Изобретение относится к области цифровой обработки сигнала в датчиках давления и может быть использовано для создания цифровых датчиков давления высокого класса точности, у которых показания соответствующего аналогового датчика зависят одновременно от двух факторов.
Например, некоторые аналоговые тензомостовые датчики давления, выполненные по технологии «кремний на сапфире», характеризуются нелинейностью от 0.1% до 2% и имеют зависимость коэффициента чувствительности порядка 0.1%/°С.
Заявленное техническое решение позволяет путем цифровой обработки сигнала добиться у устройств, снабженных аналоговыми тензомостовыми датчиками давления, нелинейности не более 0.05% против 0.1%-2% у исходных аналоговых датчиков и температурного ухода коэффициента чувствительности не более 0.001%/°С в температурном диапазоне от -40°С до +80°С против 0.1%/°С у исходных аналоговых датчиков.
Таким образом, заявленное техническое решение обеспечивает возможность повышения класса точности известных как таковых аналоговых тензомостовых датчиков давления от класса 0,1-2(0.1%-2%) до датчиков давления высокой точности класса не хуже 0.05 (нелинейность не более 0.05%). В целом заявленное техническое решение обеспечивает повышение точности измерения давления на два порядка, более точно на примере заявленного технического решения до 80 раз.
При этом следует отметить, что заявленный способ цифровой обработки сигнала(ов) может быть применен к датчикам различных физических величин, нелинейности которых находятся в произвольной зависимости от внешних параметров, как то для датчиков магнитного поля на основе эффекта Холла, датчиков ИК излучения, датчиков концентрации различных газов и т.д.
Из исследованного уровня техники заявителем выявлен ряд технических решений, приведенных далее:
1. В техническом решении [1] калибровка однопараметрического датчика с последующей цифровой обработкой сигнала с применением алгоритма одномерной обратной интерполяции.
Сущность известного решения заключается в том, что измеряемая величина вычисляется по записанным на этапе калибровки табличным значениям отклика датчика при известных калибровочных значениях давления. Промежуточные значения давления определяются с помощью обратной одномерной интерполяции.
Недостатком данного способа является невозможность компенсации температурных уходов показаний вследствие того, что алгоритм одномерной обратной интерполяции применим только к калибровке однопараметрических датчиков и не может помимо давления учитывать температуру.
2. В техническом решении [3] представлен способ коррекции растра сканирующего микроскопа, заключающийся в применении алгоритма обратной двумерной интерполяции. Сущность известного решения заключается в том, что изображение, получаемое на электронном сканирующем микроскопе, корректируется с использованием калибровочной таблицы. Калибровочная таблица содержит поправки к измеряемым координатам, которые, в свою очередь, зависят от двух координат отклонения луча. Поправки вычисляются по двумерной калибровочной таблице с помощью алгоритма обратной двумерной интерполяции, реализованного на персональном компьютере.
Недостатком данного способа является вычислительная сложность алгоритма, рассчитанного на реализацию на персональном компьютере, а не на встраиваемые применения. Кроме того, указанный способ не предназначен для непосредственного применения в цифровых датчиках физических величин.
3. Из зарубежных источников информации заявителем выявлено техническое решение [5] Thomas A., Besser S. Hall effect measurement instrument with temperature compensation // Patent US 20140132254 A2 - 2014. Сущность заключается в использовании установки измерения эффекта Холла, включающей в себя датчик Холла и температурный датчик в непосредственной близости друг к другу, консоль для отображения данных, узел сбора и обработки данных, получающий сигнал от датчика Холла и поставляющий некорректированный набор данных, модуль температурной коррекции, предназначенный для вычисления поправочных индексов для нескорректированных данных, и модуль коррекции данных, имеющий на выходе скорректированные по температуре результаты измерений. Техническое решение по совокупности признаков совпадает с российским патентом [2], приведенным далее в качестве прототипа, при этом принципиальное отличие заключается в том, что вместо датчика давления в указанном патенте [5] применен датчик Холла.
Недостатком указанного способа является применение простейшего способа компенсации температурных дрейфов, заключающегося в расчете поправочных коэффициентов, что не учитывает различный характер нелинейности(ей), вследствие чего не реализуются в полной мере возможности высокоточной калибровки цифровых датчиков.
