поперечном разрезе планетарного редуктора 232, функционально связанного с турбиной 220 и корпусом 202, в соответствии с одним или более вариантами реализации изобретения. Как проиллюстрировано, приводной вал 228 турбины 220 пролегает по направлению к планетарному редуктору 232 и присоединен к центральной шестерне 306 таким образом, что вращение приводного вала 228 (приводимого в движение посредством протекания флюида через турбину 220) соответствующим образом вращает центральную шестерню 306 в том же направлении. Два сателлита, показанные как первый и второй сателлиты 308a,b, проиллюстрированы, как поддерживаемые водилом планетарной передачи 304 и выполнены с возможностью вращения относительно зубчатого венца 302. Отклоняющий шпиндель 230 может быть присоединен к водилу планетарной передачи 304 таким образом, что вращение водила 304 вокруг центральной шестерни 306 вызывает соответствующее вращение отклоняющего шпинделя 230.
[0036] Планетарный редуктор 232 может быть функционально связан с корпусом 202 таким образом, что вращение корпуса 202 (посредством вращения бурильной колонны 114 по Фиг. 1) соответствующим образом вращает зубчатый венец 302. В некоторых вариантах реализации изобретения зубчатый венец 302 может быть соединен непосредственно с корпусом 202. В других вариантах реализации изобретения, однако, кожух или каркас редуктора 402 может быть установлен между корпусом 202 и зубчатым венцом 302 или же может быть присоединен к корпусу 202, чтобы функционально связывать зубчатый венец 302 с корпусом 202. В любом случае прямое или косвенное соединение зубчатого венца 302 с корпусом 202 будет приводить к вращению зубчатого венца 302 в ответ на вращение корпуса 202.
[0037] Как проиллюстрировано, планетарный редуктор 232 может быть функционально связан с корпусом 202 через механическое соединение 404, изображенное графически, посредством одного или более механических параметров. Механическое соединение 404 может заключать в себе или же содержать любую соединительную конструкцию, устройство, механизм, систему или узел, способный механически соединять планетарный редуктор 232 с корпусом 202 непосредственно через зубчатый венец 302 либо через каркас редуктора 402. Подходящие механические соединения 404 включают, но не ограничиваются только ими: резьбовое соединение, магнитное соединение, сварное соединение, паяное соединение, механически прикрепленное соединение (т.е., с использованием механических крепежных деталей, например, винтов, болтов, штифтов, стопорных колец и т.д.), адгезионное соединение, пневматический упругий элемент, звездообразное соединение и любую их комбинацию.
[0038] При соединении планетарного редуктора 232 с корпусом 202 механическое соединение 404 может иметь различные механические параметры. Как проиллюстрировано, механические параметры, характеризующие механическое соединение 404 включают, но не ограничиваются только ими: константу пружины кручения (k), коэффициент затухания (c) и момент инерции (J). В зависимости от значения каждого механического параметра, механическое соединение 404 может обеспечивать более жесткое либо более гибкое сцепление между планетарным редуктором 232 и корпусом 202.
[0039] Согласно настоящему раскрытию изобретения, механическое соединение 404 можно выбирать, основываясь на его известных механических параметрах, или же механические параметры механического соединения 404 могут быть оптимизированы для работы в скважине. Это может быть эффективным в случае, если бурильная колонна 114 (Фиг. 1) подвергается прихвату-проскальзыванию, например, в связи с тем, что функциональная связь зубчатого венца 302 с корпусом 202 приводит к тому, что любое изменение числа об/мин корпуса 202 будет передаваться непосредственно на зубчатый венец 302, и, таким образом, непосредственно влиять на управление отклоняющим шпинделем 230. Более конкретно, если бурильная колонна 114 подвергается прихвату-проскальзыванию, тогда колебательная частота вращения (об/мин) бурильной колонны 114 может передаваться на зубчатый венец 302 посредством механического соединения 404 с корпусом 202. Такая колебательная частота вращения, называемая в данном документе «возмущение от прихвата-проскальзывания», может передаваться на отклоняющий шпиндель 230, и, следовательно, требуется, чтобы система управления быстро уменьшила возмущение от прихвата-проскальзывания в попытке поддерживать отклоняющий шпиндель 230 геостационарно. Тем не менее, в случае, когда возмущение от прихвата-проскальзывания изменяется с достаточно высокой частотой, работы турбины 220 и клапана 218 регулирования расхода, описанной выше, может оказаться недостаточно для преодоления неблагоприятных воздействий, и впоследствии может нарушиться работа планетарного редуктора 232 по компенсации вращения зубчатого венца 302. Более конкретно, управление торцом бурового режущего инструмента 122 (Фиг. 1) при высокой частоте прихвата-проскальзывания (в диапазоне рабочих частот системы) может требовать большой мощности и даже тогда может быть нестабильным из-за неэффективной работы контроллера.
