Изобретение относится к транспортным средствам, а именно к амфибийным аппаратам различного назначения, в частности для проведения океанологических экспериментальных работ, например гидроакустических экспериментов с использованием кабельных донных станций.
Проведение гидроакустических экспериментов в натурных условиях часто связано с измерениями акустических полей в заданных точках на различных акваториях, что часто исключает использование стационарных измерительных систем. Перемещаемые измерительные системы в таких случаях почти всегда размещаются на акваториях с помощью судов, которые осуществляют функции как доставки измерительной системы к месту работы, так и обеспечения работы измерительной системы в процессе проведения эксперимента. При этом персонал, осуществляющий обслуживание измерительной системы также размещается на судне и фактически входит в состав экипажа судна на время проведения работ. Необходимость длительного пребывания в районе проведения работ, с учетом погодных обстоятельств, заставляет использовать суда, оснащенные штатным экипажем из нескольких человек, соответствующего тоннажа, обеспечивающего обитаемость такого экипажа и двигателем необходимой мощности, обуславливающим значительный путевой расход топлива. В итоге, для размещения на акватории измерительной системы массой в несколько кг необходимо использовать судно с постоянным экипажем соответствующего тоннажа, что не может быть признано рациональным. Измерительные системы, предназначенные для работ в условиях мелководья, изготовленные с применением современных технических решений, хотя и имеют малую массу и габариты, однако это не сказывается на размерах обеспечивающего судна и стоимости его эксплуатации.
Более приемлемым вариантом для проведения работ с малогабаритными измерительными системами следует признать малотоннажный катер, используемый для постановочных работ, при этом длительные (несколько дней) измерения можно проводить, если осуществляется либо автономная регистрация данных непосредственно в измерительной системе, либо, что предпочтительнее, организуется береговой пост с выводом получаемой информации по кабелю от измерительной системы до берегового поста. При таком варианте организации работ существенно снижается стоимость проведения эксперимента, однако остается проблема транспортировки малотоннажного катера, требуется трейлер и появляются требования к характеру береговой полосы в районе проведения работ, обеспечивающие швартовку катера к берегу и организацию его хранения на время проведения работ.
С целью дальнейшего снижения стоимости работ, уменьшения численности задействованного персонала, уменьшения трудоемкости работ по обеспечению эксперимента и расширения списка акваторий, доступных для проведения экспериментов, предлагаются амфибийные транспортные средства (амфибийный аппарат), используемые как для достижения района проведения экспериментальных работ, так и для установки измерительной системы в нужной точке акватории, с последующим расположением на берегу в качестве берегового поста.
Известны различные амфибийные аппараты (https://carakoom.com/blog/6-samyh-neobychnyh-avtomobilej-amfibij-kotorye-mogut-pohvastatsya-vysokimi-skorostyami). Большинство имеют герметичный корпус, обеспечивающий плавучесть, и колеса предназначенные для движения по воде и одновременно передвижения по суше, гребные винты, а также водометные движители. При этом для привода колес, гребных винтов и водометных движителей, как правило, используется один и тот же силовой агрегат, соединяемый с колесами, гребными винтами и водометным движителем трансмиссией, включающей валы и редукторы. Следует отметить, что использование колес, обеспечивающих передвижение по суше, для перемещения по воде отличается низкой эффективностью, позволяющей развивать скорость перемещения по воде на уровне 3-5 км/ч, например, вездеход ТРЭКОЛ 39041 имеет скорость на воде 3 км/ч (https://www.trecol.ru/). Применение гребных винтов и водометных движителей, имеющих более высокую эффективность, позволяет достичь скорости по воде на уровне до 10 км/ч, при этом движение осуществляется в водоизмещающем режиме, а колеса, находящиеся в потоке воды, создают большое дополнительное сопротивление - так, вышеупомянутый вездеход ТРЭКОЛ 39041, при установке подвесного мотора развивает скорость 10 км/ч.
Известны амфибийные транспортные средства, колеса которых оснащены механизмами, убирающими колеса в ниши, выполненные на корпусе, корпус при этом имеет удобообтекаемую форму, обеспечивающую движение в глиссирующем режиме, например, патент РФ №2520665, транспортное средство которого содержит глиссирующий корпус, три втягиваемых при движении по воде колеса и два гребных винта. Аналогичные данному решения позволяют достигать скоростей порядка 50-60 км/ч. Однако механизмы уборки колес в ниши усложняют конструкцию, увеличивая ее стоимость и массу, а движение в режиме глиссирования, отличающееся низкими значениями гидродинамического качества, требует установки двигателя высокой мощности, что еще более увеличивает массу и стоимость конструкции, вызывая, кроме того, повышенный расход топлива при движении по воде.
