Изобретение относится к области радионавигации и может быть использовано для привода летательного аппарата в заданную точку, возврата и посадки на аэродром, в том числе в условиях крайнего Севера, на необорудованных территориях.
Известен угломерно-дальномерный способ авиационной ближней радионавигации, включающий измерение на борту летательного аппарата высоты полета, наклонной дальности и азимута радионавигационного пункта с известным местоположением, привод по результатам измерений летательного аппарата в заданную точку, в том числе возврат и заход на посадку на аэродром при расположении радионавигационного пункта вблизи него, путем расчета в пилотажно-навигационном комплексе траектории полета, сопоставления ее с текущими значениями высоты, азимута, дальности и компенсации расхождений соответствующим маневром летательного аппарата.
Измерение наклонной дальности выполняют с помощью бортового за-просчика и ответчика (ретранслятора), расположенного в радионавигационном пункте, включает последовательность следующих операций: излучение бортовым передатчиком радиоимпульса, прием и ретрансляцию его с наземного радионавигационного пункта, прием ретранслированного радиоимпульса бортовым приемником дальномера, измерение запаздывания ретранслированного радиоимпульса относительно излученного с последующим определением дальности.
Измерение азимута включает последовательность следующих операций: излучение радиомаяком азимутального радиосигнала с помощью направленной антенны с вращением диаграммы направленности с одновременной передачей с помощью ненаправленной антенны опорного радиосигнала, несущего информацию о мгновенном положении диаграммы направленности направленной антенны, прием, разделение и детектирование бортовым навигационным приемником этих радиосигналов, измерение разности фаз между продетектированными сигналами и определение по ней азимута. [1. Владимиров В.Л., Ковалев В.В., Хмуров Н.Н. Средства и системы радионавигационного обеспечения летательных аппаратов. - М.: Военное издательство, 1990, с. 320-343].
Из-за недостаточной точности измерений данным способом не обеспечивается процесс непосредственно посадки летательного аппарата на аэродром. Другими недостатками являются необходимость привлечения значительного частотного ресурса, набора наземного и бортового оборудования, низкое быстродействие обусловленное инерционностью процесса вращения диаграммы направленности антенны.
Известен способ ближней радионавигации и посадки самолета, который после захода самолета на посадку включает: измерение наклонной дальности с помощью бортового оборудования и наземного ретранслятора, формирование излучениями наземных курсового и глиссадного радиомаяков равносигнальных зон электромагнитного поля с различающимися частотами модуляции в горизонтальной плоскости в направлении оси взлетно-посадочной полосы и в вертикальной плоскости под углом планирования самолета, регистрацию с помощью бортовых приемников отклонения самолета от нее, полет в направлении оси равносигнальных зон путем компенсации отклонения от нее [1, стр. 235-237].
Наземный ретранслятор, курсовой и глиссадный радиомаяки расположены в непосредственной близости от аэродрома.
Данный способ дополняет предыдущий и применяется в комбинации, последовательно с ним. Недостатком способа является необходимость привлечения значительного частотного ресурса, набора наземного и бортового оборудования, применяемого для решения только одной частной, хотя и важной задачи, посадки самолета. Инерционен процесс переориентации линии глиссады на другие взлетно-посадочные полосы с изменением направления взлета-посадки. Излучения ретранслятора, курсового и глиссадного радиомаяков демаскируют расположение аэродрома.
Наиболее близким по технической сущности и достигаемому эффекту (прототип) является способ ближней авиационной радионавигации, который включает измерение высоты полета и скорости ее изменения с помощью бортовых средств измерения высоты, определение координат местоположения летательного аппарата и вектора скорости, управление полетом путем компенсации отклонений углов ориентации вектора дальности от летательного аппарата до заданной точки наведения (заданный курс и заданный угол наклона траектории) от углов ориентации вектора скорости (текущий угол пути и угол наклона траектории), соответствующим изменением последнего. [2. Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 272-280].
Определение координат местоположения летательного аппарата и вектора скорости может выполняться псевдодальномерно-доплеровским способом радионавигации, который включает формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника, по заданному дальномерному коду разделение принятых сигналов, измерение радионавигационных параметров: моментов прихода и частоты радиосигналов, с учетом неопределенности этих параметров определение навигационных параметров: псевдодальностей и псевдорадиальных скоростей, определение в горизонтальной плоскости по навигационным параметрам с учетом высоты полета координат летательного аппарата и, дополнительно с учетом скорости изменения высоты, вектора скорости. [3. ГЛОНАС. Принципы построения и функционирования/ Под. Ред. А.И. Петрова, В.Н. Харисова. - М.: Радиотехника, 2005, с. 12-17].
Недостатком способа-прототипа в сочетании с псевдодальномерно-доплеровским способом радионавигации является низкая точность привода летательного аппарата в заданный пункт, обусловленная низкой точностью определения координат и вектора скорости летательного аппарата, особенно в дальней зоне.
Техническим результатом изобретения является повышение точности наведения в заданный пункт за счет повышения точности определения координат и вектора скорости летательного аппарата.
