Изобретение относится к области управления летательными аппаратами и может быть использовано для автоматического вывода самолета или беспилотного летательного аппарата на аэродром посадки.
Одной из задач управления летательным аппаратом является вывод его из пункта возврата, в общем случае с произвольным местоположением и направлением полета, в точку начала посадки с заданными координатами и курсом, после которой выполняют специфический полет с уменьшением высоты полета по глиссаде на взлетно-посадочную полосу. Применительно к управлению самолетом точку начала посадки иначе называют как условную точку четвертого разворота [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 278]. Известные способы вывода летательного аппарата в точку начала посадки не оптимизированы по пути и затратам времени.
Известен способ автоматизированного возврата самолета на аэродром, включающий: формирование заданного курса и полет в направлении аэродрома с удалением от него пункта возврата не менее 250 км; затем, если курс самолета отличается от посадочного менее чем на 90°, формирование курса в точку четвертого разворота, расположенную на оси взлетно-посадочной полосы (ВПП) и удаленную от ее центра на 21 км, полет с выдерживанием курса до пересечения 5,5 км коридора относительно ВПП; после чего формирование курса в убегающую точку цели, расположенную на оси ВПП на 2,5 км впереди самолета и наведение его в эту точку; иначе формирование текущего курса сначала в одну из двух точек третьего разворота с последующим маневрированием до попадания в 5,5 км коридор и далее в соответствии с ранее указанными действиями. Для обеспечения полета используют наземную и бортовую аппаратуру радиотехнической системы ближней навигации и пилотажно-навигационный комплекс [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 275-278].
Недостатками способа является необходимость применения относительно сложной и дорогой аппаратуры радиотехнической системы ближней навигации и выполнение маневров по продолжительному маршруту, соответственно большие временные затраты на возврат к аэродрому посадки.
Наиболее близким по технической сущности (прототип) является способ возврата на аэродром с построением траектории возврата, включающий: измерение текущих координат самолета, предварительное построение маршрута в виде прямой линии заданного пути, проходящей через пункт возврата и являющейся касательной к дуге предпосадочного разворота самолета для выхода на ось взлетно-посадочной полосы в точке начала посадки (условной точке четвертого разворота) с курсом в направлении ее центра, и непосредственно дуги предпосадочного разворота заданного радиуса, затем осуществление полета по маршруту с учетом измеренных текущих координат самолета. Линию заданного пути характеризуют путевым углом, ее длиной и длиной участка линейного упреждения. Необходимые при этом расчеты выполняют в пилотажно-навигационном комплексе, для чего в его память вводят координаты пункта возврата, центра взлетно-посадочной полосы, ее направление, дальность от центра до точки начала посадки, радиус дуги (окружности) разворота. В процессе управления непрерывно выполняют поворот самолета в сторону: первоначально точки начала, затем завершения предпосадочного поворота и далее взлетно-посадочной полосы. Для чего в пилотажно-навигационном комплексе оценивают отклонение направления полета от направления на точку наведения по координатам ее и самолета [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 278-280].
Недостатком способа является большое время вывода самолета в точку начала посадки, так как маршрут строят в предположении соответствия начального направления полета (начального курса) в пункте возврата требуемому курсу. При движении в произвольном направлении возникает неопределенность, обусловленная возможностью маневров в двух направлениях: вправо и влево от начального курса движения. Правило формирования и выбора маршрута в таких условиях в способе-прототипе не определено. Выход на линию пути, с необходимой точностью, по принципу способа-аналога путем предварительного наведения на аэродром, возможен, но на значительном 250 км и более от него удалении, что увеличивает потребное на такой маневр время.
Технической задачей настоящего изобретения является сокращение времени вывода самолета в точку начала посадки при его полете с произвольным начальным курсом.