Известно амфибийное транспортное средство, https://www.rinspeed.eu/en/Splash_33_concept-car.html#mehrlesen, содержащее загерметезированный корпус, обеспечивающий плавучесть при нахождении в воде, двигатель внутреннего сгорания, жестко закрепленные колеса для движения по суше, приводимые во вращение двигателем, и разворачивающиеся (выпускающиеся) при движении по воде подводные крылья, присоединенные к корпусу. Движение по воде обеспечивается 3-лопастным гребным винтом на выдвижной поворотной угловой колонке (Z - привод), также обеспечивающей управление по курсу, сообразно сигналам, передаваемым с рулевого колеса в кабине водителя. При движении по суше поворотная колонка убирается внутрь корпуса, а степень ее выдвижения может быть выбрана любой, что обеспечивает возможность работы гребного винта при сходе с берега в воду и на малой глубине. Подводные крылья складываются и разворачиваются с помощью гидравлической системы. Гребной винт поворотной колонки и колеса приводится во вращение общим двигателем, за счет наличия управляемой по сигналам водителя раздаточной коробки. Указывается, что для защиты корпуса от проникновения воды применяются резиновые сильфонные уплотнения, обеспечивая работу трансмиссии, подвески, рулевого управления и поворотной колонки, также в корпусе имеются откачивающие насосы на случай потери герметичности.
Данное амфибийное транспортное средство (аппарат) является наиболее близким к заявляемому.
Следует отметить, что разгон данного аппарата до скорости выхода на режим движения на крыльях требует применения двигателя повышенной мощности из-за сопротивления, создаваемого находящимися в воде колесами, которые никак не способствуют продвижению аппарата в режиме плавания. Использование одного и того же двигателя для привода и колес и гребного винта требует применения сложной механической трансмиссии, а необходимость передавать движения рулевого колеса на управляющие колеса и поворотную колонку усложняет систему управления движением. Применение гидравлической системы для развертывания и складывания подводных крыльев, а также наличие механизма убирания в корпус поворотной колонки еще более усложняет конструкцию. В режиме движения на воде снижается надежность аппарата из-за наличия в корпусе аппарата отверстий для установки трансмиссионных валов, приводящих во вращение колеса.
Таким образом, существует проблема разработки амфибийного аппарата для проведения работ с малогабаритными, в том числе измерительными системами.
Проблема решается предлагаемым амфибийным транспортным средством, содержащем корпус, источник энергии, систему управления движением и прикрепленные к корпусу посредством подвески колеса, каждое из которых включает обод и неподвижную втулку с полостью, в которой размещено, установленное с возможностью вращения на закрепленной на краях полости оси выдвижное подводное крыло, снабженное гребным электроприводом с датчиком угловой скорости, при этом крыло шарнирно соединено с линейным электроприводом, один конец которого закреплен на крыле, а другой - на втулке, снабженной датчиком угловой скорости обода колеса, подвески колеса, шарнирно прикреплены к корпусу и к неподвижной втулке, на которой установлены(закреплены) стойки, на которые опирается обод колеса, внутренняя поверхность которого содержит венец с внутренними зубьями, соединенный с закрепленным на неподвижной втулке приводом вращения обода, состоящим из электромотора с редуктором, выходной вал которого снабжен шестерней, при этом управление электромоторами приводов выполнено на базе закрепленного на втулке электронного блока, через электрические кабели соединенного с датчиками угловой скорости обода колеса, датчика угловой скорости электромотора гребного электропривода и датчика угла поворота подводного крыла вокруг оси, а управление движением амфибийным средством осуществляется системой управления, размещенной в корпусе.
Техническим результатом предложенного конструкторского решения является снижение мощности гребных приводов, необходимой для выхода аппарата на крыльевой режим, улучшение поведения аппарата на волнении, повышение проходимости при движении по суше, увеличения мореходности, улучшении маневренных характеристик как на суше, так и на воде и повышение надежности эксплуатации.
Схематические изображения заявляемого аппарата и этапы работы представлены на следующих рисунках.
