Область техники, к которой относится изобретение
Настоящее изобретение относится к области носимых устройств и, в частности, к способу обработки данных движения пользователя и системе контроля движения пользователя.
Уровень техники
В связи с растущим вниманием к вопросам научного движения и физического здоровья большое развитие получили устройства для контроля движения. Сегодня устройства для контроля движения главным образом осуществляют контроль информации о физиологических параметрах (например, сигнал электромиографии (electromyography (EMG)), когда пользователь движется, представляют физиологические данные пользователю и представляет предложения на основе этих физиологических данных. Для того чтобы помочь пользователю заниматься физическими упражнениями на более прочной научной основе и более эффективно, устройству для контроля движения необходимо иметь функцию представления пользователю на дисплее силы каждого мускула (иными словами, амплитуды EMG-сигнала) в реальном времени. Для обеспечения лучшего восприятия пользователем устройству для контроля движения необходимо сглаживать EMG-сигнал для получения сглаженной энергетической карты EMG. Известные устройства для контроля движения не могут идентифицировать аномальные сигналы при обработке EMG-сигнала, такие как аномальный EMG-сигнал, вызванный неподходящей одеждой, натягиванием, артефактами движения и т.п., так что энергетическая карта EMG является нестабильной и восприятие пользователем является плохим.
Поэтому желательно разработать способ обработки данных движения и систему контроля движения для идентификации и коррекции аномального сигнала в реальном времени.
Раскрытие сущности изобретения
Настоящее изобретение может предложить способ обработки данных движения и систему контроля движения для идентификации и коррекции аномального сигнала в реальном времени.
Согласно первому аспекту настоящего изобретения может быть предложен способ обработки данных движения. Способ обработки данных движения может содержать этапы, на которых: получают, в реальном времени, электромиографический (EMG) сигнал, соответствующего позиции проведения измерений в процессе движения пользователя; определяют, на основе EMG-сигнала, аномальный сигнал в составе EMG-сигнала; и корректируют аномальный сигнал.
В некоторых вариантах осуществления на этапе определения, на основе EMG-сигнала, аномального сигнала в составе EMG-сигнал: обрабатывают EMG-сигнал во временной области для определения аномального сигнала; или обрабатывают EMG-сигнал в частотной области для определения аномального сигнала.
В некоторых вариантах осуществления на этапе обработки EMG-сигнала во временной области для определения аномального сигнала выбирают, на основе окна во временной области в EMG-сигнале, по меньшей мере одно временное окно из указанного окна во временной области в EMG-сигнале, причем каждое из указанного по меньшей мере из одного временного окна занимает свой временной интервал; и определяют, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномальный сигнал.
В некоторых вариантах осуществления информация о характеристиках может содержать по меньшей мере одно из информации об амплитуде или статистическую информацию относительно информации об амплитуде. Статистическая информация относительно информации об амплитуде может содержать по меньшей мере одно из энтропии, дисперсии, среднеквадратичного отклонения, стандартного отклонения среднеквадратичного отклонения или частоты переходов через нуль информации об амплитуде.
В некоторых вариантах осуществления аномальный сигнал может представлять собой скачкообразный сигнал. Указанное по меньшей одно временное окно содержит множество временных окон, при этом на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей одном временном окне, аномального сигнала: определяют информацию о характеристиках, соответствующую EMG-сигналу, во указанном множестве временных окон; и определяют, что отношение информации о характеристиках, соответствующей временному окну, следующему за временным интервалом, к информации о характеристиках, соответствующей временному окну, предшествующему временному интервалу, превосходит заданное первое пороговое значение, и считают EMG-сигнал во временном окне, следующем за указанным временным интервалом, скачкообразным сигналом.
В некоторых вариантах осуществления аномальный сигнал может представлять собой пропуск сигнала, при этом на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномального сигнала: определяют по меньшей мере один сегмент информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне; и считают EMG-сигнал во временном окне, соответствующем информации о характеристиках, которая находится в указанном по меньшей мере одном сегменте информации о характеристиках и которая ниже заранее сохраненного второго порогового значения информации о характеристиках, пропущенным сигнала.
В некоторых вариантах осуществления аномальный сигнал может представлять собой сигнал насыщения, при этом на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномального сигнала: определяют по меньшей мере один сегмент информации о характеристиках, соответствующего EMG-сигналу в указанном по меньшей мере одном временном окне; и считают EMG-сигнал во временном окне, соответствующем информации о характеристиках, которая находится в указанном по меньшей мере одном сегменте информации о характеристиках и превосходит предварительно сохраненную информацию о характеристиках насыщения, сигналом насыщения.
В некоторых вариантах осуществления EMG-сигнал может представлять собой сигнал, полученный на основе алгоритма удаления постоянной составляющей (direct current (DC)). Алгоритм удаления DC может представлять собой по меньшей мере один из алгоритма устранения усреднения или алгоритма фильтрации верхних частот.
В некоторых вариантах осуществления аномальный сигнал может представлять собой колебательный сигнал, полученный с использованием алгоритма фильтрации верхних частот. На этапе обработки EMG-сигнала во временной области для определения аномального сигнала: определяют референсную амплитуду колебаний и референсную длительность колебательного сигнала на основе параметра фильтра, используемого алгоритмом фильтрации верхних частот; и сопоставляют EMG-сигнал с референсной амплитудой колебаний и референсной длительностью в реальном времени; и считают EMG-сигнал, соответствующий интервалу сигнала, в котором EMG-сигнал соответствует референсной амплитуде колебаний и референсной продолжительности, колебательным сигналом.
В некоторых вариантах осуществления на этапе обработки EMG-сигнала в частотной области для определения аномального сигнала: получают, на основе алгоритма преобразования в частотную область, EMG-сигнал в частотной области в реальном времени; определяют спектральную характеристику сигнала частотной области в реальном времени; и определяют EMG-сигнала, соответствующий сигналу частотной области, спектральная характеристика которого не удовлетворяет заданному условию, в качестве аномального сигнала.
В некоторых вариантах осуществления спектральная характеристика может представлять собой по меньшей мере одно из формы спектра, спектральной плотности мощности, частоты средней мощности, медианной частоты или масштаба вейвлетов.
В некоторых вариантах осуществления на этапе коррекции аномального сигнала в реальном времени: выполняют в реальном времени операции выборки данных из EMG-сигнала до аномального сигнала для получения выборочных данных; определяют, на основе выборочных данных, соответствующих окну временной области EMG-сигнала, прогнозируемых данных, соответствующих моменту времени появления аномального сигнала; определяют, на основе прогнозируемых данных, корректировочные данные, соответствующие моменту времени появления аномального сигнала; и корректируют аномальный сигнал с использованием корректировочных данных.
В некоторых вариантах осуществления на этапе определения, на основе выборочных данных, соответствующих окну временной области EMG-сигнала, прогнозируемых данных, соответствующих моменту времени появления аномального сигнала выполняют по меньшей мере одно из: определения, на основе выборочных данных, соответствующих указанному окну временной области, аппроксимирующей функции; определения, на основе аппроксимирующей функции, прогнозируемых данных, соответствующих моменту времени появления аномального сигнала; или определения, на основе выборочных данных, соответствующих указанному окну временной области, и настраиваемой сети долго-кратковременной памяти (long-short term memory (LSTM)), прогнозируемые данные, соответствующие моменту времени появления аномального сигнала.
В некоторых вариантах осуществления на этапе определения, на основе прогнозируемых данных, корректировочных данных, соответствующих моменту времени появления аномального сигнала: в ответ на определение, что прогнозируемые данные находятся в пределах заданного диапазона, считают прогнозируемые данные корректировочными данными, причем заданный диапазон представляет собой диапазон данных, образованный максимальным значением и минимальным значением EMG-сигнала в окне временной области; или в ответ на определение, что прогнозируемые данные находятся вне заданного диапазона, считают выборочные данные, соответствующие EMG-сигналу, соседствующему с аномальным сигналом в пределах по меньшей мере одного кадра, корректировочными данными.
Согласно второму аспекту настоящего изобретения может быть предложена система контроля движения. Система контроля движения может содержать по меньшей мере один носитель для хранения информации и по меньшей мере один процессор. Указанный по меньшей мере один носитель для хранения информации может хранить по меньшей мере один набор команд для обработки данных движения. Указанный по меньшей мере один процессор может осуществлять связь с указанным по меньшей мере одним носителем для хранения информации. При работе системы контроля движения указанный по меньшей мере один процессор считывает указанный по меньшей мере один набор команд и выполняет способ обработки данных движения согласно первому аспекту настоящего изобретения.
Из приведенной выше технической схемы можно видеть, что способ обработки данных движения и система контроля движения, предлагаемые в настоящем изобретении, могут обрабатывать EMG-сигнал из частотной области или временной области для идентификации в EMG-сигнале аномального сигнала, такого как скачкообразный сигнал, пропущенный сигнал, сигнал насыщения и колебательный сигнал, полученный в результате действия алгоритма фильтрации верхних частот, и т.п. Эти способ обработки данных движения и система контроля движения могут далее выполнять операцию выборки данных применительно к EMG-сигналу посредством алгоритма выборки данных, прогнозировать данные, соответствующие моменту времени появления аномального сигнала, на основе выборочных данных для получения прогнозируемых данных, и заменять аномальный сигнал с использованием прогнозируемых данных для коррекции аномального сигнала. Предлагаемые способ обработки данных движения и система контроля движения могут не только точно идентифицировать аномальный сигнал, но также корректировать аномальный сигнал, так что скорректированные данные могут лучше соответствовать фактическому движению пользователя, тем самым улучшая взаимодействие с пользователем. Эти способ обработки данных движения и система контроля движения могут далее напоминать пользователю, что он носит устройство неправильно, когда будет идентифицирован аномальный сигнал, тем самым делая сбор данных более точным.
Краткое описание чертежей
Настоящее изобретение далее иллюстрировано примерными вариантами осуществления. Эти примерные варианты осуществления описаны подробно со ссылкой на прилагаемые чертежи. Эти варианты осуществления являются неисчерпывающими примерами, в которых подобные цифровые позиционные обозначения представляют подобные структуры на нескольких видах чертежей, при этом:
Фиг. 1 представляет упрощенную схему, иллюстрирующую пример сценария применения системы контроля движения согласно некоторым вариантам настоящего изобретения;
Фиг. 2 представляет упрощенную схему, иллюстрирующую пример компонентов аппаратуры и/или программного обеспечения примера носимого устройства согласно некоторым вариантам настоящего изобретения;
Фиг. 3 представляет упрощенную схему, иллюстрирующую пример компонентов аппаратуры и/или программного обеспечения примера компьютерного устройства согласно некоторым вариантам настоящего изобретения;
Фиг. 4 представляет структурную схему, иллюстрирующую пример носимого устройства согласно некоторым вариантам настоящего изобретения;
Фиг. 5 представляет логическую схему, иллюстрирующую пример процедуры контроля движения согласно некоторым вариантам настоящего изобретения;
Фиг. 6 представляет логическую схему, иллюстрирующую пример процедуры обработки данных движения согласно некоторым вариантам настоящего изобретения;
Фиг. 7 представляет логическую схему, иллюстрирующую пример процедуры обработки сигнала электромиографии (EMG) во временной области согласно некоторым вариантам настоящего изобретения;
Фиг. 8 представляет упрощенную диаграмму, иллюстрирующую пример скачкообразного сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 9 представляет логическую схему, иллюстрирующую пример процедуры идентификации скачкообразного сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 10 представляет упрощенную диаграмму, иллюстрирующую пример пропуска сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 11 представляет логическую схему, иллюстрирующую пример процедуры идентификации пропуска сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 12 представляет упрощенную диаграмму, иллюстрирующую пример сигнал насыщения согласно некоторым вариантам настоящего изобретения;
Фиг. 13 представляет логическую схему, иллюстрирующую пример процедуры идентификации сигнала насыщения согласно некоторым вариантам настоящего изобретения;
Фиг. 14 представляет упрощенную диаграмму, иллюстрирующую пример колебательного сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 15 представляет логическую схему, иллюстрирующую пример процедуры для идентификации колебательного сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 16 представляет логическую схему, иллюстрирующую пример процедуры обработки EMG-сигнал в частотной области согласно некоторым вариантам настоящего изобретения;
Фиг. 17 представляет логическую схему, иллюстрирующую пример процедуры коррекции аномального сигнала согласно некоторым вариантам настоящего изобретения;
Фиг. 18 представляет упрощенную диаграмму, иллюстрирующую пример EMG-сигнала и скорректированной сглаженной кривой согласно некоторым вариантам настоящего изобретения.
Осуществление изобретения
Для более четкой иллюстрации технических решений, относящихся к вариантам настоящего изобретения, ниже приведено краткое введение к чертежам, относящимся к описанию вариантов. Очевидно, что описываемые ниже чертежи представляют собой только некоторые примеры или варианты настоящего изобретения. Даже рядовые специалисты в рассматриваемой области смогут, без особых творческих усилий, применять настоящее изобретение к другим аналогичным сценариям согласно этим чертежам. Если только другое не следует с очевидностью из контекста или если контекст не иллюстрирует иное, одинаковые цифровые позиционные обозначения на чертежах присвоены одинаковым структурам или операциям.
Следует понимать, что термины «система», «устройство», «блок» и/или «модуль», используемые здесь, составляют один из способов различения разных компонентов, элементов, частей, секций или узлов разных уровней. Однако если той же цели можно добиться с использованием других слов, такие слова могут быть заменены другими выражениями.
Как используется в настоящем описании и прилагаемой Формуле изобретения, формы единственного числа «некоторый» (“a”, “an”) и «этот» (“the”) охватывают также формы множественного числа, если только контекст четко не диктует иное. В общем случае, термины «содержать», «содержит» и/или «содержащий», «включать (в себя)», «включает» и/или «включающий», просто предлагают включать этапы и элементы, которые были четко идентифицированы, причем эти этапы и элементы не составляют исчерпывающего списка. Эти способы или устройства могут также содержать другие этапы или элементы.
Логические схемы, используемые в настоящем изобретении, иллюстрируют операции, реализуемые системами согласно вариантам настоящего изобретения. Следует понимать, что приведенные раньше или позже операции не обязательно выполнять точно в порядке описания. Вместо этого, такие операции можно выполнять в обратном порядке или одновременно. Кроме того, в эти процедуры могут быть добавлены одна или несколько других операций, либо одна или несколько операций могут быть исключены из этих процедур.
В настоящем изобретении может быть предложена система контроля движения. Эта система контроля движения может получать сигнал действия во время движения пользователя. Этот сигнал действия может представлять собой сигнал электромиографии (EMG), сигнал положения, сигнал электрокардиограммы (ЭКГ (electrocardiogram (ECG))), сигнал частоты дыхания или другой подобный сигнал, либо какую-то комбинацию таких сигналов. Система контроля движения может осуществлять контроль действия движения пользователя по меньшей мере на основе информации о характеристиках, соответствующей EMG-сигналу, или информации о характеристиках, соответствующей сигналу положения. Тип действия, число действий, качество действия, время действия или информация о физиологических параметрах, когда пользователь осуществляет действие, могут быть определены посредством частотной информации, амплитудной информации и т.п., соответствующей EMG-сигналу, угловой скорости, направления угловой скорости, значения этой угловой скорости, угла, информации о смещении, информации о напряжениях, и т.п., соответствующей сигналу положения. В некоторых вариантах, система контроля движения может также генерировать обратную связь о действиях пользователя в процессе занятий фитнесом на основе результатов анализа этих действий в процессе занятий фитнесом для управления занятиями пользователя фитнесом. Например, когда действие пользователя в процессе занятий фитнесом является нестандартным, система контроля движения может передать информацию подсказки (например, голосовую подсказку, вибрационную подсказку, стимуляцию электрическим током и т.п.) пользователю. Система контроля движения может быть применена к носимому устройству (например, одежде, браслету, шлему) медицинскому контрольному устройству (например, EMG-тестеру), устройству для занятий фитнесом и т.п. Система контроля движения может точно осуществлять контроль и передавать обратную связь в отношении действий пользователя посредством получения сигнала действия во время движения пользователя, без участия профессионалов, что может повысить эффективность занятий пользователя фитнесом и снизить затраты пользователя на занятия фитнесом.
Фиг. 1 представляет упрощенную схему, иллюстрирующую пример сценария применения системы контроля движения согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 1, система 100 контроля движения может содержать устройство 110 обработки, сеть 120 связи, носимое устройство 130 и устройство 140 мобильного терминала. Система 100 контроля движения может получить сигнал действия (например, сигнал электромиографии (EMG), сигнал положения, сигнал электрокардиограммы (ECG), сигнал частоты дыхания и т.п.), представляющий действие при движении пользователя. Эта система 100 контроля движения может осуществлять контроль и передавать обратную связь относительно действия в процессе движения пользователя на основе сигнала действия.
Например, система 100 контроля движения может осуществлять контроль и передавать обратную связь относительно действия пользователя в процессе занятий фитнесом. Когда пользователь носит на себе носимое устройство 130 для фитнеса, это носимое устройство 130 может получать сигнал действия пользователя. Устройство 110 обработки или устройство 140 мобильного терминала может принимать и анализировать сигнал действия пользователя для определения, является ли действие пользователя в процессе занятия фитнесом стандартизованным, чтобы осуществлять контроль действия пользователя. В частности, процедура контроля действий пользователя может содержать контроль типа действия, числа действий, качества действия, времени действия или информации о физиологических параметрах, когда пользователь осуществляет действие. Более того, система 100 контроля движения может генерировать обратную связь относительно действия пользователя в процессе занятия фитнесом на основе результата анализе этого действия в процессе занятия фитнесом для управления занятием пользователя фитнесом.
В качестве другого примера, система 100 контроля движения в процессе работы может осуществлять контроль и передавать сигнал обратной связи относительно действия пользователя. Например, когда пользователь носит на себе носимое устройство 130 для бега, система 100 контроля движения может осуществлять контроль, является ли действие бега пользователя стандартизированным, удовлетворяет ли время бега стандарту здоровья, или других подобных факторов. Когда время бега пользователя является слишком большим или действие бега пользователя является неправильным, устройство для фитнеса может передавать обратную связь относительно состояния движения пользователя, чтобы подсказать пользователю, что действие бега или время бега необходимо корректировать.
В некоторых вариантах, устройство 110 обработки может быть конфигурировано для обработки информации и/или данных относительно движения пользователя. Например, устройство 110 обработки может принять сигнал действия пользователя (например, EMG-сигнал, сигнал положения, сигнал ЭКГ (ECG), сигнал частоты дыхания, и т.п.), и далее может быть извлечена информация о характеристиках, соответствующих сигналу действия (например, информация о характеристиках, соответствующая EMG-сигналу, и информация о характеристиках, соответствующая сигналу положения, входящему в сигнал действия). В некоторых вариантах, устройство 110 обработки может осуществлять специальную обработку сигнала, такую как сегментация сигнала, предварительная обработка сигнала (например, корректирующая обработка сигнала, фильтрационная обработка и т.п.) применительно к EMG-сигналу или сигналу положения, собранному носимым устройством 130. В некоторых вариантах, устройство 110 обработки может также определить, является ли действие пользователя правильным, на основе сигнала действия пользователя. Например, устройство 110 обработки может определить, является ли действие пользователя правильным, на основе информации о характеристиках (например, амплитудной информации, частотной информации и т.п.), соответствующей EMG-сигналу. В качестве другого примера, устройство 110 обработки может определить, является действие пользователя правильным, на основе информации о характеристиках (например, угловой скорости, направления угловой скорости, ускоренной угловой скорости, угла, информации о смещении, напряжения и т.п.), соответствующей сигналу положения. В качестве другого примера, устройство 110 обработки может определить, является ли действие пользователя правильным, на основе информации о характеристиках, соответствующей EMG-сигналу, и информации о характеристиках, соответствующей сигналу положения. В некоторых вариантах, устройство 110 обработки может также определить, удовлетворяет ли информация о физиологических параметрах во время движения пользователя стандарту здоровья. В некоторых вариантах, устройство 110 обработки может также передать команду передать сигнал обратной связи относительно движения пользователя. Например, когда пользователь бегает, система 100 контроля движения может осуществлять контроль того, что продолжительность бега пользователя слишком велика. В это время, устройство 110 обработки может передать устройству 140 мобильного терминала команду, что следует предложить пользователю скорректировать время бега. Следует отметить, что информация о характеристиках, соответствующая сигналу положения, может не быть ограничена угловой скоростью, направлением угловой скоростью, ускоренной угловой скоростью, углом, информацией о смещении, напряжением и т.п., и может быть также другая информация о характеристиках. Любая информация о параметрах, конфигурированная для отражения относительного движения тела пользователя, может представлять собой информацию о характеристиках, соответствующую сигналу положения. Например, когда датчик положения представляет собой датчик натяжения, угол сгиба и направление сгиба сустава пользователя могут быть получены путем измерения значения сопротивления датчика, которая изменяется при изменении длины растяжения.
В некоторых вариантах, устройство 110 обработки может быть локальным или удаленным. Например, устройство 110 обработки может обращаться и получать доступ к различной информации и/или к информации, сохраняемой в носимом устройстве 130 и/или в устройстве 140 мобильного терминала, через сеть 120 связи. В некоторых вариантах, устройство 110 обработки может быть напрямую соединено с носимым устройством 130 и/или с устройством 140 мобильного терминала для доступа к сохраняемой информации и/или данным. Например, устройство 110 обработки может быть расположено в носимом устройстве 130 и реализовывать информационное взаимодействие с устройством 140 мобильного терминала через сеть 120 связи. В качестве другого примера, устройство 110 обработки может быть расположено в устройстве 140 мобильного терминала и реализовывать информационное взаимодействие с носимым устройством 130 через сеть связи. В некоторых вариантах, устройство 110 обработки может быть реализовано на облачной платформе.
