ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству и способу получения и обработки показаний измерений, включающих по меньшей мере компонент, представляющий физический феномен в живых существах. Изобретение также относится к компьютерной программе для реализации указанного способа.
УРОВЕНЬ ТЕХНИКИ
Традиционные датчики для измерения физического феномена, такого как оксигенация крови, обычно предназначены для непосредственного использования на одной части тела. Например, датчики выполнены в виде прищепочных пальцевых, прищепочных ушных, лобных датчиков, прищепочных датчиков на пальцах ног или голеностопных датчиков, которые содержат инфракрасные источники света и детекторы инфракрасного излучения. Эти датчики имеют такую форму, что они превосходно приспособлены для соответствующей части тела. Каждая часть тела имеет различное отражение света и/или светопропускающие характеристики из-за внутренней структуры кожи, например, более толстая кожа на ногах, чем на лице, ведет к более высокой амплитуде измерений физического феномена на лице, чем на ногах. Чтобы преодолеть эти различия, используют предварительно заданные калибровочные кривые, причем калибровочные кривые адаптированы для части тела, на которой произведено измерение. Правильную калибровочную кривую можно легко выбирать для датчиков, описанных выше, так как датчики очевидно предназначены для указанной части тела. После выбора правильной калибровочной кривой, измеренные значения вычисляют из исходного сигнала, полученного посредством традиционного датчика с использованием выбранной калибровочной кривой.
При мониторинге показателей жизнедеятельности на основе камеры, физические феномены можно ненавязчиво измерять на расстоянии. Проблема состоит в том, что при мониторинге показателей жизнедеятельности на основе камеры нельзя на основе различных конструкций датчиков сделать вывод о том, какую часть тела фактически измеряют. Таким образом, конкретные калибровочные кривые не могут быть выбраны непосредственно. Однако независимая корректировка части тела не дает точности, требуемой работниками здравоохранения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление способа, устройства и компьютерной программы указанных выше типов, что делает возможным измерение физического феномена живого существа с расстояния и вывод точного выходного сигнала, представляющего физический феномен живого существа.
В первом аспекте настоящего изобретения представлено устройство для получения и обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, которое содержит датчик для получения на расстоянии показаний измерений по меньшей мере от одной части тела живого существа, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, идентификационный блок для идентификации по меньшей мере одной части тела живого существа, извлекающий блок для извлечения по меньшей мере одного первого сигнала из показаний измерений, который представляет по меньшей мере компонент, представляющий физический феномен, оценочный блок для получения предварительно определенной корректировочной информации в соответствии с по меньшей мере одной идентифицированной частью тела, и корректирующий блок для коррекции по меньшей мере одного первого сигнала в соответствии с корректировочной информацией и для генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа.
В дополнительном аспекте настоящего изобретения представлен способ получения и обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, включающий стадии получения на расстоянии показаний измерений от по меньшей мере одной части тела живого существа, содержащих по меньшей мере компонент, представляющий физический феномена в живом существе, идентификации по меньшей мере одной части тела живого существа, извлечения по меньшей мере одного первого сигнала из показаний измерений, представляющего по меньшей мере компонент, представляющий физический феномен, получения предварительно определенной корректировочной информации в соответствии с по меньшей мере одной идентифицированной частью тела, корректировки по меньшей мере одного первого сигнала в соответствии с корректировочной информацией, и генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа.
В дополнительном аспекте настоящего изобретения представлен процессор для обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, содержащий интерфейс для приема показаний измерений по меньшей мере одной части тела живого существа, полученных на расстоянии и содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, блок идентификации для идентификации по меньшей мере одной части тела живого существа, извлекающий блок для извлечения по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен, оценочный блок для получения предварительно определенной корректировочной информации в соответствии с по меньшей мере одной идентифицированной частью тела и корректирующий блок для корректировки по меньшей мере одного первого сигнала в соответствии с корректировочной информацией и для генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа.
В дополнительном аспекте настоящего изобретения представлен способ обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, включающий стадии получения показаний измерений с по меньшей мере одной части тела живого существа, полученных на расстоянии и содержащих по меньшей мере компонент, представляющий физический феномен в живом существе, идентификации по меньшей мере одной части тела живого существа, извлечения по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен, получения предварительно определенной корректировочной информации в соответствии с по меньшей мере одной идентифицированной частью тела, корректировки по меньшей мере одного первого сигнала в соответствии с корректировочной информацией и генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа, которая содержит средства программного кода, чтобы управлять компьютером для того, чтобы осуществлять стадии способа, описанные выше, когда указанную компьютерную программу исполняют на компьютере.
Настоящее изобретение основано на идее идентификации части тела из показаний измерений, полученных на расстоянии посредством датчика. Основываясь на идентифицированных частях тела, адаптированную корректировочную информацию можно выбирать и применять к соответствующим сигналам, чтобы предоставить точный выходной сигнал.
Датчик получает значения измерений на расстоянии от живого существа. Датчик может быть, например, камерой. В целом, можно использовать любой вид датчика, который предоставляет значения измерений, в частности данные изображения, из которых можно извлекать по меньшей мере один первый сигнал. Кроме того, множество датчиков можно использовать для получения показаний измерений. Например, различные блоки, например, идентификационный блок и извлекающий блок, могут получать показания измерений с различных датчиков. Различные датчики можно также различать по их положению и/или их спецификации. Например, их можно использовать для получения показаний измерений под разными углами и/или с разной длиной волны света. Таким образом, предоставляют больше информации для исследования живого существа, так что точность исследования можно улучшать. Таким образом, показания измерений можно получать очень легко и без дискомфорта для живого существа. Под термином живое существо понимают предпочтительно человека, например, пациента. Альтернативно, изобретение можно использовать для других живых существ, таких как животные. Кроме того, поскольку датчик в целом не прикреплен к телу живого существа, нет необходимости в определенной геометрической форме датчика для частей тела. Следовательно, исходя из типа датчика, непосредственно не известно, какую часть тела фактически измеряют. Что более важно, посредством получения показаний измерений с расстояния, показания измерений можно получать от множества частей тела одновременно, что приводит к множеству компонентов, представляющих физический феномен, включенных в показания измерений. Предпочтительными частями тела являются лицо, плечи, ноги, кисти рук, стопы, ладони, пальцы рук и/или ног.
Идентификационный блок идентифицирует по меньшей мере одну часть тела, с которой снимают показания измерений. Он может генерировать по меньшей мере одну метку идентификационных данных, определяя идентифицированную часть тела для дальнейшего использования.
Этого можно достигнуть, например, посредством использования способов обнаружения объекта для датчиков, передающих изображения, для того, чтобы обнаруживать и выбирать одну или несколько частей тела, основываясь на показаниях измерений. Подходящий детектор частей тела для датчиков, передающих изображения, описан в «Robust Realtime Object Detection», Viola, Paul; Jones, Michael; Vancouver, Canada, 2001. Описана базовая система разработки для визуального обнаружения объекта, которая способна быстро обрабатывать изображения, в то же время достигая высоких показателей обнаружения. Это основано на представлении изображения под названием «интегральное изображение», позволяющего быструю обработку данных. Кроме того, используют алгоритм обучения, который выбирает небольшое количество критических визуальных признаков и создает эффективные классификаторы. Наконец, классификаторы комбинируют в «каскад», который позволяет отбросить фоновые области изображения. Этот алгоритм является особенно подходящим для обнаружения лица человека как части тела.
