Изобретение относится к судостроению, а именно к подвесным лодочным моторам, и может быть применено для использования на различных судах, предназначенных для эксплуатации с подвесными моторами.
Известны стационарные приводы, где валопровод заменен на угловую колонку, которая позволяет, путем поворота части колонки вокруг оси, перпендикулярной диаметральной плоскости судна, поднимать гребной винт из воды, тем самым уменьшая осадку, что дает эксплуатационные преимущества (Справочник по теории корабля. Том. 3. Управляемость водоизмещающих судов. Гидродинамика судов с динамическими принципами поддержания / Под ред. Я.И. Войткунского. - Л.: Судостроение, 1985, с. 262). Такие движители, однако, механически сложны, содержат два угловых редуктора, что существенно увеличивает стоимость устройства и снижает его надежность. Кроме того, данное устройство не позволяет изменять степень заглубления гребного винта, не изменяя при этом его угол наклона к вертикальной плоскости в приемлемых для обеспечения высокого КПД пределах.
Известен стационарный привод Арнесона (Катера и яхты №3 (255), 2015, с. 55), не содержащий угловых редукторов и позволяющий изменять степень заглубления гребного винта без существенного влияния на угол наклона к вертикальной плоскости, однако величина изменения степени заглубления небольшая (соизмерима с величиной диаметра гребного винта), чего в ряде случаев недостаточно. Привод Арнесона ориентирован на применение с частично погруженными суперкавитирующими гребными винтами и мало подходит для полностью погруженных гребных винтов из-за сопротивления валопровода и возникающего большого наклона линии вала к плоскости горизонта, что ограничивает его применение скоростными глиссирующими катерами с большой энерговооруженностью. Все стационарные приводы обладают тем недостатком, что существенно усложняют конструкцию катера и малопригодны для установки на небольшие лодки, особенно надувные.
Помимо стационарных известны подвесные лодочные моторы (подвесные приводы), в которых двигатель и гребной винт объединены в один агрегат, не требующие усложнения конструкции судна и подходящие для всех типов катеров (Справочник по малотоннажному судостроению. / Сост. Б.Г. Мордвинов. - Л.: Судостроение, 1987, с. 514). При этом существенно упрощается монтаж такого агрегата на катер или лодку - двигатель навешивается на транец, кроме того, подвесные приводы, как правило, устроены так, что позволяют осуществить поворот гребного винта вокруг вертикальной оси, при этом оказывается возможным управление судном по курсу. Также подвесные приводы дают возможность уменьшить осадку судна за счет поворота агрегата вокруг оси, перпендикулярной диаметральной плоскости судна, при этом агрегат откидывается от транца и гребной винт выходит из воды. Однако известные подвесные приводы не дают возможности регулировать степень заглубления гребного винта, что существенно ограничивает их возможности по применению частично погруженных гребных винтов, а также затрудняет их использование на судах с подводными крыльями, осадка которых меняется в больших пределах в зависимости от режима хода.
Известен подвесной привод, описанный в п. РФ №2043265, опубл. 10.09.1995, и рассматриваемый заявителем в качестве наиболее близкого аналога. Данный привод включает блок двигателя с Z-образной трансмиссией привода гребного винта и параллелограммный механизм подвески блока. Механизм подвески включает опорную плиту (стойку), верхние и нижние тяги в виде рычагов, пружины кручения и регулирующие упоры. Подвеска позволяет изменять вертикальное положение блока двигателя с гребным винтом за счет изменения геометрии параллелограммного механизма, при этом изменяется величина заглубления гребного винта. Вертикальное перемещение блока вверх ограничивается за счет деформации пружин, а перемещение вниз - за счет наличия регулирующих упоров, при этом отсутствует возможность зафиксировать блок в промежуточном положении. Движение блока вверх осуществляется при изменении геометрии параллелограммного механизма за счет энергии деформированных пружин подвески, движение блока вниз и удержание в его нижнем положении осуществляется за счет упора гребного винта, преодолевающего усилие деформированных пружин, первоначальное погружение гребного винта в воду (для создания упора) осуществляется судоводителем путем надавливания на блок двигателя вниз. При исчезновении упора, за счет наличия энергии в деформированных пружинах подвески, блок автоматически поднимается вверх, и винт выходит из воды. Для управления курсом блок с двигателем и гребным винтом крепится к параллелограммному механизму подвески с помощью вертикально расположенной шпильки, вокруг которой блок двигателя с гребным винтом может поворачиваться в горизонтальной плоскости, при этом повороты блока осуществляются за счет сил, прикладываемых судоводителем непосредственно к блоку двигателя с гребным винтом. Угол наклона гребного винта к вертикальной плоскости задан конструктивно за счет расположения центров крепежных отверстий на линии, находящейся под определенным углом к основанию опорной плиты подвески, и при равенстве этого угла углу наклона транца гребной винт оказывается расположенным в вертикальной плоскости.