В некоторых вариантах, устройство 110 обработки может обрабатывать данные и/или информацию, относящуюся к контролю движения, для осуществления одной или нескольких функций, рассматриваемых в настоящем изобретении. В некоторых вариантах, устройство 110 обработки может получать сигнал действия, собранный носимым устройством 130 во время движения пользователя. В некоторых вариантах, устройство 110 обработки может передавать управляющие команды носимому устройству 130 или устройству 140 мобильного терминала. Эти управляющие команды могут управлять носимым устройством 130 и его датчиком для включения или выключения устройства и/или датчика, и могут также управлять устройством 140 мобильного терминала для передачи информации подсказок и предложений. В некоторых вариантах, устройство 110 обработки может содержать одно или несколько вспомогательных устройств обработки (например, одноядерное устройство обработки или многоядерное-многокристальное устройство обработки).
Сеть 120 связи может способствовать обмену данными и/или информацией в системе 100 контроля движения. В некоторых вариантах, один или несколько компонентов системы 100 контроля движения могут передавать данные и/или информацию другому компоненту(ам) системы 100 контроля движения через сеть 120 связи. Например, сигнал действия, собранный носимым устройством 130, может быть передан устройству 110 обработки через сеть 120 связи. В качестве другого примера, результат подтверждения сигнала действия в устройстве 110 обработки может быть передан устройству 140 мобильного терминала через сеть 120 связи. В некоторых вариантах, сеть 120 связи может представлять собой проводную или беспроводную сеть связи любого типа или комбинацию таких сетей.
Носимое устройство 130 может представлять собой предмет одежды или какое-либо другое устройство с функцией ношения. В некоторых вариантах, носимое устройство 130 может представлять собой, без ограничений, устройство 130-1, встроенное в предмет одежды для верхней части тела, устройство 130-2, встроенное в брюки, устройство 130-3 в браслете, устройство 130-4 в обуви и т.д. В некоторых вариантах, носимое устройство 130 может содержать несколько датчиков. Эти датчики могут получать различные сигналы действий (например, EMG-сигнал, сигнал положения, информацию о температуре, информацию о сердечных сокращениях, сигнал ЭКГ (ECG) и т.п.) во время движения пользователя. В некоторых вариантах, такой датчик может представлять собой, без ограничений, датчик EMG, датчик положения, датчик температуры, датчик влажности, датчик ЭКГ (ECG), датчик насыщения крови кислородом, датчик Холла, датчик электрических характеристик кожи, датчик поворота или другой подобный датчик, либо комбинацию датчиков. Например, датчик EMG может располагаться в позиции мускула (например, бицепса, трицепса, широчайшей мышцы спины, трапециевидной мышцы и т.п.) на теле человека в устройстве 130-1, встроенном в одежду для верхней части тела. Датчик EMG может быть подогнан к коже пользователя и собирать EMG-сигнал во время движения пользователя. В качестве другого примера, датчик ЭКГ (ECG) может быть расположен возле левой грудной мышцы тела человека в устройстве 130-1, встроенном в одежду для верхней части тела. Этот датчик ЭКГ (ECG) может собирать сигнал электрокардиограммы пользователя. В качестве другого примера, датчик положения может быть помещен в позиции мускулов (например, большой ягодичной мышцы, латеральной широкой мышцы бедра, медиальной широкой мышцы бедра, икроножной мышцы и т.п.) тела человека. Датчик положения может собирать сигнал положения пользователя. В некоторых вариантах, носимое устройство 130 может также передавать сигнал обратной связи относительно действий пользователя. Например, когда действие некоторой части тела пользователя во время движения не соответствует стандарту, датчик EMG, соответствующий этой части тела, может генерировать сигнал стимуляции (например, стимуляцию электрическим током или сигнал нажатия) для напоминания пользователю.
Следует отметить, что возможные варианты носимого устройства 130 не исчерпываются устройством 130-1, встроенным в предмет одежды для верхней части тела, устройством 130-2, встроенным в брюки, устройством 130-3 в браслете и устройством 130-4 в обуви, показанными на фиг. 1, и могут также представлять собой другие устройства в местах, подлежащих контролю, такие как устройство в шлеме, устройство в наколеннике и т.п., что здесь никак не ограничено. Любое устройство, которое может использовать способ контроля движения, предлагаемый настоящим изобретением, попадает в объем защиты настоящего изобретения.
В некоторых вариантах, устройство 140 мобильного терминала может получать информацию или данные от системы 100 контроля движения. В некоторых вариантах, устройство 140 мобильного терминала может принимать данные движения, обработанные устройством 110 обработки, и запись движения может быть передана по обратной связи назад на основе обработанных данных движения или другой подобной информации. К примерам способов обратной связи могут относиться, не ограничиваясь этим, голосовая подсказка (предложение), подсказка посредством изображения, представление видео на дисплее, текстовая подсказка и т.п. В некоторых вариантах, пользователь может получить запись действия в процессе движения этого пользователя с использованием устройства 140 мобильного терминала. Например, устройство 140 мобильного терминала может быть соединено (например, через проводное соединение или беспроводное соединение) с носимым устройством 130 через сеть 120 связи. Пользователь может получить запись действия в процессе движения этого пользователя на основе устройства 140 мобильного терминала. Эта запись действия может быть передана устройству 110 обработки через устройство 140 мобильного терминала. В некоторых вариантах, устройство 140 мобильного терминала может представлять собой мобильное устройство 140-1, планшетный компьютер 140-2, портативный компьютер 140-3 или другое подобное устройство, либо какую-то комбинацию таких устройств. В некоторых вариантах, мобильное устройство 140-1 может представлять собой мобильный телефон, интеллектуальное домашнее устройство, интеллектуальное мобильное устройство, устройство виртуальной реальности, устройство дополненной реальности или другое подобное устройство, либо какую-то комбинацию таких устройств. В некоторых вариантах, интеллектуальное домашнее устройство может представлять собой устройство управления «разумной» электроаппаратурой, интеллектуальное устройство для контроля, интеллектуальный телевизор, интеллектуальную видеокамеру или другое подобное устройство, либо какую-то комбинацию таких устройств. В некоторых вариантах, интеллектуальное мобильное устройство может представлять собой смартфон, персональный цифровой помощник (personal digital assistant (PDA)), игровое устройство, навигатор, кассовый аппарат (point of sale (POS)) или другое подобное устройство, либо какую-то комбинацию таких устройств. В некоторых вариантах, устройство виртуальной реальности и/или устройство дополненной реальности может представлять собой шлем виртуальной реальности, очки виртуальной реальности, патч для виртуальной реальности, шлем дополненной реальности, очки дополненной реальности, патч дополненной реальности или другое подобное устройство, либо какую-то комбинацию таких устройств.
В некоторых вариантах, система 100 контроля движения может также содержать базу данных. Эта база данных может сохранять данные (например, первоначально заданные пороговые условия и т.п.) и/или команды (например, команды обратной связи). В некоторых вариантах, база данных может сохранять данные, полученные от носимого устройства 130 и/или от устройства 140 мобильного терминала. В некоторых вариантах, база данных может сохранять данные и/или команды для выполнения или использования процессором устройства 110 с целью осуществления примеров способов, описываемых в настоящем изобретении. В некоторых вариантах, эта база данных может быть соединена с сетью 120 связи для осуществления связи с одним или несколькими компонентами (например, устройством 110 обработки, носимым устройством 130, устройством 140 мобильного терминала и т.п.) системы 100 контроля движения. Эти один или несколько компонентов системы 100 контроля движения могут обращаться и получать доступ к данным или командам, сохраняемым в базе данных, через сеть 120 связи. В некоторых вариантах, база данных может быть непосредственно соединена или осуществлять связь с одним или несколькими компонентами в системе 100 контроля движения. В некоторых вариантах, база данных может быть частью устройства 110 обработки.
На фиг. 2 представлена упрощенная схема, иллюстрирующая пример компонентов аппаратуры и/или программного обеспечения в примере носимого устройства 130 согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 2, носимое устройство 130 может содержать модуль 210 сбора данных, модуль 220 обработки (также называемый процессором), модуль 230 управления (также называемый главным модулем управления, микроконтроллерным модулем (micro controller unit (MCU), контролером), модуль 240 связи, модуль 250 источника питания, и модуль 260 ввода/вывода.
Модуль 210 сбора данных может быть конфигурирован для получения сигнала действия во время движения пользователя. В некоторых вариантах, этот модуль 210 сбора данных может содержать блок датчиков. Этот блок датчиков может быть конфигурирован для получения одного или нескольких сигналов действия во время движения пользователя. В некоторых вариантах, блок датчиков может содержать, не ограничиваясь этим, датчик EMG, датчик положения, датчик ЭКГ (ECG), датчик дыхания, датчик температуры, датчик влажности, инерциальный датчик, датчик насыщения крови кислородом, датчик Холла, датчик электрических характеристик кожи, датчик поворота или другой подобный датчик, либо какую-то комбинацию таких датчиков. В некоторых вариантах, сигнал действия может представлять собой EMG-сигнал, сигнал положения, сигнал ЭКГ (ECG), сигнал частоты дыхания, сигнал температуры, сигнал влажности или другой подобный сигнал, либо какую-то комбинацию таких сигналов. Блок датчиков может быть помещен в разных местах в носимом устройстве 130 в зависимости от типа сигнала действия. Например, в некоторых вариантах, датчик EMG (также называемый электродным компонентом) может быть расположен в позиции мускула на теле человека, и этот датчик EMG может быть конфигурирован для сбора EMG-сигнала во время движения пользователя. Этот EMG-сигнал и информация о характеристиках, соответствующая этому EMG-сигналу, (например, частотная информация, амплитудная информация и т.п.) может отражать состояние соответствующего мускула во время движения пользователя. Датчик положения может быть расположен в разных позициях (например, позициях в носимом устройстве 130, соответствующих торсу, конечности и суставу) на теле человека, и этот датчик положения может быть конфигурирован для сбора сигнала положения во время движения пользователя. Сигнал положения и информация о характеристиках (например, направление угловой скорости, значение угловой скорости, ускоренное значение угловой скорости, угол, информация о смещении, напряжение и т.п.), соответствующая сигналу положения, могут отражать положение тела пользователя во время движения. Датчик ЭКГ (ECG) может быть расположен в позиции вокруг грудной клетки тела человека. Этот датчик ЭКГ (ECG) может быть конфигурирован для сбора данных электрокардиограммы (ECG) во время движения пользователя. Датчик дыхания может быть расположен в позиции вокруг грудной клетки тела человека. Этот датчик дыхания может быть конфигурирован для сбора данных о дыхании (например, частоты дыхания, амплитуды дыхания и т.п.) во время движения пользователя. Датчик температуры может быть конфигурирован для сбора данных о температуре (например, о температуре поверхности тела) во время движения пользователя. Датчик влажности может быть конфигурирован для сбора данных о влажности во внешней окружающей среде.
Модуль 220 обработки может обрабатывать данные от модуля 210 сбора данных, модуля 230 управления, модуля 240 связи, модуля 250 источника питания и/или модуля 260 ввода/вывода. Например, модуль 220 обработки может обрабатывать сигнал действия от модуля 210 сбора данных во время движения пользователя. В некоторых вариантах, модуль 220 обработки может осуществлять предварительную обработку сигнала действия (например, EMG-сигнала и сигнала положения), полученного модулем 210 сбора данных. Например, модуль 220 обработки может осуществлять сегментационную обработку EMG-сигнала или сигнала положения во время движения пользователя. В качестве другого примера, модуль 220 обработки может осуществлять предварительную обработку (например, фильтрационную обработку или обработку коррекции сигнала) применительно к EMG-сигналу во время движения пользователя, чтобы повысить качество EMG-сигнала. В качестве другого примера, модуль 220 обработки может определять информацию о характеристиках, соответствующую сигналу положения, на основе сигнала положения во время движения пользователя. В некоторых вариантах, модуль 220 обработки может обрабатывать команды или операции от модуля 260 ввода/вывода. В некоторых вариантах, обработанные данные могут быть сохранены в запоминающем устройстве или на жестком диске. В некоторых вариантах, модуль 220 обработки может передавать обработанные данные через модуль 240 связи или сеть 120 связи одному или нескольким компонентам в системе 100 контроля движения. Например, модуль 220 обработки может передать результат контроля движения пользователя модулю 230 управления, а этот модуль 230 управления может выполнять последующие операции или команды на основе результата определения действия.
Модуль 230 управления может быть соединен с другими модулями в носимом устройстве 130. В некоторых вариантах, модуль 230 управления может управлять рабочим состоянием других модулей в носимом устройстве 130. Например, модуль 230 управления может управлять состоянием подачи питания (например, нормальный режим, энергосберегающий режим), временем подачи питания, и т.п., модуля 250 источника питания. В качестве другого примера, модуль 230 управления может управлять модулем 260 ввода/вывода на основе результата определения действия пользователя, и затем может управлять устройством 140 мобильного терминала для передачи результата обратной связи относительно движения пользователя. Когда имеет место проблема с действием во время движения пользователя (например, действие не соответствует стандарту), модуль 230 управления может управлять модулем 260 ввода/вывода, и далее может управлять устройством 140 мобильного терминала для передачи сигнала обратной связи пользователю, так что пользователь может знать свой статус движения в реальном времени и регулировать действие. В некоторых вариантах, модуль 230 управления может также управлять одним или несколькими датчиками или другими модулями в модуле 210 сбора данных для передачи сигнала обратной связи для тела человека. Например, когда усилие некоторой части мускулатуры во время движения пользователя слишком велико, модуль 230 управления может управлять электродным модулем в позиции соответствующего мускула для электрической стимуляции пользователя с целью своевременной подсказки пользователю, что он должен скорректировать рассматриваемое действие.
В некоторых вариантах, модуль 240 связи может быть конфигурирован для обмена информацией или данными. В некоторых вариантах, модуль 240 связи может быть конфигурирован для связи между внутренними компонентами носимого устройства 130. Например, модуль 210 сбора данных может передать сигнал действия пользователя (например, EMG-сигнал, сигнал положения и т.п.) модулю 240 связи, и модуль 240 связи может передать сигнал действия модулю 220 обработки. В некоторых вариантах, модуль 240 связи может также быть конфигурирован для связи между носимым устройством 130 и другими компонентами в системе 100 контроля движения. Например, модуль 240 связи может передать информацию о состоянии (например, состоянии переключения) носимого устройства 130 устройству 110 обработки, и устройство 110 обработки может осуществлять контроль носимого устройства 130 на основе информации состояния. Модуль 240 связи может использовать технологию проводной связи, технологию беспроводной (радио) связи или гибридную технологию проводной/беспроводной связи.
В некоторых вариантах, модуль 250 источника питания может подавать питание другим компонентам системы 100 контроля движения.
Модуль 260 ввода/вывода может получать и передавать сигнал. Модуль 260 ввода/вывода может соединяться или осуществлять связь с другими компонентами системы 100 контроля движения. Другие компоненты в системе 100 контроля движения могут быть соединены или осуществлять связь через модуль 260 ввода/вывода.
Следует отметить, что приведенное выше описание системы 100 контроля движения и модулей дано просто для удобства рассмотрения и не может ограничивать один или несколько вариантов настоящего изобретения только объемом этих вариантов. Специалисты в рассматриваемой области, после уяснения принципов настоящего изобретения, могут комбинировать модули различными способами, формировать подсистему для соединения с другими модулями без отклонения от этих принципов, либо исключить один или несколько модулей. Например, модуль 210 сбора данных и модуль 220 обработки могут быть реализованы в виде единого модуля. Этот единый модуль может осуществлять функции получения и обработки сигнала действия пользователя. В качестве другого примера, модуль 220 обработки может быть расположен не в носимом устройстве 130, а интегрирован в устройство 110 обработки. Все такие модификации находятся в пределах объема одного или нескольких вариантов настоящего изобретения.
На фиг. 3 представлена упрощенная схема, иллюстрирующая пример компонентов аппаратуры или программного обеспечения примера компьютерного устройства 300 согласно некоторым вариантам настоящего изобретения. В некоторых вариантах, устройство 110 обработки и/или устройство 140 мобильного терминала может быть установлено в компьютерном устройстве 300. Как показано на фиг. 3, компьютерное устройство 300 может содержать шину 310 внутренней связи, процессор 320, постоянное запоминающее устройство (ПЗУ (read-only memory (ROM))) 330, запоминающее устройство с произвольной выборкой (ЗУПВ (random access memory (RAM))) 340, порт 350 связи, интерфейс 360 ввода/вывода, диск 370 и интерфейс 380 пользователя.
Шина 310 внутренней связи может реализовать передачу данных между компонентами компьютерного устройства 300. Например, процессор 320 может передавать данные в запоминающее устройство или в другие компоненты аппаратуры, такие как интерфейс 360 ввода/вывода, по шине 310 внутренней связи.
Процессор 320 может выполнять компьютерные команды (например, программные коды) и осуществлять функции системы 100 контроля движения, описываемой в настоящем изобретении. Эти компьютерные команды могут представлять собой, например, программы, объекты, компоненты, структуры данных, процедуры, модули и функции, которые осуществляют описываемые здесь конкретные функции. Например, процессор 320 может обрабатывать сигнал действия (например, EMG-сигнал, сигнал положения), получаемый от носимого устройства 130 или/и устройства 140 мобильного терминала из системы 100 контроля движения, и осуществлять контроль действия движения пользователя на основе сигнала действия во время движения пользователя. Только для целей иллюстрации в компьютерном устройстве, показанном на фиг. 3, представлен только один процессор. Однако следует отметить, что компьютерное устройство 300 согласно настоящему изобретению может также содержать несколько процессоров.
Запоминающее устройство в компьютерном устройстве 300 (например, постоянное запоминающее устройство (ПЗУ (ROM)) 330, запоминающее устройство с произвольным доступом (ЗУПВ (RAM)) 340, диск 370 и т.п.) может сохранять данные/информацию, полученную от каких-либо других компонентов в системе 100 контроля движения. В некоторых вариантах, запоминающее устройство в компьютерном устройстве 300 может быть расположено в носимом устройстве 130 или в устройстве 110 обработки. В запоминающем устройстве может также находиться по меньшей мере одно множество команд. Эти команды могут представлять собой компьютерные программы. Эти компьютерные программы могут быть конфигурированы для осуществления функций системы 100 контроля движения согласно настоящему изобретению. Эти компьютерные программы могут представлять собой, например, программы, подпрограммы, объекты, компоненты, структуры данных, процедуры, модули и т.п. для осуществления способа обработки данных движения, предлагаемого в настоящем изобретении.
Интерфейс 360 ввода/вывода может быть конфигурирован для ввода или вывода сигналов, данных или информации. В некоторых вариантах, интерфейс 360 ввода/вывода может позволить пользователю взаимодействовать с системой 100 контроля движения.
Диск 370 может быть конфигурирован для сохранения информации и данных, генерируемых устройством обработки или принимаемых от него. Например, диск 370 может сохранять подтверждающую информацию от пользователя. В некоторых вариантах, диск 370 может быть расположен в устройстве 110 обработки или в носимом устройстве 130. Интерфейс 380 пользователя может реализовать взаимодействие и обмен информацией между компьютерным устройством 300 и пользователем. В некоторых вариантах, интерфейс 380 пользователя может быть конфигурирован для представления записи движения, генерируемой системой 100 контроля движения, пользователю. В некоторых вариантах, интерфейс 380 пользователя может содержать физический дисплей, такой как дисплей с громкоговорителем, жидкокристаллический дисплей (liquid crystal display (LCD)), дисплей на светодиодах (light-emitting diode (LED)), дисплей на органических светодиодах (organic light-emitting diode (OLED)), дисплей с электронными чернилами (E-Ink) и т.п.