В одном из вариантов осуществления идентификацию части тела можно реализовать, основываясь на эвристике. Тем самым можно использовать такие способы обработки изображений, как обнаружение контуров и цветовая сегментация.
В дополнительном варианте осуществления идентификация части тела основана на трехмерной информации о теле. Трехмерную информацию можно получать отдельно, например, посредством 3D-камеры или системы стереовидения. Альтернативно, датчик может быть выполнен в виде 3D-камеры или в виде системы стереовидения.
В еще одном дополнительном варианте осуществления используют набор предварительно подготовленных детекторов частей тела для идентификации частей тела. Каждый детектор подготавливают для идентификации определенной части тела, например, лица, кисти руки, плеча или стопы. Когда показания измерений исследованы с помощью детекторов частей тела, создают метку посредством детектора объекта, который дает самую быструю реакцию. Когда изображения получают как показания измерений, детекторы частей тела могут исследовать изображение секциями и присваивать метки каждой секции по отдельности.
В еще одном дополнительном варианте осуществления, применяют обнаружение частей тела с использованием ручной инициализации пользователем и обучения методике обнаружения частей тела в режиме онлайн. Такая методика описана в «Online learning of robust object detectors during unstable tracking», Kalal et al, Kyoto, Japan, 2009. Обучение обнаружению частей тела в режиме онлайн имеет преимущество в том, что оно в состоянии обеспечивать обнаружение, которое приспособлено к текущей окружающей обстановке, например, к условиям освещения, а также к части тела, которую измеряют, например, к деформации частей тела.
Для дальнейшего улучшения идентификации частей тела, контекстная информация также может учитываться идентификационным блоком. Например, модели тела можно использовать в качестве контекстной информации. Основываясь на контекстной модели, ложные идентификаторы можно удалить, например, стопа никогда не может быть присоединена к голове.
Предлагаемый извлекающий блок извлекает по меньшей мере один первый сигнал из показаний измерений. По меньшей мере один первый сигнал представляет физический феномен, который подлежит измерению. Он предпочтительно связан с одной точкой измерения на одной части тела живого существа. Извлечение по меньшей мере одного первого сигнала из показаний измерений предпочтительно выполняют, основываясь на информации, полученной посредством частей тела, идентифицированных как описано выше. Например, извлечение можно выполнять посредством по меньшей мере одного из способов, описанных в «Noncontact simultaneous dual wavelength photoplethysmography: A further step toward noncontact pulse oximetry», Humphreys et al, Review of scientific instruments 78, 2007; или «Pulse Oxigraphy - And other new in-depth perspectives through the near infrared window», Wieringa, 2007. Как результат, извлекают один первый сигнал или множество первых сигналов.
Кроме того, оценочный блок получает корректировочную информацию, основываясь на частях тела, идентифицированных идентификационным блоком. Корректировочная информация о корректировке предпочтительно является предварительно определенной информацией. Она может храниться в накопителе данных устройства. В этом случае оценочный блок считывает корректировочную информацию с этого накопителя данных согласно меткам, определенным посредством идентифицированных частей тела.
Корректирующий блок корректирует по меньшей мере один первый сигнал, основываясь на корректировочной информации о корректировке, полученной из оценочного блока. Если извлекают только один первый сигнал или используют только один первый сигнал, выходной сигнал генерируют непосредственно посредством корректировки первого сигнала. Если множество первых сигналов идентифицированы, эти первые сигналы корректируют отдельно, используя соответствующую корректировочную информацию.
Предпочтительно реализовывать идентификационный блок, извлекающий блок, оценочный блок и корректирующий блок как один или несколько микропроцессоров, например, в качестве персонального компьютера или рабочей станции.
Следовательно, изобретение предусматривает устройство и способ, которые позволяют генерировать высокоточный выходной сигнал, представляющий физический феномен живого существа.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет схожие и/или идентичные предпочтительные варианты осуществления в виде заявленного устройства и как определено в зависимых пунктах формулы изобретения.
В одном из вариантов осуществления изобретения физическим феноменом является оксигенация крови, пульс, кровяное давление, вариабельность частоты сердечных сокращений, частота дыхательных движений, глубина анестезии и/или гипо- и гиперволемия, т.е. устройство и способ в соответствии с настоящим изобретением в целом способны извлекать соответствующие показатели жизнедеятельности (также называемые биометрическими сигналами). В этом варианте осуществления измеряют по меньшей мере один конкретный физический феномен. В зависимости от физического феномена, который подлежит измерению, должны быть предусмотрены различные способы извлечения. Так, например, пульс, вариабельность частоты сердечных сокращений и частота дыхательных движений являются периодическими феноменами. Эти феномены можно извлекать посредством способов извлечения для периодических изменений в показаниях измерений. Феномены оксигенации крови и кровяного давления не обязательно относятся к периодическому типу. Таким образом, необходим более статический способ извлечения. Благоприятно, что изобретение относится к единственному способу исправления первых сигналов для этих различных видов измеренных физических феноменов на основе той же концепции. Также благоприятно, что несколько феноменов можно измерять с помощью того же устройства, посредством замены способа извлечения и/или предоставления нескольких способов извлечения схожим образом. Это ведет к очень экономически эффективному устройству и способу.
В дополнительном варианте осуществления датчик является видеокамерой. В этом варианте осуществления видеокамеру используют для получения показаний измерений. Таким образом, показания измерений представляют последовательность изображений. Видеокамера может быть цифровой видеокамерой традиционного типа. Возможно получать показания измерений из всего видимого спектра света. Альтернативно, видеокамеру можно адаптировать к более узкому диапазону длин волн или к конкретным длинам волн, которые имеют отношение к физическому феномену, подлежащему измерению, как, например, инфракрасная камера или камера RGB. В качестве примера, если следует измерять оксигенацию крови, основной интерес представляет комбинация зеленого, красного и инфракрасного диапазона длин волн.
Другой альтернативой для адаптированной видеокамеры является терагерцовая камера. Терагерцовую камеру адаптируют к электромагнитному спектру, который расположен между микроволнами и ближними инфракрасными областями электромагнитного спектра. Эта специализированная камера имеет преимущество измерения через материалы различных типов, например, через одежду.
Кроме того, она измеряет более глубоко через кожу и менее чувствительна к движениям исследуемого живого существа. Следовательно, терагерцовая камера предоставляет очень надежный способ получения показаний измерений высокого качества. Кроме того, в зависимости от применения, дополнительный источник света, имеющий длины волн, используемые для желаемого измерения, можно использовать для улучшения показаний измерений. Преимуществом является то, что такие видеокамеры легко доступны и экономически эффективны. Еще одним преимуществом является то, что показания измерений, полученные посредством видеокамеры, содержат много информации, которую можно анализировать с течением времени, чтобы правильно идентифицировать части тела и адаптировать к изменениям в определенном месте, например, к условиям освещения.
В дополнительном варианте осуществления корректировочной информацией является по меньшей мере одна калибровочная кривая. В этом варианте осуществления каждый первый сигнал корректируют, основываясь на соответствующей предварительно определяемой калибровочной кривой. Калибровочную кривую присваивают идентифицированной части тела и сохраняют в накопителе данных. После того, как часть тела обнаружена, метку, описывающую соответствующую часть тела, получают посредством оценочного блока. Оценочный блок может считывать соответственную калибровочную кривую с накопителя данных, который содержит набор данных о предварительно определенных калибровочных кривых. Преимуществом является то, что калибровочные кривые предоставляют различные значения корректировки, связанные с различными значениями первого сигнала. Это приводит к более точной корректировке по меньшей мере одного первого сигнала. Кроме того, он может быть предназначен для того, чтобы адаптировать калибровочную кривую согласно исследуемому живому существу. Например, калибровочную кривую можно адаптировать вручную посредством сравнения выходного сигнала с измерением физического феномена с другого устройства измерения. Следовательно, можно генерировать очень точно скорректированный по меньшей мере один первый сигнал. Кроме того, использование предварительно заданной калибровочной кривой предпочтительно предоставляет возможность создания калибровки в реальном времени, так как они доступны и очень быстры в применении.