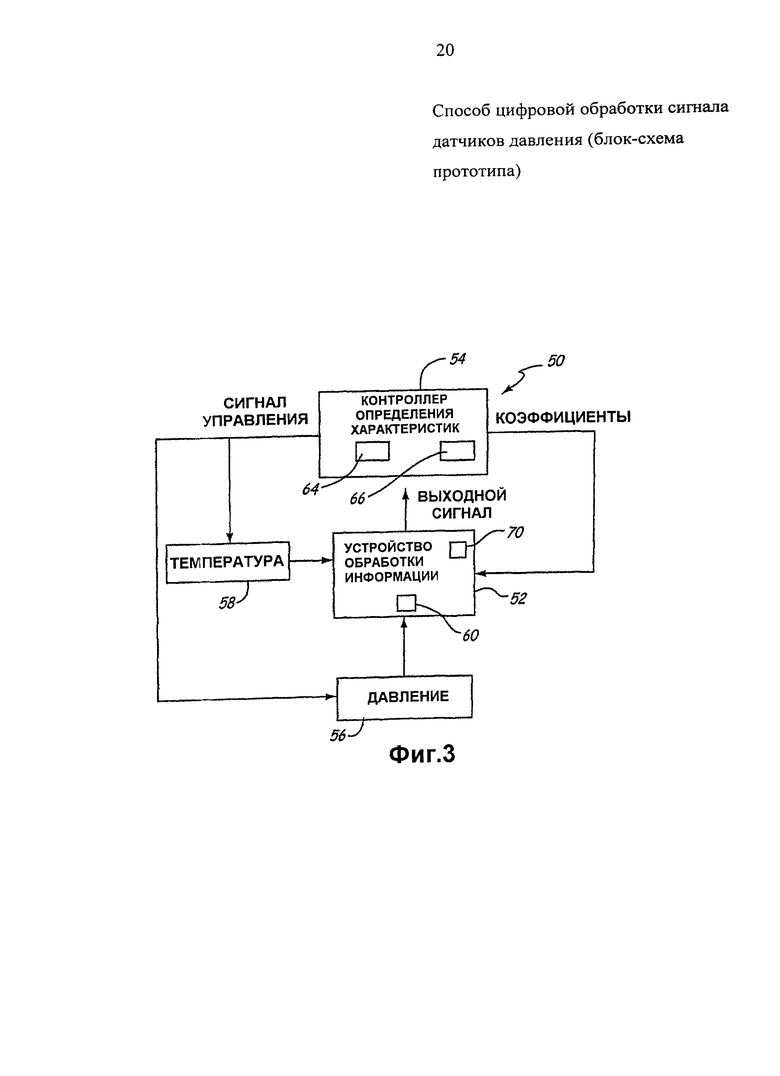
Наиболее близким аналогом, выбранным заявителем в качестве прототипа заявленного технического решения, по совокупности заявленных признаков и достигаемым техническим результатам является способ калибровки, осуществляемый в применении к датчикам давления [2].
В указанном выше техническом решении [2] датчик калибруется для различных значений температур. Сущность которого заключается в том, что способ определения характеристик датчика давления устройства обработки информации, содержащий следующие этапы:
- подают множество давлений на датчик давления устройства обработки информации в пределах диапазона давлений, используемого для определения характеристик;
- принимают от датчика давления выходные сигналы, соответствующие приложенному давлению; и
- определяют корректировочное соотношение на основе упомянутых выходных сигналов, поступивших от датчика давления, при этом упомянутое множество приложенных давлений неравномерно распределено в упомянутом диапазоне давлений, используемом для определения характеристик, и корректировочное соотношение является функцией от упомянутого множества приложенных давлений, неравномерно распределенных в пределах диапазона давлений, причем упомянутый этап приложения множества давлений содержит приложение давлений, которые в области более низких давлений расположены друг от друга с меньшим интервалом по сравнению с областью более высоких давлений, и упомянутый этап приложения множества давлений осуществляется при более чем одной температуре, причем этап приложения множества давлений содержит перемещение текучей среды через первичный преобразовательный элемент для создания перепада давления.
В целом сущность известного решения заключается в том, что калибровка датчика с последующим применением одномерной обратной интерполяции выполняется для различных температур, в результате чего получается усредненная по температуре передаточная характеристика датчика. После этого вводится поправочный множитель, зависящий от температуры, для которого также применяется одномерная обратная интерполяция. В результате калибровочная передаточная характеристика датчика представляет собой частный случай произведения усредненной передаточной характеристики и функции коррекции температурного ухода, т.е. эта характеристика оказывается искусственно факторизована.