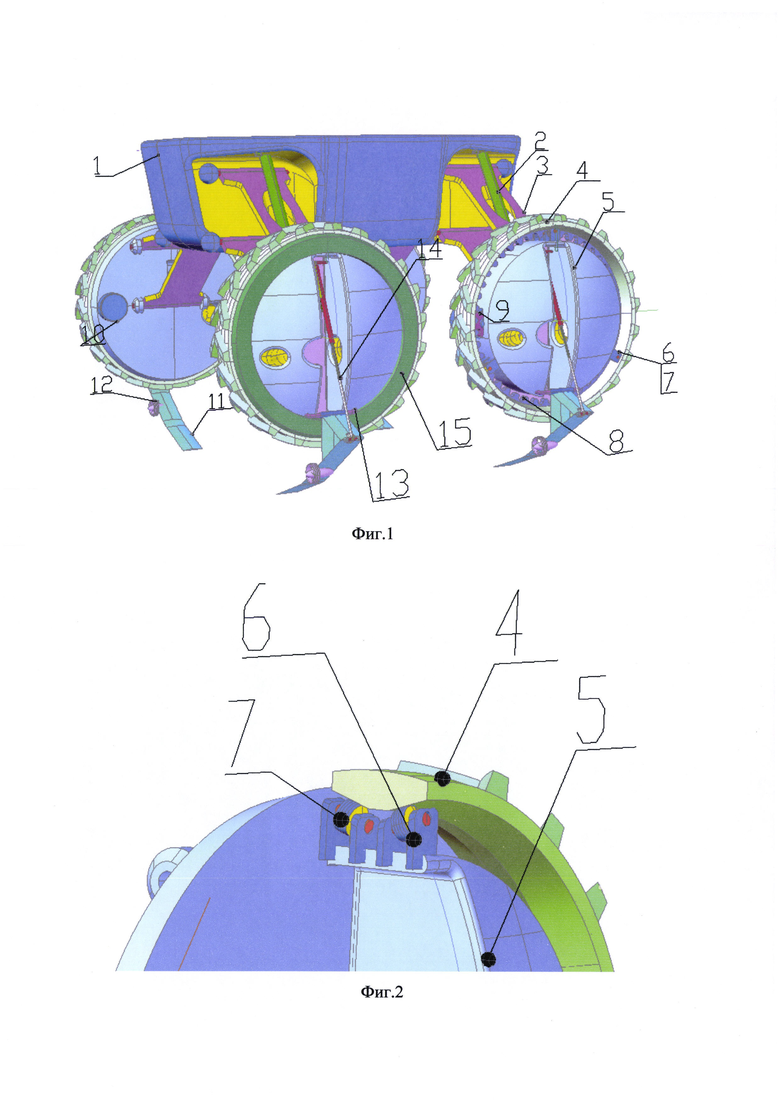
Фиг. 1. Схема амфибийного аппарата. Подводные крылья выпущены. Цифрами обозначено: 1 - корпус; 2 - амортизатор подвески колеса; 3 - тяга подвески колеса; 4 - обод; 5 - неподвижная втулка; 6, - стойки с осями и 7 -ролики; 8 - зубчатый венец обода; 9 - зубчатая шестерня; 10 - привод вращения обода; 11 - подводное крыло в выпущенном положении; 12 - гребной электропривод; 13 - ось вращения подводного крыла; 14 - линейный электропривод выпускания крыла; 15 - грязезащитный уплотняющий диск
На Фиг. 2. Схема расположения обода 4 на втулке 5 колеса, Зубчатый венец обода условно не показан.
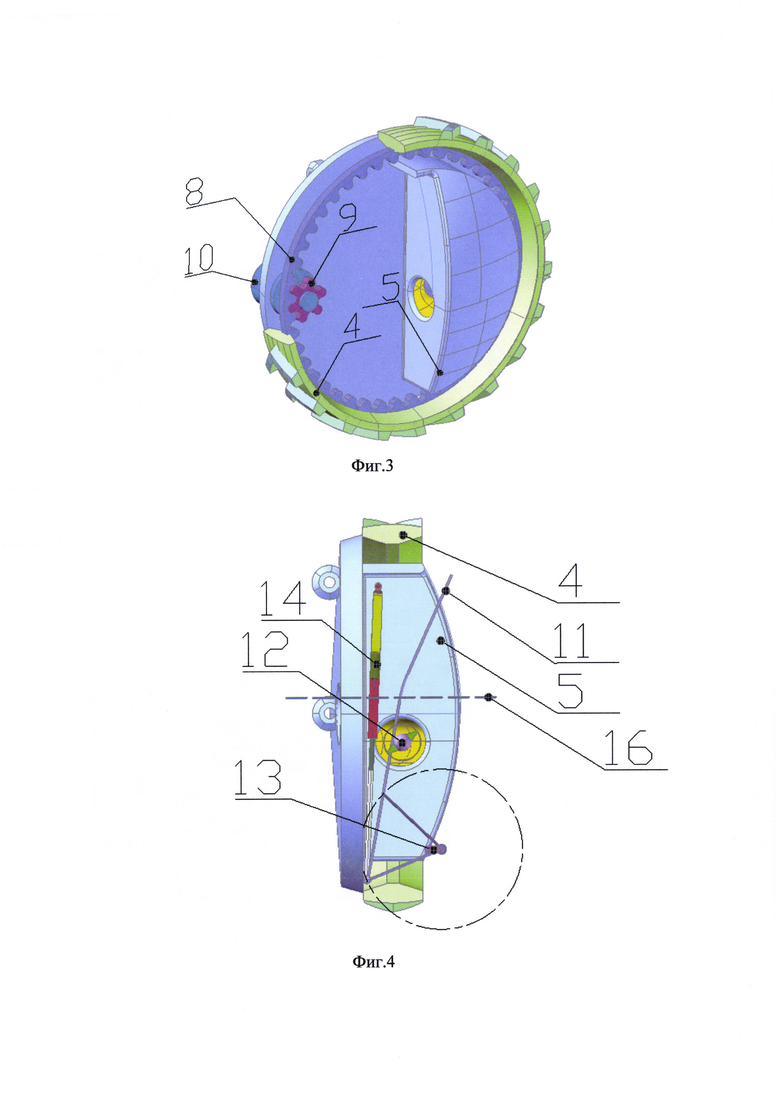
Фиг. 3. Схема размещения зубчатых венцов вращательного привода обода. Ролики условно не показаны.