В дополнительном варианте осуществления извлекающий блок адаптируют для извлечения по меньшей мере одного первого сигнала из показаний измерений согласно по меньшей мере одной определенной части тела. В этом варианте осуществления по меньшей мере первый сигнал извлекают, основываясь на информации, полученной посредством идентификационного блока. Информацию об идентифицированной части тела можно использовать для точного извлечения по меньшей мере одного первого сигнала. Например, если была идентифицирована рука на изображении, полученном посредством датчика, сигнал может быть извлечен только из области изображения, где предполагается рука. Кроме того, информацию об этой области можно использовать в следующих изображениях, полученных посредством датчика. Это относится к множеству определенных частей тела. Следовательно, остальная часть изображения, не представляющая какие-либо части тела, может быть отброшена, соответственно, предотвращая артефакты в первом сигнале. Преимуществом является то, что по меньшей мере один первый сигнал можно извлекать с высокой точностью. Кроме того, этот вариант осуществления повышает надежность извлечения.
В дополнительном варианте осуществления идентификационный блок адаптируют для оценки движения по меньшей мере одной идентифицированной части тела и извлекающий блок адаптируют для извлечения по меньшей мере одного первого сигнала в соответствии с предполагаемыми движениями. В этом варианте осуществления движения живого существа принимают во внимание для идентификации частей тела и извлечения по меньшей мере одного первого сигнала. Движения живого существа, подлежащие исследованию, могут вести к неясным показаниям измерений. После определения части тела, его движения можно отслеживать, чтобы адаптировать извлечение. Следовательно, получают качественно улучшенный по меньшей мере один первый сигнал, в котором сокращены артефакты. Кроме того, возможно отслеживать полное движение живого существа для надежной реализации способа, устойчивой ко всему движению. Например, можно реализовать компенсацию общего движения. Альтернативно или дополнительно, основываясь на модели тела, можно оценить, что предварительно идентифицированную часть тела перемещают из области датчика посредством оценки движений и/или что другую часть тела перемещают в область датчика посредством оценки движений.
Кроме того, идентификационный блок можно адаптировать для идентификации положения по меньшей мере одной идентифицированной части тела. Положение частей тела может повлиять на показания измерений. Посредством идентификации положения, дополнительная информация может быть учтена посредством извлекающего блока, оценочного блока и/или корректирующего блока. Дополнительная информация, например, может быть связана с условиями освещения части тела, которые меняются в зависимости от ее положения или с наложением частей тела, где области одной части тела накрыты другой частью тела. Положение может быть описано, например, с помощью трехмерной модели по меньшей мере одной части тела живого существа.
В дополнительном варианте осуществления анализирующий блок предоставляет для сравнения по меньшей мере два первых сигнала, представляющих компонент, представляющий физический феномен, от различных частей тела живого существа. В этом варианте осуществления дополнительно используют возможность измерения нескольких частей тела одновременно. Физически нормальным является получение различных показания измерений от разных частей тела одного живого существа. Посредством сравнения первых сигналов после их корректировки можно получать дополнительную информацию о живом существе. Если, например, по существу различные первые сигналы получают от разных ног, можно делать предположение о том, что присутствует патологическая разница, например, основанная на тромбозе.
В дополнительном варианте осуществления блок анализа адаптируют для определения разности между по меньшей мере двумя первыми сигналами и для генерации сообщающего сигнала, если разность превышает пороговое значение. В этом варианте осуществления скорректированные первые сигналы от различных частей тела сравнивают посредством вычисления их разности. Если разность между сигналами превышает предварительно определяемый порог, предполагают нарушение и генерируют сообщающий сигнал. Сообщающий сигнал может, например, быть акустическим или оптическим сигналом, сообщая пользователю о присутствии нарушения. Кроме того, предпочтительно, если о соответственных частях тела также сообщают пользователю посредством сообщающего сигнала. Таким образом, пользователю устройства сообщают, что, в конечном итоге, нарушение присутствует и где предполагают это нарушение. Основываясь на этой информации, пользователь может очень быстро исследовать живое существо. Кроме того, предпочтительно использовать различные пороговые значения, которые адаптируют к различным парам первых сигналов различных частей тела, ведущих к более высокой точности сообщающего сигнала.
В дополнительном варианте осуществления блок корректировки адаптируют к генерации выходного сигнала, основываясь по меньшей мере на двух первых сигналах. В этом варианте осуществления выходной сигнал генерируют в соответствии с множеством скорректированных первых сигналов. Одним из основных преимуществ патентоспособной идеи является то, что можно получать множество первых сигналов, которые после корректировки должны быть по существу идентичными. Посредством отбора скорректированных первых сигналов и/или их объединения, выходной сигнал можно генерировать с особенно высокой точностью. Отбор можно осуществлять, например, посредством отбрасывания первых сигналов частей тела, которые не подходят для получения показаний измерений.
В дополнительном варианте осуществления блок корректировки адаптируют для определения качества по меньшей мере двух первых сигналов и для выбора по меньшей мере одного первого сигнала, основываясь на качестве. В этом варианте осуществления качество по меньшей мере двух первых сигналов и/или скорректированных первых сигналов определяют для того, чтобы выбирать по меньшей мере один подходящий скорректированный первый сигнал для генерации выходного сигнала. Качество может быть оценено, например, исходя из соотношения шума к сигналу, из времени, за которое соответственную часть тела можно получать посредством датчика, из количества движения, обнаруженного в части тела, которая находится под контролем, величины градиента, количества цветовых вариаций и/или уровня освещенности части тела, которая находится под контролем. Возможно генерировать выходной сигнал посредством отбора одного первого скорректированного сигнала самого высокого качества. Преимуществом является то, что выходной сигнал основан по меньшей мере на одном первом сигнале с самым высоким доступным качеством, что приводит к очень высокому качеству выходного сигнала.