Указанный результат достигается тем, что в известном способе авиационной ближней радионавигации, включающем измерение высоты полета летательного аппарата и скорости ее изменения с помощью бортовых средств измерения высоты, формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника, по заданному дальномерному коду разделение принятых сигналов, измерение радионавигационных параметров: моментов прихода и частоты радиосигналов, с учетом неопределенности этих параметров определение навигационных параметров: псевдодальностей и псевдорадиальных скоростей, определение в горизонтальной плоскости по навигационным параметрам, с учетом измеренной высоты полета, координат летательного аппарата и, дополнительно с учетом скорости изменения высоты, вектора скорости, управление полетом по полученным координатам и вектору скорости соответствующим изменением последнего, согласно изобретению формируют радионавигационное поле, по меньшей мере, тремя радионавигационными пунктами, расположенными на земной поверхности в окрестности аэродрома, дополнительно с помощью бортового запросчика и наземного ретранслятора по излучению радиосигнала запросчика измеряют совместно запаздывание и частотный сдвиг ретранслированного сигнала, по этим измерениям определяют наклонную дальность и радиальную скорость полета на ретранслятор, при этом радиосигнал запросчика кодируют дальномерным кодом, а координаты и вектор скорости определяют с учетом полученной наклонной дальности и радиальной скорости.
Технический результат достигается также за счет того, что радионавигационные пункты расположены в вершинах правильного многоугольника, центр которого совмещен с центром взлетно-посадочной полосы аэродрома, а ретранслятор территориально совмещен с одним из радионавигационных пунктов.
Технический результат достигается также за счет того, что излучают запросчиком радиосигнал в заданный для каждого летательного аппарата момент времени из условия отсутствия на интервале времени от момента начала излучения радиосигнала до завершения приема ретранслированного радиосигнала излучений запросчиков других летательных аппаратов.
Сущность изобретения состоит в том, что формируют радионавигационное поле, по меньшей мере тремя, радионавигационными пунктами, расположенными на земной поверхности в окрестности аэродрома, дополнительно с помощью бортового запросчика и наземного ретранслятора по излучению радиосигнала запросчика измеряют совместно запаздывание и частотный сдвиг ретранслированного сигнала, по этим измерениям определяют наклонную дальность и радиальную скорость полета на ретранслятор, при этом радиосигнал запросчика кодируют дальномерным кодом, а координаты и вектор скорости определяют с учетом полученной наклонной дальности и радиальной скорости.
Сформированным радионавигационным полем в области ограниченной радиусом системы радионавигационных пунктов с расположением их в вершинах правильного многоугольника, центр которого совмещен с центром взлетно-посадочной полосы аэродрома, погрешности навигационных определений минимальны. Это способствует повышению точности наведения летательного аппарата и безопасности маневров захода и посадки. В дальней зоне погрешности резко возрастают.
Кодированием радиосигнала запросчика дальномерным кодом обеспечивается совместность, одновременность по одному запросу измерения запаздывания и частотного сдвига со снятием неопределенности точки отсчета, присущей наклонным псевдодальностям и псевдорадиальным скоростям способа-прототипа. Погрешности такого совместного определения наклонной дальности и радиальной скорости не зависят от дальности.
За счет этого, учета полученной наклонной дальности и радиальной скорости в совокупности со всеми навигационными определениями, независимыми для разных типов, достигается повышение точности определения координат и вектора скорости и тем самым повышение точности наведения.
Сущность и особенности настоящего изобретения поясняются вариантом его осуществления со ссылками на прилагаемые фигуры.