Решение поставленной задачи достигается тем, что в известном способе вывода самолета в точку начала посадки, включающем измерение текущих координат самолета, предварительное построение участка маршрута в виде прямой линии заданного пути, являющейся касательной к дуге предпосадочного разворота самолета для выхода на ось взлетно-посадочной полосы в точке начала посадки с курсом в направлении ее центра, и непосредственно дуги предпосадочного разворота заданного радиуса, полет по маршруту с учетом измеренных текущих координат самолета, дополнительно доопределяют маршрут из пункта возврата дугой предварительного разворота заданного радиуса для выхода по касательной к ней прямой линии заданного пути и, с учетом начального курса самолета, комбинаций вариантов право- и левостороннего направления предварительного и предпосадочного разворота, строят четыре возможных маршрута, рассчитывают длину их пути, а полет самолета осуществляют по маршруту, для которого путь до точки начала посадки минимален.
Сущность предлагаемого изобретения состоит в том, что доопределяют новый участок маршрута и полета по нему: дуга предварительного разворота из пункта возврата с выходом на прямую линию заданного пути. Существенно изменен порядок определения этой линии как дополнительной касательной к этой дуге. В обеспечение введен новый относительно прототипа параметр: начальный курс самолета, который может быть определен по приращению измеренных текущих координат при пролете пункта возврата или измерен в этот момент непосредственно, с привлечением бортовых измерителей курса [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 247-253]. Учтена возможность право- и левостороннего направления предварительного и предпосадочного разворота во всех четырех их комбинациях. Это позволило определить возможные маршруты, длину их пути и осуществить полет самолета по маршруту, для которого путь минимален, следовательно, и сократить время вывода самолета в точку начала посадки.
Предложенные изменения, в совокупности с известным, позволяют решить поставленную техническую задачу - сократить время вывода самолета в точку начала посадки при его полете с произвольным начальным курсом.
На фиг. 1 показаны возможные маршруты вывода самолета в точку начала посадки по предложенному способу;
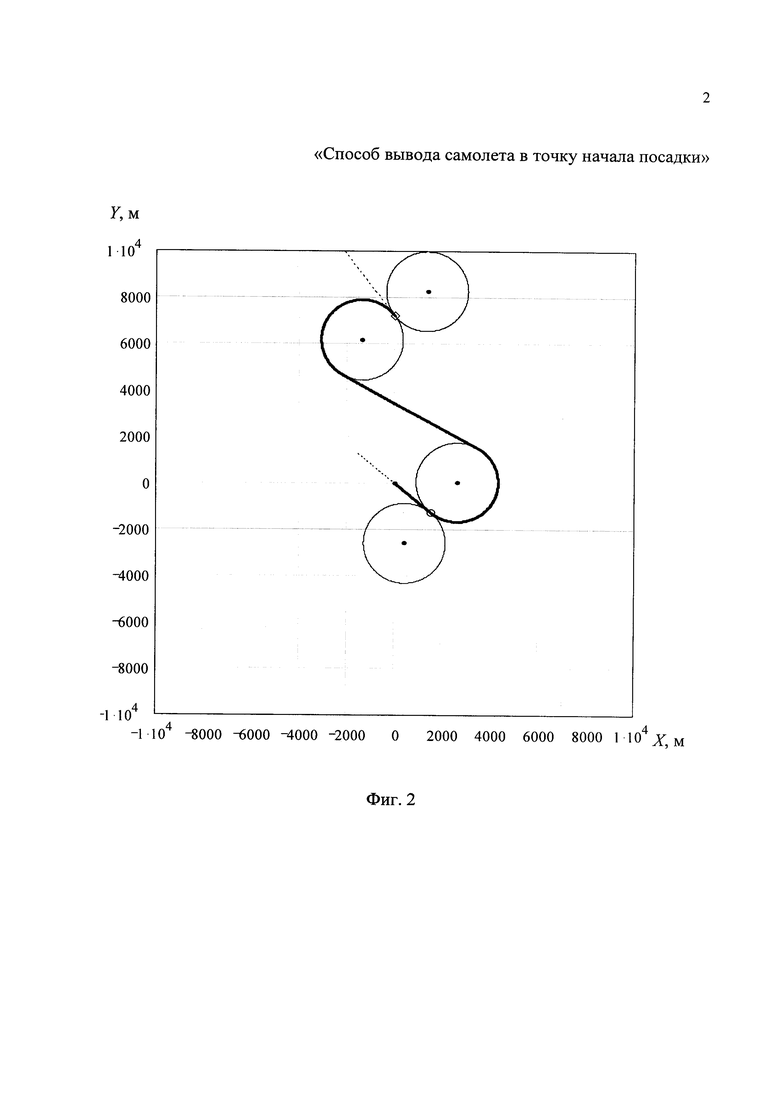
на фиг. 2 - пример построения оптимального маршрута.