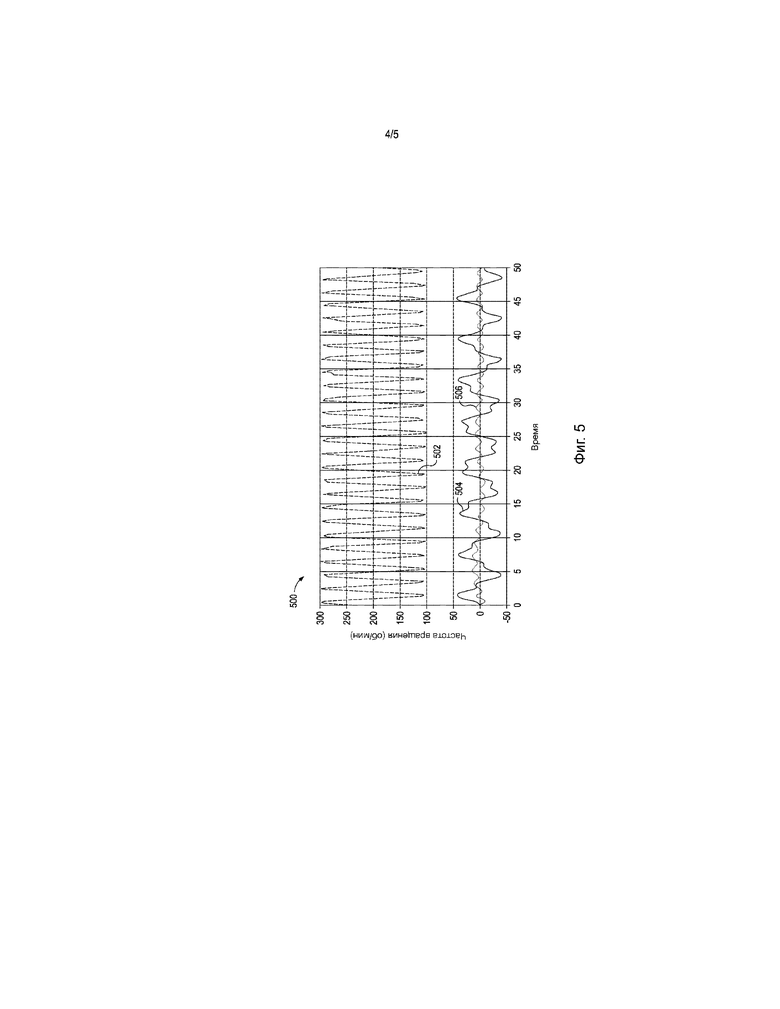
[0040] В качестве дополнительного пояснения, на Фиг. 5 проиллюстрирован график 500, на котором смоделировано воздействие жесткой механической связи 404 по сравнению с более гибкой механической связью 404, учитывая возмущение от прихвата-проскальзывания, согласно принципам настоящего раскрытия изобретения. На графике 500 прихват-проскальзывание корпуса 202 смоделирован посредством первой кривой 502. Как указано, частота вращения корпуса 202 в смоделированном процессе прихвата-проскальзывания колеблется в интервале между около 100 об/мин и около 300 об/мин. Как указано выше, эта колебательная частота вращения может генерировать возмущение от прихвата-проскальзывания, которое может передаваться на отклоняющий шпиндель 230 посредством механического соединения 404 между планетарным редуктором 232 и корпусом 202, и, следовательно, влиять на частоту вращения и угловую ориентацию отклоняющего шпинделя 230. Это видно из второй кривой 504, проиллюстрированной на графике 500, которая представляет собой частоту вращения отклоняющего шпинделя 230 при допущении, что возмущение от прихвата-проскальзывания передается посредством жесткого механического соединения. Жесткое механическое соединение, например, может обладать механическими параметрами, которые приводят к передаче большего возмущения от прихвата-проскальзывания между корпусом 202 и планетарным редуктором 232 по сравнению с более гибким механическим соединением. Как указано, частота вращения отклоняющего шпинделя 230 колеблется в интервале между около 45 об/мин и -45 об/мин в случае, если используют жесткое механическое соединение, учитывая возмущение от прихвата-проскальзывания.
[0041] Для уменьшения воздействий возмущения от прихвата-проскальзывания на отклоняющий шпиндель 230, турбиной 220 и клапаном 218 регулирования расхода можно управлять или регулировать их, чтобы компенсировать переменную частоту вращения и приблизить частоту вращения к 0 об/мин, при этом отклоняющий шпиндель 230 поддерживают геостационарно. Однако, попытка уменьшения возмущения от прихвата-проскальзывания в некоторых случаях может привести к тому, что потребуется большая мощность, что перегружает систему управления, тем самым приводя к большим нагрузкам, повышенному износу компонентов, снижению надежности и, в конечном счете, ухудшению эффективности бурения. В определенных ситуациях турбина 220 не может работать ниже определенного числа об/мин из-за ограничений, налагаемых на узел электрическими компонентами, например, генератором, тем самым предотвращая снижение числа об/мин инструмента до 0 об/мин посредством турбины 200.
[0042] Согласно настоящему раскрытию изобретения, возмущение от прихвата-проскальзывания можно уменьшить или полностью устранить посредством манипулирования механическими параметрами механического соединения 404, что может привести к более гибкому механическому соединению, которое уменьшает силы противодействия прихвата-проскальзывания, передающиеся от корпуса 202 на зубчатый венец 302 посредством механического соединения 404. Это видно из третьей кривой 506, проиллюстрированной на графике 500, которая представляет собой частоту вращения отклоняющего шпинделя 230 с использованием механического соединения 404, которое является более гибким по сравнению с механическим соединением 404 из первой кривой 504. Как видно, частота вращения отклоняющего шпинделя 230 колеблется вблизи 0 об/мин в случае использования более гибкого механического соединения, что свидетельствует о том, что возмущение от прихвата-проскальзывания уменьшается в случае, если сравнивать со второй кривой 504.