На фиг. 4 представлена структурная схема, иллюстрирующая пример носимого устройства согласно некоторым вариантам настоящего изобретения. Для дальнейшего описания носимого устройства в качестве примерной иллюстрации используется верхняя одежда. Как показано на фиг. 4, носимое устройство 400 может содержать предмет 410 одежды для верхней части тела. Этот верхний предмет 410 одежды может содержать подложку 4110 верхнего предмета одежды, по меньшей мере один модуль 4120 обработки предмета одежды, по меньшей мере один модуль 4130 обратной связи предмета одежды, по меньшей мере один модуль 4140 сбора данных предмета одежды и т.п. Подложка 4110 верхнего предмета одежды может представлять собой предмет одежды, носимый на верхней части тела человека. В некоторых вариантах, подложка 4110 верхнего предмета одежды может представлять собой футболку с короткими рукавами, футболку с длинными рукавами, рубашку, верхнюю одежду и т.п. Указанные по меньшей мере один модуль 4120 обработки верхнего предмета одежды и по меньшей мере один модуль 4140 сбора данных предмета одежды могут быть расположены в областях подложки 4110 верхнего предмета одежды, контактирующих с разными участками тела человека. По меньшей мере один модуль 4130 обратной связи верхнего предмета одежды может быть расположен в любой позиции подложки 4110 верхнего предмета одежды. Этот по меньшей мере один модуль 4130 обратной связи верхнего предмета одежды может быть конфигурирован для передачи сигнала обратной связи относительно информации о состоянии движения верхней части тела пользователя. В качестве способа обратной связи могут быть использованы, без ограничений, подсказка голосом, текстовая подсказка, подсказка путем нажатия, стимуляция электрическим током и т.п. В некоторых вариантах, по меньшей мере один модуль 4140 сбора данных верхнего предмета одежды может содержать, не ограничиваясь этим, датчик положения, датчик ЭКГ (ECG), датчик EMG, датчик температуры, датчик влажности, инерциальный датчик, датчик на кислотной основе, преобразователь звуковых волн или другой подобный датчик, либо какую-то комбинацию таких компонентов. Датчик модуля 4140 сбора данных в верхнем предмете одежды может быть помещен в разных позициях на теле пользователя в зависимости от разных сигналов. Например, когда датчик положения конфигурирован для получения сигнала положения во время движения пользователя, этот датчик положения может быть помещен в позиции подложки 4110 верхнего предмета одежды, соответствующей торсу человека, руке или суставу. В качестве другого примера, когда датчик EMG конфигурирован для получения EMG-сигнала во время движения пользователя, этот датчик EMG может быть расположен возле мускула пользователя. В некоторых вариантах, датчик положения может содержать, без ограничений, трехосный датчик ускорения, трехосный датчик угловой скорости, датчик магнитного поля или другой подобный датчик, либо какую-то комбинацию таких датчиков. Например, датчик положения может содержать трехосный датчик ускорения и трехосный датчик угловой скорости. В некоторых вариантах, датчик положения может также содержать датчик натяжения. Этот датчик натяжения может представлять собой датчик, использующий натяжение, генерируемое при деформации предмета под воздействием силы. В некоторых вариантах, датчик натяжения может содержать, не ограничиваясь этим, датчик напряжения типа датчика натяжения, датчик давления типа датчика натяжения, датчик крутящего момента типа датчика натяжения, датчик смещения на основе датчика натяжения, датчик ускорения типа датчика натяжения или другой подобный датчик, либо какую-то комбинацию таких датчиков. Например, датчик натяжения может быть расположен в позиции сустава пользователя. Угол сгиба и направление сгиба сустава пользователя могут быть получены путем измерения значения электрического сопротивления датчика натяжения, изменяющегося при изменениях степени растяжения. Следует отметить, что в дополнение к упомянутой выше подложке 4110 верхнего предмета одежды, модулю 4120 обработки предмета одежды, модулю 4130 обратной связи предмета одежды и модулю 4140 сбора данных предмета одежды верхний предмет 410 одежды может также содержать другие модули, такие как модуль источника питания, модуль связи, модуль ввода/вывода и т.п. Модуль 4120 обработки предмета одежды может быть аналогичен модулю 220 обработки, показанному на фиг. 2. Модуль 4140 сбора данных предмета одежды может быть аналогичен модулю 210 сбора данных, показанному на фиг. 2. Подробное описание для каждого модуля в верхнем предмете 410 одежды может соответствовать описанию фиг. 2, что здесь можно не повторять.
На фиг. 5 представлена логическая схема, иллюстрирующая пример процедуры контроля движения согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 5, процедура 500 может содержать следующие операции.
В ходе операции 510, может быть получен сигнал действия во время движения пользователя.
В некоторых вариантах, операция 510 может быть осуществлена модулем 210 сбора данных. Сигнал действия может быть связан с информацией о параметрах тела человека во время движения пользователя. В некоторых вариантах, информация о параметрах тела человека может содержать, не ограничиваясь этим, сигнал EMG, сигнал положения, сигнал ЭКГ (ECG), сигнал температуры, сигнал влажности, концентрацию кислорода в крови, частоту дыхания или другой подобный параметр, либо какую-то комбинацию таких параметров. В некоторых вариантах, датчик EMG в модуле 210 сбора данных может собирать EMG-сигнал во время движения пользователя. Например, когда пользователь сжимает грудную клетку в положении «сидя», датчик EMG, соответствующий положению грудной мышцы, широчайшей мышцы спины и т.п. на теле человека, в носимом устройстве, может собирать EMG-сигнал от позиции соответствующего мускула пользователя. В качестве другого примера, когда пользователь приседает на корточки, датчик EMG, соответствующий положению большой ягодичной мышцы, четырехглавой мышцы и т.п. на теле человека в носимом устройстве, может собирать EMG-сигнал от позиции соответствующего мускула пользователя. В качестве другого примера, когда пользователь бегает, датчик EMG, соответствующий положению икроножной мышцы и т.п. на теле человека, в носимом устройстве, может собирать EMG-сигнал от позиции, соответствующей икроножной мышце и т.п. в теле человека. В некоторых вариантах, датчик положения в модуле 210 сбора данных может собирать сигнал положения во время движения пользователя. Например, когда пользователь выжимает штангу в положении «лежа», датчик положения, соответствующий позиции трицепса и т.п. на теле человека, в носимом устройстве, может собирать сигнал положения от позиции трицепса и т.п. пользователя. В качестве другого примера, когда пользователь выполняет упражнения с гантелями, датчик положения, расположенный в позиции дельтовидной мышцы, и т.п., на теле человека, может собирать сигнал положения из позиции дельтовидной мышцы. В некоторых вариантах, в модуле 210 сбора данных могут быть несколько датчиков положения. Эти несколько датчиков положения могут получать сигналы положения от нескольких частей тела во время движения пользователя. Эти сигналы положения от нескольких частей тела могут отражать относительное движение между разными частями тела человека. Например, сигнал положения от руки и сигнал положения от торса могут отражать движение руки относительно торса. В некоторых вариантах, сигнал положения может быть ассоциирован с типом датчика положения. Например, когда датчик положения представляет собой трехосный датчик угловой скорости, полученный сигнал положения может представлять информацию об угловой скорости. В качестве другого примера, когда датчик положения представляет собой трехосный датчик угловой скорости и трехосный датчик ускорения, полученный сигнал положения может представлять информацию об угловой скорости и информацию об ускорении. В качестве другого примера, когда датчик положения представляет собой датчик натяжения, этот датчик натяжения может быть расположен в позиции сустава пользователя. При измерении значения электрического сопротивления датчика натяжения, которая изменяется при изменении длины в растянутом состоянии, полученный сигнал положения может нести информацию о смещении, механическом напряжении и т.п. Посредством этих сигналов положения можно охарактеризовать угол сгиба и направление сгиба сустава пользователя. Следует отметить, что информация о параметрах, конфигурированная для отражения относительного движения тела пользователя, может представлять собой информацию о характеристиках, соответствующую сигналу положения. Для получения типа информации о характеристиках могут быть использованы датчики положения разных типов.
В некоторых вариантах, сигнал действия может содержать EMG-сигнал от конкретной части тела пользователя и сигнал положения этой конкретной части. Эти EMG-сигнал и сигнал положения могут отражать состояние движения указанной конкретной части тела пользователя с разных углов. Другими словами, сигнал положения рассматриваемой конкретной части тела пользователя может отражать тип действия, амплитуду действия, частоту действия и т.п. этой конкретной части тела. Указанный EMG-сигнал может отражать состояние мускулатуры рассматриваемой конкретной части тела во время движения. В некоторых вариантах, такой EMG-сигнал и/или сигнал позиции одной и той же части тела могут позволить лучше оценить, является ли действие этой части тела нормальным.
В ходе операции 520 контроль действия движения пользователя может осуществляться на основе по меньшей мере информации о характеристиках, соответствующей EMG-сигналу, или информации о характеристиках, соответствующей сигналу положения.
В некоторых вариантах, эта операция может осуществляться модулем 220 обработки и/или устройством 110 обработки. В некоторых вариантах, информация о характеристиках, соответствующая EMG-сигналу, может содержать, не ограничиваясь этим, частотную информацию, амплитудную информацию или другую подобную информацию, либо какую-то комбинацию такой информации. Информация о характеристиках, соответствующая сигналу положения, может относиться к информации о параметрах, конфигурированной для того, чтобы охарактеризовать относительное движение тела пользователя. В некоторых вариантах, информация о характеристиках, соответствующая сигналу положения, может содержать, не ограничиваясь этим, направление угловой скорости, значение угловой скорости, ускорение угловой скорости или другой подобный параметр, либо какую-то комбинацию таких параметров. В некоторых вариантах, информация о характеристиках, соответствующая сигналу положения, может также содержать угол, информацию о смещении (например, для датчика натяжения в растянутом состоянии), механическое напряжение и т.п. Например, когда датчик положения представляет собой датчик натяжения, этот датчик натяжения может быть расположен рядом с позицией сустава пользователя. При измерении значения электрического сопротивления датчика натяжения, которая изменяется при изменении длины растяжения датчика, полученный сигнал положения может представлять информацию о смещении, механическое напряжение и т.п. Эти сигналы положения позволяют охарактеризовать угол сгиба и направление сгиба сустава пользователя. В некоторых вариантах, модуль 220 обработки и/или устройство 110 обработки может извлекать информацию о характеристиках (например, частотную информацию, амплитудную информацию), соответствующую EMG-сигналу, или информацию о характеристиках (например, направление угловой скорости, значение угловой скорости, значение ускорения угловой скорости, угол, информацию о смещении, механические напряжения и т.п.), соответствующую сигналу положения, и осуществлять контроль действия движения пользователя на основе информации о характеристиках, соответствующей EMG-сигналу, и информации о характеристиках, соответствующей сигналу положения. Процедура контроля действия движения пользователя может содержать контроль информации относительно действия пользователя. В некоторых вариантах, информация, относящаяся к действию, может содержать указание типа действия, числа действий и качества действий (например, удовлетворяет ли действие пользователя стандарту), время действия или другую подобную информацию, либо какую-то комбинацию этих параметров. Тип действия может обозначать действие при занятиях фитнесом, осуществляемое пользователем в процессе движения. В некоторых вариантах, тип действия может представлять собой, не ограничиваясь этим, сжатие грудной клетки в положении «сидя», приседание на корточки, подъем тяжестей, лежание ровно на плоскости, бег, плавание или другое подобное движение, либо какую-то комбинацию таких действий. Число действий может обозначать число раз, когда пользователь выполняет соответствующее действие во время движения. Например, пользователь может осуществлять 10 раз сжатие грудной клетки в положении «сидя», и 10 может обозначать число таких действий. Качество действия может обозначать степень соответствия стандарту для действия в процессе занятий фитнесом, осуществляемого пользователем, по сравнению со стандартным качеством занятий фитнесом. Например, когда пользователь приседает, устройство 110 обработки может определить тип действия пользователя на основе информации о характеристиках, соответствующей сигналу действия (например, EMG-сигналу и сигналу положения) для конкретной позиции в мускулатуре (например, большой ягодичной мышцы, четырехглавой мышцы и т.п.) и определить качество действия приседания пользователя на основе сигнала действия для стандартного действия приседания. Время действия может обозначать время, соответствующее одному или нескольким типам действия пользователя, или общее время процесса движения.
В некоторых вариантах, система 100 контроля движения может также осуществлять «гладкую» обработку EMG-сигнала, в ходе которой этот EMG-сигнал обрабатывают как гладкую кривую данных с целью представления этого EMG-сигнала пользователю на дисплее для визуального наблюдения, так что пользователь может осуществлять контроль процесса движения. В некоторых вариантах, когда получен сигнал действия пользователя, другая информация о физиологических параметрах (например, сигнал сердечных сокращений) пользователя и внешние условия, такие как относительное перемещение или вытягивание между модулем 210 сбора данных и телом человека во время движения, может отрицательно повлиять на качество этого сигнала действия, например, вызвать появление в EMG-сигнале аномального сигнала, такого как скачкообразный сигнал, пропуск сигнала, сигнал насыщения, колебательный сигнал, полученный с использованием фильтра верхних частот, и т.п. и повлиять на контроль действия пользователя. Для удобства описания скачкообразный сигнал в EMG-сигнале может быть описан как точка сингулярности. К примерам такой точки сингулярности могут относиться пичковый сигнал, разрыв сигнала или другой подобный объект. В некоторых вариантах, во время движения вибрация, вызванная сердечными сокращениями пользователя, может привести к появлению скачкообразного сигнала в EMG-сигнале на короткое время. В некоторых вариантах, пользователь может регулировать положение носимого устройства 130 во время движения, например, натягивать одежду, натягивать рукава и т.п., что может вызвать появление скачкообразного сигнала в EMG-сигнале на короткое время. В некоторых вариантах, возможно неправильное ношение носимого устройства 130, например, одежда может не быть хорошо подобрана, так что некоторые EMG-датчики могут иметь плохой контакт кратковременно или в течение продолжительного времени, что может вызвать появление скачкообразного сигнала в EMG-сигнале кратковременно или в течение продолжительного времени. В некоторых вариантах, во время движения пользователя могут появляться артефакты движения. Эти артефакты движения могут быть связаны с шумовым сигналом, генерируемым при движении мускулов относительно модуля EMG во время движения пользователя в процессе получения EMG-сигнала. Такие артефакты движения могут привести к появлению скачкообразного сигнала в EMG-сигнале кратковременно или в течение продолжительного времени. В некоторых вариантах, возможно неправильное ношение носимого устройства 130, например, одежда может не быть хорошо подобрана, так что некоторые EMG-датчики могут иметь плохой контакт кратковременно или в течение продолжительного времени, что может вызвать появление пропуска в EMG-сигнале или насыщение в EMG-сигнале. Когда положительный электрод и отрицательный электрод датчика EMG имеют плохой контакт, эти положительный электрод и отрицательный электрод не смогут, возможно, собрать правильный EMG-сигнал. В это время может возникать явление пропуска сигнала в EMG-сигнале, иными словами возможен пропуск сигнала в EMG-сигнале. Когда часть положительного электрода и отрицательного электрода в датчике EMG имеет плохой контакт, эта часть положительного электрода и отрицательного электрода может собирать EMG-сигнал, а другая часть положительного электрода и отрицательного электрода могут собирать сигнал частоты питания. Поскольку амплитуда сигнала частоты питания намного выше амплитуды EMG-сигнала, возможно появление сигнала насыщения в EMG-сигнале, иными словами, возможно явление, когда амплитуда сигнала слишком великом, так что возможно достижение насыщенного состояния. В некоторых вариантах, система 100 контроля движения может осуществлять устранения постоянной составляющей (direct current (DC)) EMG-сигнала с использованием фильтра верхних частот, что может вызвать появление колебательного сигнала в EMG-сигнале после устранения постоянной составляющей (DC).
Для улучшения восприятия пользователем система 100 контроля движения может также осуществлять способ обработки данных движения для идентификации аномального сигнала в EMG-сигнале и корректировать идентифицированный аномальный сигнал, чтобы сделать скорректированный аномальный сигнал соответствующим сигналу действия во время фактического движения пользователя, тем самым улучшая восприятие пользователем. Способ обработки данных движения и система контроля движения могут также напомнить пользователю, что он носит устройство неправильно, во время, когда идентифицирован аномальный сигнал, что делает сбор данных более точным. Этот способ обработки данных движения может быть осуществлен устройством 110 обработки, или носимым устройством 130. В частности, способ обработки данных движения может быть осуществлен модулем 220 обработки в носимом устройстве 130, или в устройстве 140 мобильного терминала. Для удобства представления последующее описание может быть иллюстрировано с использованием способа обработки данных движения, осуществляемого модулем 220 обработки в носимом устройстве 130, в качестве примера. В это время, сигнал действия, собранный модулем сбора данных в носимом устройстве 130, может быть напрямую передан модулю 220 обработки для обработки данных, так что может не быть необходимости передавать эти данные устройству 110 обработки или устройству 140 мобильного терминала через сеть связи, что способствует уменьшению времени передачи данных, повышает эффективность обработки данных движения и далее улучшает характеристики обработки данных движения в реальном времени.
На фиг. 6 представлена логическая схема, иллюстрирующая пример процедуры 6000 для обработки данных движения согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 6, процедура 6000 может содержать следующие операции.
В ходе операции 6200, сигнал электромиографии (EMG), соответствующий позиции проведения измерений во время движения пользователя, может быть получен в реальном времени.
Этот EMG-сигнал может быть собран модулем 210 сбора данных. В некоторых вариантах, датчик EMG в модуле 210 сбора данных может собирать EMG-сигнал во время движения пользователя. Например, когда пользователь сжимает грудную клетку в положении «сидя», датчик EMG, соответствующий позиции грудной мышцы, широчайшей мышцы спины и т.п. тела человека, в носимом устройстве может собрать EMG-сигнал, соответствующий положению мускула пользователя. В качестве другого примера, когда пользователь приседает, датчик EMG, соответствующий позиции большой ягодичной мышцы, четырехглавой мышцы и т.п., в теле человека, в носимом устройстве, может собирать EMG-сигнал, соответствующий положению мускула пользователя. В качестве другого примера, когда пользователь бегает, датчик EMG, соответствующий позиции икроножной мышцы и т.п. в теле человека, в носимом устройстве, может собирать EMG-сигнал, из позиции. Этот EMG-сигнал может отражать состояние мускулов в конкретной части тела во время движения пользователя. Во время работы в реальном времени, модуль 220 обработки может периодически получать EMG-сигнал от модуля 210 сбора данных в течение короткого периода времени.
В некоторых вариантах, этот EMG-сигнал может представлять собой сигнал, непосредственно собираемый датчиком EMG в модуле 210 сбора данных. В некоторых вариантах, этот EMG-сигнал может также представлять собой сигнал, получаемый в результате применения алгоритма удаления постоянной составляющей (DC) к сигналу, непосредственно собираемому датчиком EMG. Этот алгоритм удаления постоянной составляющей (DC) может устранять постоянную (DC) составляющую из EMG-сигнала для вычислений. Алгоритм удаления составляющей DC может представлять собой по меньшей мере один из алгоритмов – алгоритм устранения усреднения или алгоритм фильтрации верхних частот или другой подобный алгоритм, либо какую-то комбинацию таких алгоритмов. Для обеспечения характеристик в реальном времени такого алгоритма для удаления постоянной (DC) составляющей, алгоритм устранения усреднения может осуществлять устранение усреднения кадр за кадром.
При устранении постоянной составляющей из EMG-сигнала с использованием алгоритма удаления постоянной составляющей, после устранения усреднения применительно к аномальному сигналу, может появиться новый аномальный сигнал на месте прежнего аномального сигнала. При устранении постоянной составляющей из EMG-сигнала с использованием фильтра верхних частот в месте изменения фактического сигнала может появиться колебательный сигнал. В дополнение к этому использование фильтра верхних частот может привести к тому, что в EMG-сигнале появится задержка сходимости на ранней стадии. Колебательный сигнал также является аномальным сигналом, что может также повлиять на контроль движения пользователя.
При исследовании фильтра верхних частот было обнаружено, что чем ниже частота среза, используемая фильтром верхних частот, тем ниже скорость сходимости и тем больше времени занимает сходимость на ранней стадии, результатом чего является увеличенная задержка сходимости сигнала и ухудшенные характеристики в реальном времени. Напротив, чем выше частота среза, используемая фильтром верхних частот, тем больше скорость сходимости и тем меньшее время занимает сходимость на ранней стадии, что ведет к меньшей задержке сходимости сигнала и к улучшению характеристик в реальном времени. В то же время, чем ниже частота среза, используемая фильтром верхних частот, тем меньше может быть амплитуда колебаний колебательного сигнала, созданного фильтром верхних частот, и тем меньшую длительность может иметь колебательный сигнал. Напротив, чем выше частота среза верхних частот, тем больше может быть амплитуда колебаний колебательного сигнала, создаваемого фильтром верхних частот, и тем больше может быть длительность колебательного сигнала. Для обеспечения характеристик EMG-сигнала в реальном времени модуль 220 обработки может установить заданный диапазон задержки сходимости на основе характеристик в реальном времени, и определить целевой диапазон частоты среза на основе соотношения между частотой среза, скоростью сходимости и задержкой сходимости.
В ходе операции 6400, аномальный сигнал в EMG-сигнале может быть определен на основе этого EMG-сигнала.
В некоторых вариантах, операция 6400 может содержать предварительную обработку EMG-сигнала в частотной области или во временной области. Информация о характеристиках, соответствующая EMG-сигналу, может быть получена на основе предварительно обработанного EMG-сигнала, это позволяет определить аномальный сигнал в EMG-сигнале и осуществлять контроль действия движения пользователя. В частности, операция 6400 может содержать следующие операции.
В ходе операции 6420, указанный EMG-сигнал может быть обработан во временной области для определения аномального сигнала; или
В ходе операции 6440, указанный EMG-сигнал может быть обработан в частотной области для определения аномального сигнала.
На фиг. 7 представлена логическая схема, иллюстрирующая пример процедуры обработки EMG-сигнала во временной области согласно некоторым вариантам настоящего изобретения. На фиг. 7 показана операция 6420. Как показано на фиг. 7, операция 6420 может содержать следующие операции.
В ходе операции 6422, на основе окна временной области для EMG-сигнала может быть определено по меньшей мере одно временное окно из окна временной области для этого EMG-сигнала.