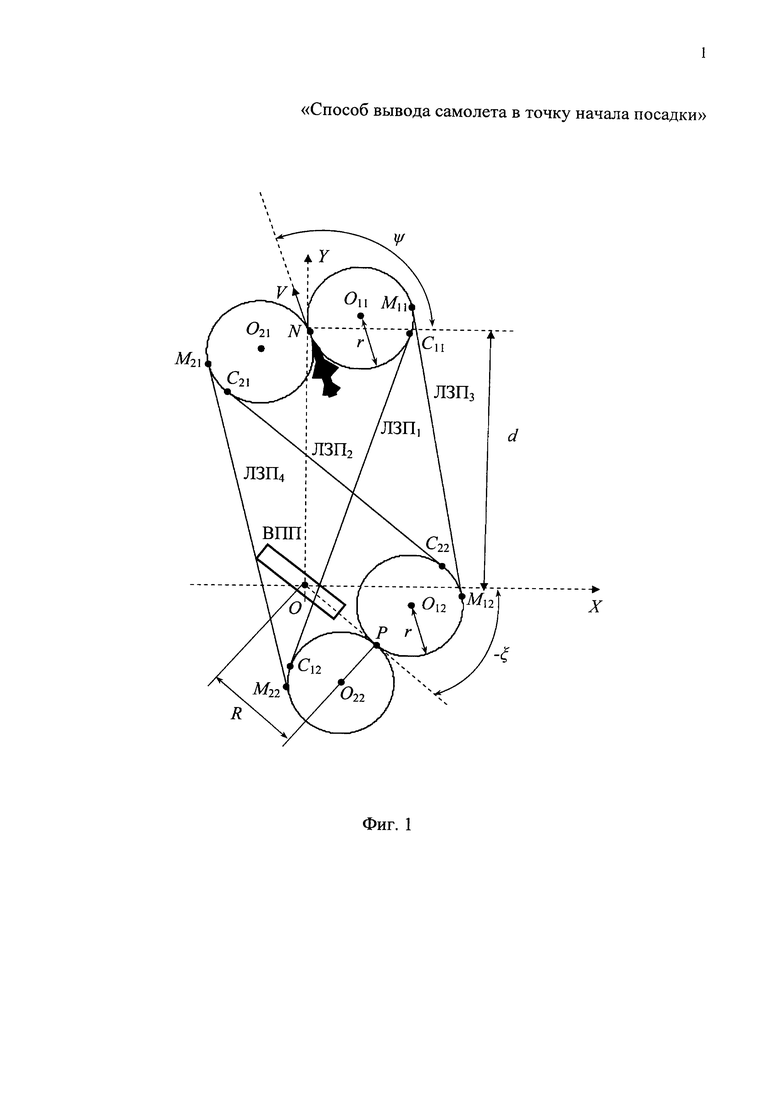
На фиг. 1 принята местная прямоугольная система с началом в центре О взлетно-посадочной полосы, ординатой Y в направлении пункта возврата N, перпендикулярной ей абсциссой X и отсчетом положительных углов от нее против часовой стрелки. Кроме того, введены следующие обозначения: Р - точка начала посадки, О11, O21, O12, O22 - центры окружностей возможных вариантов разворота; С11, С21, М11, М21 - точки возможного выхода из предварительного разворота; С12, С22, М12, М22 - точки возможного начала предпосадочного разворота, ЛЗПi - линии заданного пути для различных направлений разворота, i=1…4, ψ - начальный курс как угол вектора скорости  , r - радиус разворота, ξ - курс посадки на взлетно-посадочную полосу, R - удаление от ее центра точки начала посадки, d - дальность до пункта возврата.