[0043] Согласно Фиг. 4 оператор (или автоматизированная компьютерная система) может принимать во внимание механические параметры механического соединения 404 для конкретного применения, чтобы уменьшить или устранить неблагоприятные воздействия прихвата-проскальзывания, передающиеся от корпуса 202 на зубчатый венец 302. В некоторых вариантах реализации изобретения механическими параметрами (например, константой пружины кручения (k), коэффициентом затухания (c), моментом инерции (J) и т.д.) можно манипулировать или же оптимизировать их посредством изменения типа механического соединения 404, используемого в узле 120 управления направлением бурения. Например, резьбовое соединение может быть заменено на механически закрепленное зацепление для получения механического соединения 404, которое является более гибким и, следовательно, лучше приспособленным для уменьшения возмущения от прихвата-проскальзывания. В других вариантах реализации изобретения механическими параметрами можно манипулировать или же оптимизировать их посредством изменения материалов одного или обоих: корпуса 202 и зубчатого венца 302. Еще в других вариантах реализации изобретения механическими параметрами можно манипулировать или же оптимизировать их посредством добавления демпфирующих материалов к механическому соединению 404, которое может быть установлено между жесткими компонентами корпуса 202 и зубчатым венцом 302. Подходящие демпфирующие материалы включают, но не ограничиваются только ими: мягкие металлы, эластомеры, пены, любую их комбинацию и т.п. Еще в дополнительных вариантах реализации изобретения механическими параметрами механического соединения 404 можно манипулировать или же оптимизировать их в режиме реального времени в процессе операций по бурению, например, посредством использования одного или более исполнительных приводов.
[0044] В некоторых вариантах реализации изобретения константу пружины кручения (k) можно модифицировать посредством введения одного или более эластичных компонентов, например, пневматического упругого элемента, звездообразного соединения или соединений гибкого типа. Жесткостью при кручении (k) также можно манипулировать или же модифицировать ее посредством изменения длины соединения между корпусом 202 и зубчатым венцом 302. Следует, однако, понимать, что гидравлическое соединение любого типа с переменной вязкостью может достигать, по существу, того же самого.
[0045] Ссылаясь на Фиг. 6, продолжая ссылаться на предыдущие фигуры, проиллюстрирована блок-схема системы управления по замкнутому контуру 600, в соответствии с одним или более вариантами реализации изобретения по настоящему раскрытию изобретения. На этапе 610 в контроллер 620 могут ввести целевую уставку посредством электрического контура. Целевая уставка может устанавливать целевую частоту вращения, положение, магнитное выравнивание или другую измеряемую характеристику. По меньшей мере в одном варианте реализации изобретения целевая уставка может соответствовать желательному направлению торца бурового режущего инструмента 122 (Фиг. 1) и, следовательно, желательной продольной оси 124 (Фиг. 2) бурового долота 116 (Фиг. 1). На этапе 620 контроллер может принимать значения измерений 680 датчика через электрический контур и вычислять погрешность между уставкой и измеренным значением. На основании рассчитанной погрешности контроллер 620 может выводить сигнал на электродвигатель и устройство управления, как на этапе 630. Контроллер 620 может быть, например, контроллером ПИД-типа, который выполнен с возможностью определения выходного сигнала, основываясь на комбинации пропорциональных, интегральных и дифференциальных вычислений погрешности.
[0046] На этапе 630 электродвигатель и устройство управления (например, исполнительный привод или двигатель любого типа) могут принимать выходной сигнал от контроллера 620. Электродвигатель может быть механически присоединенным к клапану регулирования расхода, например, клапану 218 регулирования расхода по Фиг. 2B. На основании сигнала, принятого от контроллера 620, электродвигатель и устройство управления на этапе 630 могут работать на открытие или закрытие клапана регулирования расхода. На этапе 640 клапан регулирования расхода может подвергаться общему расходу флюида через инструмент в динамике 692, представленной в виде функции Q(t). Некоторую часть общего расхода флюида через инструмент в динамике Q(t) могут отводить в обводное кольцевое пространство, например, в обводное кольцевое пространство 216 по Фиг. 2B, и ее можно представить в виде обводного расхода в динамике q2(t). Оставшийся флюид могут направить в управляемый флюидом приводной механизм, например, турбину 220 по Фиг. 2B, и его можно представить в виде расхода флюида через турбину q1(t). Таким образом, в замкнутой системе Q(t) будет равна сумме q1(t) и q2(t). Относительные величины q1(t) и q2(t) можно изменять, основываясь на открытии и закрытии клапана регулирования расхода посредством электродвигателя и устройства управления на этапе 630.
[0047] На этапе 650 управляемый флюидом приводной механизм (например, турбина 200) может генерировать вращательное усилие на своем приводном вале 228 (Фиг. 2B) для соответствующего вращения центральной шестерни 306 (Фиг. 3), как на этапе 666. Центральная шестерня 306 образует часть планетарного редуктора 232 (Фиг. 2C и 3), как на этапе 660. Величина вращательного усилия может изменяться в зависимости от величины расхода флюида через турбину q1(t).