Каждое окно из совокупности по меньшей мере из одного временного окна может покрывать свой, отличный от других окон совокупности временной интервал. В некоторых вариантах, окно временной области может содержать по меньшей мере одно конкретное окно. Под конкретным окном можно понимать окно с конкретной протяженностью во времени, выбранное в пределах окна временной области. Например, когда протяженность во времени окна временной области в EMG-сигнале составляет 3 секунды, протяженность во времени конкретного окна может составлять 100 миллисекунд. В некоторых вариантах, конкретное окно может содержать совокупность по меньшей мере из одного или более разных временных окон. В некоторых вариантах, конкретное окно может содержать одно временное окно. В некоторых вариантах, конкретное окно может содержать несколько временных окон. Когда рассматриваемое конкретное окно содержит несколько временных окон, просто в качестве примера, это конкретное окно может содержать первое временное окно и второе временное окно. Первое временное окно может представлять собой окно, соответствующее части протяженности во времени конкретного окна. Например, когда протяженность во времени конкретного окна составляет 100 миллисекунд, протяженность во времени первого временного окна может быть равна 80 миллисекунд. Второе временное окно может представлять собой другое окно, занимающее часть протяженности конкретного окна. Например, когда конкретное окно равно 100 миллисекунд, второе временное окно может занимать 20 миллисекунд. В некоторых вариантах, первое временное окно и второе временное окно могут быть последовательными временными окнами в одном и том же конкретном окне. В некоторых вариантах, первое временное окно и второе временное окно могут быть непоследовательными или накладывающимися одно на другое временными окнами в одном и том же конкретном окне. В некоторых вариантах, модуль 220 обработки может, на основе окна временной области для EMG-сигнала, осуществлять скольжение и обновление конкретного окна последовательно от стартовой временной точки рассматриваемого окна временной области для EMG-сигнала на основе конкретной протяженности во времени, и может далее разбивать обновленное конкретное окна на первое окно и второе окно. Конкретная протяженность во времени, упомянутая здесь, может быть меньше 1 секунды, 2 секунд, 3 секунд и т.д. Например, модуль 220 обработки может выбрать конкретное окно с конкретной протяженностью во времени, составляющей 100 миллисекунд, и разбить это конкретное окно на первое временное окно, составляющее 80 миллисекунд, и второе временное окно, составляющее 20 миллисекунд. Далее, конкретное окно может быть обновлено путем скольжения вдоль оси времени. Расстояние скольжения может быть равно протяженности во времени второго окна (например, 20 миллисекунд), либо может иметь другую подходящую протяженность во времени, такую как 30 миллисекунд, 40 миллисекунд и т.д. Как отмечено выше, каждое из разных временных окон может занимать свой, отличный от других окон временной интервал. Для удобства описания, временной интервал, занимаемый первым временным окном, может быть определен как предыдущее временное окно, а временной интервал, занимаемый вторым временным окном, может быть определен как последующее временное окно. Иными словами, временной интервал, соответствующий первому временному окну, может предшествовать временному интервалу, соответствующему второму временному окну.
В некоторых вариантах, протяженность во времени, соответствующая первому временному окну, может быть больше протяженности во времени, соответствующей второму временному окну. В некоторых вариантах, конкретная протяженность во времени, соответствующая конкретному окну, может быть меньше 1 секунды. В некоторых вариантах, отношение протяженности во времени, соответствующей первому временному окну, к протяженности во времени, соответствующей второму временному окну, может быть больше 2. В некоторых вариантах, выбор протяженности во времени, соответствующей первому временному окну, протяженности во времени, соответствующей второму временному окну, и конкретной протяженности во времени, соответствующей конкретному окну, может обеспечить исключение протяженности кратчайшего пичкового сигнала (например, 40 миллисекунд), и тем самым можно обеспечить высокое отношение сигнал/шум. С другой стороны, объем вычислений в системе может быть относительно мал, объем повторных вычислений в системе может быть уменьшен, и может быть уменьшена сложность во времени, так что компьютерная эффективность и точность вычислений в системе могут быть улучшены.
Когда конкретное окно содержит одно временное окно, это конкретное окно может содержать первое временное окно или второе временное окно. Просто в качестве примера, когда конкретное окно содержит одно временное окно, это конкретное окно может содержать второе временное окно.
В ходе операции 6424, аномальный сигнал может быть определен на основе информации о характеристиках, соответствующей EMG-сигналу по меньшей мере в одном временном окне.
В некоторых вариантах, указанная информация о характеристиках может содержать амплитудную информацию или статистическую информацию относительно амплитудной информации, либо какую-либо комбинацию их. В некоторых вариантах, амплитудная информация может представлять собой среднюю амплитуду или квадрат средней амплитуды EMG-сигнала, соответствующего каждому временному окну из указанной совокупности по меньшей мере из одного временного окна. В некоторых вариантах, статистическая информация относительно амплитудной информации может содержать энтропию, дисперсию, среднеквадратическое отклонение, стандартное отклонение среднеквадратического отклонения, частоту переходов через нуль амплитудной информации, или какую-либо комбинацию этих параметров. Энтропию можно рассматривать как меру неупорядоченности системы. Дисперсию, среднеквадратическое отклонение и стандартное отклонение среднеквадратического отклонения можно конфигурировать для оценки степени рассеяния данных. Частоту переходов через нуль можно рассматривать как частоту изменений знака, таких как изменений сигнала от положительного значения к отрицательному значению или наоборот.
В некоторых вариантах, нормальный EMG-сигнал может, в общем случае, представлять собой сигнал, обладающий кратковременной стабильностью, иными словами, среднее значение и дисперсия амплитуды такого EMG-сигнала в течение некоторого периода времени могут быть стабильными и иметь небольшие флуктуации. Аномальный сигнал, такой как скачкообразный сигнал, пропуск сигнала, сигнал насыщения и т.п., может быть нестабильным сигналом. Поэтому амплитудная информация нормального EMG-сигнала и статистическая информация относительно амплитудной информации могут явно отличаться от амплитудной информации аномального сигнала и статистической информации относительно амплитудной информации. Способ 6000 обработки данных движения может содержать идентификацию аномального сигнала на основе информации о характеристиках, соответствующей EMG-сигналу. В некоторых вариантах, модуль 220 обработки может получить амплитудную информацию или статистическую информацию относительно амплитудной информации, соответствующей EMG-сигналу, в разных временных окнах (например, в первом временном окне и/или во втором временном окне) для определения позиции аномального сигнала. Подробное описание относительно определения позиции аномального сигнала на основе информации о характеристиках, соответствующей EMG-сигналу, в разных временных окнах может быть иллюстрировано следующим образом.
Для удобства рассмотрения, последующее описание может быть иллюстрировано в предположении, что информация о характеристиках является амплитудной информацией в качестве примера. Специалисты в рассматриваемой области должны понимать, что эта амплитудная информация, включая статистическую информацию относительно амплитудной информации, также находится в пределах объема настоящего изобретения. Когда информация о характеристиках содержит статистическую информацию относительно амплитудной информации, способ идентификации такой информации может быть таким же, как способ идентификации, в котором информация о характеристиках является амплитудной информацией, так что это описание можно в настоящей заявке не повторять.
Как отмечено выше, в некоторых вариантах, аномальный сигнал может представлять собой скачкообразный сигнал. На фиг. 8 представлена упрощенная диаграмма, иллюстрирующая пример скачкообразного сигнала согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 8, поз. 001 представляет скачкообразный сигнал. Как отмечено выше, скачкообразный сигнал из EMG-сигнала 001 может быть описан точкой сингулярности. Примерами точек сингулярности могут быть пичковый сигнал, разрыв сигнала или другой подобный сигнал. Для удобства рассмотрения, последующее описание может быть иллюстрировано в предположении, что точка сингулярности представляет собой пичковый сигнал в качестве примера. Эта точка сингулярности может представлять собой нарушение непрерывности сигнала, вызванное резким изменением амплитуды EMG-сигнала в некоторый момент времени. В качестве другого примера, EMG-сигнал может иметь относительно гладкую форму, а амплитуда этого EMG-сигнал может не иметь резких изменений, но может резко изменяться первая производная EMG-сигнала, так что эта первая производная может иметь разрыв.
Когда скачкообразный сигнал идентифицирован, описание можно иллюстрировать в предположении, что указанная совокупность по меньшей мере из одного временного окна содержит несколько временных окон в качестве примера. Для удобства рассмотрения это описание можно иллюстрировать в предположении, что указанная совокупность из нескольких окон содержит первое временное окно и второе временное окно, а информация о характеристиках является амплитудной информацией в качестве примера. Специалисты в рассматриваемой области должны понимать, что совокупность нескольких временных окон может содержать больше двух окон, что также будет попадать в объем настоящего изобретения.
На фиг. 9 представлена логическая схема, иллюстрирующая пример процедуры идентификации скачкообразного сигнала согласно некоторым вариантам настоящего изобретения. На фиг. 9 показана операция 6424. Как показано на фиг. 9, эта операция 6424 может содержать следующие операции.
В ходе операции 6424-1, может быть определена информация о характеристиках, соответствующая EMG-сигналу в нескольких временных окнах.
В ходе операции 6424-1, может быть определена информация о характеристиках, соответствующая EMG-сигналу в каждом временном окне из совокупности нескольких временных окон. Эти несколько временных окон могут соответствовать нескольким сегментам информации о характеристиках, причем это соответствие между временными окнами и сегментами информации о характеристиках может соответствием типа одно окно к одному сегменту. Это описание можно иллюстрировать в предположении, что указанная совокупность из нескольких окон содержит первое временное окно и второе временное окно, а информация о характеристиках является амплитудной информацией в качестве примера. В ходе операции 6424-1, могут быть определены первая амплитудная информация, соответствующая EMG-сигналу в первом окне, и вторая амплитудная информация, соответствующая EMG-сигналу во втором окне. В некоторых вариантах, модуль 220 обработки может выбрать протяженность во времени первого временного окна и протяженность во времени второго временного окна и выделить первую амплитудную информацию, соответствующую EMG-сигналу в пределах протяженности во времени первого временного окна, и вторую амплитудную информацию, соответствующую EMG-сигналу в пределах протяженности во времени второго временного окна. В некоторых вариантах, первая амплитудная информация может содержать среднюю амплитуду EMG-сигнала в первом временном окне или квадрат средней амплитуды EMG-сигнала в первом временном окне. Вторая амплитудная информация может содержать среднюю амплитуду EMG-сигнала во втором временном окне или квадрат средней амплитуды EMG-сигнала во втором временном окне. Например, модуль 220 обработки может выбрать протяженность во времени первого временного окна равную 80 миллисекунд и выделить первую амплитудную информацию, соответствующую EMG-сигналу в этом первом временном окне. Модуль 220 обработки может выбрать протяженность во времени второго временного окна равную 20 миллисекунд и выделить вторую амплитудную информацию, соответствующую EMG-сигналу в этом втором временном окне.
В некоторых вариантах, выбор протяженности во времени первого временного окна и протяженности во времени второго временного окна может быть связан с длительностью кратчайшего пичкового сигнала и объемом вычислений в системе. В некоторых вариантах, протяженность во времени первого временного окна и протяженность во времени второго временного окна могут быть выбраны на основе характеристик пичкового сигнала. Протяженность во времени пичкового сигнала в составе ЭКГ (ECG) может составлять 40 – 100 миллисекунд. Промежуток времени между двумя пичковыми сигналами в ЭКГ (ECG) может быть около 1 с. Две стороны относительно пиковой точки пичкового сигнала могут быть в основном симметричны. Распределение амплитуды на двух сторонах пичкового сигнала может быть относительно средним. В некоторых вариантах, когда пичковый сигнал является сигналом ЭКГ (ECG), может быть выбрана протяженность во времени меньше длительности пичкового сигнала. Например, в качестве протяженности во времени второго временного окна может быть выбрана половина длительности пичкового сигнала. Протяженность во времени первого временного окна может быть больше протяженности во времени второго временного окна, например, в 4 раза больше протяженности во времени второго временного окна. В некоторых вариантах, от протяженности во времени первого временного окна может требоваться только, чтобы она находилась в пределах разности между интервалом между пичковыми сигналами (около 1 с) и протяженностью во времени второго временного окна. Следует также отметить, что протяженность во времени первого временного окна и протяженность во времени второго временного окна могут не ограничиваться приведенными выше соображениями. До тех пор, пока сумма протяженности во времени второго временного окна и протяженности во времени первого временного окна меньше величины промежутка времени между двумя соседними пичковыми сигналами, протяженность во времени второго временного окна меньше длительности одного пичкового сигнала или амплитуда EMG-сигнала во втором временном окне и амплитуда EMG-сигнала в первом временном окне могут эффективно различаться.
В ходе операции 6424-2, может быть определено, что отношение информации о характеристиках, соответствующей временному окну, следующему за неким временным интервалом, к информации о характеристиках, соответствующей временному окну, предшествующему этому временному интервалу, превосходит заданное первое пороговое значение, и EMG-сигнал во временном окне, следующем за указанным временным интервалом, может быть обозначен как скачкообразный сигнал.
Как отмечено выше, временной интервал, соответствующий первому временному окну, может предшествовать временному интервалу, соответствующему второму временному окну. Иными словами, временное окно, предшествующее этому временному интервалу может быть первым временным окном. Временное окно, следующее за указанным временным интервалом, может представлять собой второе временное окно. Процедура определения отношения информации о характеристиках, соответствующей временному окну, следующему за рассматриваемым временным интервалом, к информации о характеристиках, соответствующей временному окну, предшествующему указанному временному интервалу, может содержать определение отношения информации о характеристиках, соответствующей EMG-сигналу во втором временном окне, к информации о характеристиках, соответствующей EMG-сигналу в первом временном окне, иными словами, отношения второй амплитудной информации, соответствующей EMG-сигналу во втором временном окне, к первой амплитудной информации, соответствующей EMG-сигналу в первом временном окне.
В некоторых вариантах, модуль 220 обработки может определить, превосходит ли отношение второй амплитудной информации, соответствующей EMG-сигналу во втором временном окне, к первой амплитудной информации, соответствующей EMG-сигналу в первом временном окне, первое пороговое значение. Первое пороговое значение может храниться в запоминающем устройстве или на диске в носимом устройстве 130, либо может быть также храниться в устройстве 110 обработки, или отрегулировано на основе фактической ситуации. В некоторых вариантах, модуль 220 обработки может осуществлять корректирующую обработку EMG-сигнала во втором временном окне на основе результата определения соотношения между отношением второй амплитудной информации к первой амплитудной информации и первым пороговым значением в ходе операции 6424-2. В некоторых вариантах, если модуль 220 обработки определит, что отношение второй амплитудной информации к первой амплитудной информации превышает первое пороговое значение, операция 6424-2 может содержать определение, что EMG-сигнал во втором временном окне представляет собой скачкообразный сигнал, и обрабатывать этот EMG-сигнал во втором временном окне следует посредством операции 6600 для коррекции этого скачкообразного сигнала. В некоторых вариантах, процедура обработки EMG-сигнала во втором временном окне может содержать осуществление корректирующей обработки EMG-сигнала во втором временном окне на основе EMG-сигнала в конкретном временном интервале, предшествующем второму временному окну или следующим за этим окном. Более подробное описание операции 6600 может быть рассмотрено в дальнейшем.
В других вариантах, если модулем 220 обработки определено, что отношение второй амплитудной информации к первой амплитудной информации, не больше первого порогового значения, этот модуль 220 обработки может сохранить EMG-сигнал во втором временном окне. В некоторых вариантах, модуль 220 обработки может сохранять EMG-сигнал во втором окне на основе результата определения соотношения между отношением второй амплитудной информации к первой амплитудной информации и первого порогового значения. Например, в некоторых вариантах, отношение второй амплитудной информации к первой амплитудной информации может быть не больше первого порогового значения, тогда EMG-сигнал во втором окне, соответствующий второй амплитудной информации, может не быть скачкообразным сигналом, и этот EMG-сигнал может быть сохранен, иными словами, может быть сохранен EMG-сигнал во втором окне.
Следует отметить, что в процессе мускульного напряжения пользователя может происходить постепенное накопление заряда, так что амплитуда EMG-сигнала может постепенно возрастать, так что в отсутствие пичкового сигнала амплитуда EMG-сигнала в двух соседних временных окнах (например, в первом временном окне и во втором временном окне) может не испытывать резких изменений. В некоторых вариантах, пичковый сигнал может быть обработан в реальном времени путем определения и устранения пичкового сигнала из EMG-сигнала на основе операции 6424, так что носимое устройство 130 или устройство 140 мобильного терминала может передавать по обратной связи пользователю состояние движения в реальном времени, тем самым помогая пользователю выполнять упражнения более обоснованным способом с научной точки зрения.
В некоторых вариантах, способ определения точки сингулярности в EMG-сигнале может содержать, не ограничиваясь этим, преобразование Фурье, вейвлетное преобразование, фрактальные измерения или другое подобное преобразование, либо какую-то комбинацию перечисленных преобразований, что может быть не описано повторно в настоящем изобретении.
Как отмечено выше, в некоторых вариантах, аномальный сигнал может представлять собой пропуск сигнала. На фиг. 10 представлена упрощенная диаграмма, иллюстрирующая пример пропуска сигнала согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 10, поз. 002 обозначает пропуск сигнала. Как отмечено выше, пропуск в EMG-сигнале может быть образован в результате потери сигнала, вызванной полным отсоединением положительного электрода и отрицательного электрода датчика EMG. Амплитуда сигнала на отрезке пропуска может быть в основном равна 0 или быть близкой к 0.
Когда идентифицирован пропуск сигнала, соответствующее описание может быть иллюстрировано с использованием совокупности по меньшей мере из одного временного окна, содержащей одно временное окно, в качестве примера. Для удобства рассмотрения описание может быть иллюстрировано с использованием того, что указанное по меньшей мере одно временное окно представляет собой второе временное окно, и того, что информация о характеристиках является амплитудной информацией, в качестве примера. Специалисты в рассматриваемой области должны понимать, что совокупность по меньшей мере из одного временного окна может содержать больше одного временного окна, что также попадает в пределы объема настоящего изобретения.
На фиг. 11 представлена логическая схема, иллюстрирующая пример процедуры для идентификации пропуска сигнала согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 11, операция 6424 может содержать следующие операции.
В ходе операции 6424-3, может быть определена информация о характеристиках, соответствующая EMG-сигналу по меньшей мере в одном временном окне.
В ходе операции 6424-3, может быть определена информация о характеристиках, соответствующая EMG-сигналу в каждом временном окне из совокупности по меньшей мере из одного временного окна. По меньшей мере одно временное окно может соответствовать по меньшей мере одному сегменту информации о характеристиках, и такое по меньшей мере одно временное окно может соответствовать по меньшей мере одному сегменту информации о характеристиках в соотношении один к одному (один сегмент информации для одного временного окна). Это описание может быть иллюстрировано с использованием совокупности по меньшей мере из одного временного окна, содержащей второе временное окно, и информации о характеристиках, являющейся амплитудной информации, в качестве примера. Эта операция может быть в основном такой же, как операция 6424-1, так что описание здесь может не быть повторено.
В некоторых вариантах, выбор протяженности во времени второго временного окна может быть связан с длительностью кратчайшего пропуска сигнала и объема вычислений в системе. В некоторых вариантах, протяженность во времени второго временного окна может быть выбрана на основе влияния пропуска сигнала на выборку данных с гладкой кривой. Например, протяженность во времени второго временного окна может быть меньше продолжительности периода времени выборки данных. Например, половина периода времени выборки данных может быть равна протяженности во времени второго временного окна. Следует также отметить, что выбор протяженности во времени второго временного окна не ограничивается приведенным выше описанием, до тех пор, пока протяженность во времени второго временного окна остается меньше длительности периода времени выборки данных. Более подробно процедура выборки данных может быть рассмотрена в последующем описании.
В ходе операции 6424-4, EMG-сигнал во временном окне, соответствующем информации о характеристиках, представляющей по меньшей мере один сегмент информации о характеристиках и являющейся ниже предварительно сохраненного заданного второго порогового значения для информации о характеристиках, может быть обозначен как пропуск сигнала.
Как отмечено выше, амплитуда пропуска может быть в основном равна 0 или близка к 0. Поэтому амплитудная информация для пропуска сигнала может быть в основном ниже второго порогового значения. Второе пороговое значение может храниться в запоминающем устройстве или на диске в носимом устройстве 130, или может также храниться в устройстве 110 обработки, или отрегулировано на основе фактической ситуации. Второе пороговое значение может быть вычислено и сохранено заранее до выполнения операции 6424-4. В некоторых вариантах осуществления второе пороговое значение может представлять собой уровень фоновых шумов в системе. Этот уровень фоновых шумов в системе может быть вычислен на основе статичного EMG-сигнала, собранного, когда пользователь отдыхает, или когда носимое устройство 130 не используется. В некоторых вариантах осуществления второе пороговое значение может также представлять собой минимальное статистическое значение на основе архивного EMG-сигнала, например, минимальное значение нормального EMG-сигнала, собранного датчиком EMG в некий предыдущий момент времени. В частности, операция 6424-4 может содержать определение соотношения между информацией о характеристиках, соответствующей EMG-сигналу, по меньшей мере в одном сегменте этой информации о характеристиках (например, для второго временного окна) и вторым пороговым значением. В некоторых вариантах, если модуль 220 обработки определит, что вторая амплитудная информация меньше второго порогового значения, тогда операция 6424-4 может содержать определение, что EMG-сигнал во втором временном окне представляет собой пропуск сигнала, и следует обработать EMG-сигнал во втором временном окне в ходе операции 6600 для коррекции пропуска сигнала. В некоторых вариантах, обработка EMG-сигнала во втором временном окне может содержать осуществление корректирующей обработки EMG-сигнала во втором временном окне на основе EMG-сигнала в пределах конкретного временного интервала, предшествующего или следующего за вторым временным окном. Более подробно операция 6600 может быть рассмотрена в последующем описании.
В других вариантах, если модуль 220 обработки определит, что информация о характеристиках превышает второе пороговое значение, может не быть пропуска сигнала по меньшей мере в одном временном окне. Например, если модуль 220 обработки определит, что амплитудная информация превышает или равна второму пороговому значению, модуль 220 обработки может сохранить EMG-сигнал во втором окне. В некоторых вариантах, модуль 220 обработки может сохранить EMG-сигнал во втором окне на основе результата определения соотношения между второй амплитудной информацией и вторым пороговым значением. Например, в некоторых вариантах, если вторая амплитудная информация превышает или равна второму пороговому значению, EMG-сигнал во втором временном окне, соответствующем второй амплитудной информации, может не быть пропуском сигнала, и этот EMG-сигнал может быть сохранен, иными словами, может быть сохранен EMG-сигнал во втором временном окне.