В дополнительном варианте осуществления блок корректировки адаптируют для объединения по меньшей мере двух первых сигналов для генерации выходного сигнала. В этом варианте осуществления выходной сигнал генерируют, основываясь по меньшей мере на двух первых сигналах. Предпочтительно объединять скорректированные первые сигналы согласно различным частям тела. Таким образом, генерируют очень точный выходной сигнал. Дополнительно, первые сигналы можно выбирать согласно минимальному качеству, причем объединяют только скорректированные первые сигналы минимального качества. Кроме того, благоприятно применять фазовый сдвиг к первым скорректированным сигналам, характерным для соответственных частей тела. Как, например, пульсация, измеренная на руке, будет слегка опережать такую же пульсацию, измеренную на стопе из-за разных расстояний до сердца, что ведет к различному времени распространения пульсовой волны. Скорректированные первые сигналы могут быть объединены различными способами. Они могут быть объединены, например, посредством арифметического усреднения. Это ведет к очень быстрому подходу, который несет малую вычислительную нагрузку. Кроме того, возможно взвешенное усреднение. Взвешивание можно выполнять, например, посредством использования показателя качества согласно качеству по меньшей мере одного первого сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты настоящего изобретения будут очевидны и объяснены со ссылкой на вариант(ы) осуществления, описанные далее в настоящем документе. На следующих чертежах:
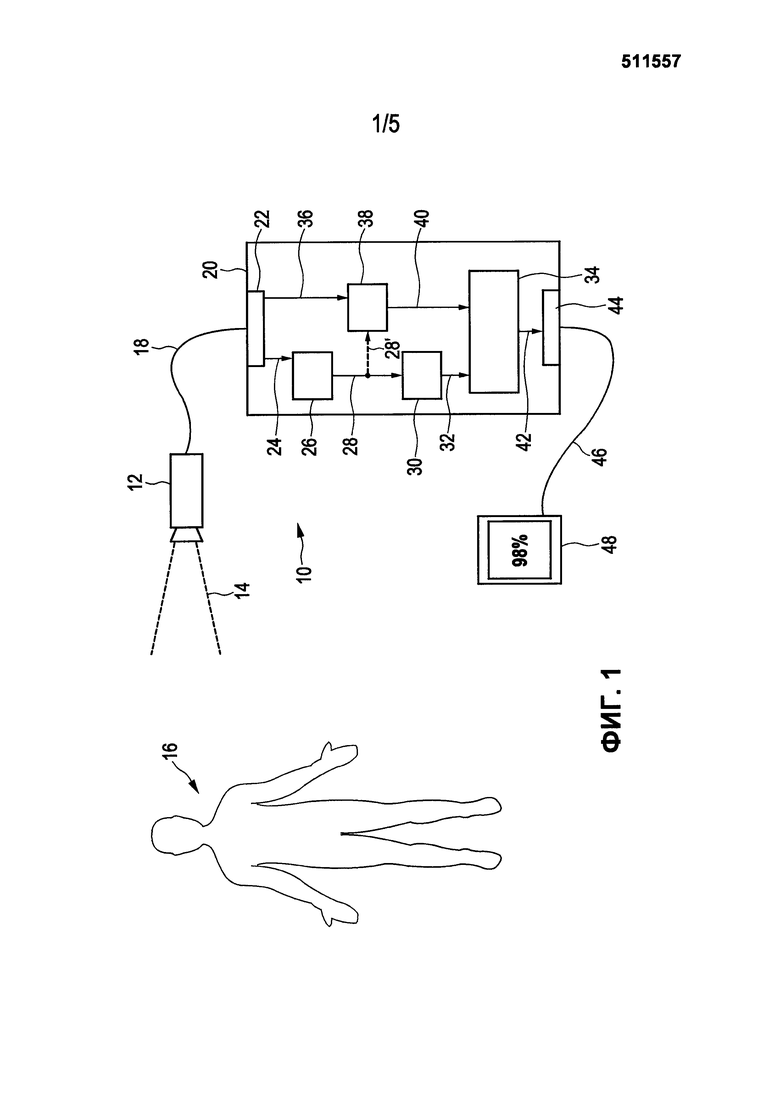
на фиг.1 представлена схема первого варианта осуществления устройства в соответствии с изобретением,
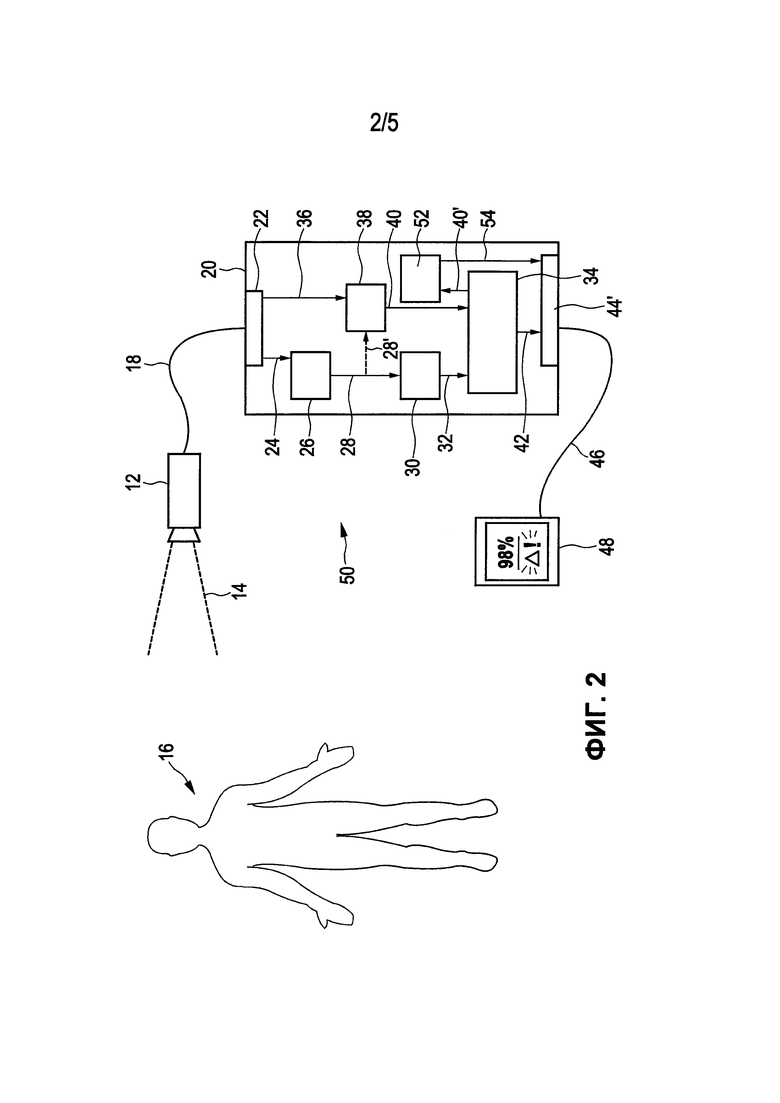