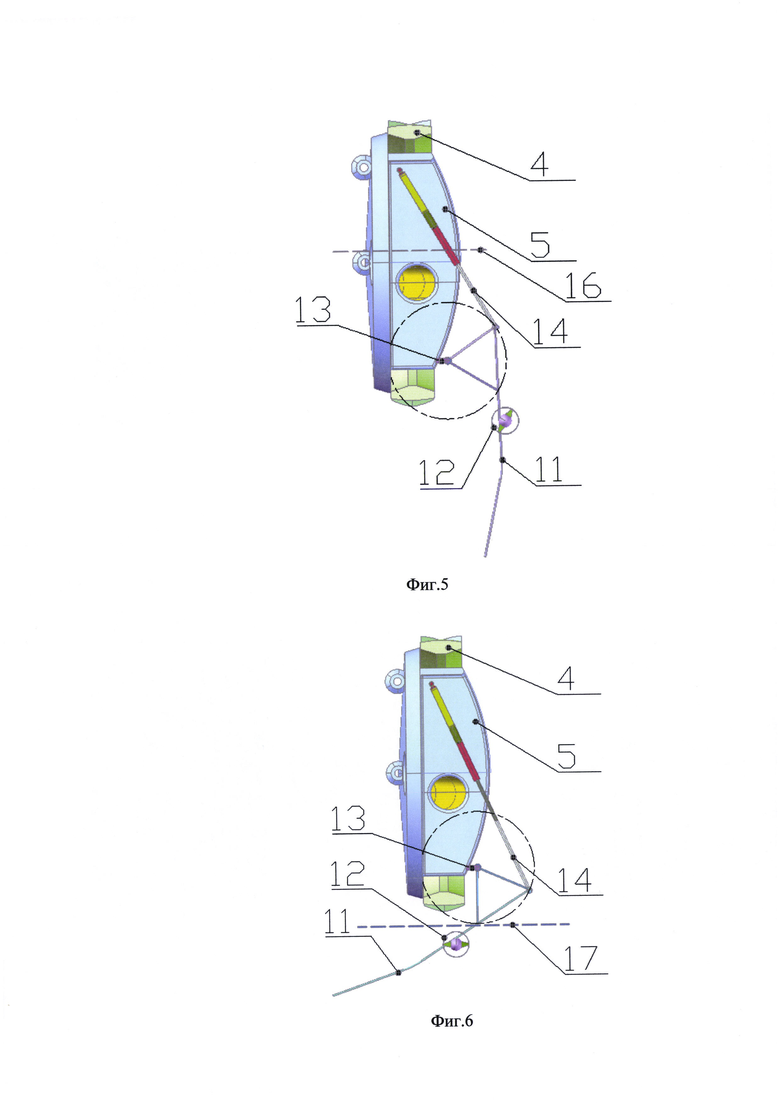
На фиг. 4, 5 и 6 показано подводное крыло 11 в различных положениях.
Фиг. 4. Схема размещения крыла в полости втулки. Зубчатый венец обода условно не показан. Крыло 11 в сложенном положении. 16 - положение ватерлинии в водоизмещающем режиме плавания
Фиг. 5. Схема размещения крыла в полости втулки. Зубчатый венец обода условно не показан. Крыло в промежуточном положении.
Фиг. 6. Схема размещения крыла в полости втулки. Зубчатый венец обода условно не показан. Крыло в выдвинутом положении. 17 - положение ватерлинии в режиме хода на крыльях.
Заявляемое устройство представляет собой аппарат/амфибийное транспортное средство/платформу, на которой могут быть реализованы транспортные средства для решения различных задач. При этом управление осуществляется либо экипажем с помощью системы управления движением, если он размещен в корпусе, либо по сигналам автоматической системы управления аппаратом, размещаемой в корпусе, если аппарат предназначен для работы в автоматическом режиме.
Движение аппарата по суше осуществляется с помощью колес, состоящих из неподвижных втулок 5 и ободьев 4. Ободья 4, для увеличения проходимости по грунту, могут быть оснащены грунтозацепами. Движение аппарата по воде может осуществляться в двух режимах, а именно: плавание в водоизмещающем режиме, в том числе и с нулевой поступательной скоростью, и движение в режиме хода на подводных крыльях 11. Во время движения по суше подводные крылья 11 находятся в убранном положении, размещаясь в полостях втулок 5 колес. Плавание в водоизмещающем режиме также может осуществляться, когда крылья 11 находятся в убранном положении. При движении в режиме хода на подводных крыльях, крылья 11 должны быть выдвинуты. При движении по воде, в водоизмещающем режиме, плавучесть аппарата обеспечивается архимедовой силой, возникающей на частично погруженных в воду втулках 5 и ободьях 4. При этом корпус 1 не погружен в воду, а объемы неподвижных втулок 5 и ободьев 4 подобраны так, чтобы, при убранных крыльях 11, гребные электроприводы 12 были полностью погруженными в воду, положение ватерлинии 16 в водоизмещающем режиме показано на Фиг. 4, 5. При движении по воде, в режиме движения на крыльях, размеры крыльев, углы их установки и расположение гребных электроприводов 12 согласовывают так, чтобы уровень ходовой ватерлинии 17 (Фиг. 6) обеспечивал полное погружение гребных электроприводов 12 в воду. Энергия, необходимая для работы электромоторов приводов вращения ободьев 10, электромоторов гребных электроприводов 12, электромоторов линейных электроприводов 14, а также для обеспечения работы электронных блоков управления электромоторами поступает по кабелям из корпуса 1, где размещен ее источник энергии, например, аккумуляторные батареи. Сигналы для обеспечения работы электронных блоков управления порождаются системой управления движением, размещенной в корпусе 1 и связанной с электронными блоками управления электромоторами кабелями. Система управления аппаратом, размещаемая в корпусе 1, блоки управления электромоторами приводов вращения ободьев 10, гребных электроприводов 12, линейных электроприводов 14, кабели питания и сигнальные кабели на фигурах не показаны.