Таким образом, основополагающим недостатком представленного выше способа является применение простейшего способа компенсации температурных дрейфов, заключающегося в расчете поправочных коэффициентов, вследствие чего не реализуются в полной мере возможности калибровки цифровых датчиков по следующим причинам:
- не удается достичь требуемого более высокого класса точности,
- требуется вводить большое число калибровочных точек.
Более детально, сущность известного способа заключается в том, что показания датчика фиксируются для нескольких приложенных калибровочных значений давления, причем интервалы между калибровочными значениями меньше в области низких давлений.
Неравномерным расположением калибровочных точек на калибровочной шкале достигается повышенная точность калибровки в начале измерительной шкалы датчика. Этап приложения серии калибровочных давлений повторяется для нескольких значений температур, после чего применяется линейная интерполяция для расчета измеряемого давления по показаниям датчика при промежуточных между калибровочными точками давлениях, а также линейная интерполяция для расчета угла наклона передаточной характеристики датчика при промежуточных температурах. В указанном способе калибровки датчиков, основанном на принципе, представленном в работе [2], есть несколько недостатков, раскрываемых детально далее:
1. Нацеленность работы [2] на расширение числа измерительных диапазонов датчиков, вследствие чего калибровочные значения давления имеют меньшие интервалы в начале измерительной шкалы. При этом интерполяция по калибровочным точкам в верхней части измерительной шкалы будет давать худшие результаты в верхней части шкалы по сравнению с равномерным распределением калибровочных точек.
2. Применение простейших алгоритмов интерполяции не реализует в полной мере возможности цифровой обработки сигнала, вследствие чего создание цифрового датчика высокого класса точности либо накладывает высокие требования на соответствующий аналоговый датчик, либо требует введения большого числа калибровочных точек давления.
3. Рассмотренный способ применяется только к компенсации температурных дрейфов датчиков давления и предполагает близкой к линейной зависимость чувствительности датчика от температуры.
Заявленное техническое решение поясняется Фиг. 1-3.
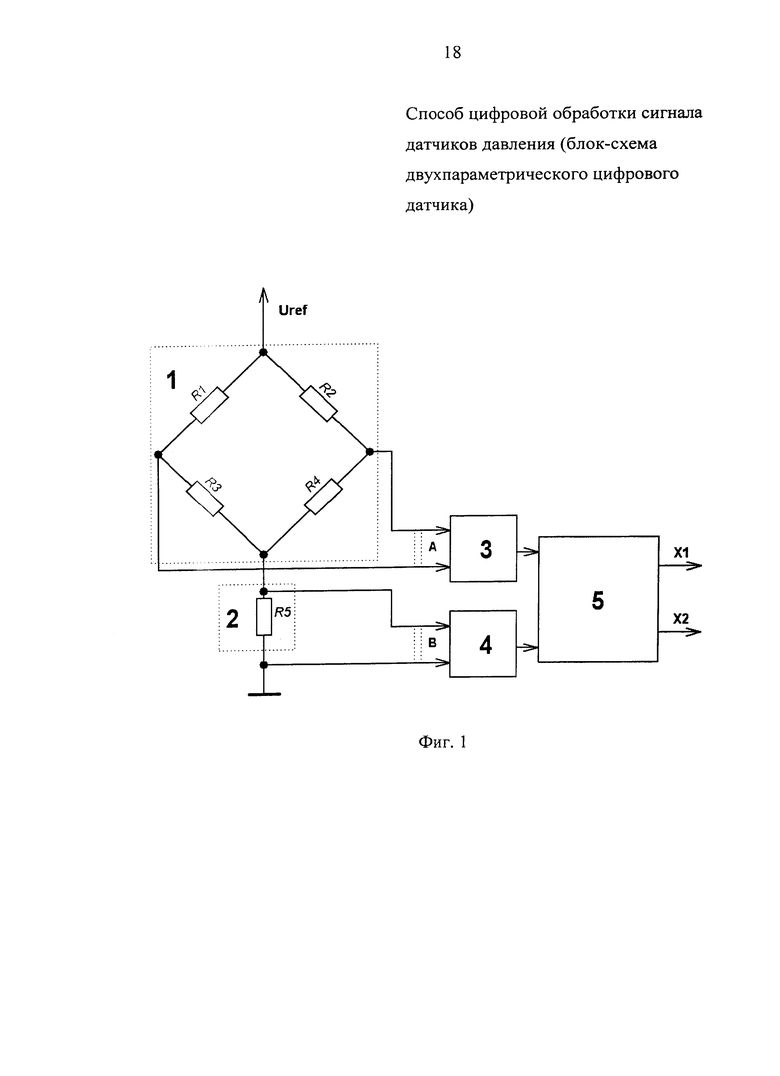
На Фиг. 1 представлен способ цифровой обработки сигнала датчиков давления (блок-схема заявленного двухпараметрического цифрового датчика).