Однако конструкция данного устройства не позволяет регулировать степень погружения гребного винта независимо от его упора в процессе движения, вследствие чего становится невозможным менять степень погружения в зависимости от скорости судна, что требуется для судна на подводных крыльях. Известный привод не имеет заднего хода, т.к. задний ход равнозначен потере упора нужного направления, кроме того, в процессе движения, при выполнении разворотов или на волнении возможна потеря упора из-за оголения гребного винта, что также приведет к автоматическому подъему мотора и срыву режима движения. Помимо этого данное устройство затрудняет применение дистанционного управления, т.к. требует присутствия на корме члена экипажа для первичного заглубления гребного винта в начале движения. Кроме этого в известном решении нет возможности изменять угол наклона гребного винта к вертикальной плоскости в процессе движения, что не позволяет оптимально наклонять гребной винт к вертикальной плоскости в зависимости от режима движения и центровки судна.
Задачей заявляемого изобретения является расширение ассортимента подвесных приводов, осуществляющих движение судна.
Технический результат заявляемого устройства - повышение КПД подвесного привода судна независимо от изменяющихся эксплуатационных факторов, таких как нагрузка судна, скорость движения и дифферент, за счет возможности дистанционной регулировки всех параметров гребного винта, включая наклон, степень заглубления, поворот в горизонтальной плоскости, шаг и частоту вращения, а также снижение последствий от столкновений с подводным препятствием.
Поставленная задача решается подвесным приводом судна, содержащим блок двигателя с трансмиссией, включающей редуктор двигателя и угловой редуктор привода гребного винта регулируемого шага, и параллелограммный механизм подвески, состоящий из тяг, выполненных упругими и закрепленных в стойках с возможностью поворота, и линейного исполнительного механизма, соединенного последовательно с нижними тягами подвески и поворотными механизмами регулировки положения гребного винта в вертикальной плоскости и горизонтальной плоскости.