на фиг.2 представлена схема второго варианта осуществления устройства в соответствии с изобретением, которое содержит анализирующий блок,
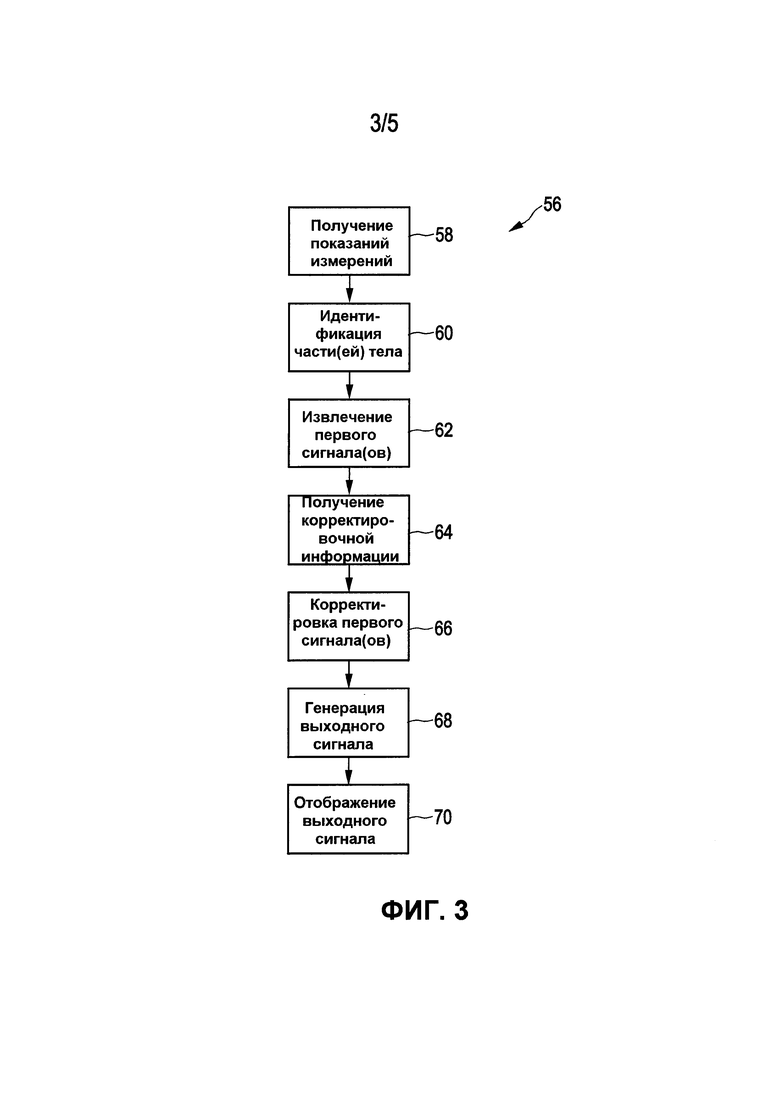
на фиг.3 представлена блок-схема, иллюстрирующая первый вариант осуществления способа в соответствии с изобретением,
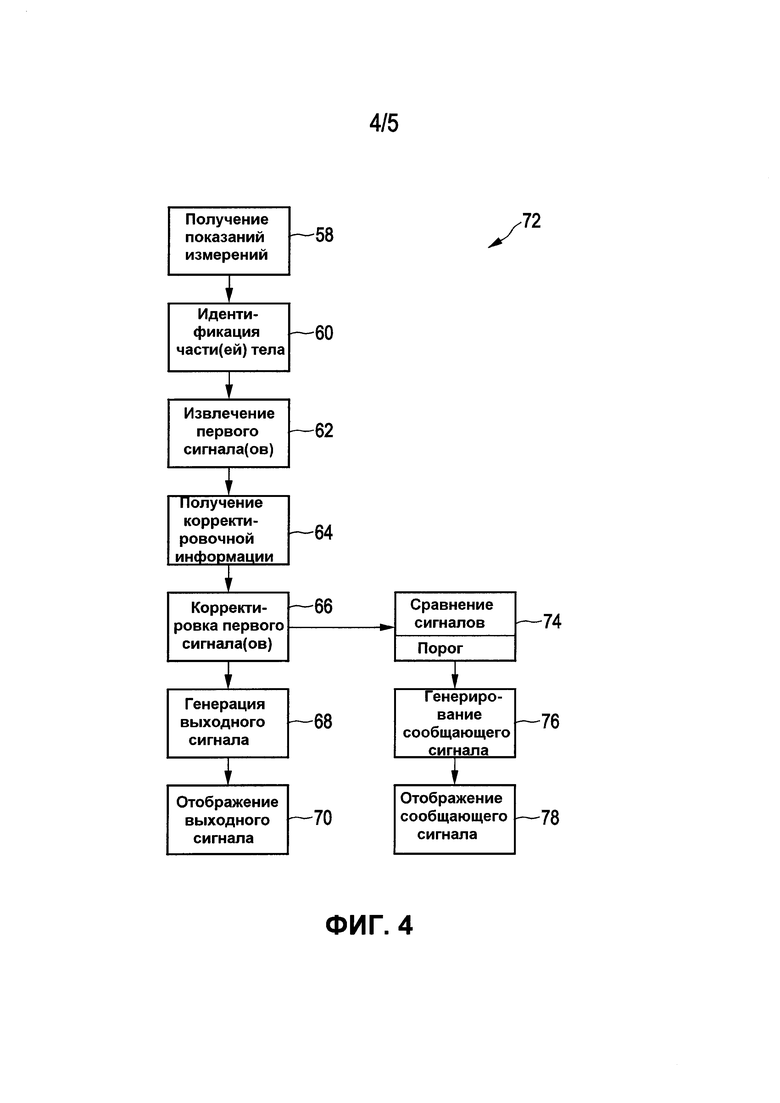
на фиг.4 представлена блок-схема, иллюстрирующая второй вариант осуществления способа в соответствии с изобретением, и
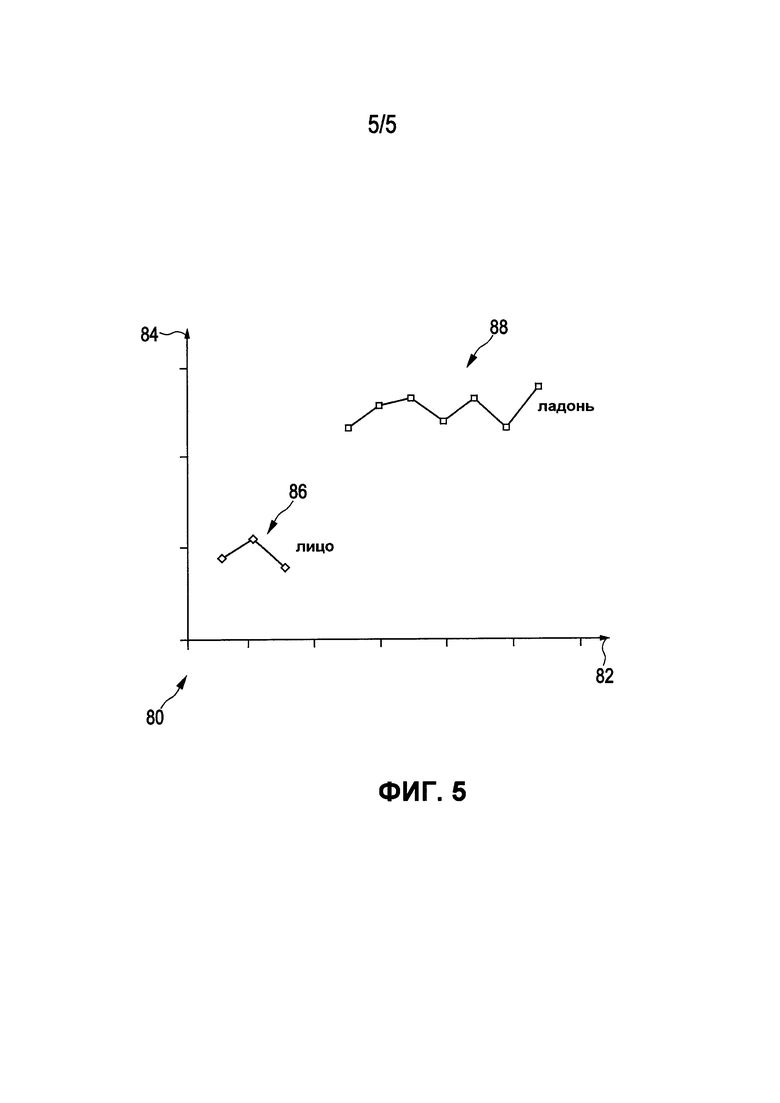
на фиг.5 представлена диаграмма, иллюстрирующая корректировочную информацию для различных частей тела.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 представлен первый вариант осуществления устройства 10 в соответствии с настоящим изобретением. Устройство 10 содержит видеокамеру 12 в качестве датчика. Видеокамера 12 имеет область 14 датчика, где можно получать показания измерений от человека 16. Область 14 датчика может включать в себя человека 16 в целом или только части человека 16. Показания измерений, полученные посредством видеокамеры 14, выполнены в форме последовательности изображений, имеющих компонент, представляющий физический феномен человека. В дальнейшем изобретение в качестве примера описано для оксигенации крови в качестве физического феномена, который подлежит измерению. Следует понимать, что это не ограничивает изобретение. Другими физическими феноменами, которые можно предпочтительно измерять посредством изобретения, являются например, пульс, вариабельность частоты сердечных сокращений, кровяное давление, частота дыхательных движений, глубина анестезии и/или гипо- и гиперволемия. Последовательность изображений передают через линию 18 к процессору 20 устройства 10.