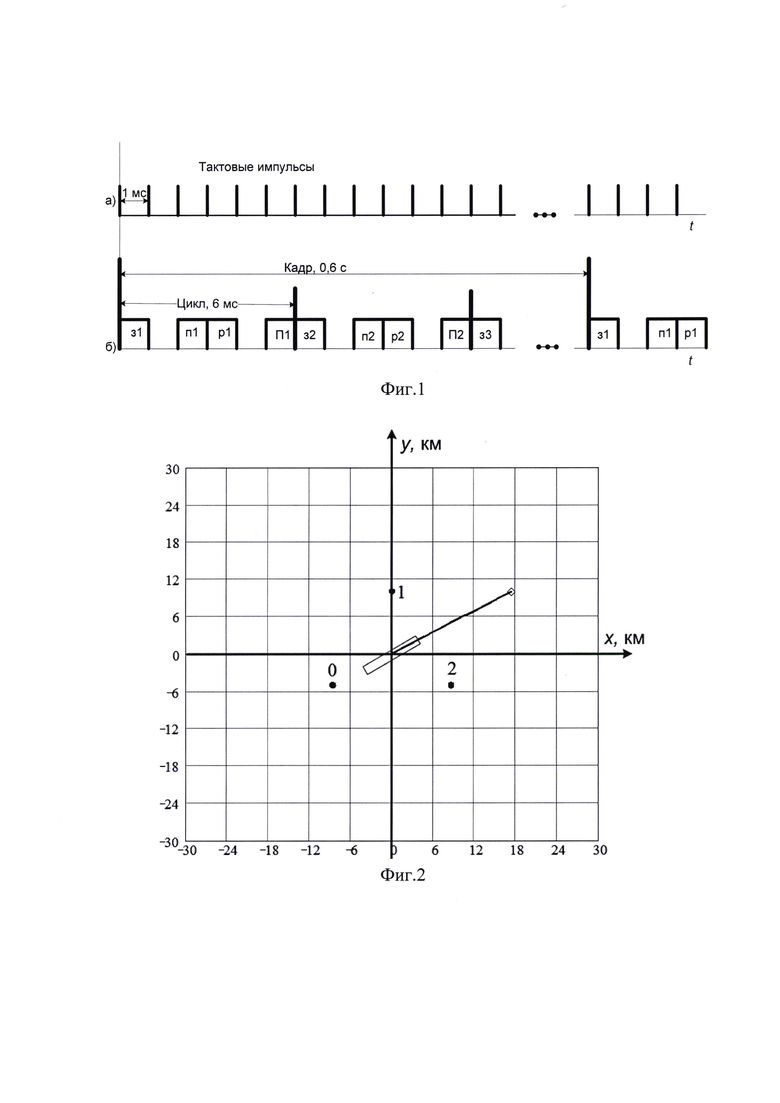
На фиг. 1 представлены временные диаграммы функционирования системы навигации при массовом применении летательных аппаратов.
На фиг. 2 показан план размещения на земной поверхности по вершинам равностороннего треугольника радионавигационных пунктов системы минимального состава. Пункты системы обозначены жирными точками с указанием номеров. Пункт с номером 0 является центральным, находится на продолжении взлетно-посадочной полосы (ВПП) в виде вытянутого прямоугольника. Ромбиком отмечено положение летательного аппарата, движущегося по указанной прямой линии в центр ВПП. Центр системы горизонтальных координат совмещен с центром ВПП, ордината у направлена в опорном направлении, например северном, тогда абсцисса х направлена на восток.
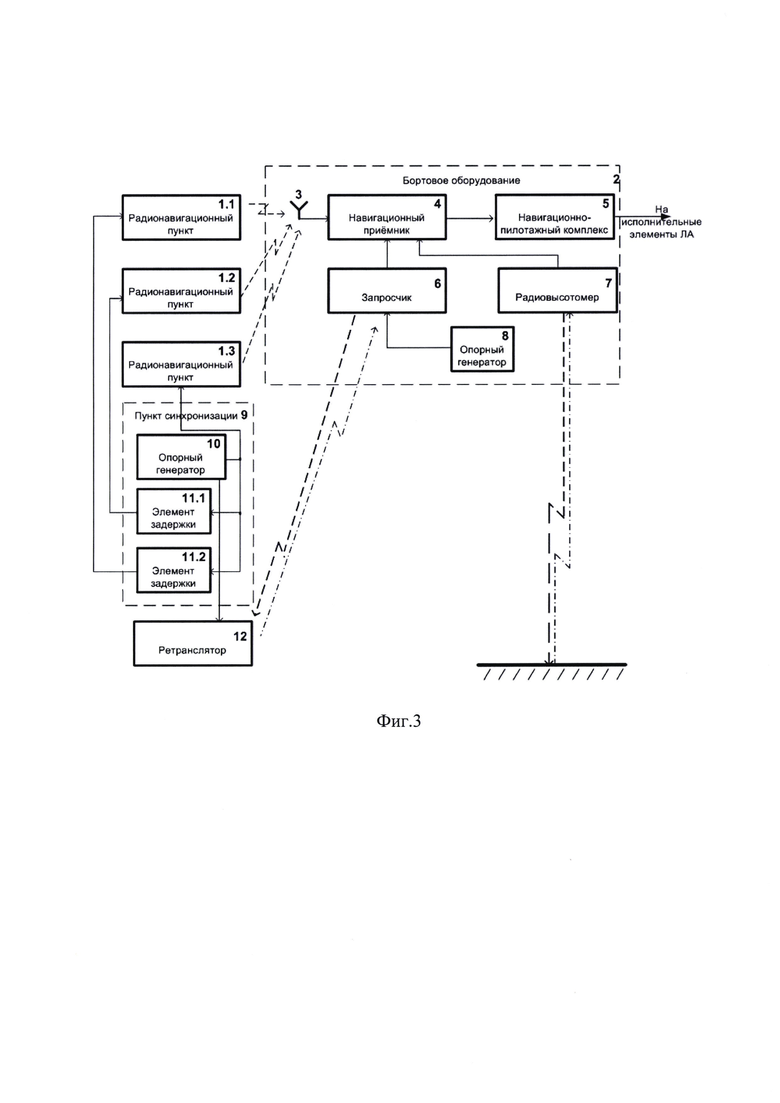
На фиг. 3 приведена структурная схема варианта системы навигации, в которой реализуется предложенный способ. Штриховыми линиями условно показаны пути распространения радиоволн.