К корпусу 1 прикреплены, посредством системы подвески, четыре колеса, каждое из которых состоит из обода 4 и неподвижной втулки 5. Система подвески может представлять собой, например, параллелограммный механизм, состоящий из тяг 3, прикрепленных одной стороной к корпусу 1 с помощью шарниров, а другой стороной, с помощью шарниров, прикрепленных к неподвижной втулке 5. Для передачи на корпус вертикальных сил и амортизации вертикальных перемещений колес при движении по неровностям поверхности служат амортизаторы 2, прикрепленные одним концом посредством шарнира к корпусу 1, а другим концом, с помощью шарнира, к неподвижной втулке 5. Амортизатор может представлять собой, например, пневмоцилиндр, корпус которого крепится к корпусу 1, а подвижный шток крепится к втулке 5, при этом упругость обеспечивается за счет сжимаемости воздуха, находящегося в корпусе пневмоцилиндра под поршнем, соединенным со штоком.
Движение аппарата по поверхности земли осуществляется за счет вращения ободьев 4 вокруг неподвижных втулок 5 колес. Для обеспечения возможности вращения ободьев последние удерживаются на втулках 5 посредством роликов 7, вращающихся на осях, закрепленных на стойках 6, прикрепленных к втулкам 5. Обод 4 выполнен с двумя внутренними коническими поверхностями, как показано на Фиг. 2, на которые опираются ролики, обеспечивая передачу вертикальных, горизонтальных и боковых сил с обода 4 на неподвижную втулку 5. Каждое колесо содержит три пары роликов, обеспечивающих необходимые кинематические связи и одну вращательную подвижность обода 4. На внутренней поверхности каждого из ободьев 4 закреплен зубчатый венец 8 с внутренними зубьями, входящими в зацепление с зубчатой шестерней 9 (Фиг. 3). Зубчатая шестерня 9 прикреплена к выходному валу редуктора привода 10 вращения обода, приводимому во вращение электромотором, расположенном внутри корпуса привода вращения обода 10. Корпус привода 10 вращения обода прикреплен к неподвижной втулке 5, а в теле втулки 5 имеется полость необходимой формы и объема для размещения корпуса привода 10 и шестерни 9. Управление аппаратом при движении по суше осуществляется за счет управления угловой скоростью вращения электромоторов приводов 10 с помощью электронных блоков, управляющих протекающим через электромоторы приводов вращения обода 10 током. При этом сигналы для электронных блоков генерируются либо экипажем (в случае его наличия) либо автоматической системой управления движением, размещенной в корпусе 1. Для торможения колес приводы 10 оснащены, как правило, тормозной системой, например, фрикционным электромагнитным тормозом. Также торможение может осуществляться за счет переключения электромоторов приводов вращения обода 10 в режим противовращения. Следует отметить, что, за счет переключения направления вращения электромоторов приводов 10 всех колес, достигается движение задним ходом. Переключение направления вращения электромоторов приводов 10 на задний ход, расположенных на одном борту, при сохранении направления вращения электромоторов приводов 10, расположенных по другому борту, на передний ход, позволяет осуществлять разворот на месте. Уменьшение угловой скорости вращения электромоторов приводов 10, расположенных по одному борту, относительно угловой скорости вращения электромоторов приводов 10, расположенных по другому борту, позволяет осуществлять повороты при движении с поступательной скоростью.
Работа устройства при движении по воде.