Процессор 20 содержит интерфейс 22 для приема показаний измерений. В процессоре 20 показания измерений передают, как показано стрелкой 24, на идентификационный блок 26. Идентификационный блок 26 анализирует показания измерений для идентификации по меньшей мере одной части тела человека 16, подходящей для измерения физического феномена. Частью тела может быть, например, лицо, плечо, кисть руки, нога, ступня, палец ноги и/или большой палец. Идентификацию осуществляют посредством алгоритма обнаружения объекта, выполненного в идентификационном блоке 10, для обнаружения частей тела на изображениях. После идентификации по меньшей мере одной части тела, идентификационный блок 26 генерирует метки данных с информацией, которая идентифицирует по меньшей мере одну часть тела, например, «палец правой ноги». Эту информацию передают, как указано стрелкой 28, в оценочный блок 30. Оценочный блок 30 содержит накопитель данных, где сохраняют калибровочные кривые. Основываясь на информации, отправленной посредством идентификационного блока 26, оценочный блок 30 проводит отбор соответственных калибровочных кривых из накопителя данных и передает их, как показано стрелкой 32, на корректирующий блок 34.
Начиная еще раз с интерфейса 22, показания измерений также передают, как указано стрелкой 36, в извлекающий блок 38. Извлекающий блок 38 извлекает по меньшей мере один первый сигнал из полученных показаний измерений. Поскольку показания измерений являются изображениями, этого достигают посредством алгоритмов обработки изображений. Например, может быть желательным сначала найти подходящие точки измерений на изображениях, предпочтительно посредством поиска пикселей телесного цвета. Затем эти точки измерений анализируют для извлечения по меньшей мере первого сигнала. В случае оксигенации крови, чтобы получить ряд значений для оксигенации крови, оценивают цвет кожи. Как показано на фиг.1 информация об идентифицированных частях тела может быть дополнительно передана, как указано стрелкой 28', в извлекающий блок 38. Извлекающий блок 38 может использовать эту информацию для повышения качества извлеченного по меньшей мере одного первого сигнала. В частности, идентификационный блок 26 может идентифицировать по меньшей мере одну область в последовательности изображений, где находится по меньшей мере одна часть тела, которая подлежит измерению. Эту область передают в извлекающий блок 38, например, в качестве «маски», определяя области, где извлекающий блок 38 должен извлекать соответствующий первый сигнал. Таким образом, первый сигнал, который извлекают, основываясь на этой информации, может быть легко связан с соответствующей калибровочной кривой из оценочного блока 30. После извлечения по меньшей мере одного первого сигнала, его передают через стрелку 40 на корректирующий блок 34. В корректирующем блоке 34 каждый первый сигнал корректируют согласно присвоенной калибровочной кривой, отобранной посредством оценочного блока 30. Каждую калибровочную кривую присваивают соответствующему ей первому сигналу, основываясь на части тела, к которой они относятся. Затем калибровочную кривую применяют с соответствующим первым сигналом, генерируя скорректированный первый сигнал.
Если генерируют только один скорректированный первый сигнал, корректировочный блок выводит скорректированный первый сигнал в качестве выходного сигнала. Если генерируют множество скорректированных первых сигналов, корректировочный блок 34 генерирует выходной сигнал, основываясь на множестве скорректированных первых сигналов. Это выполняют посредством отбора и/или объединения скорректированных первых сигналов.
Выходной сигнал передают, как указано стрелкой 42, на выходной интерфейс 44. Выходной интерфейс 44 соединен с линией 46, передающей выходной сигнал на дисплей 48. Дисплей 48 отображает значение выходного сигнала, представляющего физический феномен. В этом случае оксигенация крови составляет 98%.
На фиг.2 представлен второй вариант осуществления устройства 50 в соответствии с настоящим изобретением. Устройство 50 содержит такие же компоненты, как устройство 10 на фиг.1. Кроме того, устройство 50 содержит анализирующий блок 52. Анализирующий блок 52 получает скорректированный по меньшей мере один первый сигнал, как показано стрелкой 40. Если передают множество скорректированных первых сигналов, скорректированные первые сигналы сравнивают друг с другом посредством расчета их разности. Предпочтительно этого достигают в парах скорректированных первых сигналов, где каждый первый сигнал представляет собой физический феномен в другой части тела. Кроме того, рассчитанные разности сравнивают с пороговым значением. Пороговое значение является предварительно определенным пороговым значением и хранится в накопителе данных анализирующего блока 52. Если по меньшей мере одна из разностей превышает пороговое значение, то генерируют сообщающий сигнал. Сообщающий сигнал передают на выходной интерфейс 44', как показано стрелкой 54. Выходной интерфейс 44' выводит сообщающий сигнал в дополнение к выходному сигналу через линию 46 на дисплей 48. Основываясь на сообщающем сигнале, на дисплее 48 отображают дополнительную информацию, которая указывает на повышенную разность между по меньшей мере двумя первыми скорректированными сигналами.
На фиг.3 представлена блок-схема 56 по первому варианту осуществления способа в соответствии с настоящим изобретением. Стадии блок-схемы 56 объяснены с учетом варианта реализации устройства 10, представленного на фиг.1.
Способ начинается на первой стадии 58. На стадии 58 получают показания измерений. Как показано на фиг.1 показания измерений получают посредством видеокамеры 12 в виде последовательности изображений. Эти изображения затем передают в процессор 20.
На следующей стадии 60 идентифицируют по меньшей мере одну часть тела наблюдаемого живого существа. Идентификационный блок 26 осуществляет эту стадию 60. Поскольку показания измерений являются изображениями, идентификацию можно выполнять посредством алгоритмов обработки изображений, например, таких как алгоритмы распознавания объектов. Полученная информация о частях тела может представлять собой существование определенной части тела на изображениях, местоположение части тела на изображениях, информацию о движении части тела и конкретный вид части тела. Затем эту информацию предоставляют для дальнейших стадий способа.
На следующей стадии 62 по меньшей мере один первый сигнал извлекают из последовательности изображений. Количество первых сигналов зависит от количества точек измерения на изображениях. Можно извлекать только один общий первый сигнал, основываясь на изображениях. Однако предпочтительно извлекать по меньшей мере один первый сигнал для каждой идентифицированной части тела, чтобы обеспечить как можно больше первых сигналов от различных измерительных точек. Информацию о местоположении частей тела на изображениях, полученных на стадии 60, можно использовать для определения измерительных точек на изображениях.
На следующей стадии 64 получают калибровочную информацию. На этой стадии оценочный блок 30 использует информацию о том, какая по меньшей мере одна часть тела идентифицирована, чтобы выбирать по меньшей мере одну соответственную калибровочную кривую на накопителе данных. Таким образом, для каждой идентифицированной части тела предоставляют соответствующий первый сигнал и соответствующую калибровочную кривую.
На следующей стадии 66 корректируют по меньшей мере один первый сигнал. На этой стадии корректирующий блок 34 принимает по меньшей мере одну калибровочную кривую, полученную на стадии 64, и по меньшей мере один первый сигнал, полученный на стадии 62. Калибровочную кривую применяют к соответствующему первому сигналу, основываясь на части тела, которой она присвоена, где генерируют по меньшей мере один первый скорректированный сигнал.