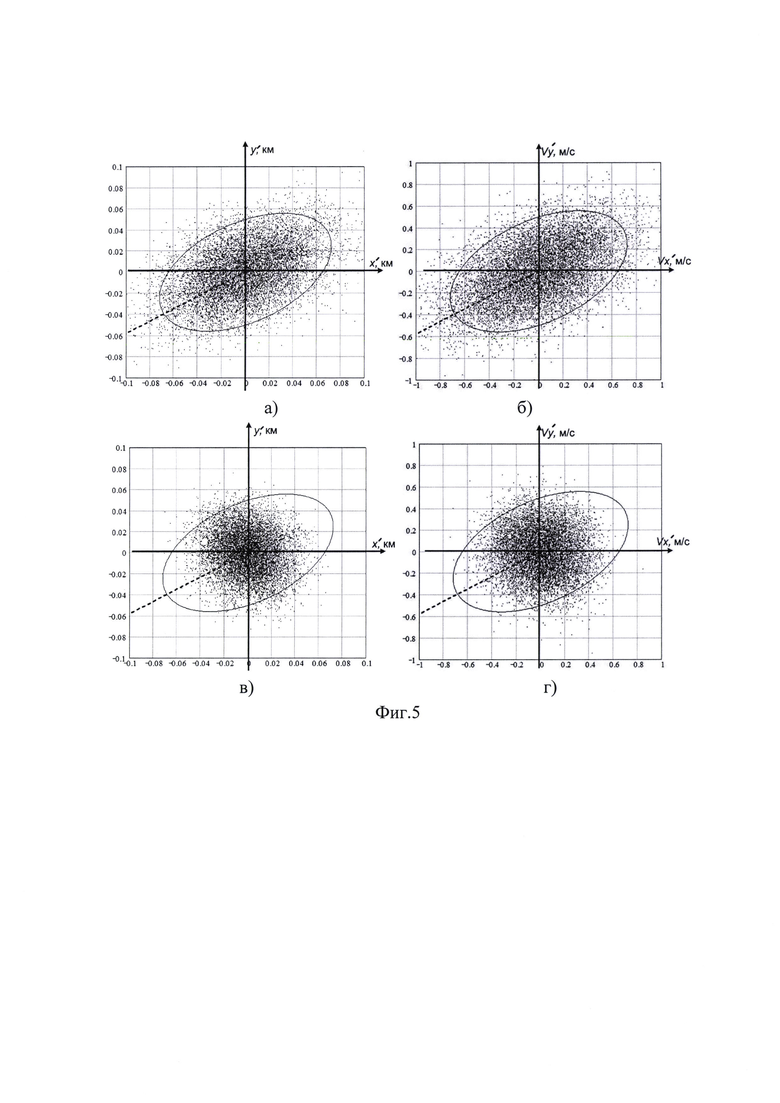
На фиг. 4 и фиг. 5 показано поле рассеивания оценок координат и скорости в горизонтальной плоскости при удалении летательного аппарата от центра ВПП в дальнюю зону на дальность 300 км и в ближнюю зону на 5 км, примерно в точку так называемого четвертого разворота. Рисунки, обозначенные как а) и б) - рассеивание оценок координат и скорости в отсутствии измерений наклонной дальности и радиальной скорости (прототип, псевдо-дальномерно-доплеровский метод), рисунки в) и г) - аналогично при наличии этих измерений посредством запросчика и ретранслятора. Центры соответствующих систем координат перенесены в точку истинных значений. Пунктирной прямой линией отмечен маршрут движения, тонкими линиями - расчетный в отсутствии измерений наклонной дальности и радиальной скорости эллипс рассеивания.
Система навигации фиг. 3 включает радионавигационные пункты 1.1-1.3, бортовое оборудование 2, включающее антенну 3, радионавигационный приемник 4, навигационно-пилотажный комплекс 5, запросчик 6, радиовысотомер 7 и опорный генератор 8, пункт синхронизации, включающий опорный генератор 10, элементы задержки 11.1, 11.2 и ретранслятор 12.
Первый выход опорного генератора 10 пункта синхронизации 9 соединен с входами элементов задержки 11.1, 11.2 и входом радионавигационного пункта 1.3. Выходы элементов задержки 11.1, 11.2 подключены к входам соответственно радионавигационных пунктов 1.2, 1.1. Второй выход опорного генератора 10 соединен с входом ретранслятора 12. Антенна 3, первый вход навигационного приемника 4 и навигационно-пилотажный комплекс 5 бортового оборудования 2 соединены последовательно. Опорный генератор 8 соединен с запросчиком 6, выход которого подключен ко второму входу навигационного приемника 4. Выход радиовысотомера 7 соединен с третьим входом навигационного приемника 4.
Бортовой радиовысотомер 7 является штатным средством летательного аппарата, выполняет зондирование земной поверхности и по задержке отраженного сигнала измеряют высоту полета. По разности измерений за заданный промежуток времени определяется скорость изменения высоты.