, r - радиус разворота, ξ - курс посадки на взлетно-посадочную полосу, R - удаление от ее центра точки начала посадки, d - дальность до пункта возврата.
На фиг. 2 исходное положение самолета в пункте возврата отмечено ромбиком, точка начала посадки - кружком, а пунктиром - направление полета и взлетно-посадочной полосы (в центре).
Рассмотрим вариант реализации предложенного способа на основе применения принятого в прототипе пилотажно-навигационного комплекса и принципа самонаведения в заданную точку по отклонению курса на нее исходя из ее и измеренных текущих координат самолета.
В исходном состоянии в память пилотажно-навигационного комплекса заносят информацию о заданных параметрах: радиусе разворота r, курсе посадки на взлетно-посадочную полосу ξ и удалении R от ее центра точки начала посадки. Радиус разворота может задаваться непосредственно или рассчитываться по формуле: r=V/ω, где V - скорость самолета, ω - допустимая угловая скоростью разворота [Справочник летчика и штурмана. Под ред. В.М. Лавского. М: Воениздат, 1974, с. 372-373]:
В процессе полета измеряют текущие координаты самолета, которые представляют в местной прямоугольной системе координат фиг. 1.
По команде или в момент прибытия в пункт возврата в пилотажно-навигационном комплексе по указанной информации определяют маршрут, для которого путь до точки начала посадки минимален.
Особенности выполнения данной операции поясним с привлечением фиг. 1. Первоначально по текущим координатам самолета, измеренным в пункте возврата, определяют дальность до него  , а по измерениям в различные, например с промежутком 1 с, моменты времени
, а по измерениям в различные, например с промежутком 1 с, моменты времени  определяют начальный курс самолета
определяют начальный курс самолета  , где arg(⋅) - аргумент комплексного числа (фаза), заключенного в скобки.
, где arg(⋅) - аргумент комплексного числа (фаза), заключенного в скобки.
Здесь и далее принято комплексное представление координат  , где
, где  - реальная часть, абсцисса,
- реальная часть, абсцисса,  - мнимая часть, ордината, i - мнимая единица.
- мнимая часть, ордината, i - мнимая единица.
Поскольку имеются две точки разворота, предварительного и предпосадочного, в каждой из которых возможно движение по- и против- часовой стрелки, то исходя из общего числа сочетаний выход в точку начала посадки возможен по следующим четырем вариантам маршрута.
1) По «восьмерке» с первым правым разворотом по дуге (N, С11), полетом по ЛЗП1 и вторым левым разворотом по дуге (С12, Р).
2) По «восьмерке» с первым левым разворотом по дуге (N, С21), полетом по ЛЗП2 и вторым правым разворотом по дуге (С22, Р).
3) По «кругу» с первым правым разворотом по дуге (N, М11), полетом по ЛЗП3 и вторым правым разворотом по дуге (М12, Р).
4) По «кругу» с первым левым разворотом по дуге (N, М21), полетом по ЛЗП4 и вторым левым разворотом по дуге (М22, Р).
Методика построения маршрутов полета основывается на решении соответствующих геометрических задач и состоит в следующем.