Движение по воде аппарата осуществляется в двух режимах: водоизмещающем режиме и режиме движения на подводных крыльях. Для движения на подводных крыльях аппарат оснащен выдвижными подводными крыльями 11, которые при движении по суше (Фиг. 4) убираются с помощью раздвижных линейных электроприводов 14, прикрепленных одним концом с помощью шарнира к неподвижной втулке 5, а другим концом, а именно выдвижным штоком, к крылу 11. Неподвижная втулка 5 имеет полость, в которую, в убранном положении, помещается подводное крыло 11 с закрепленным на крыле гребным электроприводом 12. Объемы втулки 5 и ободьев выполняются такими, чтобы при заданном водоизмещении аппарата ватерлиния 16 в водоизмещающем режиме (Фиг. 4), проходила выше гребных электроприводов 12 при сложенных крыльях 11.. Для движения в режиме на крыльях, после вхождения в воду, аппарат должен отойти от берега в водоизмещающем режиме, с тем, чтобы достичь глубины, при которой крылья могут быть повернуты в необходимое для реализации режима движения на крыльях положение. Движение в водоизмещающем режиме может осуществляться как с помощью вращающихся колес, а в случае присутствия грунтозацепов, обод колеса захватывает воду и отбрасывают ее назад по ходу движения, так и с помощью гребных электроприводов 12, размещенных на крыльях 11. Для обеспечения работы гребных электроприводов 12 при сложенных крыльях 11 втулки 5 имеют каналы, обеспечивающие протекание воды, отбрасываемой гребными электроприводами 12. Управление движением в режиме плавания, как в водоизмещающем режиме, так и в режиме движения на крыльях, осуществляется аналогично управлению движением по суше, за счет изменения угловой скорости вращения электромоторов гребных электроприводов 12, расположенных по одному борту, по отношению к угловой скорости электромоторов гребных электроприводов 12 другого борта, как по величине, так и по знаку. При этом достигается возможность разворотов на месте и поворотов при движении с поступательной скоростью, также обеспечивается движение задним ходом.
На фиг. 4, 5 и 6 показано подводное крыло в различных положениях: в убранном, в промежуточном и в выдвинутом положении. Крыло поворачивается вокруг оси 13, закрепленной на неподвижной втулке 5. Угол поворота крыла вокруг оси 13 определяется степенью выдвижения штока линейного электропривода 14 и измеряется датчиком угла поворота, закрепленном на втулке 5 (на фигурах не показан). Следует отметить, что в процессе выдвижения подводного крыла 11 из убранного (фиг. 4) в выдвинутое (фиг. 6) положение шток линейного электропривода 14 вначале втягивается внутрь, в промежуточном (фиг. 5) положении подводного крыла 11 длина линейного электропривода 14 достигает минимума, затем шток опять выдвигается и в выдвинутом положении подводного крыла 11 длина линейного электропривода достигает максимума. Таким образом, в процессе выдвижения, подводное крыло 11, поворачиваясь вокруг оси 13, проходит через мертвую точку, когда длина линейного электропривода 14 минимальна, это промежуточное положение показано на фиг. 5. Для прохождения мертвой точки в нужном направлении (имеется в виду, что подводное крыло может как выдвигаться, если оно было убрано, так и убираться, если оно было выдвинуто) применяется кратковременный пуск гребного электропривода 12, расположенного на подводном крыле 11. При этом направление вращения электромотора гребного электропривода 12 выбирается таким, чтобы направление реактивного момента, возникающего при вращении мотора гребного электропривода, вызывало на подводном крыле силу, доворачивающую подводное крыло 11 в нужную в данный момент сторону для прохождения мертвой точки. Момент включения гребного электропривода 12 определяется системой управления с помощью сигнала датчика угла поворота (на фигурах не показан) подводного крыла 11 вокруг оси 13, закрепленной на неподвижной втулке 5. Направление вращения электромотора гребного электропривода 12 определяется в зависимости от направления движения подводного крыла 11: из убранного положения в выдвинутое или наоборот. Следует отметить, что в зависимости от соотношения силы веса и архимедовой силы погруженного под воду подводного крыла, в одном из случаев (выдвижение или убирание) включать мотор гребного электропривода может и не понадобиться, при этом прохождение мертвой точки может быть обеспечено либо силой веса (в случае ее преобладания), либо архимедовой силой.
Конструктивно аппарат при выдвинутых крыльях представляет собой аппарат на килеватых подводных крыльях, пересекающих водную поверхность, положение ватерлинии 17 в режиме хода на крыльях (Фиг. 6). Такая схема обладает свойством саморегулирования степени заглубления крыльевой системы в зависимости от скорости и водоизмещения аппарата, и не требует системы управления подъемной силой подводных крыльев для обеспечения устойчивости движения: в момент случайного уменьшения заглубления крыльевой системы уменьшается погруженная площадь крыльев, снижается развиваемая подъемная сила, и заглубление увеличивается; в момент случайного увеличения заглубления крыльевой системы погруженная площадь крыльев увеличивается, подъемная сила увеличивается, аппарат всплывает, и восстанавливается исходное заглубление; при возникновении, например правого крена, заглубление крыльев на правом борту увеличивается, на левом борту уменьшается, соответственно возникает восстанавливающий момент, устраняющий крен. Аналогично устраняется и случайно возникающий дифферент.