Как отмечено выше, в некоторых вариантах, аномальный сигнал может представлять собой сигнал насыщения. На фиг. 12 представлена упрощенная диаграмма, иллюстрирующая пример сигнала насыщения согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 12, поз. 003 обозначает сигнал насыщения. Как отмечено выше, сигнал насыщения в EMG-сигнале может быть образован в результате насыщения, вызванного частичным отсоединением положительного электрода и отрицательного электрода датчика EMG. Амплитуда сигнала насыщения может быть выше амплитуды нормального EMG-сигнала.
Когда идентифицирован сигнал насыщения, описание может быть иллюстрировано с использованием совокупности по меньшей мере из одного временного окна, содержащей одно временное окно, в качестве примера. Для удобства рассмотрения описание может быть иллюстрировано с использованием того, что указанное по меньшей мере одно временное окно представляет собой второе временное окно, а информация о характеристиках является амплитудной информацией, в качестве примера. Специалисты в рассматриваемой области должны понимать, что совокупность по меньшей мере из одного временного окна может содержать больше одного временного окна, что также попадает в пределы объема настоящего изобретения.
На фиг. 13 представлена логическая схема, иллюстрирующая пример процедуры идентификации сигнала насыщения согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 13, операция 6424 может содержать следующие операции.
В ходе операции 6424-5, может быть определена информация о характеристиках, соответствующая EMG-сигналу по меньшей мере в одном временном окне.
В ходе операции 6424-5, может быть определена информация о характеристиках, соответствующая EMG-сигналу в каждом временном окне из совокупности по меньшей мере из одного временного окна. По меньшей мере одно временное окно может соответствовать по меньшей мере одному сегменту информации о характеристиках, и такое по меньшей мере одно временное окно может соответствовать по меньшей мере одному сегменту информации о характеристиках в соотношении один к одному (один сегмент информации для одного временного окна). Это описание может быть иллюстрировано с использованием совокупности по меньшей мере из одного временного окна, содержащей второе временное окно, и информации о характеристиках, являющейся амплитудной информацией, в качестве примера. Эта операция может быть в основном такой же, как операция 6424-1, что здесь может не быть повторено.
В некоторых вариантах, выбор протяженности во времени второго временного окна может быть связан с длительностью кратчайшего сигнала насыщения и с объемом вычислений в системе. В некоторых вариантах, протяженность во времени второго временного окна может быть выбрана на основе влияния сигнала насыщения на выборку данных с гладкой кривой. Например, протяженность во времени второго временного окна может быть меньше длительности периода времени выборки данных. Например, половина длительности периода времени выборки данных может быть равна протяженности во времени второго временного окна. Следует также отметить, что выбор протяженности во времени второго временного окна не ограничивается приведенным выше описанием до тех пор, пока протяженность во времени второго временного окна меньше длительности периода времени выборки данных. Более подробное описание выборки данных может быть приведено далее.
В ходе операции 6424-6, EMG-сигнал во временном окне, соответствующем информации о характеристиках, иными словами, по меньшей мере одному сегменту информации о характеристиках, который превышает предварительно сохраненную информацию о характеристиках насыщения, может быть обозначен как сигнал насыщения.
Как отмечено выше, амплитуда сигнала насыщения может быть намного выше амплитуды нормального EMG-сигнала. В некоторых вариантах, модуль 220 обработки может определить, превосходит ли информация о характеристиках информацию о характеристиках насыщения. Эта информация о характеристиках насыщения может быть сохранена в запоминающем устройстве или на диске в носимом устройстве 130, или может быть также сохранена в устройстве 110 обработки, или может регулироваться на основе фактической ситуации. Информация о характеристиках насыщения может быть определена и сохранена заранее прежде операции 6424-6. Информация о характеристиках насыщения может быть определена на основе EMG-сигнала насыщения, собранного, когда положительный электрод и отрицательный электрод EMG-датчика частично отсоединены. В частности, операция 6424-6 может быть определена соотношением между информацией о характеристиках, соответствующей EMG-сигналу, по меньшей мере в одном сегменте информации о характеристиках (например, втором временном окне) и информацией о характеристиках насыщения. В некоторых вариантах, если модуль 220 обработки определяет, что вторая амплитудная информация превышает информацию о характеристиках насыщения, операция 6424-6 может содержать определение, что EMG-сигнал во втором временном окне представляет собой сигнал насыщения, и обработку EMG-сигнала во втором временном окне посредством операции 6600 для коррекции сигнала насыщения. В некоторых вариантах, процедура обработки EMG-сигнала во втором временном окне может содержать осуществление коррекционной обработки EMG-сигнала во втором временном окне на основе EMG-сигнала в пределах конкретного временного интервала, предшествующего второму временному окну или следующего за этим окном. Более подробно описание в отношении операции 6600 может быть приведено далее.
В других вариантах, если модуль 220 обработки определяет, что информация о характеристиках меньше информации о характеристиках насыщения, может быть определено, что в указанном по меньшей мере одном временном окне нет сигнала насыщения. Например, если модуль 220 обработки определит, что вторая амплитудная информация не больше информации о характеристиках насыщения, модуль 220 обработки может сохранить EMG-сигнал во втором окне. В некоторых вариантах, модуль 220 обработки может сохранить EMG-сигнал во втором окне на основе результата определения соотношения между второй амплитудной информацией и информацией о характеристиках насыщения. Например, в некоторых вариантах, если вторая амплитудная информация не больше информации о характеристиках насыщения, EMG-сигнал во втором временном окне, соответствующий этой второй амплитудной информации, может не быть сигналом насыщения, и этот EMG-сигнал может быть сохранен, иными словами, может быть сохранен EMG-сигнал во втором временном окне.
Как отмечено выше, в некоторых вариантах, аномальный сигнал может представлять собой колебательный сигнал, появившийся в результате действия алгоритма фильтрации верхних частот. На фиг. 14 представлена упрощенная диаграмма, иллюстрирующая пример колебательного сигнала согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 14, поз. 004 представляет колебательный сигнал.
На фиг. 15 представлена логическая схема, иллюстрирующая пример процедуры идентификации колебательного сигнала согласно некоторым вариантам настоящего изобретения. На фиг. 15 может быть показана операция 6420. Как показано на фиг. 15, операция 6420 может содержать следующие операции.
В ходе операции 6426, референсная амплитуда колебаний и референсная продолжительность колебательного сигнала могут быть определены на основе параметра фильтра, используемого алгоритмом фильтрации верхних частот.
Как отмечено выше, чем ниже частота среза, используемая фильтром верхних частот, тем меньше амплитуда колебаний, присущая колебательному сигналу, создаваемому этим фильтром нижних частот, и тем меньше может быть продолжительность этого колебательного сигнала. В отличие от этого, чем выше частота среза, используемая фильтром верхних частот, тем больше амплитуда колебаний, присущая колебательному сигналу, создаваемому этим фильтром нижних частот, и тем больше может быть продолжительность этого колебательного сигнала. Модуль 220 обработки может определить референсную амплитуду колебаний и референсную продолжительность колебательного сигнала на основе частоты среза фильтра верхних частот. Указанный параметр фильтра может представлять собой частоту среза.
В ходе операции 6428, EMG-сигнал может быть согласован с референсной амплитудой колебаний и референсной продолжительностью в реальном времени. Такой EMG-сигнал, соответствующий сигнальному интервалу, в пределах которого этот EMG-сигнал согласован с референсной амплитудой колебаний и референсной продолжительностью, может быть обозначен как колебательный сигнал.
Модуль 220 обработки может согласовать EMG-сигнал с референсной амплитудой колебаний и референсной продолжительностью, соответствующими этому EMG-сигналу, для поиска колебательного сигнала в этом EMG-сигнале. В некоторых вариантах, если модуль 220 обработки определит, что в EMG-сигнале имеется сигнальный интервал, где сигнал согласован с референсной амплитудой колебаний и референсной продолжительностью, этот модуль 220 обработки может определить, что EMG-сигнал, соответствующий согласованному сигнальному интервалу, представляет собой колебательный сигнал, и обрабатывает такой колебательный сигнал на основе операции 6600 для коррекции этого колебательного сигнала. В некоторых вариантах, процедура обработки колебательного сигнала может содержать корректирующую обработку этого колебательного сигнала на основе EMG-сигнала в пределах конкретного временного интервала, предшествующего колебательному сигналу или следующего за ним. Более подробное описание операции 6600 может быть приведено далее.
В других вариантах, если модуль 220 обработки определит, что в EMG-сигнале имеется сигнальный интервала, не согласованный с референсной амплитудой колебаний и референсной продолжительностью, модуль 220 обработки может определить, что EMG-сигнал, соответствующий несогласованному сигнальному интервалу, не является колебательным сигналом, так что модуль обработки может сохранить EMG-сигнал в несогласованном сигнальном интервале.
Как отмечено выше, операция 6400 может также содержать операцию 6440. В ходе операции 6440, EMG-сигнал в частотной области может быть обработан для определения аномального сигнала. В некоторых вариантах, процедура обработки EMG-сигнала в частотной области может содержать фильтрацию этого EMG-сигнала в частотной области для выбора или сохранения составляющей в конкретном частотном диапазоне из EMG-сигнала в частотной области. В некоторых вариантах, частотный диапазон EMG-сигнала, полученного модулем 210 сбора данных, может составлять 1 Гц – 1000 Гц, что можно фильтровать и выбрать EMG-сигнал в конкретном частотном диапазоне (например, 30 Гц – 150 Гц) для последующей обработки. В некоторых вариантах, этот конкретный частотный диапазон может составлять 10 Гц – 500 Гц. Предпочтительно, указанный конкретный частотный диапазон может составлять 15 Гц – 300 Гц. Более предпочтительно, этот конкретный частотный диапазон может составлять 30 Гц – 150 Гц. В некоторых вариантах, фильтрация может представлять собой фильтрацию нижних частот. В некоторых вариантах, фильтр нижних частот может содержать пассивный фильтр из индуктивностей и емкостей (LC-фильтр), пассивный фильтр из резисторов и емкостей (RC-фильтр), активный RC-фильтр или пассивный фильтр на основе специального компонента. В некоторых вариантах, пассивный фильтр на основе специального компонента может представлять собой пьезокерамический фильтр, кварцевый фильтр, фильтр на поверхностной акустической волне (ПАВ-фильтр) или какую-либо комбинацию таких фильтров. Следует отметить, что указанный конкретный частотный диапазон не ограничивается указанным выше диапазоном, и что могут также быть другие диапазоны, которые можно выбирать на основе фактической ситуации.
На фиг. 16 представлена логическая схема, иллюстрирующая пример процедуры обработки EMG-сигнала в частотной области согласно некоторым вариантам настоящего изобретения. Указанная операция 6440 показана на фиг. 16. Как показано на фиг. 16, операция 6440 может содержать следующие операции.
В ходе операции 6442, EMG-сигнал в частотной области может быть получен в реальном времени на основе алгоритма преобразования в частотную область.
Модуль 220 обработки может осуществлять преобразование в частотную область применительно к EMG-сигналу во временной области в реальном времени для получения EMG-сигнала в частотной области. Алгоритм преобразования в частотную область может использовать преобразование Фурье, вейвлетное преобразование, преобразование Лапласа, Z-преобразование или другое подобное преобразование. Когда модуль 220 обработки выполняет операцию 6442, преобразование в частотную область может осуществляться с использованием каждого кадра EMG-сигнала в качестве базовой единицы преобразования. Модуль 220 обработки может осуществлять преобразование EMG-сигнала в частотную область кадр за кадром.
В ходе операции 6444, может быть в реальном времени определена спектральная характеристика сигнала частотной области.
В некоторых вариантах, спектральная характеристика может представлять собой форму спектра, спектральную плотность мощности, частоту средней мощности, медианную частоту, масштаб вейвлетов или какую-либо комбинацию таких характеристик. В некоторых вариантах, частотное распределение нормального EMG-сигнала может быть сконцентрировано главным в диапазоне частот 20-400 Гц. Область распределения энергии нормального EMG-сигнала может находиться главным образом в диапазоне частот 50-200 Гц. Функция статистического среднего для нормального EMG-сигнала может иметь, в общем, форму типа кривой Гаусса с одним пиком. Однако форма спектрального распределения скачкообразного сигнала, такого как пичковый сигнал, может быть в основном асимметричной, что может значительно отличаться от формы типа кривой Гаусса для нормального EMG-сигнала. Частота шумового сигнала, вызванного артефактом движения, может быть обычно ниже 20 Гц. Однако частота сигнала частоты питания (иными словами, сигнала насыщения), собранного при отсоединении части электродов датчика EMG может быть в основном распределена около 50 Гц, а частотный спектр сигнала насыщения может более плоским, чем спектр нормального EMG-сигнала. Частотная характеристика нормального EMG-сигнала может явно отличаться от частотной характеристики аномального сигнала. Способ 6000 обработки данных движения может содержать идентификацию аномального сигнала из нормальных EMG-сигналов на основе спектральных характеристик EMG-сигнала в частотной области. Когда модуль 220 обработки выполняет операцию 6444, частотная характеристика EMG-сигнала в частотной области для каждого кадра может быть определена последовательно кадр за кадром.
В ходе операции 6446, EMG-сигнал, соответствующий сигналу частотной области, спектральная характеристика которого не удовлетворяет заданному условию, может быть определен как аномальный сигнал.
Когда модуль 220 обработки выполняет операцию 6446, спектральная характеристика сигнала частотной области для каждого кадра EMG-сигнала может быть определена кадр за кадром на основе заданного условия. В некоторых вариантах, модуль 220 обработки может определить, удовлетворяет ли спектральная характеристика сигнала частотной области, соответствующего EMG-сигналу для текущего кадра, заданному условию. Спектральная характеристика нормального EMG-сигнала должна удовлетворять этому заданному условию. Спектральная характеристика аномального сигнала может не удовлетворять этому заданному условию. Указанное заданное условие может представлять собой условие, полученное на основе статистических свойств спектральной характеристики нормального EMG-сигнала. Это заданное условие может быть сохранено в запоминающем устройстве или на диске в носимом устройстве 130, или может также быть сохранено в устройстве 110 обработки, либо может регулироваться на основе фактической ситуации. В некоторых вариантах, модуль 220 обработки может идентифицировать аномальный сигнал из нормального EMG-сигнала на основе результата определения, в ходе операции 6446, удовлетворяет ли спектральная характеристика сигнала частотной области заданному условию, и осуществить корректирующую обработку аномального сигнала. В некоторых вариантах, если модуль 220 обработки определит, что спектральная характеристика сигнала частотной области, соответствующего EMG-сигналу текущего кадра, не удовлетворяет заданному условию, тогда EMG-сигнал текущего кадра, который не удовлетворяет заданному условию, может быть определен как аномальный сигнал, и такой аномальный сигнал может быть обработан в ходе операции 6600 для коррекции этого аномального сигнала. В некоторых вариантах, процедура обработки аномального сигнала может содержать осуществление корректирующей обработки аномального сигнала на основе EMG-сигнала в пределах конкретного временного интервала, предшествующего этому аномальному сигналу или следующего за ним. Более подробное описание операции 6600 будет приведено далее.
В других вариантах, если модуль 220 обработки определит, что спектральная характеристика сигнала частотной области, соответствующего EMG-сигналу текущего кадра, удовлетворяет заданному условию, этот EMG-сигнал текущего кадра может не быть аномальным сигналом, этот EMG-сигнал может быть сохранен, и модуль 220 обработки может сохранить такой EMG-сигнал текущего кадра.
Как показано на фиг. 6, способ 6000 может также содержать следующие операции.
В ходе операции 6600, аномальный сигнал может быть скорректирован.
В некоторых вариантах, способ 6000 может также содержать осуществление корректирующей обработки аномального сигнала в реальном времени. Корректирующая обработка сигнала может означать коррекцию аномального сигнала (например, скачкообразного сигнала, пропуска сигнала, сигнала насыщения, колебательного сигнала и т.п.) в EMG-сигнале. Как отмечено выше, в ходе операции 6400, модуль 220 обработки может осуществить идентификацию аномального сигнала в реальном времени. В ходе операции 6600, коррекция аномального сигнала посредством модуля 220 обработки также может быть осуществлена в реальном времени. Иными словами, модуль 220 обработки может идентифицировать в реальном времени аномальный сигнал и скорректировать этот аномальный сигнал в реальном времени.
На фиг. 17 представлена логическая схема, иллюстрирующая пример процедуры коррекции аномального сигнала согласно некоторым вариантам настоящего изобретения. На фиг. 17 представлена операция 6600. Как показано на фиг. 17, операция 6600 может содержать следующие операции.
В ходе операции 6620, может быть осуществлена операция выборки данных в реальном времени из EMG-сигнала прежде аномального сигнала для получения выборочных данных.
Как отмечено выше, модуль 220 обработки может идентифицировать в реальном времени аномальный сигнал и скорректировать этот аномальный сигнал в реальном времени. Иными словами, когда модуль 220 обработки идентифицирует новый аномальный сигнал, корректирующая обработка может быть осуществлена применительно к этому аномальному сигналу прежде другого нового аномального сигнала. Другими словами, EMG-сигнал прежде текущего аномального сигнала может быть составлен из нормального EMG-сигнала и аномального сигнала, который уже был скорректирован, иными словами в EMG-сигнале нет аномальных сигналов прежде текущего аномального сигнала. В ходе операции 6620, модуль 220 обработки может завершить выборку данных EMG-сигнала прежде текущего аномального сигнала в реальном времени, чтобы получить выборочные данные, соответствующие EMG-сигналу прежде текущего аномального сигнала.
Операция выборки данных может получить ряд дискретных данных (иными словами, выборочных данных) на основе EMG-сигнала посредством выборки и т.д. Выборочные данные могут представлять собой дискретные данные, полученные после выборки данных. В частности, способ выборки данных содержит получение дискретных данных на основе конкретного периода времени. Этот конкретный период времени может иметь любую протяженность во времени. Например, этот конкретный период времени может иметь протяженность одного кадра, протяженность 0.5 кадров или может быть короче. Например, в одном кадре можно собрать в среднем 10, 20, 30 или даже больше отсчетов дискретных данных. Эти дискретные данные могут представлять собой статистические данные в пределах указанного конкретного периода времени, такие как среднее значение промежуточного значения данных в пределах указанного конкретного периода времени или другие подобные данные.
В ходе операции 6640, прогнозируемые данные, соответствующие моменту времени, когда появляется аномальный сигнал, могут быть определены на основе выборочных данных EMG-сигнала, соответствующих окну временной области.
Модуль 220 обработки может осуществлять подгонку данных на основе выборочных данных для получения аппроксимирующей кривой. В некоторых вариантах, модуль 220 обработки может осуществлять подгонку данных с использованием выборочных данных на основе аппроксимирующей функции подгонки для получения аппроксимирующей кривой. В некоторых вариантах, модуль 220 обработки может также осуществлять подгонку данных с использованием выборочных данных на основе технологии нейронных сетей для получения аппроксимирующей кривой.
В некоторых вариантах, в ходе операции 6640 можно определить, на основе выборочных данных соответствующих указанному окну временной области, аппроксимирующую функцию подгонки; и определить, на основе этой аппроксимирующей функции подгонки, прогнозируемые данные, соответствующие моменту времени, когда появляется аномальный сигнал. Эта аппроксимирующая функция подгонки может представлять собой криволинейную функцию в какой-либо форме. В некоторых вариантах, аппроксимирующая функция подгонки может представлять собой функцию синуса или функцию косинуса. В некоторых вариантах, аппроксимирующая функция подгонки может представлять собой функцию различного порядка, такую как квадратичная функция, кубическая функция, функция четвертого порядка или другая подобная функция. Независимой переменной в аппроксимирующей функции подгонки может быть время, а зависимой переменной может быть амплитуда EMG-сигнала. В ходе операции 6640, модуль 220 обработки может осуществлять подгонку данных на основе выборочных данных для определения аппроксимирующей функции подгонки и прогнозирования амплитуды EMG-сигнала, соответствующей моменту времени, когда появляется аномальный сигнал, на основе аппроксимирующей функции подгонки с целью получения прогнозируемых данных, соответствующих моменту времени, когда появляется аномальный сигнал. Эти прогнозируемые данные могут представлять собой амплитуду EMG-сигнала, соответствующую моменту времени, когда появляется аномальный сигнал.
В некоторых вариантах, операция 6640 может также содержать определение, на основе выборочных данных, соответствующих указанному окну временной области и настраиваемой сети долго-кратковременной памяти (LSTM), прогнозируемых данных, соответствующих моменту времени, когда появляется аномальный сигнал. Сеть LSTM может представлять собой рекуррентную нейронную сеть, способную обучаться долгосрочным зависимостям и делать прогнозы. В некоторых вариантах, модуль 220 обработки может также определять прогнозируемые данные, соответствующие моменту времени, когда появляется аномальный сигнал, на основе других рекуррентных нейронных сетей, таких как сеть управляемых рекуррентных блоков (gated recurrent unit (GRU)) и рекуррентная нейронная сеть (recurrent neural network (RNN)).
В ходе операции 6660, могут быть определены корректировочные данные, соответствующие моменту времени, когда появляется аномальный сигнал, на основе прогнозируемых данных.
На этапе 6660, после получения прогнозируемых данных, модулю 220 обработки может быть необходимо определить, удовлетворяют ли прогнозируемые данные требованиям к использованию, иными словами, определить, представляют ли прогнозируемые данные удовлетворительный EMG-сигнал. Как отмечено выше, нормальный EMG-сигнал может быть в основном относительно стабильным сигналом. Модуль 220 обработки может определить, представляют ли прогнозируемые данные удовлетворительный EMG-сигнал, на основе других EMG-сигналов вокруг этих прогнозируемых данных. В некоторых вариантах, операция 6660 может содержать следующие операции.