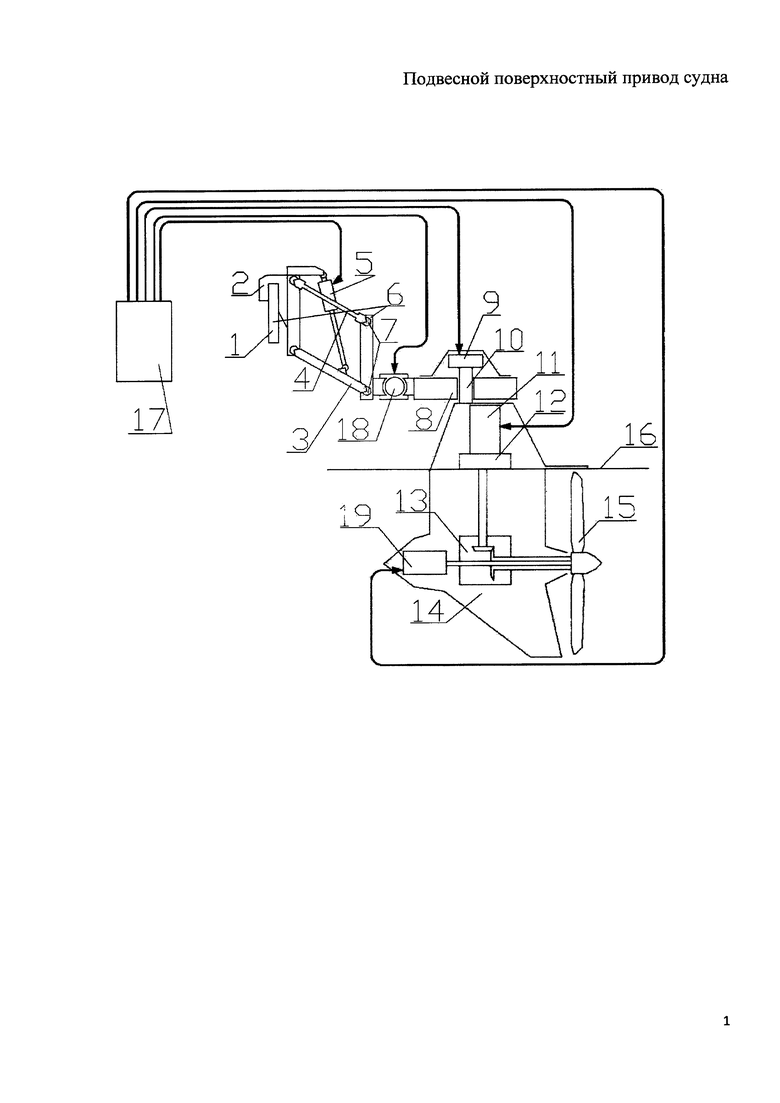
На чертеже приведена одна из возможных оптимальных схем заявляемого привода, где все механизмы заявляемого привода выполнены с использованием электродвигателей: 1 - транец катера, 2 - струбцина крепления привода, 3 - нижняя тяга параллелограммного механизма подвески, 4 - верхняя тяга механизма подвески, 5 - линейный исполнительный механизм, 6 - стойки крепления параллелограммного механизма подвески, 7 - подшипники тяг параллелограммного механизма подвески, 8 - плата поворотного механизма для поворота блока двигателя в горизонтальной плоскости, 9 - поворотный механизм для поворота блока двигателя в горизонтальной плоскости, 10 - вертикальный вал поворотного механизма для поворота блока двигателя в горизонтальной плоскости, 11 - электрический двигатель вращения гребного винта, 12 - редуктор двигателя вращения гребного винта, 13 - угловой редуктор двигателя вращения гребного винта, 14 - блок двигателя, 15 - гребной винт, 16 - уровень воды, 17 - электродистанционная система управления подвесным приводом, 18 - поворотный механизм регулирования наклона блока двигателя в вертикальной плоскости, 19 - линейный механизм регулирования шага гребного винта.