[0048] В процессе работ по бурению бурильная колонна 114 (Фиг. 1) может вращаться и, следовательно, вызывать вращение корпуса 202 (Фиг. 2A). Это вращательное усилие, как на этапе 694, может быть представлено в виде числа об/мин корпуса в динамике ω(t) и в виде крутящего момента T(t) корпуса и может механически передаваться на любые компоненты, механически присоединенные к корпусу 202. Вращательное усилие, как на этапе 694, проиллюстрировано прикладываемым к двигателю 630, клапану регулирования расхода 640, управляемому флюидом приводному механизму 650 и зубчатому венцу 302 (Фиг. 3), как на этапе 662, планетарного редуктора 660. Водило планетарной передачи 304 (Фиг. 3), как на этапе 664, является механически присоединенным к зубчатому венцу 662 и будет иметь частоту вращения, определяемую относительными частотами вращения зубчатого венца 662 и центральной шестерни 666.
[0049] На этапе 670 частота вращения водила планетарной передачи 664 механически передается на отклоняющий шпиндель, например, отклоняющий шпиндель 230 (Фиг. 2C и 4). Отклоняющий шпиндель 670 может быть присоединен, например, к валу 206 долота (Фиг. 2A и 2C) и/или буровому долоту 116 (Фиг. 1). В процессе работ по бурению буровое долото 116 может столкнуться с сопротивлением вращению в виде прихвата-проскальзывания, проиллюстрированного в виде момента сопротивления, как на этапе 696, и представленного в динамике как G(t). Момент сопротивления G(t) может содержать возмущение от прихвата-проскальзывания, описанное выше.
[0050] На этапе 680 сеть входных данных в динамике: расхода флюида через турбину q1(t), числа об/мин корпуса ω(t), крутящего момента корпуса T(t), момента сопротивления G(t) и любых других соответствующих входных данных может приводить к значениям измерения 680 датчика, указывающим частоту вращения, положение, магнитное выравнивание или другие измеримые характеристики отклоняющего шпинделя, вала долота и/или бурового долота. В некоторых вариантах реализации изобретения механические параметры механического соединения 404 (т.е. константа пружины кручения (k), коэффициент затухания (c) и момент инерции (J)) также могут влиять на значения измерений датчика 680. Эти значения измерений могут электрически передаваться на контроллер 620, который, в свою очередь, может вычислить обновленное значение погрешности и отрегулировать электрический выходной сигнал на электродвигатель и устройство управления 630. Таким образом, желательная уставка может быть достигнута автоматически посредством механизма управления с замкнутым контуром. Как будет очевидно специалисту в данной области техники в соответствии с настоящим раскрытием изобретения, механизм также может быть устойчивым к сбоям, например, изменениям числа об/мин бурильной колонны, изменениям момента сопротивления G(t) на отклоняющем шпинделе из-за изменяющейся нагрузки на подшипники в процессе бурения, изменениям расхода флюида через инструмент из-за изменений давления или импульсных операций и т.д.
[0051] В альтернативных вариантах реализации изобретения контроллер 620 может быть выполнен с возможностью установления своего выходного сигнала основываясь по меньшей мере частично на ожидаемой будущей погрешности с использованием, например, значений измерений датчиком входных данных, например, расхода флюида через инструмент Q(t), числа об/мин корпуса ω(t), крутящего момента корпуса T(t) и момента сопротивления G(t). Таким образом, например, в случае, когда датчик идентифицирует сбой в расходе флюида через инструмент Q(t), контроллер 620 может соответствующим образом отрегулировать свой выходной сигнал для компенсации наблюдаемого сбоя. Таким образом, контроллер 620 может также предугадывать погрешности и выдавать упреждающие управляющие сигналы для предотвращения погрешностей (например, адаптивный или упреждающий тип управления).
[0052] Раскрытые в данном документе варианты реализации изобретения включают следующие компоненты:
[0053] A. Узел управления направлением бурения, содержащий корпус, имеющий исполнительный привод, установленный в нем и приводимый в действие для вращения приводного вала; планетарный редуктор, установленный внутри корпуса и содержащий зубчатый венец, функционально связанный с корпусом, одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу, и один или более сателлитов, выполненных с возможностью вращения вокруг центральной шестерни; механическое соединение, функционально связывающее зубчатый венец с корпусом таким образом, что при вращении корпуса происходит вращение зубчатого венца, при этом механическое соединение выбирают, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом; и отклоняющий шпиндель, присоединенный к одному из: центральной шестерне или водилу планетарной передачи таким образом, что вращение одного из: центральной шестерни или водила планетарной передачи вызывает соответствующее вращение отклоняющего шпинделя, при этом отклоняющий шпиндель выполнен с возможностью независимого вращения относительно корпуса.