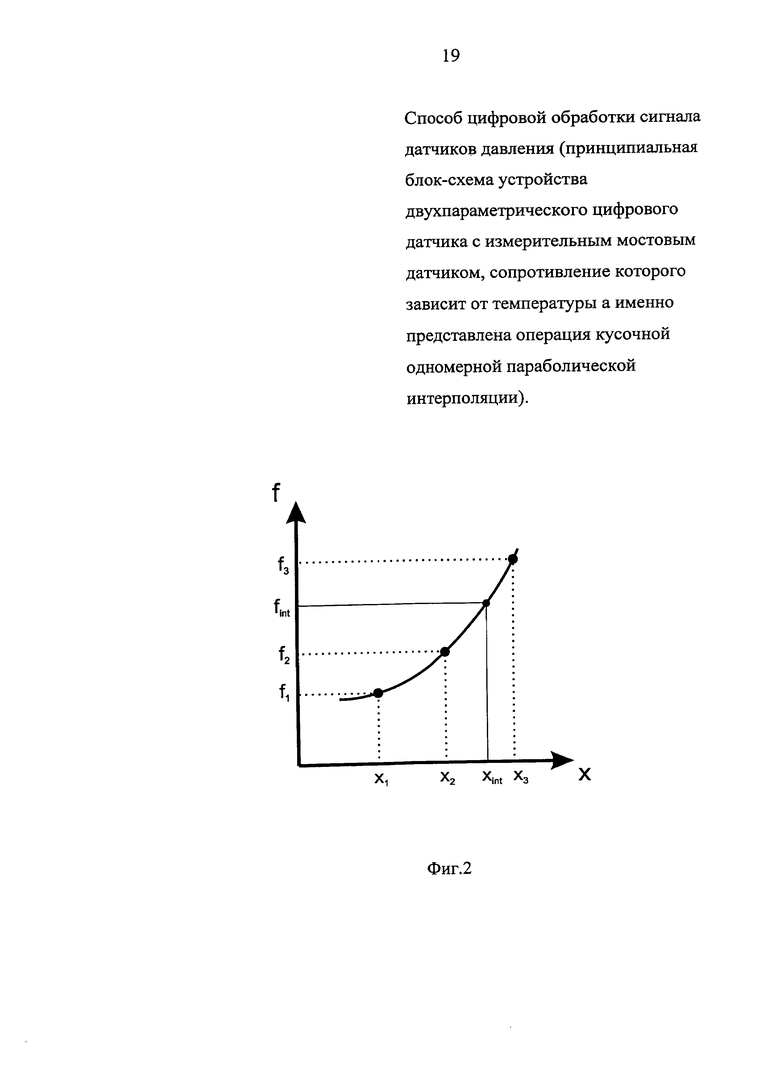
На Фиг. 2 представлена принципиальная блок-схема устройства двухпараметрического цифрового датчика с измерительным мостовым датчиком, сопротивление которого зависит от температуры, а именно представлена операция кусочной одномерной параболической интерполяции.
На Фиг. 3 представлена (блок-схема цифровой обработки сигнала датчиков давления - прототип).
Основной целью заявленного технического решения является устранение недостатков прототипа, а именно:
- достижение высокого класса точности,
- исключение необходимости большого числа калибровочных точек.
Кроме указанного реализация указанных целей приводит, как следствие:
- к устранению влияния различного характера нелинейностей при различных температурах работы на измерительные свойства датчика,
- расширению диапазона рабочих температур при прочих равных условиях,
- возможности применения имеющихся на рынке датчиков различной конструкции,
- возможности применения имеющихся на рынке датчиков различного принципа,
- предоставляется возможность применения указанного алгоритма в датчиках других физических величин.
В конечном счете указанные преимущества обеспечивают конкурентоспособность производимой продукции, импортозамещение, экономическую эффективность применения заявленного технического решения по назначению.