Ретранслятор 12 и пункт синхронизации 9 территориально совмещены с одним из радионавигационных пунктов, центральным, например 1.1. В наиболее удаленный от центрального пункта радионавигационный пункт 1.3 синхросигналы от опорного генератора 10 пункта синхронизации 9 поступают без дополнительной задержки. Для варианта системы в виде равностороннего треугольника на все периферийные пункты 1.2, 1.3 устанавливается нулевая задержка. Передача синхросигналов от опорного генератора 10 пункта синхронизации 9 в радионавигационные пункты 1.1-1.3 может осуществляться по радиоканалу или, например по волоконно-оптическим линиям связи.
Радионавигационными пунктами 1.1-1.3 формируется радионавигационное поле путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом. Эти пункты представляют собой сильно упрощенный вариант бортового спутникового источника радионавигационных сигналов системы ГЛОНАС. Принятые в этой системе принципы и параметры сигналов применимы и в настоящем изобретении: частотное разделение радионавигационных каналов, период излучения 1 мс, длительность элементарного импульса 2 мкс, база 511, двоичная фазовая модуляция (ФМ-2). Соответственно навигационный приемник 4 есть сильно упрощенная копия аппаратуры потребителя указанной спутниковой системы. Наряду с вариантом частотного разделения каналов возможен принцип кодового разделения принятый в системе GPS.
В канале запросчик 6 - ретранслятор 12 применимы указанные параметры сигналов, но со следующими особенностями. Запрос осуществляется радиосигналами по-прежнему длительностью 1 мс, но в отличие от способа-аналога с заданным дальномерным кодом запросчика. По получении от запросчика 6 сигнала в ретрансляторе 12 фиксируют момент прихода запроса (сигнала), выполняют опознавание принадлежности и по окончании переизлучают (ретранслируют) с последующим совместным измерением в запросчике радионавигационных параметров: запаздывания и частотного доплеровского сдвига ретранслированного радиосигнала относительно излученного (запросного). Затем определяют, умножением соответственно на скорость света и длину волны, навигационные параметры: наклонную дальность и радиальную скорость. Излучают бортовым запросчиком радиосигнал в заданный для каждого летательного аппарата момент времени из условия отсутствия на интервале времени от момента начала излучения радиосигнала до завершения приема ретранслированного радиосигнала излучений запросчиков других летательных аппаратов. Для выполнения этого условия бортовой опорный генератор 8 синхронизируют с опорным генератором 10 наземного пункта синхронизации 9.
Временные диаграммы функционирования системы ближней радионавигации фиг. 1 иллюстрируют возможность обеспечения операции запроса-ретрансляции на одной частоте для совокупности 100 летательных аппаратов по принципу временного разделения каналов.
На эпюре а) показана тактовая периодическая последовательность импульсов синхронизации наземного 10 опорного генератора с периодом 1 мс.
На эпюре б) показаны циклы и кадр функционирования системы.
Цикл длительностью 6 мс включает: з1 - интервал времени излучения сигнала запроса запросчиком 6 первого летательного аппарата, далее пропуск на время распространения до ретранслятора 12 из расчета на максимальную дальность 300 км, п1 - прием запроса ретранслятором, p1 - ретрансляция первого запросного сигнала, далее пропуск на время обратного пути, П1 - прием ответного сигнала запросчиком 6.
Во втором цикле выполняется запрос вторым летательным аппаратом и т.д. в течение кадра 0,6 с. Затем процесс циклически повторяется.
Возможен вариант реализации способа с ретрансляцией на частоте отличной от частоты приема. Тогда длительность цикла и кадра сокращается вдвое.
Приведенные здесь и далее различные варианты выполнения операций способа приводят к заявленному техническому решению.
Последующий принцип функционирования системы ближней радионавигации фиг. 3 состоит в следующем.
С помощью бортового радиовысотомера 7 измеряют высоту полета летательного аппарата над земной поверхностью и скорость ее изменения


В уравнениях взаимосвязи (1), (2) здесь и далее измерения и оценки отмечены скобкой над соответствующими навигационными параметрами.
Опорным генератором 10 пункта синхронизации 9 формируют периодическую последовательность импульсов синхронизации. Эти импульсы задерживаются в элементах задержки 11.1-11.2 с обеспечением одновременного поступления в радионавигационные пункты 1.1-1.3.
В радионавигационных пунктах по импульсам синхронизации формируют и синхронно, одновременно излучают широкополосные периодические радиосигналы с заданным дальномерным кодом.
С помощью антенны 3 и бортового навигационного приемника 4 из состава бортового радиотехнического оборудования 2 летательного аппарата осуществляют прием излученных радиосигналов и их разделение.
Принятые сигналы различаются запаздыванием и доплеровским сдвигом частоты, определяемым скоростью и направлением полета, взаимным положением летательного аппарата и радионавигационных пунктов.