[0054] B. Способ, включающий введение узла управления направлением бурения в скважину на бурильной колонне, причем узел управления направлением бурения содержит корпус, имеющий исполнительный привод и планетарный редуктор, установленный внутри корпуса, причем планетарный редуктор содержит зубчатый венец, функционально связанный с корпусом, и одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу исполнительного привода; вращение бурильной колонны в первом направлении и, таким образом, вращение корпуса и зубчатого венца в первом направлении; приведение в действие исполнительного привода для вращения приводного вала и отклоняющего шпинделя, присоединенного к одному из: центральной шестерне или водилу планетарной передачи во втором направлении, противоположном первому направлению; и уменьшение возмущения от прихвата-проскальзывания, передающегося между корпусом и зубчатым венцом к отклоняющему шпинделю посредством механического соединения, которое функционально связывает зубчатый венец с корпусом, при этом механическое соединение выбирают, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания.
[0055] C. Система скважины, содержащая бурильную колонну, которую можно протянуть в ствол скважины и имеющую буровое долото, присоединенное к концу бурильной колонны; узел управления направлением бурения, размещенный в бурильной колонне и содержащий корпус, выполненный с возможностью вращения вместе с бурильной колонной, причем корпус имеет исполнительный привод и планетарный редуктор, установленный внутри корпуса, причем планетарный редуктор содержит зубчатый венец, функционально связанный с корпусом, и одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу исполнительного привода; механическое соединение, функционально связывающее зубчатый венец с корпусом таким образом, что при вращении корпуса происходит вращение зубчатого венца, при этом механическое соединение выбирают, основываясь на одном или более механических параметрах механического соединения и способности одного или более механических параметров уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом; а также отклоняющий шпиндель, присоединенный к одному из: центральной шестерне или водилу планетарной передачи таким образом, что вращение одного из: центральной шестерни или водила планетарной передачи вызывает соответствующее вращение отклоняющего шпинделя, при этом отклоняющий шпиндель выполнен с возможностью независимого вращения относительно корпуса.
[0056] Каждый из вариантов реализации изобретения A, B и C может включать один или большее количество из следующих дополнительных элементов в любой комбинации: Элемент 1: в котором зубчатый венец соединен непосредственно с корпусом посредством механического соединения. Элемент 2: в котором планетарный редуктор дополнительно содержит каркас редуктора, который установлен между корпусом и зубчатым венцом, и при этом зубчатый венец косвенно соединен с корпусом посредством механического соединения и каркаса редуктора. Элемент 3: в котором механическое соединение содержит сцепление, выбранное из группы, содержащей: резьбовое соединение, магнитное соединение, сварное соединение, паяное соединение, механически прикрепленное соединение, адгезионное соединение, пневматический упругий элемент, звездообразное соединение и любую их комбинацию. Элемент 4: в котором один или более механических параметров являются параметрами, выбранными из группы, состоящей из: константы пружины кручения (k), коэффициента затухания (c) и момента инерции (J). Элемент 5: в котором один или более механических параметров оптимизированы для применения в скважине для уменьшения возмущения от прихвата-проскальзывания. Элемент 6: дополнительно содержащий один или более датчиков, установленных вблизи отклоняющего шпинделя, и контроллер, коммуникативно соединенный с одним или более датчиками, при этом контроллер принимает результаты измерений, сделанные одним или более датчиками, и выдает управляющий сигнал, который вызывает изменение частоты вращения приводного вала. Элемент 7: в котором контроллер представляет собой ПИД-контроллер (пропорционально-интегрально-дифференциальный контроллер). Элемент 8: в котором исполнительный привод является выбранным из группы, содержащей: управляемый флюидом приводной механизм, турбину, забойный двигатель, электрический двигатель и любую их комбинацию.
[0057] Элемент 9: в котором приведение в действие исполнительного привода включает поддержание отклоняющего шпинделя геостационарно по отношению к окружающему пласту. Элемент 10: дополнительно включающий манипулирование одним или более механическими параметрами механического соединения для уменьшения возмущения от прихвата-проскальзывания, причем один или более механических параметров являются параметрами, выбранными из группы, состоящей из: константы пружины кручения (k), коэффициента затухания (c) и момента инерции (J). Элемент 11: в котором манипулирование одним или более механическими параметрами механического соединения включает изменение типа механического соединения на более гибкое механическое соединение. Элемент 12: в котором манипулирование одним или более механическими параметрами механического соединения включает изменение материала по меньшей мере одного из: корпуса или зубчатого венца. Элемент 13: в котором манипулирование одним или более механическими параметрами механического соединения включает добавление демпфирующего материала к механическому соединению. Элемент 14: в котором манипулирование одним или более механическими параметрами механического соединения включает оптимизацию одного или более механических параметров для уменьшения возмущения от прихвата-проскальзывания. Элемент 15: дополнительно включающий установление целевого значения измерений на контроллере, получение по меньшей мере одного значения измерений посредством одного или более датчиков, установленных вблизи отклоняющего шпинделя и коммуникативно соединенных с контроллером, получение по меньшей мере одного значения измерений посредством контроллера, вычисление погрешности, основываясь на сравнении по меньшей мере одного значения измерений с целевым значением измерений, и вывод управляющего сигнала от контроллера для изменения частоты вращения приводного вала, при этом управляющий сигнал основывается на погрешности.