На следующей стадии 68 выходной сигнал генерируют, основываясь на по меньшей мере одном скорректированном первом сигнале. Если получен только один скорректированный первый сигнал, этот один скорректированный первый сигнал используют непосредственно в качестве выходного сигнала. Если присутствует множество скорректированных первых сигналов, выходной сигнал генерируют, основываясь на отборе по меньшей мере одного из скорректированных первых сигналов и/или на основе объединения по меньшей мере двух первых скорректированных сигналов. Отбор можно реализовать посредством определения качества каждого первого сигнала или скорректированного первого сигнала. Качество можно определять посредством известных способов, основываясь на соотношении шума к сигналу, из времени, за которое соответственную часть тела можно получать посредством видеокамеры, исходя из количества движения, обнаруженного в части тела, которая находится под контролем, величины градиента, количества цветовых вариаций и/или уровня освещенности части тела, которая находится под контролем. На основе качества, выбирают по меньшей мере один первый сигнал, который используют в качестве выходного сигнала. Если отбор не выполнен или если множество скорректированных первых сигналов остается после отбора, остальные скорректированные первые сигналы объединяют для того, чтобы генерировать один выходной сигнал. Посредством объединения множества скорректированных первых сигналов генерируют очень точный выходной сигнал, который основан на комбинированных показаниях от множества исследуемых частей тела. Дополнительно, объединение имеет то преимущество, что если живое существо двигается относительно видеокамеры, этот один выходной сигнал можно генерировать изнутри, основываясь на изменении частей тела на получаемых изображениях, что ведет к устойчивому значению, подлежащему выводу. Следовательно, объединение приводит к очень надежному подходу. Объединение можно осуществлять посредством таких способов, как арифметическое усреднение или взвешенное усреднение. Взвешенное усреднение может быть взвешено на основе качественных параметров, определенных для отбора, описанного выше. Дополнительно, скорректированные первые сигналы сдвинуты по своей фазе, чтобы предоставлять общую фазу, так как для структуры тела живых существ между различными частями тела возникает фазовый сдвиг физического феномена. Сдвиг можно выполнять согласно предварительно определенным значениям сдвига или посредством установки минимумов и максимумов периодических первых сигналов по отношению друг к другу.
На следующей стадии 70 отображают выходной сигнал для пользователя. На этой стадии выходные сигналы получает дисплей 48, который отображает значения согласно измеренному физическому явлению и согласно выходному сигналу.
Стадии с 58 до 70 предпочтительно повторяют, чтобы обеспечить непрерывное значение, которое отображают пользователю.
На фиг.4 представлена блок-схема 72 второго варианта осуществления способа в соответствии с настоящим изобретением. Блок-схема 72 содержит стадии с 58 до 70 блок-схемы 56 на фиг.3. Дополнительные стадии блок-схемы 72 объяснены с учетом варианта осуществления устройства 50, представленного на фиг.2.
На стадии 74 друг с другом сравнивают множество скорректированных первых сигналов, поступающих со стадии 66. Это выполняют посредством вычисления разности между двумя скорректированными первыми сигналами. Различные разности рассчитывают посредством перекрестных ссылок на различные пары скорректированных первых сигналов. Каждую разницу сравнивают с предварительно определенным пороговым значением, которое считывают с накопителя данных. Предпочтительно, если различные пары из скорректированных первых сигналов определяют пороговым значением, адаптированным к этой конкретной паре. Следовательно, накопитель данных хранит множество пороговых значений, которые присвоены различным парам скорректированных первых сигналов от различных частей тела. Таким образом, достигают избирательного надзора за скорректированными первыми сигналами.
Если по меньшей мере одна разность превышает соответствующее пороговое значение, на этапе 76 генерируют сообщающий сигнал. Сообщающий сигнал затем отображают на следующей стадии 78 для пользователя. Это информирует пользователя о необычной высокой разности, что предполагает физические проблемы. Предпочтительно сообщающий сигнал также сообщает, к каким частям тела он относится, чтобы сообщить пользователю, какие части тела он должен исследовать в первую очередь.
На фиг.5 представлена диаграмма 80, имеющая абсциссу 82, которая описывает значение физического феномена, и ординату 84, которая описывает корректирующее значение для физического феномена. На диаграмме представлена первая группа 86 из трех значений калибровки, которая связана с первым сигналом, который определяет лицо живого существа как часть тела. Кроме того, представлена вторая группа 88 из семи значений калибровки, которая связана с первым сигналом, который определяет ладонь живого существа как часть тела. Значения калибровки каждой группы 86, 88 могут быть взаимосвязаны посредством интерполяции для того, чтобы формировать калибровочные кривые для различных частей тела, обеспечивающих подробную информацию о калибровке в пределах интервала. Оценочный блок 30 выбирает одну из калибровочных кривых соответственно группам калибровочных значений 86 или 88 согласно части тела, идентифицированной посредством идентификационного блока 26. Корректирующий блок 34 затем определяет фактическое значение калибровки, которую надо применить, основываясь на калибровочной кривой и значении первого сигнала, которые надо скорректировать. Наконец, корректирующий блок 30 добавляет фактическое значение калибровки к соответствующему значению первого сигнала для того, чтобы корректировать сигнал.
Несмотря на то, что изобретение иллюстрировано и описано в деталях на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или приведенные в качестве образца и не ограничивающие; изобретение не ограничено описанными вариантами осуществления. специалисты в данной области смогут понять и осуществлять другие вариации раскрытых вариантов осуществления при практическом выполнении описываемого в заявке изобретения, изучив чертежи, раскрытие и прилагаемую формулу изобретения.
В формуле изобретения слово «содержит» не исключает другие элементы или стадии, а формы единственного числа не исключают множество. Один элемент или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные средства перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих средств не может быть использована с пользой.
Компьютерную программу можно хранить/распространять в подходящей долговременной среде, такой как оптический машиночитаемый носитель или твердотельный машиночитаемый носитель, которые поставляются вместе с или в качестве части другого аппаратного обеспечения, а также можно распространять в других формах, например, через интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения ее объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗВЛЕЧЕНИЯ ФИЗИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2653799C2 |
| ИСПОЛЬЗОВАНИЕ УНИКАЛЬНЫХ ИДЕНТИФИКАТОРОВ ДЛЯ ИЗВЛЕЧЕНИЯ ДАННЫХ КОНФИГУРАЦИИ ДЛЯ УСТРОЙСТВ-МЕТОК | 2014 |
|
RU2649756C2 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛА ДАТЧИКОВ ДАВЛЕНИЯ | 2014 |
|
RU2596073C2 |
| КАЛИБРОВКА ДАТЧИКА ДАВЛЕНИЯ ПРИ ВЫПОЛНЕНИИ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА | 2004 |
|
RU2358250C2 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2022 |
|
RU2821773C1 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ СНА | 2014 |
|
RU2677811C2 |
| ДИНАМИЧЕСКАЯ АКУСТИЧЕСКАЯ МОДЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2704746C2 |
| СИСТЕМА ДЛЯ СКРИНИНГА СОСТОЯНИЯ ОКСИГЕНАЦИИ СУБЪЕКТА | 2014 |
|
RU2677765C2 |
| КОРИОЛИСОВ МАССОВЫЙ РАСХОДОМЕР И СПОСОБ ПОЛУЧЕНИЯ ИЗМЕРЕННОГО ЗНАЧЕНИЯ, ПРЕДСТАВЛЯЮЩЕГО МАССОВЫЙ РАСХОД | 2004 |
|
RU2339007C2 |
| ИДЕНТИФИКАЦИЯ УСТРОЙСТВА | 2014 |
|
RU2636802C2 |
Изобретения относятся к медицине. Способ получения и обработки показаний измерений, содержащих компонент, представляющий физический феномен в живом существе, осуществляют с помощью устройства для получения и обработки показаний измерений. При этом получают на расстоянии показания измерений от части тела живого существа, имеющие компонент, представляющий физический феномен в живом существе, с помощью датчика. Идентифицируют часть тела живого существа из полученных значений измерений с помощью идентификационного блока. Извлекают первый сигнал из показаний измерений с помощью извлекающего блока. Получают предварительно определенную информацию о корректировке в соответствии с идентифицированной частью тела из набора данных предварительно определенной корректировочной информации, адаптированной и присвоенной для различных частей тела, с помощью оценочного блока. Корректируют первый сигнал в соответствии с корректировочной информацией и генерируют выходной сигнал, представляющий физический феномен живого существа, с помощью корректирующего блока. Достигается дистанционное измерение физического феномена живого существа и вывод более точного выходного сигнала. 5 н. и 10 з.п. ф-лы, 5 ил.