Сущность заявленного технического решения заключается в том, что в способе цифровой обработки сигнала датчиков давления, заключающемся в цифровой обработке сигналов, соответствующих одновременно двум физическим величинам давления и температуры, выраженных напряжениями А и В соответственно, выполняют калибровку показаний значения давления, согласно изобретению выполняют преобразование выходного напряжения А датчика в цифровой код Ad, выполняют преобразование падения напряжения В в цифровой код Bd, цифровой код Ad сравнивают с калибровочными значениями, хранящимися в энергонезависимой памяти узла обработки сигнала, посредством кусочной одномерной параболической интерполяции находят соответствующие всем калибровочным температурам эффективные интерполяционные значения величины давления X1, посредством кусочной одномерной параболической интерполяции для всех калибровочных значений температур получают набор эффективных величин кодов tint, соответствующих различным калибровочным температурам, затем получают физическую величину температуры fint=X2, затем получают физическую величину давления fint=X1, а полученные в виде цифрового кода величины давления X1 и температуры Х2 выводятся на дисплей или передаются по цифровому интерфейсу для дальнейшей обработки и использования.
При этом следует констатировать то, что техническая сущность заявленного технического решения в целом качественно схожа по совокупности некоторых совпадающих признаков и некоторым достигаемым техническим результатам, изложенным в работе [2], и заключается в реализации алгоритма обратной двумерной интерполяции, выполненного в виде последовательности действий кусочно-параболической интерполяции. При этом должно выполняться взаимно однозначное соответствие для сочетания двух измеряемых физических величин (например, температура и давление) и сочетание соответствующих им измеренных значений (например, коды на выходе аналогово-цифровых преобразователей с неидеального температурного датчика и неидеального датчика давления).
Реализация заявленного способа заключается в выполнении следующей последовательности действий:
1. Калибровка двухпараметрического датчика физической величины путем приложения к датчику эталонных значений. Калибровочные значения (отклик датчика) заносятся в калибровочную таблицу.
2. Применение алгоритма обратной двумерной интерполяции, на входе которого два параметра, являющихся откликом двухпараметрического датчика физической величины, на выходе - числовые значения физической величины.
Таким образом, основываясь на изложенном выше, заявленный способ, по сравнению с наиболее близкими аналогами, выбранными в качестве прототипа [2], позволяет реализовать следующие технические преимущества:
1. Повышение класса точности цифрового датчика давления по сравнению с его аналоговой основой характеризуется коэффициентом не хуже 80 раз, при числе равномерно распределенных на интервале измерений калибровочных точек, равном десяти. То есть, например, если исходный датчик давления обладал нелинейностью передаточной характеристики 2%, заявленный способ обеспечит восстановление измеренных значений давления по калибровочной таблице из 10 точек с точностью не хуже 0.05%.
2. В случае применения способа к компенсации температурных дрейфов датчиков компенсация температурного дрейфа нуля шкалы и угла наклона передаточной характеристики характеризуется коэффициентом не хуже 100 при числе температур калибровки, равном трем. То есть, например, если исходный аналоговый датчик имел температурный коэффициент чувствительности 0.1%/°С, заявленный способ обеспечит восстановление измеренных значений с эквивалентным температурным дрейфом цифрового датчика не хуже 0.001%/°С в температурном интервале шириной 120°С.
3. Снижается минимальное необходимое число калибровочных точек, требуемых для калибровки цифрового датчика давления заданного класса точности, при прочих равных условиях.
Характерной особенностью заявленного технического решения является возможность создания цифровых датчиков физических величин высокого класса точности при минимальных вычислительных нагрузках на узел цифровой обработки сигнала датчика и при минимальном числе калибровочных точек.
Получение данных результатов обеспечивается за счет характерной особенности заявленного технического решения, заключающегося в применении оригинального алгоритма обратной двумерной интерполяции к восстановлению промежуточных между калибровочными точками значений физических величин.
Заявленное техническое решение иллюстрируется Фиг. 1, на которой приведена блок-схема двухпараметрического цифрового датчика, и Фиг. 2, на которой приведена операция кусочной одномерной параболической интерполяции, и формула его расчета

а в качестве примера приведена принципиальная блок-схема устройства с измерительным мостовым датчиком, сопротивление которого зависит от температуры.