[0058] Элемент 16: в котором механическое соединение содержит сцепление, выбранное из группы, содержащей: резьбовое соединение, магнитное соединение, сварное соединение, паяное соединение, механически прикрепленное соединение, адгезионное соединение, пневматический упругий элемент, звездообразное соединение и любую их комбинацию. Элемент 17: в котором один или более механических параметров являются параметрами, выбранными из группы, состоящей из: константы пружины кручения (k), коэффициента затухания (c) и момента инерции (J). Элемент 18: дополнительно содержащий один или более датчиков, установленных вблизи отклоняющего шпинделя, и контроллер, коммуникативно соединенный с одним или более датчиками, при этом контроллер принимает результаты измерений, сделанные одним или более датчиками, и выдает управляющий сигнал, который вызывает изменение частоты вращения приводного вала.
[0059] В качестве не ограничивающего примера, типовые комбинации, применимые к A, B и C включают: Элемент 10 с Элементом 11; Элемент 10 с Элементом 12; Элемент 10 с Элементом 13; и Элемент 10 с Элементом 14.
[0060] Таким образом, раскрытые системы и способы хорошо подходят для достижения целей и получения преимуществ, указанных выше, а также присущих им. Конкретные варианты реализации изобретения, раскрытые выше, являются лишь иллюстрацией, поскольку идеи настоящего раскрытия изобретения могут быть модифицированы и реализованы с применением отличных, но эквивалентных, способов, очевидных для специалистов в данной области техники, которые ознакомятся с настоящим описанием. Кроме того, для деталей конструкции или схемы, проиллюстрированных в настоящем документе, не предусмотрены никакие ограничения, кроме раскрытых в приведенных ниже пунктах формулы изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены, скомбинированы или модифицированы, при этом считается, что все подобные изменения входят в объем настоящего раскрытия изобретения. Системы и способы, иллюстративно раскрытые в настоящем документе, могут быть соответствующим образом реализованы при отсутствии любого элемента, явным образом не описанного в данном документе, и/или любого дополнительного элемента, описанного в данном документе. Несмотря на то, что сочетания и способы описаны как «содержащие», «имеющие в своем составе» или «включающие» различные компоненты или этапы, эти сочетания и способы также могут «состоять главным образом из» или «состоять из» различных компонентов и этапов. Все числа и диапазоны, описанные выше, могут варьироваться на некоторую величину. Во всех случаях, когда описан числовой диапазон с нижним пределом и верхним пределом, подразумевают, в частности, описание любого числа и любого включенного диапазона, находящегося в пределах указанного диапазона. В частности, каждый диапазон значений (в виде «от приблизительно a до приблизительно b» или, эквивалентно, «от приблизительно a до b» или, эквивалентно, «от приблизительно a-b»), описанный в настоящем документе, следует понимать, как описывающий каждое число и диапазон, входящие в более широкий диапазон значений. Кроме того, термины в формуле изобретения имеют свое простое, обычное значение, если иное явно и четко не определено патентообладателем. Кроме того, применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества выражаемых в ней элементов. При наличии противоречий в применении слова или термина в настоящем описании и одном или большем количестве патентов или других документов, которые могут быть включены в настоящее описание посредством ссылки, следует принимать определения, соответствующие настоящему описанию.
[0061] В контексте настоящего изобретения, выражение «по меньшей мере один из», предшествующее последовательности наименований, со словами «и» или «или» для отделения любого из этих наименований, изменяет перечисление в целом, а не каждый элемент перечисления (т.е., каждое наименование). Выражение «по меньшей мере один из» допускает значение, включающее по меньшей мере одно из любого одного из наименований и/или по меньшей мере одно из любой комбинации наименований и/или по меньшей мере одно из каждого из наименований. Для примера: каждое из выражений «по меньшей мере один из A, B и C» или «по меньшей мере один из A, B или C» относится только к A, только к B или только к C; любой комбинации A, B и C; и/или по меньшей мере к одному из A, B и C.