Работает устройство следующим образом. Гребной винт (15) приводится во вращение с помощью электродвигателя (11) через редуктор (12) и угловую передачу (13). При этом винт (15), электродвигатель (11), редуктор (12) и передача (13) размещаются в блоке (14). Такое решение позволяет использовать высокооборотные электродвигатели с целью снижения веса, вынести сам электродвигатель из воды, с целью снижения сопротивления, а нижняя часть блока (14) двигателя используется в качестве руля за счет возможности поворотов вокруг вертикальной оси. Для осуществления таких поворотов блок (14) крепится к нижней части вала (10), вращающегося в плате (8) поворотного механизма. Вращение осуществляется поворотным механизмом (9). Плата (8), в свою очередь, соединена с поворотным механизмом (18), позволяющим изменять наклон блока двигателя (14) и, соответственно, гребного винта (15) к вертикальной плоскости. И уже поворотный механизм (18) прикреплен к стойке (6), на которой собран параллелограммный механизм подвески. Параллелограммный механизм подвески состоит из упругих верхних (3) и нижних (4) тяг, поворачивающихся в подшипниках (7), установленных на стойках (6), и снабжается струбциной (2), служащей для навешивания привода на транец судна (1). При этом нижние тяги (3) соединены со штоком линейного механизма (5), степень выдвижения штока которого определяет геометрию параллелограммного механизма подвески и, в конечном счете, положение блока (14) и гребного винта (15) относительно уровня воды. Регулирование шага винта определяется степенью выдвижения штока линейного исполнительного механизма (19). Величиной выдвижения штока линейного механизма (5), углом поворота поворотного механизма (9), осуществляющего повороты блока (14) в горизонтальной плоскости, углом поворота механизма (18), осуществляющего повороты блока (14) в вертикальной плоскости, величиной выдвижения штока линейного механизма (19) регулирования шага винта и угловой скоростью вращения электродвигателя (11) управляют с помощью электродистанционной системы управления (17), для чего в устройстве предусмотрены соответствующие кабельные линии. Следует отметить, что при наличии силы упора гребного винта (15), направленной по ходу судна, в нижних тягах (3) параллелограммного механизма подвески возникают сжимающие усилия, а в верхних тягах (4) - растягивающие усилия. При этом сечения нижних тяг подбирают так, чтобы они выдерживали сжимающие усилия без заметных искажений формы, а сечения верхних тяг подбирают так, чтобы при аварийном столкновении корпуса (14) с подводным препятствием, когда на корпус начинает действовать сила, направленная против тяги гребного винта, возникающие в верхних тягах сжимающие усилия приводили к потере устойчивости формы верхних тяг (4). При этом геометрия параллелограммного механизма подвески искажается, корпус (14) поворачивается вокруг оси, перпендикулярной диаметральной плоскости судна, откидываясь назад и выходя из воды, за счет чего минимизируются последствия аварийного столкновения с подводным препятствием. Сечения верхних тяг (4) должны обеспечивать их устойчивость под действием сравнительно небольшого упора гребного винта (15) на заднем ходу. Кроме того, в отличие от прототипа, реверсирование тяги гребного винта на задний ход в заявляемом устройстве может осуществляться двумя способами:
а) реверсированием направления вращения двигателя (11) привода гребного винта или
б) за счет изменения шага винта, с помощью системы управления приводом (17).
Принцип работы устройства основан на возможности во время движения изменения всех параметров, определяющих режим работы подвесного привода, а именно: заглубление гребного винта, шаг гребного винта, наклон гребного винта к вертикальной плоскости, а также угол поворота гребного винта в горизонтальной плоскости и обороты двигателя, вращающего гребной винт. За счет этого достигается возможность установить оптимальные величины данных параметров, а также осуществлять управление курсом судна.
Необходимо отметить, что в настоящее время серийно выпускаются бесколлекторные электродвигатели постоянного тока с высоким значением удельной мощности, порядка 5 кВт/кг, и большим кпд (до 95% и выше в отдельных случаях), что делает применение электродвигателей для привода гребного винта более привлекательным, чем применение традиционных двигателей внутреннего сгорания (удельная мощность 1 кВт/кг и менее), даже несмотря на небольшую энергоемкость аккумуляторных батарей, существующих на данный момент. Помимо высокой удельной мощности электродвигатели обладают исключительно высокой надежностью и долговечностью, за счет отсутствия силовых сопряжений с трением при высоких температурах, малым уровнем шума, отсутствием каких бы то ни было вредных выбросов и наличием свойства реверсивности вращения.
Для приведения в действие линейных и поворотных механизмов кроме электрических, являющихся оптимальными, как приведено в примере, могут быть использованы и другие виды энергии, например энергия гидравлической жидкости или воздуха под давлением. При этом в случае использования энергии гидравлической жидкости в качестве поворотных механизмов могут быть использованы, например, поворотные гидродвигатели, а в качестве линейных исполнительных механизмов гидроцилиндры. Двигатель привода гребного винта также может быть как электрическим, что оптимально, так и другим, например бензиновым.