Заявленный способ реализации калибровки двухпараметрического датчика осуществляется посредством следующих элементов: 1 - мостовой датчик давления, имеющий зависимость сопротивления от температуры, 2 - измерительный токовый шунт-датчик температуры, 3 и 4 - аналогово-цифровые преобразователи (АЦП), 5 - микропроцессорный узел цифровой обработки сигнала.
Заявленное техническое решение осуществляется посредством реализации следующей последовательности операций:
1. Подготовительная операция. Двухпараметрический цифровой датчик давления калибруется путем приложения к датчику эталонных значений с помощью задатчика давления. Значения АЦП 3 и 4 заносятся в энергонезависимую память узла 5. Калибровка датчика выполняется для различных эталонных значений температур и значений давления, минимальное число каждых из них равно трем. В роли температуры может выступать другой параметр. Для простоты изложения, в дальнейшем рассматривается давление в качестве первого параметра А и температура в качестве второго параметра В.
2. Выполняется преобразование выходного напряжения А мостового датчика R1-R4 в цифровой код. Выходное напряжение датчика зависит как от измеряемой физической величины, так и, в меньшей степени, от температуры.
3. Выполняется преобразование падения напряжения В на токовом шунте R5 в цифровой код. Падение напряжения на шунте R5 зависит как от температуры, так и, в меньшей степени, от измеряемой физической величины.
4. Цифровой код Ad сравнивается с калибровочными значениями, хранящимися в энергонезависимой памяти микропроцессорного цифрового узла обработки сигнала. С помощью кусочной одномерной параболической интерполяции, схематично показанной на Фиг.2, находятся соответствующие всем калибровочным температурам эффективные интерполяционные значения физической величины X1. В роли x1, x2, x3 на Фиг.2 выступают калибровочные значения кода АЦП Ad для фиксированной калибровочной температуры, в роли xint - код АЦП Ad для текущего измерения, в роли f1, f2, f3 - калибровочные значения давления для фиксированной температуры, в роли fint - эффективное давление при данной калибровочной температуре. Результатом этой операции будет набор эффективных величин давления tint, соответствующих различным калибровочным температурам.
5. Операция кусочной одномерной параболической интерполяции повторяется для всех калибровочных температур следующим образом. В роли х1 х2, х3 выступают калибровочные значения давления для фиксированной калибровочной температуры, в роли xint - эффективное значение давления для данной калибровочной температуры, полученное на предыдущем этапе, в роли f1, f2, f3 - калибровочные значения кода АЦП Bd, в роли fint - эффективный код АЦП Bd. Результатом этой операции будет набор эффективных величин кодов АЦП 4 fint, соответствующих различным калибровочным температурам.
6. Операция кусочной одномерной параболической интерполяции повторяется следующим образом. В роли x1, x2, x3 выступают эффективные значения кода АЦП 4, полученные на предыдущем шаге, в роли xint - текущий код АЦП Bd, в роли f1, f2, f3 - калибровочные значения температуры, в роли fint - текущее значение температуры. Результатом этой операции будет физическая величина температуры fint=X2.
7. Операция кусочной одномерной параболической интерполяции повторяется следующим образом. В роли x1, х2, х3 выступают эффективные значения кода АЦП 4, полученные в операции 5, в роли xint - текущий код АЦП Bd, в роли f1, f2, f3 - калибровочные значения давления, в роли fint - текущее значение давления. Результатом этой операции будет физическая величина давления fint=X1.
8. Полученные в виде цифрового кода величины X1 и X2 выводятся на дисплей или передаются по цифровому интерфейсу для дальнейшей обработки и использования.
Отличие заявленного технического решения известных в мире аналогов [1-5] заключается в следующем. Для восстановления измеренной физической величины давления с учетом зависимости показания аналогового датчика от другого паразитного внешнего фактора, например, температуры, используется оригинальный алгоритм обратной двумерной интерполяции, реализованный путем последовательного применения прямой кусочно-параболической интерполяции. В отличие от простых интерполяционных алгоритмов заявленное техническое решение обеспечивает более высокий класс точности датчика при прочих равных условиях. В отличие от метода введения поправочных коэффициентов для различных температур в работе [2], заявленный способ оказывается нечувствительным к изменению вида передаточной характеристики при различных температурах, что важно, если датчик имеет несколько зависящих от температуры вкладов в нелинейность. Так, в тензометрических датчиках давления кроме нелинейности тензоэлемента имеется дополнительный вклад в нелинейность от механического мембранного преобразователя давление-смещение. При этом суммарная нелинейность может иметь как положительную, так и отрицательную вторую производную от передаточной характеристики.