По заданному дальномерному коду измеряют радионавигационные параметры: моменты прихода и несущую частоту принятых радиосигналов, и определяют навигационные параметры, псевдодальность  и псевдорадиальную скорость
и псевдорадиальную скорость  где n=0,…,N-1 - номер радионавигационного пункта при общем количестве N≥3.
где n=0,…,N-1 - номер радионавигационного пункта при общем количестве N≥3.
Для навигационных измерений псевдодальности и псевдорадиальной скорости известны [3, с. 69-74] уравнения взаимосвязи


где D', V' - неопределенность точки отсчета дальности и радиальной скорости.
Неопределенность точки отсчета дальности обусловлена отсутствием высокоточной синхронизации моментов наземного излучения и бортового приема, а радиальной скорости нестабильностью частоты генераторов при излучении и приеме.
Для упрощения записи зависимости истинных значений параметров Dn от высоты z и горизонтальных координат х,у, a Vn дополнительно от составляющих вектора скорости полета в вертикальной Vz и горизонтальной плоскости Vx,Vy не указаны.
Составляющие вектора скорости взаимосвязаны с параметрами траектории полета, курсом (путевым углом) ψ и углом наклона траектории ϕ:

где V - модуль линейной скорости полета.
Отсчет положительных значений курса выполняется по часовой стрелке от оси ординат, а угла наклона траектории от горизонтальной плоскости вверх.
Истинные значения наклонной дальности и радиальной скорости равны


где  Xn, Yn, Zn - координаты радионавигационных пунктов.
Xn, Yn, Zn - координаты радионавигационных пунктов.
С помощью бортового запросчика 6 и ретранслятора 12 измеряют наклонную дальность до центрального радионавигационного пункта и одновременно радиальную скорость с уравнениями взаимосвязи


С учетом измеренной высоты (1), наклонной дальности (8) и псевдодальности (3) определяют, дополнительно к измеренной высоте полета, горизонтальные координаты, например методом наименьших квадратов, как положение минимума по неизвестным навигационным параметрам суммы квадратов разности измеренных и истинных значений навигационных параметров с весом обратно пропорциональным дисперсии измерений 
где  - дисперсия измерений наклонной и псевдодальности,
- дисперсия измерений наклонной и псевдодальности,  - операция замены в функции слева истинного значения высоты измеренным параметром.
- операция замены в функции слева истинного значения высоты измеренным параметром.
При минимизации по формуле (10) требуется привлечение численных методов.
При полной неопределенности о местоположении летательного аппарата на основе работы [4. Щербачев В.А. Замкнутые решения при определении координат в распределенной разностно-дальномерной системе. «Радиотехника», 2013, №4, с. 4-8.] определение местоположение обеспечивается решением системы уравнений взаимосвязи (3) в алгебраической форме

где  - вектор оценок горизонтальных координат,
- вектор оценок горизонтальных координат, 

 m=0,…,N-2,
m=0,…,N-2,  - разность дальностей, волнистая черта над величиной - операция центрирования, вычитания из исходной величины соответствующего значения координаты центрального радионавигационного пункта,
- разность дальностей, волнистая черта над величиной - операция центрирования, вычитания из исходной величины соответствующего значения координаты центрального радионавигационного пункта,  - операция псевдообращения матрицы, Т - знак транспонирования, -1 - операция обращения матрицы.
- операция псевдообращения матрицы, Т - знак транспонирования, -1 - операция обращения матрицы.
В соответствии с формулой (11) определение координат выполняют по разности псевдодальности относительно центрального пункта, а учет измеренной наклонной дальности (8) выполняют заменой ее неизвестного значения на измеренное. Дисперсии измерений  не учитываются, что сопровождается некоторыми потерями потенциальной точности.
не учитываются, что сопровождается некоторыми потерями потенциальной точности.
Уточнение оценок координат (11) достигается линеаризацией функции наклонной дальности (6) в окрестности  путем разложения в ряд Тейлора с удержанием трех членов, затем решением системы уравнений взаимосвязи (3), (8) и получением уточненных оценок также в алгебраической форме
путем разложения в ряд Тейлора с удержанием трех членов, затем решением системы уравнений взаимосвязи (3), (8) и получением уточненных оценок также в алгебраической форме

где  - вектор уточненных оценок координат,
- вектор уточненных оценок координат, 




 - операция замены в функции слева неизвестных величин их оценочными значениями
- операция замены в функции слева неизвестных величин их оценочными значениями 
И в формуле (12) исходными являются разности псевдодальностей, а учет наклонной дальности выполняют с весом пропорциональным дисперсии, дополнительно оценивают неопределенность псевдодальностей.
Далее в процессе полета для сокращения количества расчетных операций целесообразен переход в режим слежения, когда расчет по формуле (11) не выполняют, а в качестве оценочных значений горизонтальных координат в формуле (12) при выполнении операции замены  используют результат предыдущего измерения.
используют результат предыдущего измерения.