В ходе операции 6662, в ответ на определение, что прогнозируемые данные находятся в пределах заданного диапазона, эти прогнозируемые данные могут быть обозначены как корректировочные данные, или
В ходе операции 6664, в ответ на определение, что прогнозируемые данные не находятся в пределах заданного диапазона, в качестве корректировочных данных могут быть обозначены выборочные данные, соответствующие EMG-сигналу по меньшей мере одного кадра, соседнего с аномальным сигналом.
Заданный диапазон может представлять собой диапазон данных, образованный между максимальным значением и минимальным значением EMG-сигнала в рассматриваемом окне временной области. В частности, модуль 220 обработки может получить максимальное значение и минимальное значение EMG-сигнала в окне временной области прежде аномального сигнала, и определить, находятся ли прогнозируемые данные между максимальным значением и минимальным значением. Как отмечено выше, способ 6000 обработки данных движения может идентифицировать аномальный сигнал в реальном времени и корректировать этот аномальный сигнал в реальном времени. Поэтому EMG-сигнал прежде аномального сигнала может представлять собой совокупность нормального EMG-сигнала и скорректированного аномального сигнала. Иными словами, может не быть аномального сигнала в EMG-сигнале прежде рассматриваемого аномального сигнала. Поэтому EMG-сигнал прежде аномального сигнала может быть нормальным и удовлетворительным EMG-сигналом. Модуль 220 обработки может определить, являются ли прогнозируемые данные удовлетворительными, посредством определения, находятся ли прогнозируемые данные в диапазоне данных между максимальным значением и минимальным значением EMG-сигнала в окне временной области прежде этого EMG-сигнала. В некоторых вариантах, когда модуль 220 обработки определит, что прогнозируемые данные находятся в пределах диапазона данных между максимальным значением и минимальным значением EMG-сигнала в окне временной области прежде аномального сигнала, эти прогнозируемые данные могут быть определены в качестве нормального и удовлетворительного EMG-сигнала. В это время, модуль 220 обработки может корректировать аномальный сигнал с использованием прогнозируемых данных в качестве корректировочных данных. В некоторых вариантах, когда модуль 220 обработки определит, что прогнозируемые данные не находится в диапазоне данных, образованном между максимальным значением и минимальным значением EMG-сигнала в окне временной области прежде аномального сигнала, прогнозируемые данные могут быть определены в качестве аномального или неудовлетворительного EMG-сигнала. В это время, модуль 220 обработки может не корректировать аномальный сигнал с использованием прогнозируемых данных в качестве корректировочных данных. В это время, модуль 220 обработки может назначить выборочные данные, соответствующие EMG-сигналу, соседствующему с аномальным сигналом в пределах по меньшей мере одного кадра, в качестве корректировочных данных. Выборочные данные, соответствующие EMG-сигналу, соседствующему с аномальным сигналом в пределах по меньшей мере одного кадра, могут представлять собой статистическое значением для множества выборочных данных, такое как среднее значение, промежуточное значение или какое-либо другое подобное значение.
В ходе операции 6680 аномальный сигнал может быть скорректирован с использованием корректировочных данных.
После определения корректировочных данных модуль 220 обработки может использовать эти корректировочные данные для коррекции аномального сигнала. В частности, модуль 220 обработки может использовать корректировочные данные вместо аномального сигнала.
На фиг. 18 представлена упрощенная диаграмма, иллюстрирующая пример EMG-сигнала и скорректированную гладкую кривую согласно некоторым вариантам настоящего изобретения. Как показано на фиг. 18, поз. 007 обозначает EMG-сигнал, и поз. 008 обозначает гладкую кривую. Способ 6000 обработки данных движения и система 100 контроля движения, предлагаемые в настоящем изобретении, способны обрабатывать EMG-сигнал в частотной области или во временной области с целью идентификации в EMG-сигнале аномального сигнала, такого как скачкообразный сигнал, пропуск сигнала, сигнал насыщения, колебательный сигнал, появившийся в результате работы фильтра верхних частот или другой подобный сигнал. Способ 6000 обработки данных движения и система 100 контроля движения могут также осуществлять выборку данных из EMG-сигнала с использованием алгоритма выборки данных, и прогнозировать данные в момент времени, когда появляется аномальный сигнал, на основе выборочных данных, чтобы получить прогнозируемые данные и использовать эти прогнозируемые данные для замены аномального сигнала, с целью коррекции аномального сигнала. Способ 6000 обработки данных движения и система 100 контроля движения могут не только точно идентифицировать аномальный сигнал, но также корректировать аномальный сигнал, так что скорректированные данные могут быть более согласованы с фактическим движением пользователя, тем самым улучшая восприятие и взаимодействие с пользователем.
В некоторых вариантах, способ 6000 обработки данных движения и система 100 контроля движения могут также напомнить пользователю, что он неправильно носит устройство, в момент, когда будет идентифицирован аномальный сигнал, что делает сбор данных более точным. Например, когда способ 6000 обработки данных движения идентифицирует аномальный сигнал (например, пропуск сигнала и сигнал насыщения), модуль 220 обработки может передать информацию обратной связи модулю 230 управления. Информация обратной связи может сообщить, что пользователь неправильно носит указанное носимое устройство 130 или тянет его во время движения пользователя. Эта информация обратной связи может также содержать подсказку пользователю, что следует скорректировать положение носимого устройства 130, или другую подобную подсказку. Модуль 230 управления может управлять модулем 260 ввода/вывода на основе информации обратной связи и затем управлять устройством 140 мобильного терминала для передачи результата обратной связи относительно движения пользователя. В некоторых вариантах, модуль 230 управления может также управлять одним или несколькими датчиками или другими модулями в модуле 210 сбора данных для передачи обратной связи телу человека. Например, когда в EMG-сигнале, соответствующем некоторому мускулу, во время движения пользователя присутствует аномальный сигнал, модуль 230 управления может управлять электродным модулем в позиции этого мускула с целью электрической стимуляции пользователя, чтобы своевременно подсказать этому пользователю, что нужно скорректировать положение и настройку носимого устройства 130.