Важные для практического применения отличия приведены в Таблице 1.
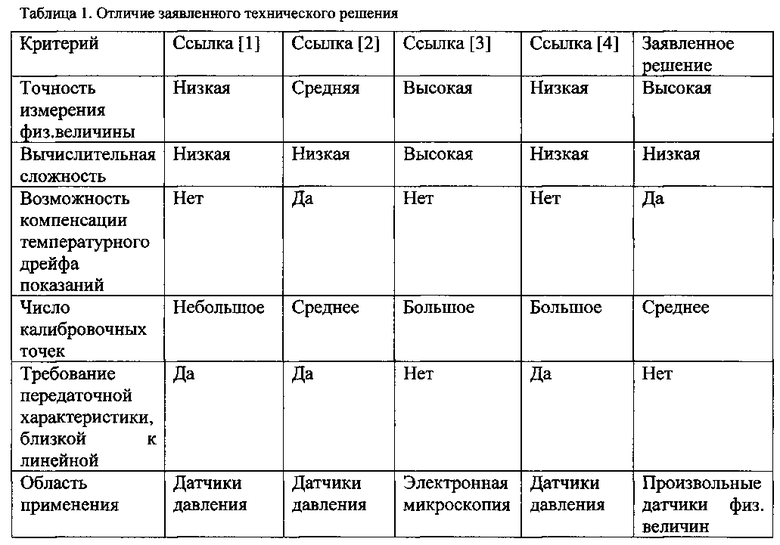
Описанный способ может быть применен к датчикам давления различного типа, как использующим тензопреобразователь, в которых в роли второго параметра, используемого в способе, выступает ток через измерительный мост, так и к однопараметрическим емкостным, при этом предполагается использование еще одного датчика фактора, вызывающего дрейф показаний основного параметра, например, температуры.
Данные результаты получены вследствие того, что в заявленном изобретении применены (использованы известные в принципе как таковые в науке) по отдельности принципы, элементы способов, однако они не известны в заявленном сочетании признаков способа (применяемой технологии), вследствие вышеизложенного заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям и критерию «изобретательский уровень», т.к. не является очевидным для специалистов в данной области.
Список литературы
[1] Min Wu, Shen-Chi Lin Calibration method for digital air pressure gauge // US Patent US 7,086,272 B2 - 2006.
[2] Броден Д.Э., Фогэрти Т.П., Уиклунд Д.Ю., Бичи Т.К., Шумахер М.С. Калибровка датчика давления при выполнении технологического процесса // Патент РФ №2358250 С2 - 2009.
[3] Chernov et al. High precision calibration and feature measurement system for a scanning probe microscope // US Patent US 5644512 - 1997.
[4] Зубов Е.Г., Шевчук B.B. Способ измерения физической величины // Патент РФ №2422784 С1 - 2011.
[5] Thomas A., Besser S. Hall effect measurement instrument with temperature compensation // Patent US 20140132254 A2 - 2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКТИРОВКИ ПЕРЕДАТОЧНОЙ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2023 |
|
RU2837730C2 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКТИРОВКИ ПЕРЕДАЮЩЕЙ ФУНКЦИИ ДАТЧИКА ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2003 |
|
RU2247325C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И КАЛИБРОВКИ НА ОСНОВЕ ТЕНЗОМОСТОВОГО ИНТЕГРАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ДАВЛЕНИЯ | 2015 |
|
RU2585486C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ, КАЛИБРОВКИ И ДАТЧИК ДАВЛЕНИЯ НА ОСНОВЕ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2012 |
|
RU2498250C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОТОКА МНОГОФАЗНОЙ СМЕСИ ЖИДКОСТИ И ГАЗА | 2007 |
|
RU2386930C2 |
| СПОСОБ РЕГИСТРАЦИИ ВСПЫШЕК НА СОЛНЦЕ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2715837C1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |
| ТЕРМОМЕТРИЧЕСКАЯ КОСА И СПОСОБ ЕЕ КАЛИБРОВКИ | 2008 |
|
RU2389984C2 |
| ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ И СПОСОБ ЕЕ ИЗМЕРЕНИЯ | 2017 |
|
RU2677786C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ИНТЕЛЛЕКТУАЛЬНЫЙ ДАТЧИК ДАВЛЕНИЯ НА ЕГО ОСНОВЕ | 2012 |
|
RU2515079C2 |