По полученным координатам (10) или (12) решением системы линейных уравнений взаимосвязи (4), (9) с учетом измеренной высоты, скорости ее изменения, дисперсии измерений радиальной и псевдорадиальной скорости определяют вектор скорости полета в горизонтальной плоскости

где  - вектор оценок составляющих вектора скорости,
- вектор оценок составляющих вектора скорости, 
 - операция замены в функции слева неизвестных величин их оценками
- операция замены в функции слева неизвестных величин их оценками  - дисперсия измерений радиальной и псевдорадиальной скорости.
- дисперсия измерений радиальной и псевдорадиальной скорости.
В отсутствии измерений наклонной дальности  и радиальной скорости
и радиальной скорости  дисперсии
дисперсии  Соответствующие компоненты в формулах (12), (13) обращаются в ноль с переходом к псевдодальномерно-доплеровскому методу навигационных определений способа-прототипа.
Соответствующие компоненты в формулах (12), (13) обращаются в ноль с переходом к псевдодальномерно-доплеровскому методу навигационных определений способа-прототипа.
Полученные координаты  составляющие вектора скорости в горизонтальной плоскости
составляющие вектора скорости в горизонтальной плоскости  с выхода навигационного приемка 4, а также измеренная высота
с выхода навигационного приемка 4, а также измеренная высота  и скорость ее изменения
и скорость ее изменения  поступают в пилотажно-навигационный комплекс 5 для управления полетом.
поступают в пилотажно-навигационный комплекс 5 для управления полетом.
В пилотажно-навигационном комплексе 5 по полученным координатам и координатам точки наведения (xo,yo,zo) определяют вектор дальности от летательного аппарата в точку наведения и углы его ориентации в горизонтальной (заданный угол пути) и вертикальной (заданный угол наклона траектории) плоскости

Определяют углы ориентации вектора скорости

Управление полетом выполняют путем компенсации отклонений углов ориентации вектора дальности (14) и вектора скорости (15), изменением последнего соответствующим маневром в горизонтальной и вертикальной плоскости путем воздействия на исполнительные элементы летательного аппарата.
Для доказательства заявленного технического результата и количественной сравнительной со способом-прототипом оценки достигаемой точности выполнено имитационно-статистическое моделирование с расчетом навигационных параметров по формулам (11), (12) применительно к системе радиусом 10 км с конфигурацией фиг. 1. Результаты показаны на фиг. 4, 5. При моделировании к истинным значениям измеряемых параметров добавлялись нормальные случайные погрешности из расчета достигнутых в системе ГЛОНАС со средними квадратическими отклонениями равными 30 м для псевдодальности, 0,3 м/с для псевдорадиальной скорости и в полтора раза меньших для наклонной дальности и радиальной скорости по причине удвоения значений параметров на пути ретрансляции. Установлена высота полета для ближней зоны 600 м на дальности 5 км, для дальней зоны 6000 м на дальности 300 км. Высота подъема излучателей радионавигационных пунктов 10 м. Скорость полета 80 м/с, курс - 120 град на центр взлетно-посадочной полосы (ВПП) по ее оси со снижением при углах наклона траектории -6,8 град и -1,1 град, соответственно в ближней и дальней зоне.
В дальней зоне и определении навигационных параметров псевдодальномерно-доплеровским методом способа-прототипа фиг. 4а), б) поле рассеивания оценок координат и скорости концентрируется вблизи линии пеленга симметрично относительно истинного значения с большим диапазоном рассеивания. Привлечение измерений дальности и радиальной скорости кардинально повышает точность и надежность навигационного решения фиг .4в), г). В ближней зоне фиг. 5 изменения менее значимые, но соответствующее рассеивание снижается примерно в два раза в направлении пункта наведения, центра ВПП.
В таблице 1 приведены средние квадратические ошибки определения параметров векторов дальности и скорости (14), (15), соответствующие условиям, принятым при моделировании фиг. 4, 5. В таблице обозначено: вариант 1 - способ-прототип, вариант 2 - предлагаемый способ.

Согласно данным таблицы 1 для способа-прототипа в дальней зоне на дальности 300 км возникают значительные ошибки определения углов ориентации вектора дальности и вектора скорости, для последнего вплоть до аномальных. В предлагаемом способе 2 такие ошибки существенно снижаются. В ближней зоне примерно в два раза уменьшаются ошибки определения вектора скорости. Соответственно повышается точность привода летательного аппарата в заданный пункт.
Таким образом, заявленный способ авиационной ближней радионавигации обеспечивает повышение точности наведения летательного аппарата в заданный пункт за счет повышения точности определения координат и вектора скорости летательного аппарата.