[0062] Термины направления, например, над, под, верхний, нижний, по направлению вверх, по направлению вниз, влево, вправо, вверх по стволу скважины, вниз по стволу скважины и т.п., применены в отношении иллюстративных вариантов осуществления в соответствии с их изображением на фигурах, причем направление вверх является направлением к верхней части соответствующей фигуры, а направление вниз является направлением к нижней части соответствующей фигуры, направление вверх по стволу скважины представляет собой направление к поверхности скважины, а направление вниз по стволу скважины представляет собой направление к забою скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОРНЫЙ ТУРБОБУР | 1999 |
|
RU2161236C1 |
| РЕДУКТОРНЫЙ ТУРБОБУР | 1996 |
|
RU2112856C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2652519C1 |
| РОТОРНАЯ УПРАВЛЯЕМАЯ СИСТЕМА С ЭЛЕКТРОПРИВОДОМ ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДОЛОТА | 2017 |
|
RU2690238C1 |
| ДВУХРОТОРНЫЙ ТУРБОБУР | 2006 |
|
RU2326227C2 |
| Устройство для образования скважин для буронабивных свай | 1989 |
|
SU1694843A1 |
| БУРОВОЙ СНАРЯД ДЛЯ СКВАЖИНЫ (ВАРИАНТЫ) И ОПОРНЫЙ МЕХАНИЗМ И ТУРБИННАЯ СИЛОВАЯ УСТАНОВКА ДЛЯ БУРОВОГО СНАРЯДА | 2007 |
|
RU2405904C2 |
| Устройство для стабилизации забойных двигателей в скважине | 1989 |
|
SU1740602A1 |
| СТОПОРНАЯ МУФТА ДЛЯ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2471954C2 |
| УСТАНОВКА ДЛЯ ИСКЛЮЧЕНИЯ ЭФФЕКТИВНОГО КРУТЯЩЕГО МОМЕНТА БУРОВОГО ДОЛОТА И РЕГУЛИРОВАНИЯ ОТКЛОНЕНИЯ БУРОВОГО ДОЛОТА | 2007 |
|
RU2363844C1 |
Группа изобретений относится к области наклонно-направленного бурения. Узел управления направлением бурения содержит корпус, имеющий исполнительный привод, установленный в нем и приводимый в действие для вращения приводного вала. Планетарный редуктор установлен в корпусе и содержит зубчатый венец, функционально связанный с корпусом, центральную шестерню, соединенную с приводным валом, и водило планетарной передачи. Механическое соединение функционально связывает зубчатый венец с корпусом таким образом, что при вращении корпуса происходит вращение зубчатого венца. Механическое соединение выбирают, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом. Отклоняющий шпиндель присоединен к одному из: центральной шестерне или водилу планетарной передачи таким образом, что вращение одного из: центральной шестерни или водила планетарной передачи вызывает соответствующее вращение отклоняющего шпинделя, при этом отклоняющий шпиндель выполнен с возможностью независимого вращения относительно корпуса. Обеспечивается уменьшение воздействия прихвата-проскальзывания на инструмент. 3 н. и 18 з.п. ф-лы, 6 ил.
1. Узел управления направлением бурения, содержащий:
корпус, имеющий исполнительный привод, установленный в нем и приводимый в действие для вращения приводного вала;
планетарный редуктор, установленный внутри корпуса и содержащий зубчатый венец, функционально связанный с корпусом, одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу, и один или более сателлитов, выполненных с возможностью вращения вокруг центральной шестерни;
механическое соединение, функционально связывающее зубчатый венец с корпусом таким образом, что при вращении корпуса происходит вращение зубчатого венца, при этом механическое соединение выбирают, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом; и
отклоняющий шпиндель, присоединенный к одному из: центральной шестерне или водилу планетарной передачи таким образом, что вращение одного из: центральной шестерни или водила планетарной передачи вызывает соответствующее вращение отклоняющего шпинделя, при этом отклоняющий шпиндель выполнен с возможностью независимого вращения относительно корпуса.
2. Узел управления направлением бурения по п. 1, отличающийся тем, что зубчатый венец соединен непосредственно с корпусом посредством механического соединения.
3. Узел управления направлением бурения по п. 1, в котором планетарный редуктор дополнительно содержит каркас редуктора, который установлен между корпусом и зубчатым венцом, и при этом зубчатый венец косвенно соединен с корпусом посредством механического соединения и каркаса редуктора.
4. Узел управления направлением бурения по п. 1, отличающийся тем, что механическое соединение содержит сцепление, выбранное из группы, содержащей: резьбовое соединение, магнитное соединение, сварное соединение, паяное соединение, механически прикрепленное соединение, адгезионное соединение, пневматический упругий элемент, звездообразное соединение и любую их комбинацию.
5. Узел управления направлением бурения по п. 1, отличающийся тем, что один или более механических параметров являются параметрами, выбранными из группы, состоящей из: константы пружины кручения (k), коэффициента затухания (c) и момента инерции (J).
6. Узел управления направлением бурения по п. 1, отличающийся тем, что один или более механических параметров оптимизированы для применения в скважине для уменьшения возмущения от прихвата-проскальзывания.
7. Узел управления направлением бурения по п. 1, дополнительно содержащий:
один или более датчиков, установленных вблизи отклоняющего шпинделя; и
контроллер, коммуникативно соединенный с одним или более датчиками, при этом контроллер принимает результаты измерений, сделанные одним или более датчиками, и выдает управляющий сигнал, который вызывает изменение частоты вращения приводного вала.
8. Узел управления направлением бурения по п. 1, отличающийся тем, что контроллер представляет собой ПИД-контроллер (пропорционально-интегрально-дифференциальный контроллер).
9. Узел управления направлением бурения по п. 1, отличающийся тем, что исполнительный привод является выбранным из группы, содержащей: управляемый флюидом приводной механизм, турбину, забойный двигатель, электрический двигатель и любую их комбинацию.
10. Способ, включающий:
ввод узла управления направлением бурения в скважину на бурильной колонне, причем узел управления направлением бурения содержит корпус, имеющий исполнительный привод и планетарный редуктор, установленный внутри корпуса, причем планетарный редуктор содержит зубчатый венец, функционально связанный с корпусом, и одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу исполнительного привода;
вращение бурильной колонны в первом направлении и, таким образом, вращение корпуса и зубчатого венца в первом направлении;
приведение в действие исполнительного привода для вращения приводного вала и отклоняющего шпинделя, присоединенного к одному из: центральной шестерне или водилу планетарной передачи, во втором направлении, противоположном первому направлению; и
уменьшение возмущения от прихвата-проскальзывания, передающегося между корпусом и зубчатым венцом к отклоняющему шпинделю посредством механического соединения, которое функционально связывает зубчатый венец с корпусом, при этом механическое соединение выбирают, основываясь на способности одного или более механических параметров механического соединения уменьшать возмущение от прихвата-проскальзывания.