Размещение приводов вращения ободьев колес непосредственно в колесах исключает трансмиссию, исключает устройство, обеспечивающее поворот передних колес с целью изменения направления движения, уменьшая номенклатуру применяемых деталей. Раздельное управление электроприводами колес с помощью системы управления позволяет реализовать различные алгоритмы управления, обеспечивающие, в том числе, разворот на месте, что увеличивает маневренность аппарата при движении по суше. Также отсутствует необходимость применения межосевых и межколесных дифференциалов, а также устройств для их отключения, применяемых, как правило, на автомобилях повышенной проходимости со всеми ведущими колесами.
Применение колес большого диаметра с целью размещения в полостях неподвижных втулок подводных крыльев в убранном положении увеличивает проходимость аппарата по суше за счет увеличенного клиренса и большого диаметра колес. Принятая система размещения крыльев, при движении по воде в крыльевом режиме, обеспечивает еще больший клиренс, чем при движении по суше, что обеспечивает повышение мореходности без применения стоек для крепления крыльев или увеличения размеров крыльевой системы. Кроме того, мореходность дополнительно увеличивается за счет того, что крылья размещены на колесах, а колеса установлены на корпусе с помощью системы подвески, обеспечивающей снижение передаваемых на корпус сил, возникающих на подводных крыльях при движении на волнении, снижая ускорения корпуса. Размещение на крыльях гребных электроприводов, исключает необходимость применения, как на прототипе, гребного привода с механизмами выдвигания, поворота для управления курсом и трансмиссии с раздаточной коробкой. Отсутствие в корпусе двигателя, трансмиссии, раздаточной коробки и поворотной угловой колонки увеличивает свободный объем корпуса для размещения полезной нагрузки и дополнительно уменьшает номенклатуру применяемых деталей. Исключение из конструкции гидросистемы упрощает эксплуатацию и снижает стоимость. При наличии на колесах грунтозацепов и большом заглубление колес при движении в водоизмещающем режиме возможно использование вращения колес как при движении в водоизмещающем режиме, так и в процессе выхода на крылья, что снижает нагрузку на гребные электроприводы, расширяет диапазон условий, при которых возможен выход на крылья и повышает надежность эксплуатации за счет возможности перемещения по воде даже в случае разрушения всех четырех гребных электроприводов, например, в случае посадки на мель. При движении на крыльях, ободьям колес может быть придано вращение, что уменьшает сопротивление аппарата при замывании колес на волнении. Четыре независимых привода для движения по суше, четыре независимых гребных привода для движения по воде повышают эксплуатационную надежность, допуская до двух отказов (по одному с каждого борта) приводов для движения по суше, и до двух отказов (по одному с каждого борта) гребных электроприводов, при этом сохраняются как возможность продолжать движение, так и характеристики маневренности.
В качестве электромоторов предполагается использование бесколлекторных электродвигателей, отличающихся малыми габаритами и большой мощностью. Зубчатый венец обода и шестерня привода должны быть изготовлены из синтетических материалов, допускающих работу без смазки, например, нейлона. В качестве материалов для изготовления корпуса, неподвижных втулок колес и ободьев возможно использование различных пластмасс, выпускаемых промышленностью, например, стеклопластиков, при этом втулки могут быть изготовлены, например, из пенопласта, оклеенного стеклопластиком, для получения необходимой плавучести при сохранении небольшой массы. В качестве источника энергии, как упоминалось выше, могут быть использованы аккумуляторы, а также солнечные батареи и/или электрогенератор, приводимый во вращение двигателем внутреннего сгорания. Необходимо отметить, что примененная система управления аппаратом позволяет осуществить различные варианты управления аппаратом - непосредственно экипажем, дистанционный или автоматический без изменения конструкции, в частности нет необходимости устанавливать сервоприводы в систему управления в случае автоматического или дистанционного управления.