1) Определяют две окружности с центрами О11, O21, по которым может осуществляться разворот самолета в направлении на аэродром посадки. Поскольку вектор скорости самолета является касательной к данным окружностям, а их центры расположены на перпендикуляре к начальному курсу самолета, то координаты центров рассчитывают по формулам

2) Определяют окружности с центрами O12, O22, по которым может осуществляться разворот самолета для захода на ось взлетно-посадочной полосы аэродрома с выходом в точку начала посадки, при этом ось полосы в точке начала посадки является касательной к этим окружностям, а центры расположены на перпендикуляре к ее оси. Координаты этих центров определят по формулам

3) Определяют возможные четыре линии заданного пути как касательные к первым двум окружностям разворота с центрами О11, O21 и к двум другим окружностям с центрами O12, O22. При этом координаты точек касания, соответственно точек выхода из первого разворота, по дуге предварительного разворота, и начала второго разворота, по дуге предпосадочного разворота, для разных вариантов маршрута рассчитывают по формулам
для первого варианта: 
где
 ;
;
для второго варианта: 
где
 ;
;
для третьего варианта: 
где  ;
;
для четвертого варианта: 
где  .
.
5) Определяют длину пути самолета от пункта возврата N до точки начала посадки Р каждого из маршрутов:
вариант 1: 
вариант 2: 
вариант 3: 
вариант 4: 
6) В завершение осуществляют выбор маршрута, длина пути которого из вариантов, рассчитанных по формулам (7)-(10), является минимальной.
На фиг. 2 жирной линией показан результат построения по приведенной методике оптимального маршрута вывода самолета в точку начала посадки для следующих исходных данных: радиус разворота 1719 м, удаление пункта возврата 7200 м, удаление центра взлетно-посадочной полосы от точки начала посадки 2000 м, начальный курс самолета -37,5°, курс посадки на взлетно-посадочную полосу (угол ориентации взлетно-посадочной полосы) -50°. В соответствии с рисунком обеспечивается требуемое построение маршрута с минимальной длиной пути. Расчетная программа выполнена в системе Mathcad, имеется у заявителя и авторов.
После завершения расчетов по командам управления пилотажно-навигационного комплекса осуществляют полет самолета по выбранному маршруту. Для чего оценивают отклонение направления полета от направления на точку наведения по координатам ее и самолета. При этом первоначально выполняют наведение на точку выхода из первого разворота с движением, в силу ограниченного заданного радиуса разворота, по дуге предварительного разворота. После этого выполняют перенацеливание на точку начала второго разворота с полетом по прямой линии заданного пути. По достижении этой точки выполняют перенацеливание и наведение в точку начала посадки с движением по дуге предпосадочного разворота. На заключительном этапе посадки осуществляют перенацеливание самолета на центр взлетно-посадочной полосы с движением в ее центр по глиссаде.
Положительный эффект от изобретения можно оценить, если ориентироваться на выполнение в способе-прототипе предварительного наведения в направлении аэродрома с требуемого удаления от него 250 км. Сравнение с фиг. 2 показывает, что в предлагаемом способе расстояние маршрута, следовательно, и время его прохождения сокращается не менее чем на порядок.