Вследствие относительно небольшого необходимого для реализации набора наземного оборудования (в сравнении со способами-аналогами и особенно способом-прототипом в варианте спутниковой глобальной радионавигации), отсутствия операций способа-аналога по переориентации линии глиссады на другие взлетно-посадочные полосы, предлагаемый способ применим в том числе, в условиях крайнего Севера, на необорудованных территориях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| СПОСОБ ТРАЕКТОРНОГО КОНТРОЛЯ МНОГОПУНКТНЫМ ИЗМЕРИТЕЛЬНЫМ КОМПЛЕКСОМ МНОГОИМПУЛЬСНЫХ ОРБИТ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ВЫСОКОЭЛЛИПТИЧЕСКИЕ, ГЕОПЕРЕХОДНЫЕ И ГЕОСТАЦИОНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ РАЗГОННЫХ БЛОКОВ | 2024 |
|
RU2834499C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |

Изобретение относится к способу авиационной ближней радионавигации. Для навигации летательного аппарата формируют радионавигационное поле по меньшей мере тремя радионавигационными пунктами, расположенными на земной поверхности в окрестности аэродрома определенным образом. По излучению радиосигнала запросчика и приему ретранслированного сигнала наземным ретранслятором измеряют совместно запаздывание и частотный сдвиг ретранслированного сигнала. По этим измерениям определяют наклонную дальность и радиальную скорость полета на ретранслятор. При этом радиосигнал запросчика кодируют дальномерным кодом, а координаты и вектор скорости определяют с учетом полученной наклонной дальности и радиальной скорости. Полученные данные используют для управления летательным аппаратом. Обеспечивается повышение точности наведения летательного аппарата и безопасности маневров захода и посадки. 2 з.п. ф-лы, 5 ил.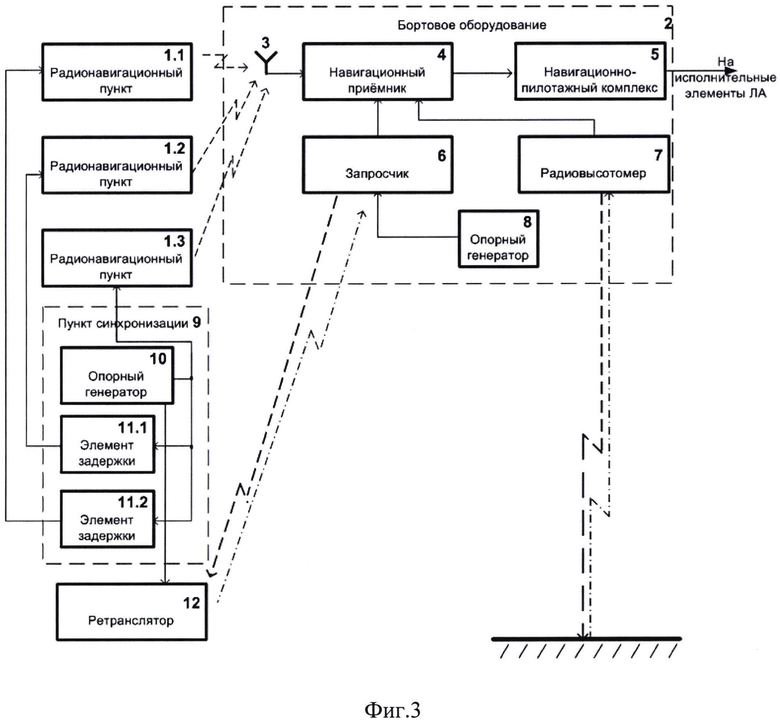
1. Способ авиационной ближней радионавигации, включающий измерение высоты полета летательного аппарата и скорости ее изменения с помощью бортовых средств измерения высоты, формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника, по заданному дальномерному коду разделение принятых сигналов, измерение радионавигационных параметров: моментов прихода и частоты радиосигналов с учетом неопределенности этих параметров, определение навигационных параметров: псевдодальностей и псевдорадиальных скоростей, определение в горизонтальной плоскости по навигационным параметрам с учетом измеренной высоты полета координат летательного аппарата и дополнительно, с учетом скорости изменения высоты, вектора скорости, управление полетом по полученным координатам и вектору скорости соответствующим изменением последнего, отличающийся тем, что формируют радионавигационное поле по меньшей мере тремя радионавигационными пунктами, расположенными на земной поверхности в окрестности аэродрома, дополнительно с помощью бортового запросчика и наземного ретранслятора по излучению радиосигнала запросчика измеряют совместно запаздывание и частотный сдвиг ретранслированного сигнала, по этим измерениям определяют наклонную дальность и радиальную скорость полета на ретранслятор, при этом радиосигнал запросчика кодируют дальномерным кодом, а координаты и вектор скорости определяют с учетом полученной наклонной дальности и радиальной скорости.
2. Способ авиационной ближней радионавигации по п. 1, отличающийся тем, что радионавигационные пункты расположены в вершинах правильного многоугольника, центр которого совмещен с центром взлетно-посадочной полосы аэродрома, а ретранслятор территориально совмещен с одним из радионавигационных пунктов.
3. Способ авиационной ближней радионавигации по пп. 1, 2, отличающийся тем, что излучают запросчиком радиосигнал в заданный для каждого летательного аппарата момент времени из условия отсутствия на интервале времени от момента начала излучения радиосигнала до завершения приема ретранслированного радиосигнала излучений запросчиков других летательных аппаратов.
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2386176C2 |
| US 8886373 B2, 11.11.2014. | |||