В случае применения электрической энергии для приведения в действие поворотных и линейных механизмов целесообразно использование электрических бесколлекторных двигателей.
Применение того или иного вида энергии определяется сочетанием конструктивных и экономических факторов, возникающих при проектировании подвесного привода заданной мощности. Следует отметить, что применение для всех приводов одного вида энергии сокращает номенклатуру используемых деталей, упрощает конструкцию и эксплуатацию, а также удешевляет производство.
Заявляемая конструкция подвесного поверхностного привода, за счет возможности произвольно изменять степень заглубления, позволяет эксплуатацию различных типов гребных винтов регулируемого шага, что существенно упрощает применение частично погруженных суперкавитирующих, с различными степенями заглубления гребных винтов, а также достигается возможность замены частично погруженного винта на полностью погруженный без каких-либо изменений конструкции судна и привода, что расширяет эксплуатационный диапазон заявляемой конструкции. Кроме этого появляется возможность полностью поднять гребной винт из воды, а также осуществлять движение с произвольно выбранной степенью заглубления винта, что придает судну важное эксплуатационное преимущество при движении в водоемах с малыми глубинами или при подходе к необорудованному берегу. Возможность изменять степень заглубления гребного винта произвольным образом независимо от силы упора в процессе движения является необходимой для эксплуатации на судах с подводными крыльями, а также для эксплуатации на судах с различной, в том числе нестандартной, высотой транца. Дополнительно при этом осуществляются возможности: а) менять наклон гребного винта к вертикальной плоскости для достижения оптимальных параметров движения, например поддерживать направление упора гребного винта строго горизонтально с целью повышения КПД, независимо от дифферента судна, который может меняться в зависимости от центровки и скорости движения, б) управлять курсом судна за счет поворотов привода вокруг вертикальной оси, причем все изменения конфигурации привода, включая величину заглубления гребного винта, угол наклона гребного винта к вертикальной плоскости, шаг гребного винта, а также поворот гребного винта относительно вертикальной оси, осуществляются дистанционно. Заявляемая конструкция привода предоставляет возможность управления работой привода судна дистанционно с размещением блока электродистанционной системы управления в произвольном месте судна, а отсутствие жестких механических связей с подвесным приводом упрощает монтаж привода на судне и повышает удобство эксплуатации.
Таким образом, предлагаемая конструкция подвесного привода судна позволяет решить поставленную задачу с достижением заявленного технического результата - повышение КПД привода за счет оптимизации параметров гребного винта в процессе работы, включая наклон, степень заглубления, поворот в горизонтальной плоскости, шаг и частоту вращения, а также позволяет снизить последствия от столкновений с подводным препятствием.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2778403C1 |