Таким образом, предложенное техническое решение обеспечивает сокращение на порядок времени вывода самолета в точку начала посадки при его полете с произвольным начальным курсом за счет выполнения полета по маршруту с минимальным расстоянием.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗВРАТЕ НА КОРАБЛЬ | 2011 |
|
RU2450312C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА НАВИГАЦИОННУЮ ТОЧКУ С ЗАДАННОГО НАПРАВЛЕНИЯ | 2015 |
|
RU2585204C1 |
Изобретение относится к способу вывода самолета в точку начала посадки. Для вывода самолета в точку начала посадки измеряют текущие координаты самолета, предварительно строят участок маршрута в виде прямой линии заданного пути, являющейся касательной к дуге предпосадочного разворота самолета для выхода на ось взлетно-посадочной полосы в точке начала посадки с курсом в направлении ее центра, доопределяют маршрут из пункта возврата дугой предварительного разворота заданного радиуса для выхода по касательной к ней прямой линией заданного пути, строят четыре возможных маршрута комбинаций право- и левостороннего предварительного и предпосадочного разворота, рассчитывают длину их пути, осуществляют полет по маршруту с минимальной длиной пути до точки начала посадки. Обеспечивается сокращение времени вывода самолета в точку начала посадки. 2 ил.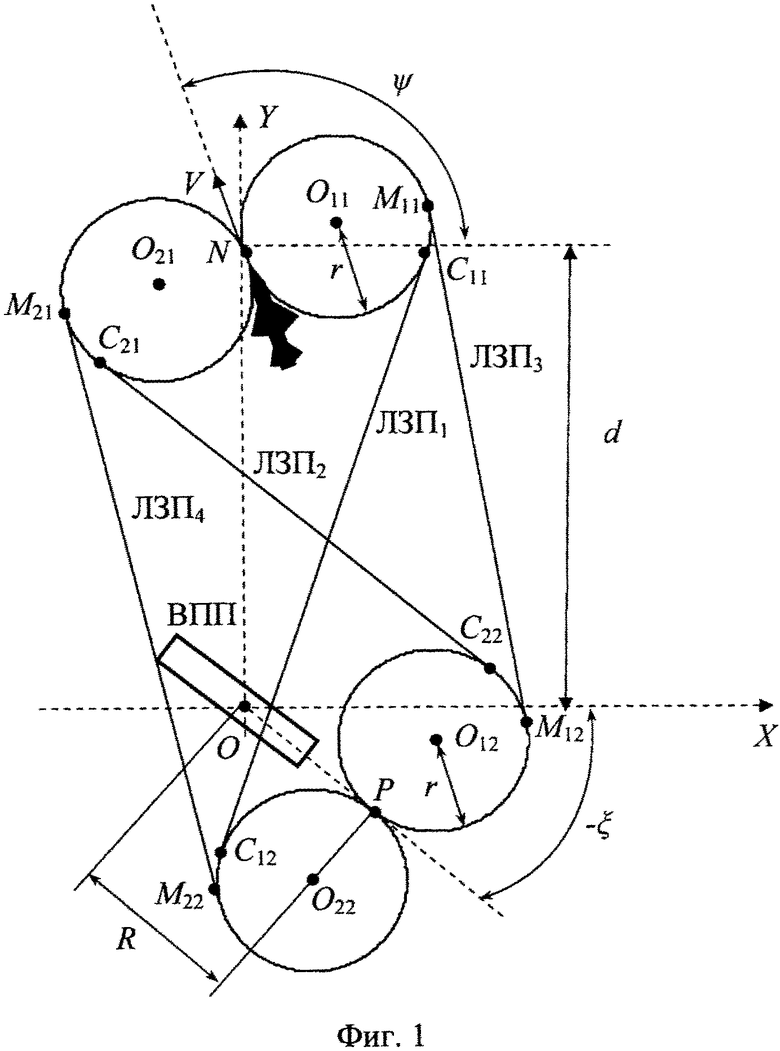
Способ вывода самолета в точку начала посадки, включающий измерение текущих координат самолета, предварительное построение участка маршрута в виде прямой линии заданного пути, являющейся касательной к дуге предпосадочного разворота самолета для выхода на ось взлетно-посадочной полосы в точке начала посадки с курсом в направлении ее центра, и непосредственно дуги предпосадочного разворота заданного радиуса, полет по маршруту с учетом измеренных текущих координат самолета, отличающийся тем, что дополнительно доопределяют маршрут из пункта возврата дугой предварительного разворота заданного радиуса для выхода по касательной к ней прямой линии заданного пути и, с учетом начального курса самолета, комбинаций вариантов право- и левостороннего направления предварительного и предпосадочного разворота, строят четыре возможных маршрута, рассчитывают длину их пути, а полет самолета осуществляют по маршруту, для которого путь до точки начала посадки минимален.
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| WO 2001057828 A1, 09.08.2001 | |||
| US 7084785 B2, 01.08.2006. | |||