В некоторых вариантах, процедура корректирующей обработки аномального сигнала в EMG-сигнале во временной области может также содержать устранение точки сингулярности из EMG-сигнала, например, путем стирания точки сингулярности и сигнала в пределах некоторого периода времени поблизости от точки сингулярности. В качестве альтернативы, процедура корректирующей обработки EMG-сигнала во временной области может содержать коррекцию точки сингулярности в EMG-сигнале на основе информации о характеристиках этого EMG-сигнала в пределах конкретного временного интервала, например, путем регулирования амплитуды точки сингулярности на основе сигнала вокруг точки сингулярности. В некоторых вариантах, информация о характеристиках EMG-сигнала может содержать амплитудную информацию или статистическую информацию относительно амплитудной информации, или какую-либо комбинацию этой информации. Статистическая информация (также называется амплитудной энтропией) относительно амплитудной информации может обозначать распределение амплитудной информации относительно EMG-сигнала во временной области. В некоторых вариантах, после определения положения точки сингулярности (например, соответствующей точки во времени) в EMG-сигнале с использованием алгоритма обработки сигнала (например, преобразования Фурье, вейвлетного преобразования и фрактальной размерности), точку сингулярности можно корректировать на основе EMG-сигнала в пределах конкретного временного интервала прежде или после положения точки сингулярности. Например, когда точка сингулярности представляет собой резкий провал, EMG-сигнал в области этого резкого провала может быть дополнен на основе информации о характеристиках (например, амплитудной информации, статистической информации относительно амплитудной информации) EMG-сигнала в пределах указанного конкретного временного интервала (например, 5 миллисекунд – 60 миллисекунд) прежде или после этого резкого провала.
В некоторых вариантах, корректирующая обработка аномального сигнала в EMG-сигнале может быть произведена другими способами, например, способом типа фильтрации верхних частот, способом типа фильтрации нижних частот, способом типа полосно-пропускающей фильтрации, способом реконструкции с использованием вейвлетного преобразования или другим подобным способом. В некоторых вариантах, для сценариев применения, нечувствительных к низкочастотному сигналу, может быть конфигурирован фильтр верхних частот с частотой среза 100 Гц для устранения пичкового сигнала. В некоторых вариантах, в дополнение к осуществлению корректирующей обработки EMG-сигнала к этому EMG-сигналу могут быть применены и другие виды обработки, такие как фильтрация, усиление сигнала, регулировка фазы или другие подобные способы. В некоторых вариантах, EMG-сигнал пользователя, собранный EMG-датчиком, может быть преобразован в цифровой EMG-сигнал посредством аналого-цифрового преобразователя (АЦП (analog-to-digital converter (ADC))), и преобразованный EMG-сигнал может быть подвергнут фильтрации. Процедура фильтрации может содержать удаление сигнала с частотой питания и гармоник этого сигнала посредством фильтра. В некоторых вариантах, процедура обработки EMG-сигнала может также содержать исключение артефактов движения пользователя. Такое артефакт может представлять собой сигнальный шум, генерируемый движениями мускула относительно EMG-модуля во время движения пользователя в процессе получения EMG-сигнала.
Следует отметить, что приведенное выше описание способа 6000 дано просто для целей иллюстрации и не предназначено для ограничения объема настоящего изобретения. Специалисты в рассматриваемой области могут внести в способ 6000 различные модификации и изменения в соответствии с положениями настоящего изобретения. Например, приведенный выше способ 6000 может представлять собой только пример, в котором скачкообразный сигнал представляет собой пичковый сигнал, когда происходит идентификация и коррекция скачкообразного сигнала. Когда скачкообразный сигнал представляет собой сигнал провала, можно соответствующим способом скорректировать приведенные выше операции и технические решения, либо другие способы могут быть конфигурированы для осуществления корректирующей обработки сигнала. Однако эти модификации и изменения не отклоняются от объема настоящего изобретения.
На основе описанных здесь базовых концепций для специалистов в рассматриваемой области после прочтения этого подробного описания может быть вполне очевидно, что приведенное выше подробное описание представлено исключительно в качестве примера и не является ограничивающим. Хотя здесь это не утверждается в явном виде, специалисты в рассматриваемой области могут внести различные модификации, усовершенствования и изменения в настоящее изобретение. Эти изменения, усовершенствования и модификации предполагаются настоящим изобретением и находятся в пределах смысла и объема примеров вариантов настоящего изобретения.
Более того, для описания вариантов настоящего изобретения была использована определенная терминология. Например, термины «один вариантов» «какой-либо вариант» и/или «некоторые варианты означают, что конкретное свойство, структура или характеристика, описываемые в связи с этим вариантом, включены по меньшей мере в один из вариантов настоящего изобретения. Поэтому подчеркивается и должно быть понятно, что две или более ссылок на «какой-либо вариант», «один вариант» или «альтернативный вариант» в различных частях настоящего описания не обязательно все относятся к одному и тому же варианту. В дополнение к этому, некоторые признаки, структуры или признаки, относящиеся к одному или нескольким вариантам настоящего изобретения можно подходящим образом комбинировать.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И СИСТЕМЫ ИДЕНТИФИКАЦИИ ДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ | 2022 |
|
RU2813471C1 |
| СИСТЕМЫ И СПОСОБЫ ВЫРАБОТКИ АУДИОСИГНАЛА | 2019 |
|