Изобретение относится к области цифровой обработки сигнала в датчиках давления и может быть использовано для создания цифровых датчиков давления высокого класса точности. Техническим результатом изобретения является повышение точности цифровой обработки сигнала в датчиках давления. Способ цифровой обработки сигнала датчиков давления заключается в цифровой обработке сигналов, соответствующих одновременно двум физическим величинам давления и температуры. При этом выполняют преобразование выходного напряжения А датчика в цифровой код Ad. Выполняют преобразование падения напряжения В в цифровой код Bd. Цифровой код Ad сравнивают с калибровочными значениями. Посредством кусочной одномерной параболической интерполяции находят соответствующие всем калибровочным температурам эффективные интерполяционные значения величины давления X1. Посредством кусочной одномерной параболической интерполяции для всех калибровочных значений температур получают набор эффективных величин кодов fint. Затем получают физическую величину температуры fint=X2. Затем получают физическую величину давления fint=X1. Полученные в виде цифрового кода величины давления X1 и температуры Х2 выводятся на дисплей или передаются по цифровому интерфейсу для дальнейшей обработки и использования. 3 ил., 1 табл.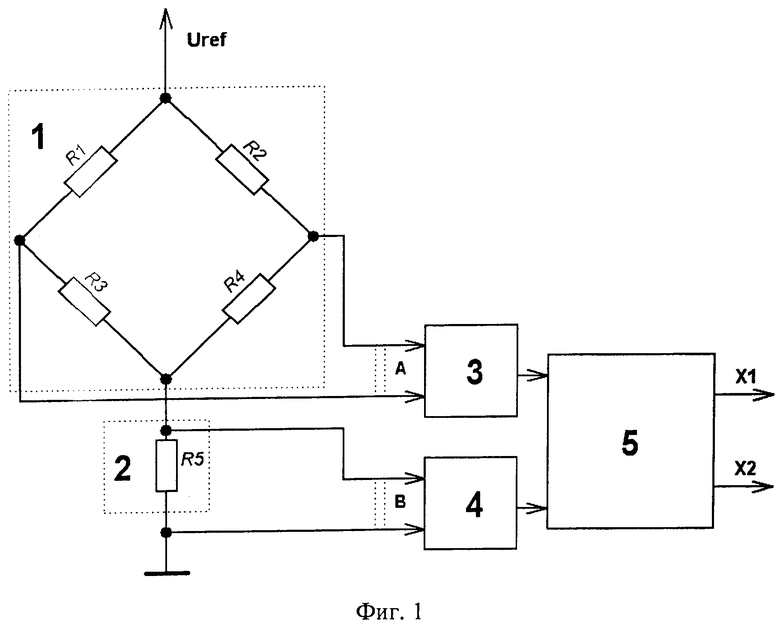
Способ цифровой обработки сигнала датчиков давления, заключающийся в цифровой обработке сигналов, соответствующих одновременно двум физическим величинам давления и температуры, выраженных напряжениями А и В соответственно, выполняют калибровку показаний значения давления, отличающийся тем, что выполняют преобразование выходного напряжения А датчика в цифровой код Ad, выполняют преобразование падения напряжения В в цифровой код Bd, цифровой код Ad сравнивают с калибровочными значениями, хранящимися в энергонезависимой памяти узла обработки сигнала, посредством кусочной одномерной параболической интерполяции находят соответствующие всем калибровочным температурам эффективные интерполяционные значения величины давления X1, посредством кусочной одномерной параболической интерполяции для всех калибровочных значений температур получают набор эффективных величин кодов fint, соответствующих различным калибровочным температурам, затем получают физическую величину температуры fint=X2, затем получают физическую величину давления fint=Xl, а полученные в виде цифрового кода величины давления X1 и температуры Х2 выводятся на дисплей или передаются по цифровому интерфейсу для дальнейшей обработки и использования.
| КАЛИБРОВКА ДАТЧИКА ДАВЛЕНИЯ ПРИ ВЫПОЛНЕНИИ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА | 2004 |
|
RU2358250C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2009 |
|
RU2422784C1 |
| РУЧНОЙ ПРЕСС ДЛЯ ФОРМОВАНИЯ КИРПИЧЕЙ, МОСТОВЫХ КАМНЕЙ И Т. П. С ПОВОРОТНЫМ СТОЛОМ | 1927 |
|
SU8120A1 |
| US 20110153253 А1, 23.06.2011. | |||