| Движительно-рулевой комплекс | 1987 |
|
SU1539140A1 |
| Подъёмник подвесного лодочного мотора | 2023 |
|
RU2822026C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 1996 |
|
RU2107642C1 |
| СПОСОБ ДВИЖЕНИЯ НА ВОДЕ И СКОРОСТНОЕ СУДНО ДЛЯ ДВИЖЕНИЯ НА ВОДЕ НА ВЕКТОРАХ УПОРОВ ВОДНЫХ ДВИЖИТЕЛЕЙ (ВАРИАНТЫ) | 2007 |
|
RU2364544C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ И СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ МОЩНОСТИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ КОРМОВОГО МЕХАНИЗМА КОРРЕКЦИИ ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ СУДНА | 2003 |
|
RU2262462C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ И СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ МОЩНОСТИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ КОРМОВОГО МЕХАНИЗМА КОРРЕКЦИИ ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ СУДНА | 2003 |
|
RU2262463C2 |
| УНИВЕРСАЛЬНЫЙ СУДОВОЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ЗАЩИЩЕННОСТИ | 2013 |
|
RU2523862C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
| V-ОБРАЗНО СПАРЕННЫЙ ШНЕКОВЫЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ (ВАРИАНТЫ) | 2015 |
|
RU2613472C1 |
Изобретение относится к судостроению и может быть применено для использования на различных судах, предназначенных для эксплуатации с подвесными моторами. Подвесной привод судна содержит блок двигателя с трансмиссией, которая включает редуктор двигателя и угловой редуктор привода гребного винта регулируемого шага и параллелограммный механизм подвески. Параллелограммный механизм подвески состоит из тяг, которые выполнены упругими и закреплены в стойках с возможностью поворота, и линейного исполнительного механизма, соединенного последовательно с нижними тягами подвески и поворотными механизмами регулировки положения гребного винта в вертикальной и горизонтальной плоскости. Достигается повышение КПД подвесного привода судна и снижение последствий от столкновения с подводными препятствиями. 2 з.п. ф-лы, 1 ил.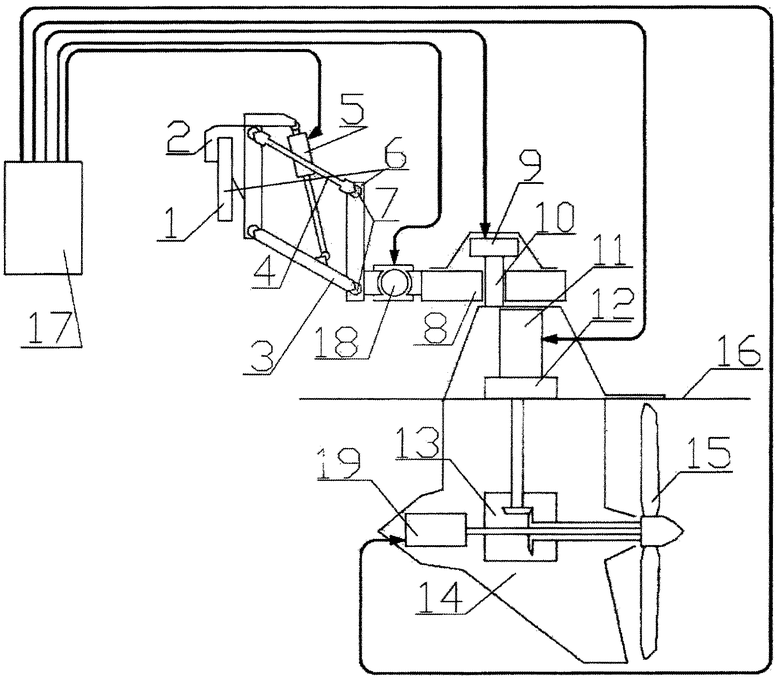
1. Подвесной привод судна, содержащий блок двигателя с трансмиссией, включающей редуктор двигателя и угловой редуктор привода гребного винта регулируемого шага, параллелограммный механизм подвески, состоящий из тяг, выполненных упругими и закрепленных в стойках с возможностью поворота, и линейного исполнительного механизма, соединенного последовательно с нижними тягами подвески и поворотными механизмами регулировки положения гребного винта в вертикальной и горизонтальной плоскости.
2. Подвесной привод судна по п.1, отличающийся тем, что двигатель привода гребного винта выполнен электрическим.
3. Подвесной привод судна по п.2, отличающийся тем, что в линейный исполнительный механизм и в поворотные механизмы регулировки положения гребного винта в вертикальной плоскости и горизонтальной плоскости установлены электромоторы.
| АВТОМАТИЧЕСКАЯ ПОДВЕСКА ПОДВЕСНОГО ЛОДОЧНОГО МОТОРА | 1992 |
|
RU2043265C1 |
| Движительно-рулевой комплекс | 1987 |
|
SU1539140A1 |
| US 5647780 A, 15.07.1997 | |||
| ЭЛЕКТРОСТАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЭМИССИИ ИОНИЗИРОВАННОГО ВОЗДУХА | 2001 |
|
RU2265485C2 |