1. Устройство (10, 50) для получения и обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе (16), содержащее:
- датчик (12) для получения на расстоянии значений измерений по меньшей мере одной части тела живого существа (16), которые имеют по меньшей мере компонент, представляющий физический феномен в живом существе (16);
- идентификационный блок (26) для идентификации по меньшей мере одной части тела живого существа (16) из полученных значений измерений;
- извлекающий блок (38) для извлечения по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен;
- оценочный блок (30) для получения предварительно определенной корректировочной информации (86, 88) в соответствии с по меньшей мере одной идентифицированной частью тела из набора данных предварительно определенной корректировочной информации, адаптированной и присвоенной для различных частей тела, и
- корректирующий блок (34) для корректировки по меньшей мере одного первого сигнала в соответствии с корректировочной информацией (86, 88) и для генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа (16).
2. Устройство по п. 1, причем физическим феноменом является оксигенация крови, пульс, вариабельность частоты сердечных сокращений, кровяное давление, частота дыхательных движений, глубина анестезии и/или гипо- и гиперволемия.
3. Устройство (10, 50) по п. 1, в котором датчик (12) является видеокамерой (12).
4. Устройство (10, 50) по п. 1, в котором корректировочная информация является по меньшей мере одной калибровочной кривой.
5. Устройство (10, 50) по п. 1, в котором извлекающий блок (38) выполнен с возможностью извлечения по меньшей мере одного первого сигнала из показаний измерений в соответствии с по меньшей мере одной идентифицированной частью тела.
6. Устройство (10, 50) по п. 5, в котором идентификационный блок (26) выполнен с возможностью оценки движений по меньшей мере одной идентифицированной части тела и извлекающий блок (38) выполнен с возможностью извлечения по меньшей мере одного первого сигнала в соответствии с предполагаемыми движениями.
7. Устройство (10, 50) по п. 5, дополнительно содержащее анализирующий блок (52) для сравнения по меньшей мере двух первых сигналов, представляющих компоненты, представляющие физический феномен, от различных частей тела живого существа (16).
8. Устройство (10, 50) по п. 1, в котором анализирующий блок (52) выполнен с возможностью определения разности между по меньшей мере двумя первыми сигналами и для генерации сообщающего сигнала, если разность превышает пороговое значение.
9. Устройство (10, 50) по п. 5, в котором корректировочный блок (34) выполнен с возможностью генерации выходного сигнала, основываясь по меньшей мере на двух первых сигналах.
10. Устройство (10, 50) по п. 9, в котором корректировочный блок (34) выполнен с возможностью определения качества по меньшей мере двух первых сигналов и для выбора по меньшей мере одного первого сигнала, основываясь на качестве.
11. Устройство (10, 50) по п. 9, в котором корректировочный блок (34) выполнен с возможностью объединения по меньшей мере двух первых сигналов для генерации выходного сигнала.
12. Способ получения и обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе (16), включающий стадии:
- получение на расстоянии показаний измерений от по меньшей мере одной части тела живого существа (16), имеющих по меньшей мере компонент, представляющий физический феномен в живом существе (16);
- идентификация по меньшей мере одной части тела живого существа (16) из полученных значений измерений;
- извлечение по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен;
- получение предварительно определенной информации (86, 88) о корректировке в соответствии с по меньшей мере одной идентифицированной частью тела из набора данных предварительно определенной корректировочной информации, адаптированной и присвоенной для различных частей тела;
- корректировка по меньшей мере одного первого сигнала в соответствии с корректировочной информацией (86, 88); и
- генерация по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа (16).
13. Процессор (20) для обработки показаний измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе (16), содержащий:
- интерфейс (22) для приема значений измерений по меньшей мере одной части тела живого существа (16), полученных на расстоянии и имеющих по меньшей мере компонент, представляющий физическое явление в живом существе (16);
- идентификационный блок (26) для идентификации по меньшей мере одной части тела живого существа (16) из полученных значений измерений;
- извлекающий блок (38) для извлечения по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен;
- оценочный блок (30) для получения предварительно определенной корректирующей информации (86, 88) в соответствии с по меньшей мере одной идентифицированной частью тела из набора данных предварительно определенной корректировочной информации, адаптированной и присвоенной для различных частей тела, и
- корректировочный блок (34) для корректировки по меньшей мере одного первого сигнала в соответствии с корректировочной информацией (86, 88) и для генерации по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа (16).
14. Способ обработки значений измерений, содержащих по меньшей мере компонент, представляющий физический феномен в живом существе (16), включающий стадии:
- получение показаний измерений от по меньшей мере одной части тела живого существа (16), полученных с расстояния и имеющих по меньшей мере компонент, представляющий физический феномен в живом существе (16);
- идентификация по меньшей мере одной части тела живого существа (16) из полученных значений измерений;
- извлечение по меньшей мере одного первого сигнала из показаний измерений, представляющих по меньшей мере один компонент, представляющий физический феномен;
- получение предварительно определенной корректирующей информации (86, 88) в соответствии с по меньшей мере одной идентифицированной частью тела из набора данных предварительно определенной корректировочной информации, адаптированной и присвоенной для различных частей тела;
- корректировка по меньшей мере одного первого сигнала в соответствии с корректирующей информацией (86, 88); и
- генерация по меньшей мере одного выходного сигнала, представляющего физический феномен живого существа (16).
15. Машиночитаемый носитель, хранящий компьютерную программу, которая содержит средства программного кода, чтобы управлять компьютером для того, чтобы осуществлять стадии способа по п. 14, когда указанную компьютерную программу исполняют на компьютере.
| WO 2011042858 A1, 14.04.2011 | |||
| US 2003176776 A1, 18.09.2003 | |||
| СПОСОБЫ ИЗМЕРЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ПУЛЬСОВОЙ ВОЛНЫ, АРТЕРИАЛЬНОГО ДАВЛЕНИЯ, ТЕМПЕРАТУРЫ ТЕЛА, СОДЕРЖАНИЯ ГЕМОГЛОБИНА В КРОВИ И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2118122C1 |
| WO 2007063516 A2, 07.06.2007 | |||
| Ультразвуковой измеритель толщины жировой прослойки | 1984 |
|
SU1297782A1 |