11. Способ по п. 10, отличающийся тем, что приведение в действие исполнительного привода включает поддержание отклоняющего шпинделя геостационарно по отношению к окружающему пласту.
12. Способ по п. 10, дополнительно включающий манипулирование одним или более механическими параметрами механического соединения для уменьшения возмущения от прихвата-проскальзывания, причем один или более механических параметров являются параметрами, выбранными из группы, содержащей: константу пружины кручения (k), коэффициент затухания (c) и момент инерции (J).
13. Способ по п. 12, отличающийся тем, что манипулирование одним или более механическими параметрами механического соединения включает изменение типа механического соединения на более гибкое механическое соединение.
14. Способ по п. 12, отличающийся тем, что манипулирование одним или более механическими параметрами механического соединения включает изменение материала по меньшей мере одного из корпуса или зубчатого венца.
15. Способ по п. 12, отличающийся тем, что манипулирование одним или более механическими параметрами механического соединения включает добавление демпфирующего материала к механическому соединению.
16. Способ по п. 12, отличающийся тем, что манипулирование одним или более механическими параметрами механического соединения включает оптимизацию одного или более механических параметров для уменьшения возмущения от прихвата-проскальзывания.
17. Способ по п. 10, дополнительно включающий:
установку целевого значения измерений на контроллере;
получение по меньшей мере одного значения измерений посредством одного или более датчиков, установленных вблизи отклоняющего шпинделя и коммуникационно присоединенных к контроллеру;
получение по меньшей мере одного значения измерений посредством контроллера;
вычисление погрешности, основываясь на сравнении по меньшей мере одного значения измерений с целевым значением измерения; и
вывод управляющего сигнала от контроллера для изменения частоты вращения приводного вала, при этом управляющий сигнал основывается на погрешности.
18. Скважинная система, содержащая:
бурильную колонну, пролегающую в ствол скважины и имеющую буровое долото, присоединенное к концу бурильной колонны;
узел управления направлением бурения, расположенный в бурильной колонне и содержащий корпус, выполненный с возможностью вращения с бурильной колонной, имеющий исполнительный привод и планетарный редуктор, установленный внутри корпуса, причем планетарный редуктор содержит зубчатый венец, функционально связанный с корпусом, и одно из: центральную шестерню или водило планетарной передачи, присоединенное к приводному валу исполнительного привода;
механическое соединение, функционально связывающее зубчатый венец с корпусом таким образом, что при вращении корпуса происходит вращение зубчатого венца, при этом механическое соединение выбирают, основываясь на одном или более механических параметрах механического соединения и способности одного или более механических параметров уменьшать возмущение от прихвата-проскальзывания, передающееся между корпусом и зубчатым венцом; и
отклоняющий шпиндель, присоединенный к одному из: центральной шестерне или водилу планетарной передачи таким образом, что вращение одного из: центральной шестерни или водила планетарной передачи вызывает соответствующее вращение отклоняющего шпинделя, при этом отклоняющий шпиндель выполнен с возможностью независимого вращения относительно корпуса.
19. Скважинная система по п. 18, отличающаяся тем, что механическое соединение содержит сцепление, выбранное из группы, содержащей: резьбовое соединение, магнитное соединение, сварное соединение, паяное соединение, механически прикрепленное соединение, адгезионное соединение, пневматический упругий элемент, звездообразное соединение и любую их комбинацию.
20. Скважинная система по п. 18, отличающаяся тем, что один или более механических параметров являются параметрами, выбранными из группы, состоящей из: константы пружины кручения (k), коэффициента затухания (c) и момента инерции (J).
21. Скважинная система по п. 18, дополнительно содержащая:
один или более датчиков, установленных вблизи отклоняющего шпинделя; и
контроллер, коммуникативно соединенный с одним или более датчиками, при этом контроллер принимает результаты измерений, сделанные одним или более датчиками, и выдает управляющий сигнал, который вызывает изменение частоты вращения приводного вала.
| РЕДУКТОРНЫЙ ТУРБОБУР | 1996 |
|
RU2112856C1 |
| Сверлильная машина | 1987 |
|
SU1506101A1 |
| ГЕНЕРАТОР-МУЛЬТИПЛИКАТОР ДЛЯ ПИТАНИЯ ЗАБОЙНОЙ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ | 2002 |
|
RU2215139C1 |
| УПРАВЛЕНИЕ НАКЛОННО-НАПРАВЛЕННЫМ БУРЕНИЕМ С ИСПОЛЬЗОВАНИЕМ РЕГУЛИРУЕМОГО ВРАЩЕНИЯ ДОЛОТА | 2008 |
|
RU2442873C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ КОЛЕБАНИЙ ПРИЛИПАНИЯ-ПРОСКАЛЬЗЫВАНИЯ В БУРИЛЬНОЙ КОЛОННЕ | 2008 |
|
RU2478781C2 |
| US 5265682 A1, 30.11.1993 | |||
| US 6837315 B2, 04.01.2005. | |||