Для защиты зубчатого зацепления венца 8 обода 4 с шестерней 9 привода вращения обода от пыли и грязи применены торцовые уплотнения, представляющие собой диски 15, закрепленные на втулках 5 и прилегающие к торцам вращающихся ободьев 4 - с наружной стороны колес; с внутренней стороны колес торцовые уплотнения, прилегающие к торцам вращающихся ободьев, образованы формой сечения неподвижной втулки 5. Следует отметить, что описанные торцовые уплотнения являются пыле-грязезащитными не предназначены для полной герметизации объема, где расположены зубчатые венцы, поэтому все электрические приводы, а именно привод вращения обода 10, гребной электропривод 12 и линейный электропривод 14 должны иметь уплотняющие устройства, установленные на вращающихся валах приводов и выдвижном штоке линейного электропривода, выполненные, например, в виде резиновых колец. При этом заявляемое устройство не имеет в корпусе 1 уплотняемых отверстий, расположенных ниже ватерлинии в водоизмещающем режиме 16 (Фиг. 4, 5), через которые проходят вращающиеся валы, что, в отличие от прототипа, повышает надежность эксплуатации при движении по воде, исключая возможность затопления корпуса 1 в случае отказа уплотнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Амфибийное транспортное средство высокой проходимости | 2019 |
|
RU2708798C1 |
| АМФИБИЙНОЕ СРЕДСТВО ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2732662C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2577504C1 |
| Колёсный амфибийный глиссер | 2019 |
|
RU2714624C1 |
| СПОСОБ СОЗДАНИЯ ВОЗДУШНОЙ РАЗГРУЗКИ И ТЯГИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ЭКРАНОЛЕТ С УСТРОЙСТВОМ СОЗДАНИЯ ВОЗДУШНОЙ РАЗГРУЗКИ И ТЯГИ | 1999 |
|
RU2139212C1 |
| Амфибийный колёсный движитель | 2019 |
|
RU2717390C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2245259C2 |
| Вездеходный транспортный робот | 2016 |
|
RU2615808C1 |
| ПАРОМ ДЛЯ ПЕРЕВОЗКИ ПЕРЕДНЕПРИВОДНОГО АВТОМОБИЛЯ | 2007 |
|
RU2350505C1 |
Изобретение относится к области машиностроения, в частности к амфибийным транспортным средствам. Амфибийное транспортное средство содержит корпус, источник энергии, систему управления движением транспортного средства, колеса. Колеса включают обод и неподвижную втулку с полостью. В полости размещено выдвижное подводное крыло. Крыло установлено с возможностью вращения на закрепленной на краях полости оси и снабжено гребным электроприводом с датчиком угловой скорости. Крыло шарнирно соединено с линейным электроприводом. Один конец линейного электропривода закреплен на крыле, а другой - на втулке. Втулка снабжена датчиком угловой скорости обода колеса. Элементы подвески колеса шарнирно прикреплены к корпусу и к неподвижной втулке. На неподвижной втулке закреплены стойки с осями, на которые опирается обод колеса. Внутренняя поверхность обода колеса содержит венец с внутренними зубьями. Венец соединен с закрепленным на неподвижной втулке приводом вращения обода. Приводы электромоторов присоединены к закрепленному на втулке электронному блоку. Электронный блок соединен с датчиками угловой скорости обода колеса, датчиком угловой скорости электромотора гребного электропривода и датчиком угла поворота подводного крыла вокруг оси. Достигается повышение надежности эксплуатации. 2 з.п. ф-лы, 6 ил.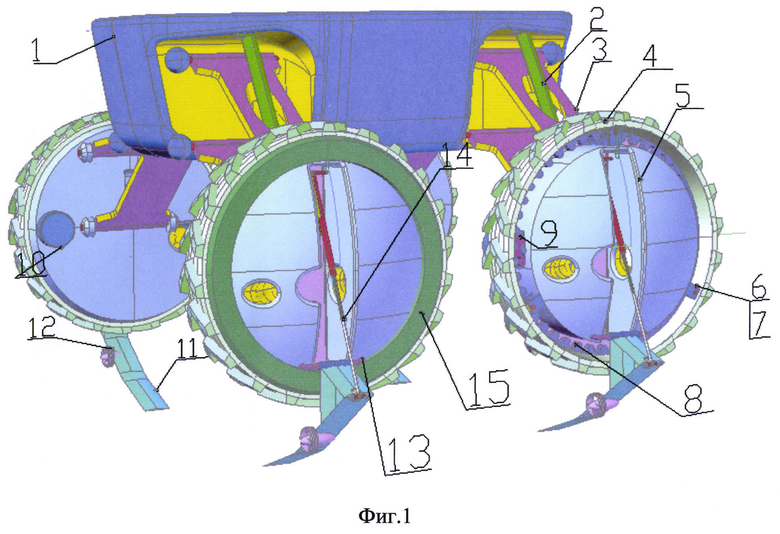
1. Амфибийное транспортное средство, характеризующееся тем, что содержит корпус, источник энергии, систему управления движением транспортного средства и прикрепленные к корпусу посредством подвески колеса, каждое из которых включает обод и неподвижную втулку с полостью, в которой размещено установленное с возможностью вращения на закрепленной на краях полости оси выдвижное подводное крыло, снабженное гребным электроприводом с датчиком угловой скорости, при этом крыло шарнирно соединено с линейным электроприводом, один конец которого закреплен на крыле, а другой - на втулке, снабженной датчиком угловой скорости обода колеса, элементы подвески колеса шарнирно прикреплены к корпусу и к неподвижной втулке, на которой закреплены стойки с осями, на которые опирается обод колеса, внутренняя поверхность которого содержит венец с внутренними зубьями, соединенный с закрепленным на неподвижной втулке приводом вращения обода, состоящим из электромотора с редуктором, выходной вал которого снабжен шестерней, при этом приводы электромоторов присоединены к закрепленному на втулке электронному блоку, соединенному с датчиками угловой скорости обода колеса, датчиком угловой скорости электромотора гребного электропривода и датчиком угла поворота подводного крыла вокруг оси, а система управления движением размещена в корпусе.
2. Амфибийное транспортное средство по п. 1, отличающееся тем, что обод колес оборудован грунтозацепами.
3. Амфибийное транспортное средство по п. 1, отличающееся тем, что привод колес оснащен тормозной системой.
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| АМФИБИЙНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2015 |
|
RU2577626C1 |
| Амфибия | 1987 |
|
SU1435492A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