RU2804933C2 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ОКОНЕЧНЫМ УСТРОЙСТВОМ | 2021 |
|
RU2806269C1 |
| СИСТЕМА И СПОСОБ МОНИТОРИНГА ДВИЖЕНИЙ НИЖНИХ КОНЕЧНОСТЕЙ | 2024 |
|
RU2834150C1 |
| СИСТЕМЫ И СПОСОБЫ УСТРАНЕНИЯ ШУМОВ | 2019 |
|
RU2797926C1 |
| СИСТЕМЫ И СПОСОБЫ ШУМОПОДАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИИ СУБПОЛОСНОГО ШУМОПОДАВЛЕНИЯ | 2019 |
|
RU2792614C1 |
| ОТКРЫТОЕ АКУСТИЧЕСКОЕ УСТРОЙСТВО | 2022 |
|
RU2800546C1 |
| НОСИМОЕ УСТРОЙСТВО С ФУНКЦИЕЙ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОЙ ТЕМПЕРАТУРЫ ТЕЛА ПОЛЬЗОВАТЕЛЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОЙ ТЕМПЕРАТУРЫ ТЕЛА ПОЛЬЗОВАТЕЛЯ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА И СИСТЕМА, СОДЕРЖАЩАЯ НОСИМОЕ УСТРОЙСТВО | 2023 |
|
RU2804226C1 |
| НЕЙРОФИЗИОЛОГИЧЕСКИЙ МОНИТОРИНГ ДЛЯ ПРОСПЕКТИВНОГО СТРОБИРОВАНИЯ ДВИЖЕНИЙ В РАДИОЛОГИЧЕСКОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2695250C2 |
| Способ и устройство для определения местоположения носимого устройства | 2015 |
|
RU2628330C1 |
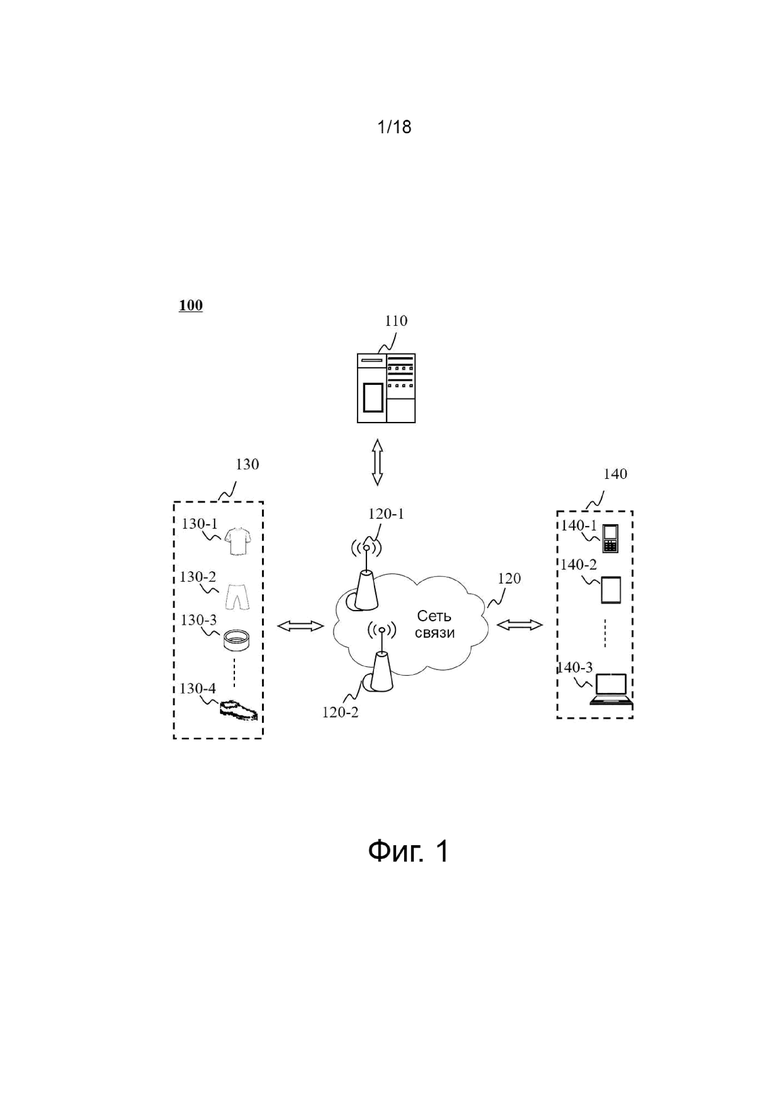
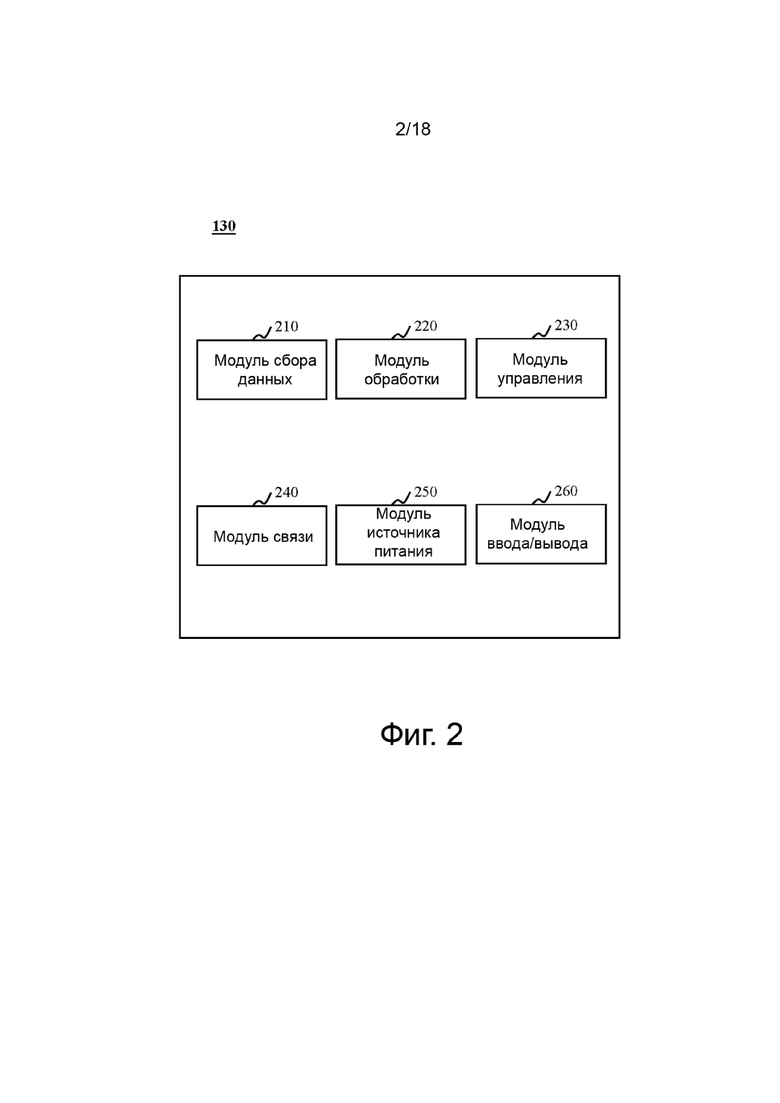
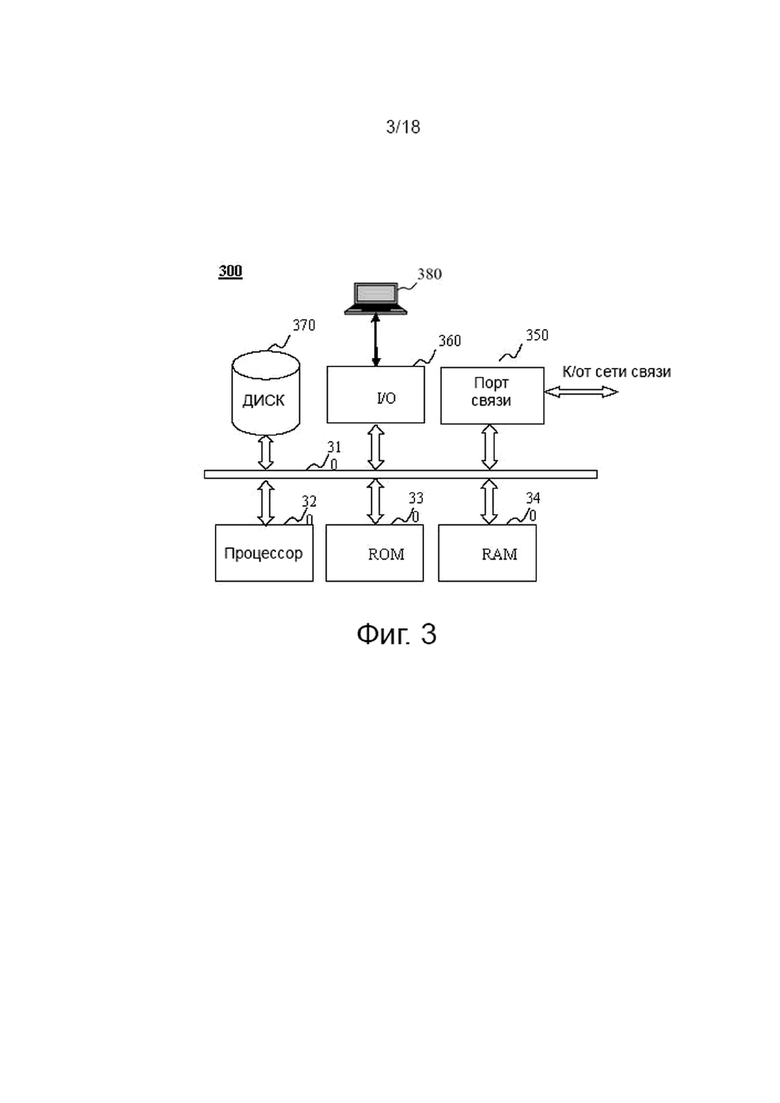
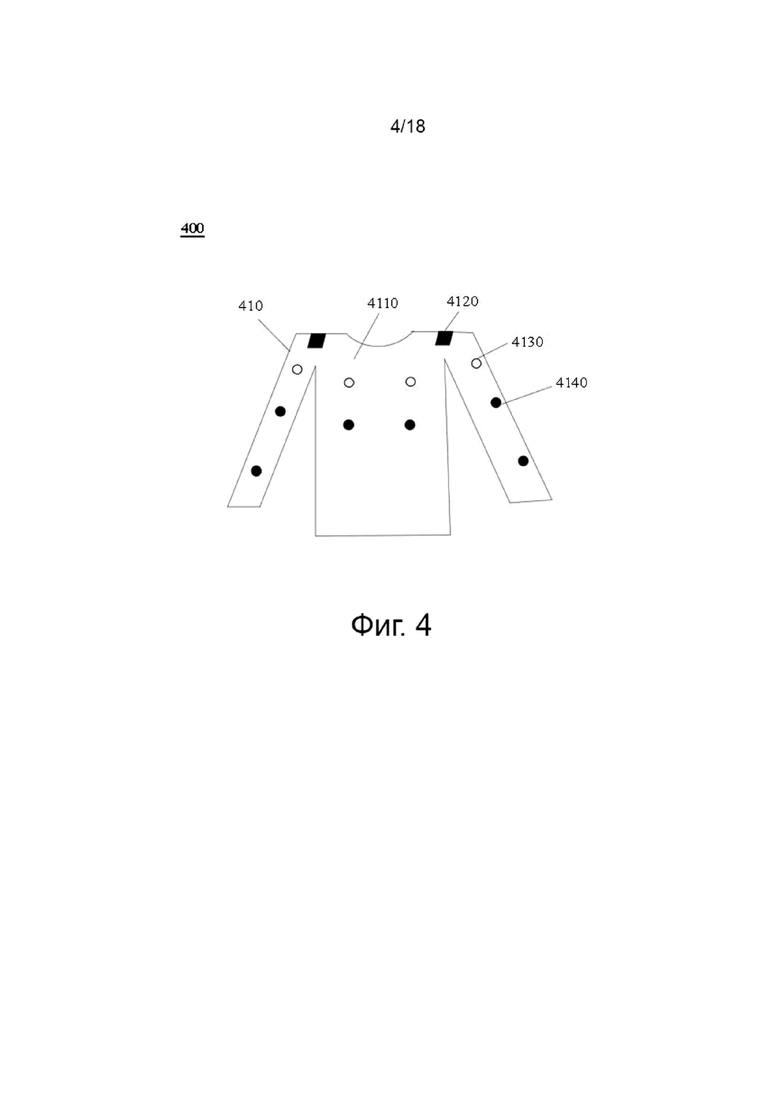
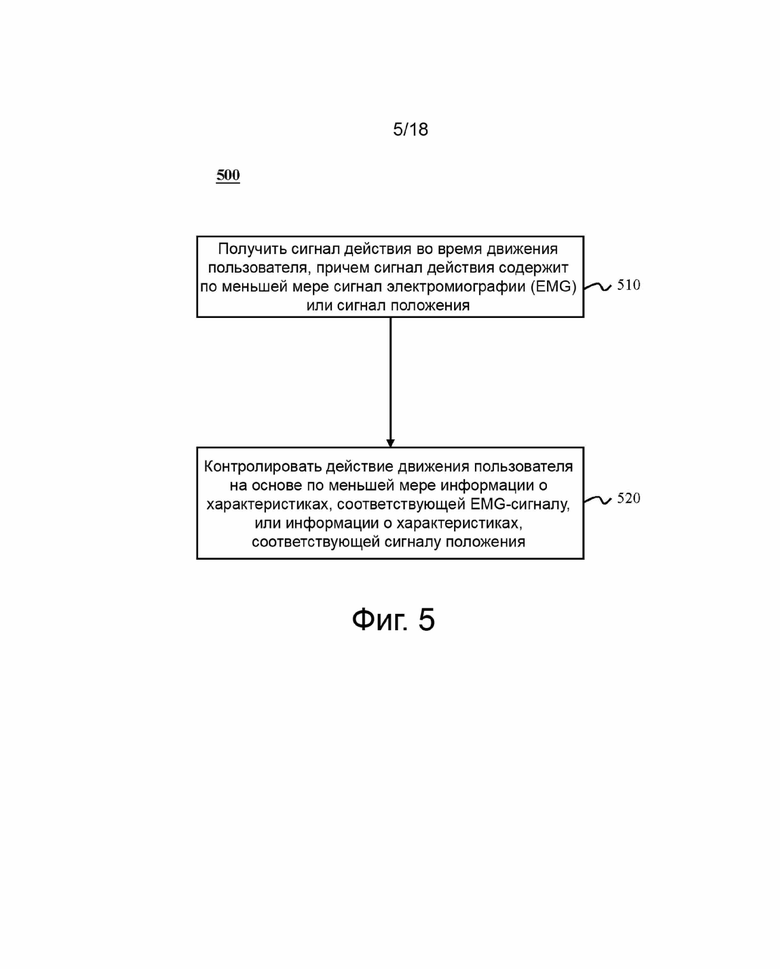
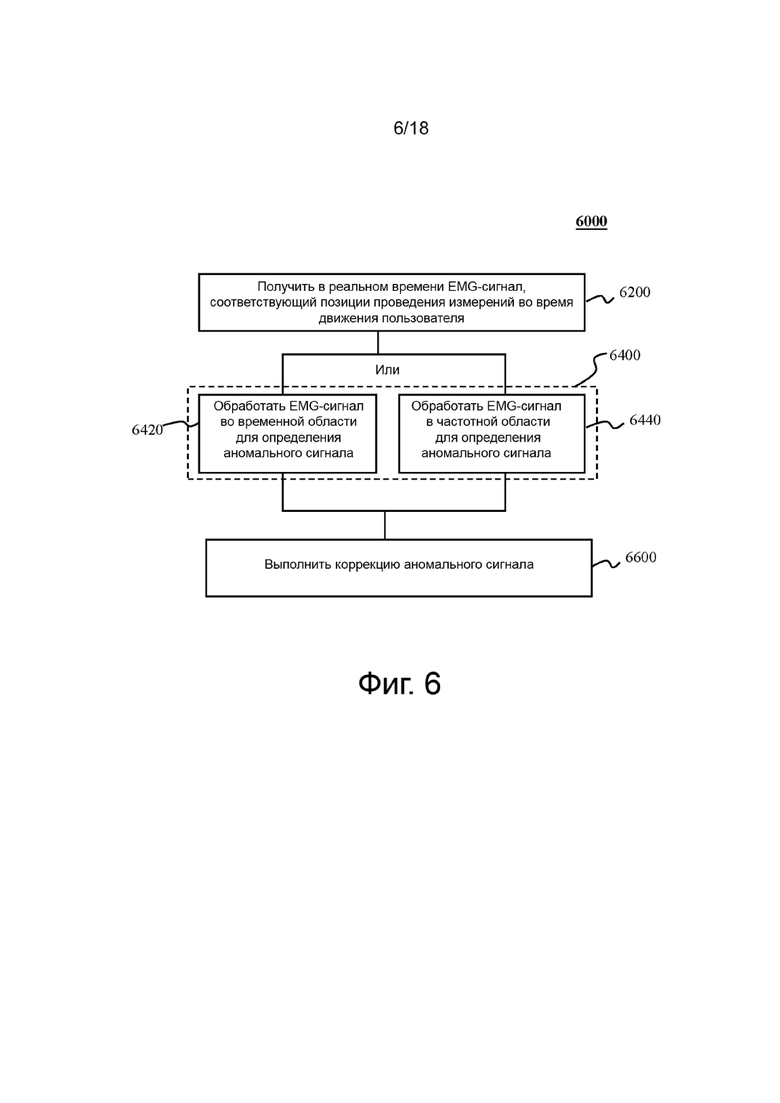
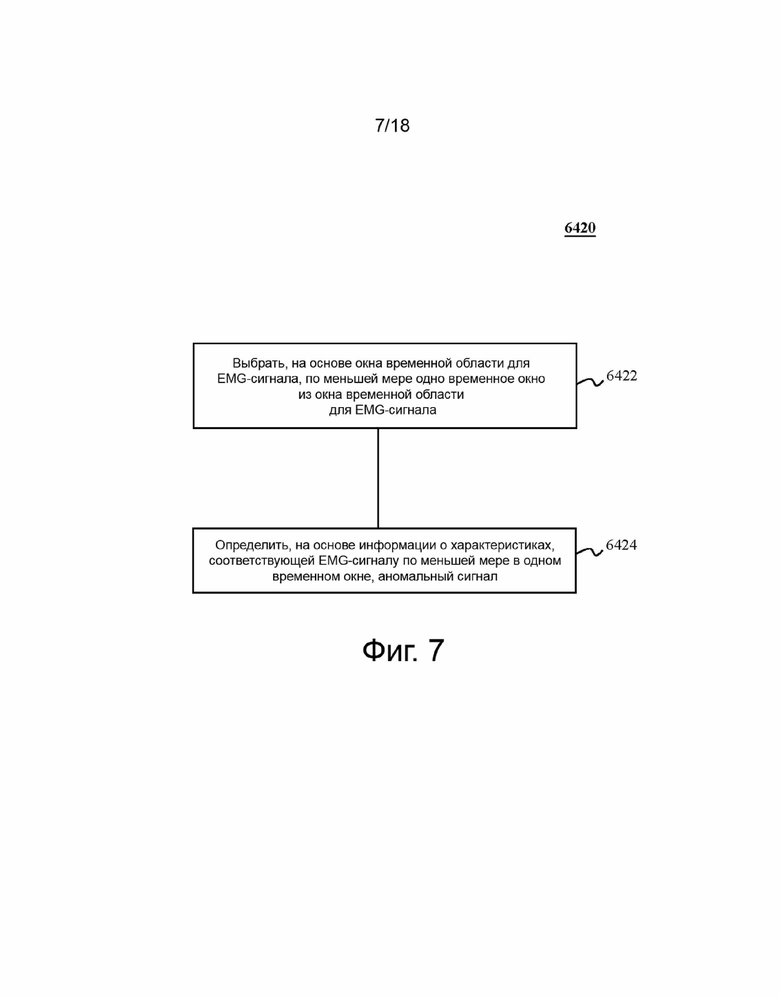
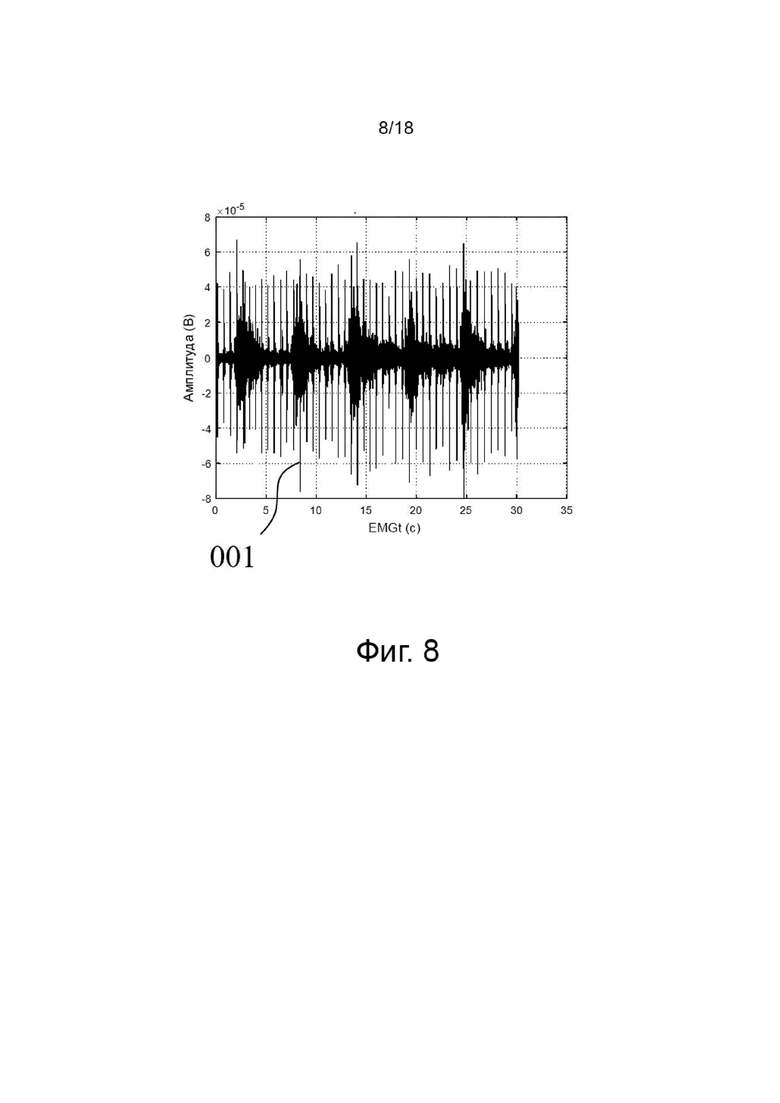
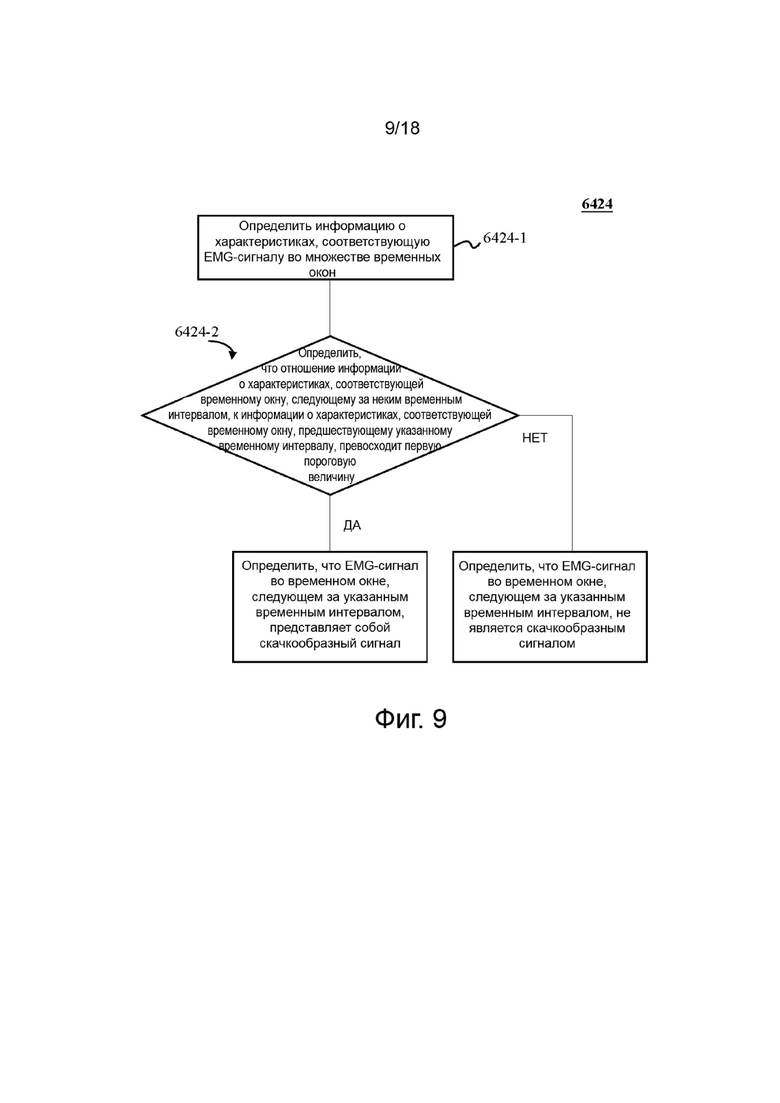
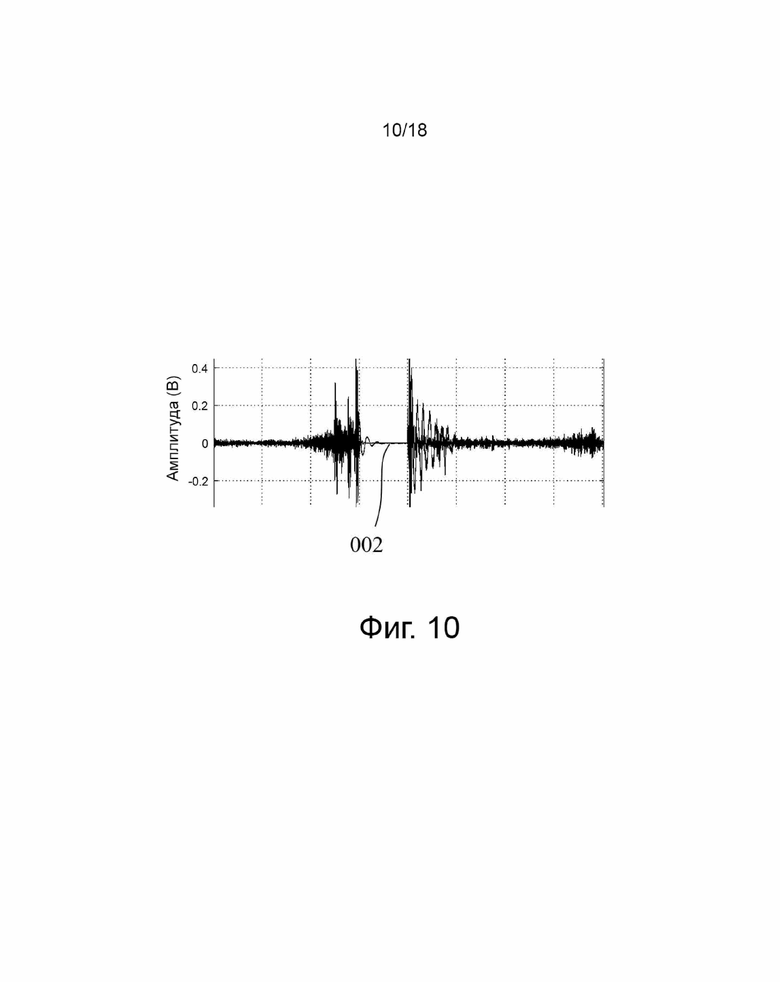
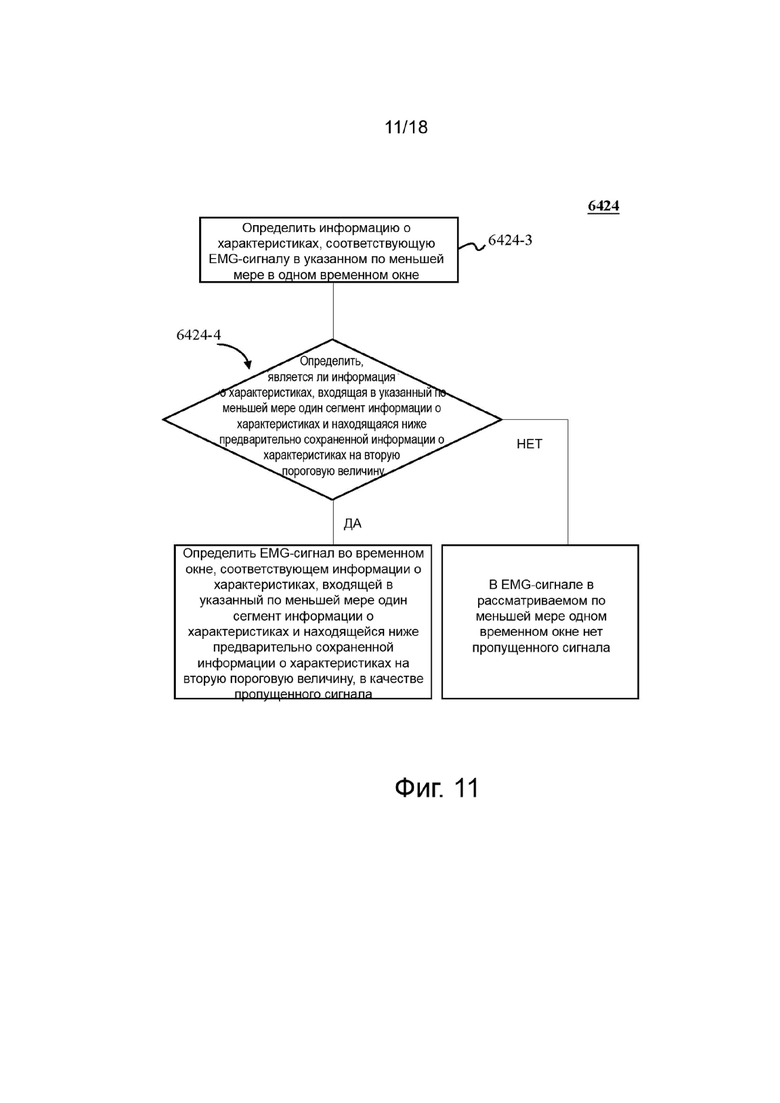
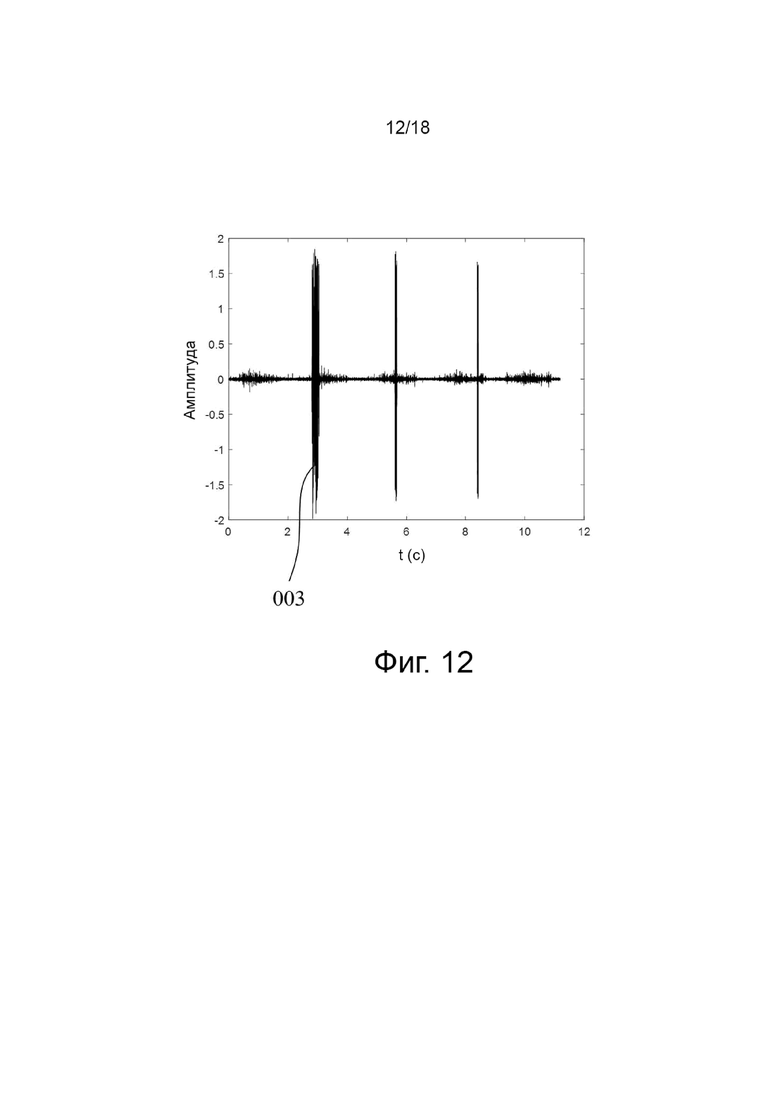
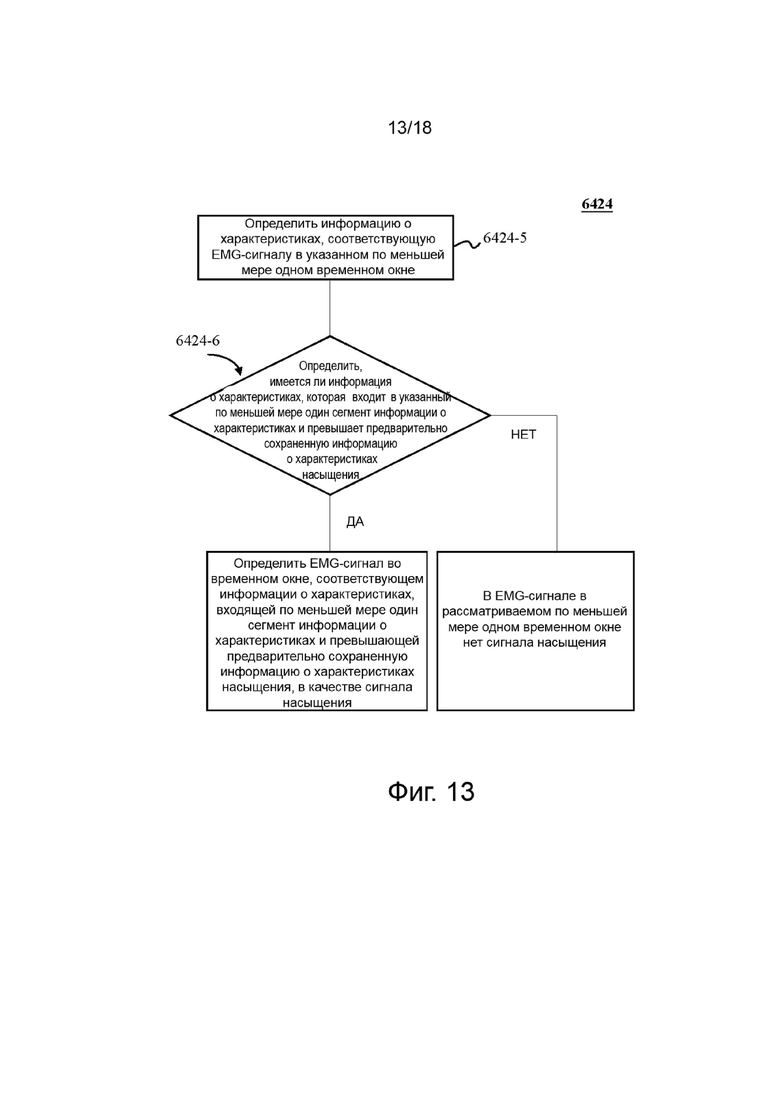
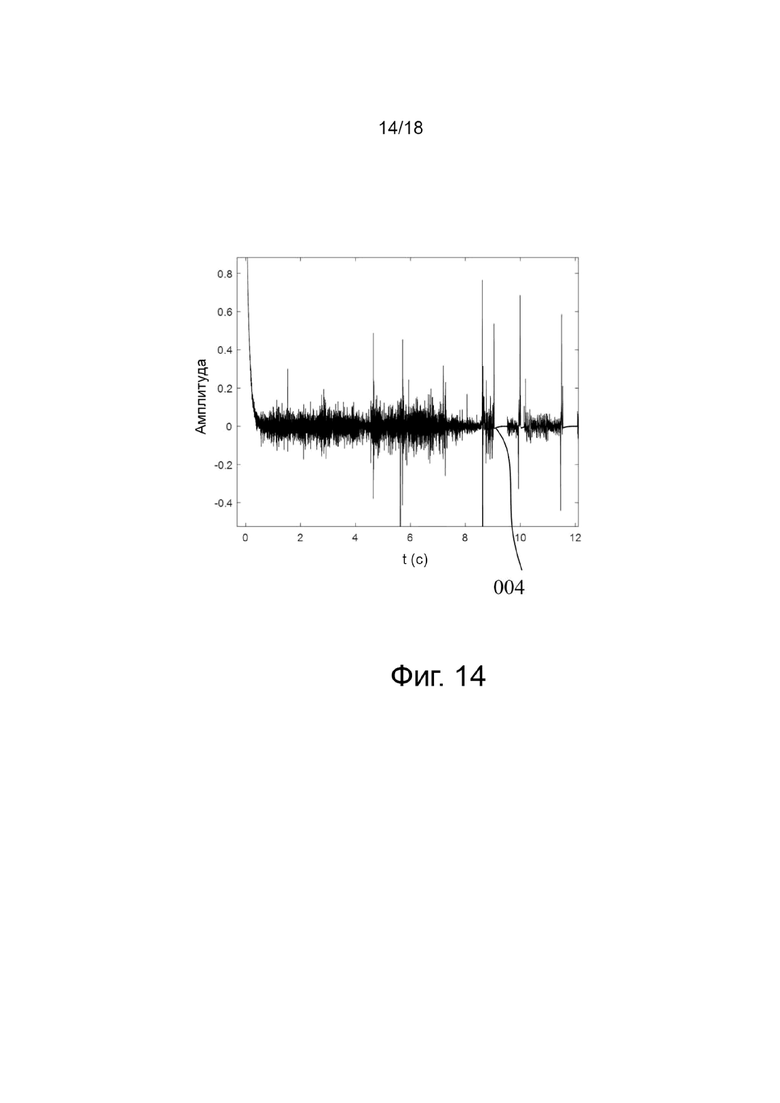
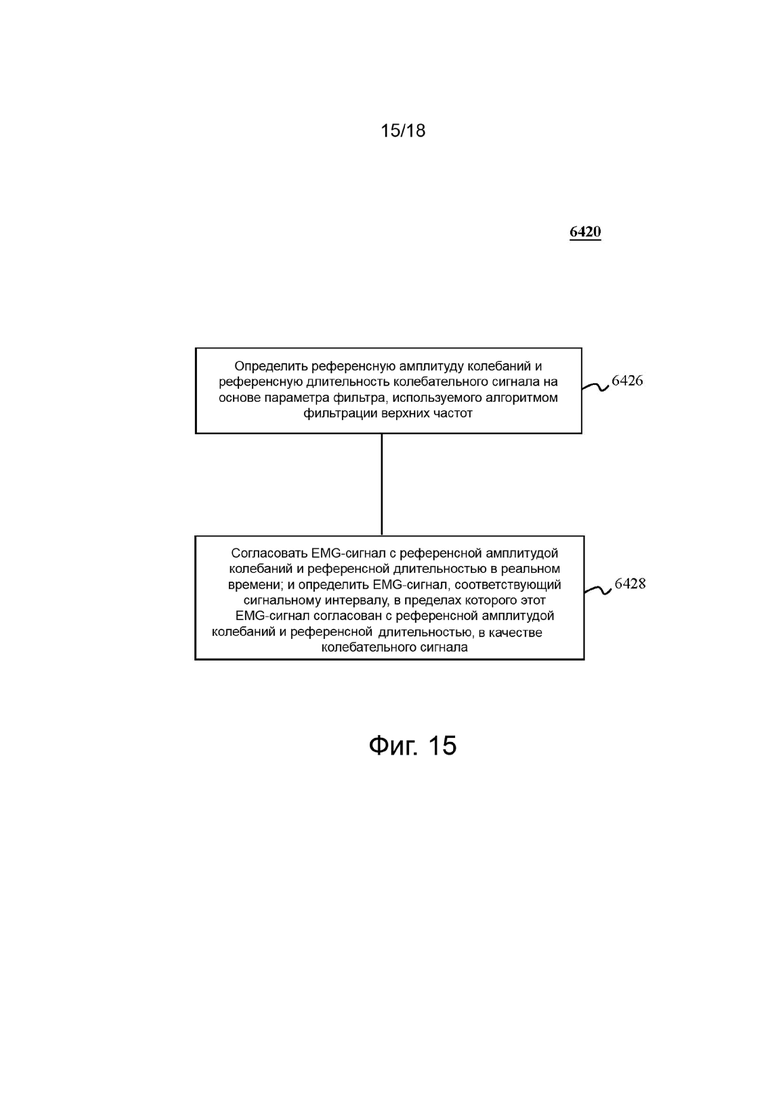
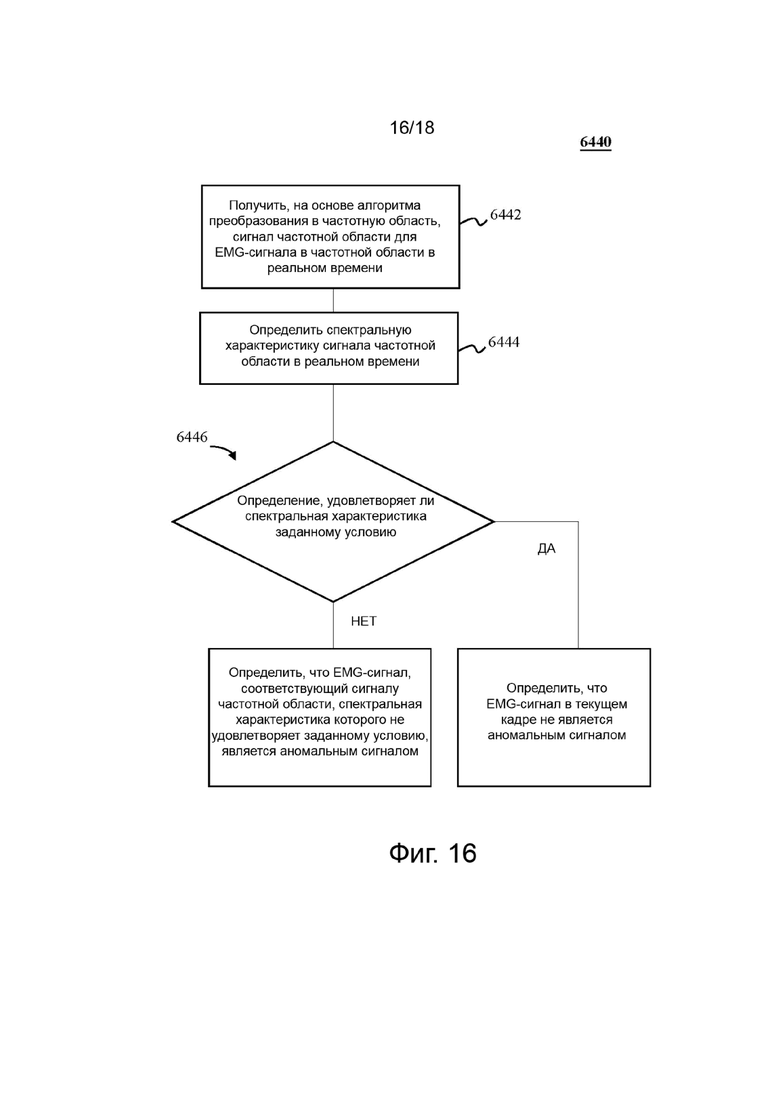
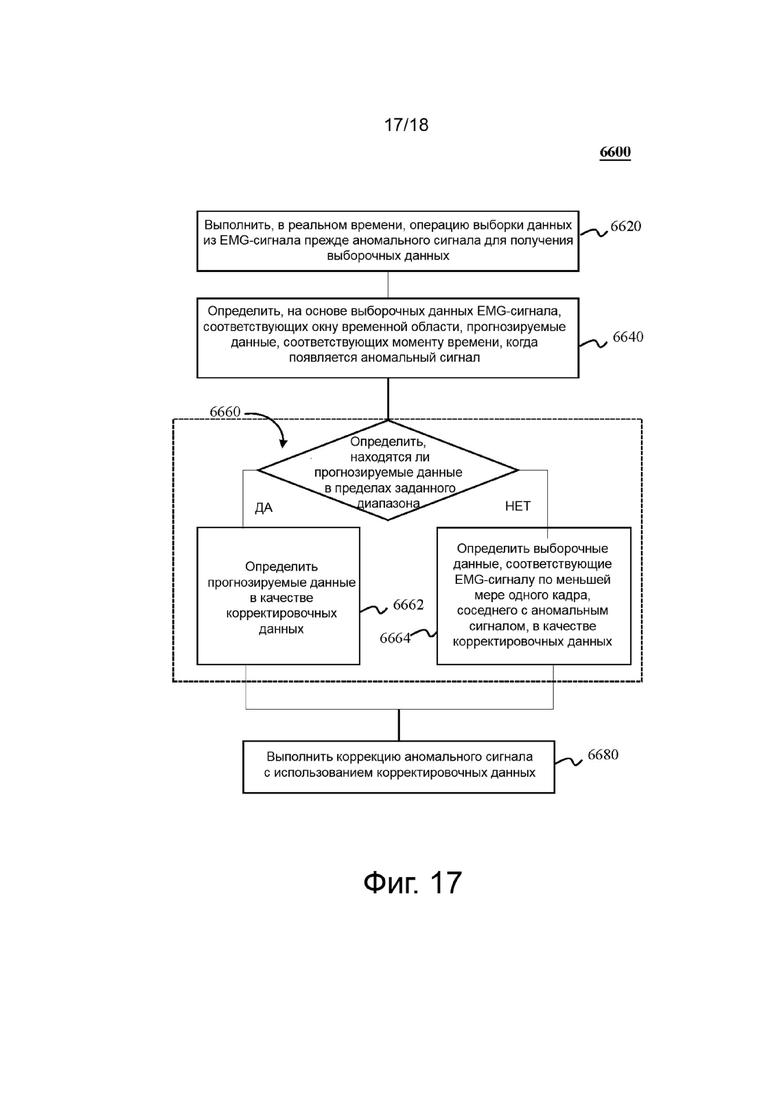
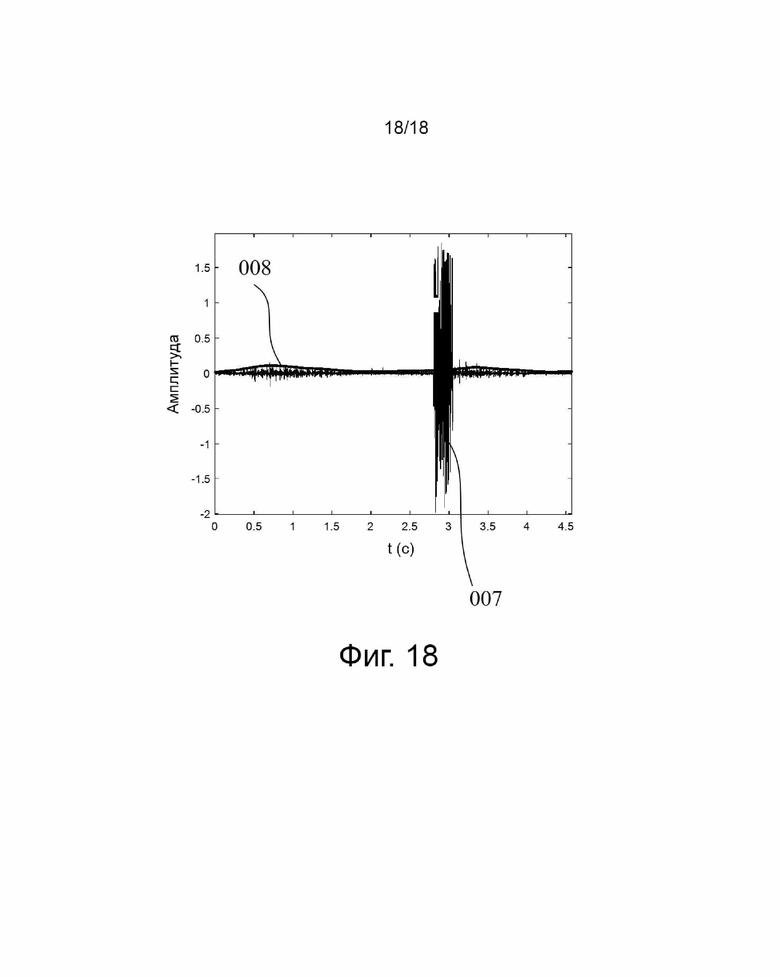
Группа изобретений относится к медицинской технике, а именно к области носимых устройств. Способ обработки данных движения пользователя осуществляют с помощью системы контроля движения. При этом получают в реальном времени EMG-сигнал, соответствующий позиции проведения измерений во время движения пользователя. Определяют на основе EMG-сигнала аномальный сигнал в EMG-сигнале. Выполняют коррекцию аномального сигнала посредством его замены корректировочными данными, которые соответствуют моменту времени появления аномального сигнала. На этапе определения аномального сигнала обрабатывают EMG-сигнал во временной и частотной областях. На этапе выполнения коррекции аномального сигнала выполняют в реальном времени операцию выборки данных из EMG-сигнала, предшествующему аномальному сигналу. Определяют на основе выборочных данных, соответствующих окну временной области EMG-сигнала, прогнозируемые данные, соответствующие моменту времени появления аномального сигнала. Определяют на основе прогнозируемых данных корректировочные данные, соответствующие моменту времени появления аномального сигнала. Выполняют коррекцию аномального сигнала с использованием корректировочных данных. Достигается повышение точности идентификации аномального сигнала с обеспечением скорректированного аномального сигнала соответствующим сигналу действия во время фактического движения пользователя, тем самым улучшая восприятие пользователем. 2 н. и 7 з.п. ф-лы, 18 ил.
1. Способ обработки данных движения пользователя, содержащий этапы, на которых:
получают, в реальном времени, электромиографический (EMG) сигнал, соответствующий позиции проведения измерений во время движения пользователя;
определяют, на основе EMG-сигнала, аномальный сигнал в EMG-сигнале; и
выполняют коррекцию аномального сигнала посредством замены аномального сигнала корректировочными данными, причем корректировочные данные соответствуют моменту времени появления аномального сигнала, при этом
на этапе определения, на основе EMG-сигнала, аномального сигнала в EMG-сигнале:
обрабатывают EMG-сигнал во временной области для определения аномального сигнала; или
обрабатывают EMG-сигнал в частотной области для определения аномального сигнала;
а на этапе выполнения коррекции аномального сигнала:
выполняют в реальном времени операцию выборки данных из EMG-сигнала, предшествующему аномальному сигналу, для получения выборочных данных;
определяют, на основе выборочных данных, соответствующих окну временной области EMG-сигнала, прогнозируемые данные, соответствующие моменту времени появления аномального сигнала;
определяют, на основе прогнозируемых данных, корректировочные данные, соответствующие моменту времени появления аномального сигнала; и
выполняют коррекцию аномального сигнала с использованием корректировочных данных.
2. Способ обработки данных движения пользователя по п. 1, в котором на этапе обработки EMG-сигнала во временной области для определения аномального сигнала:
выбирают, на основе окна временной области в EMG-сигнале, по меньшей мере одно временное окно из множества временных окон в указанном окне временной области в EMG-сигнале, причем каждое из указанного по меньшей мере из одного временного окна охватывает свой временной интервал; и
определяют, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномальный сигнал.
3. Способ обработки данных движения пользователя по п. 2, в котором аномальный сигнал содержит скачкообразный сигнал, при этом указанное по меньшей мере одно временное окно содержит множество временных окон, причем на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномального сигнала:
определяют информацию о характеристиках, соответствующую EMG-сигналу в указанном множестве временных окон; и
определяют, что отношение информации о характеристиках, соответствующей временному окну, следующему за временным интервалом, к информации о характеристиках, соответствующей временному окну, предшествующему указанному временному интервалу, превышает заданное первое пороговое значение, и считают EMG-сигнал во временном окне, следующем за указанным временным интервалом, скачкообразным сигналом.
4. Способ обработки данных движения пользователя по п. 2, в котором аномальный сигнал содержит пропущенный сигнал, причем на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномального сигнала:
определяют по меньшей мере один сегмент информации о характеристиках, соответствующий EMG-сигналу в указанном по меньшей мере одном временном окне; и
считают EMG-сигнал во временном окне, соответствующий информации о характеристиках, которая содержится в указанном по меньшей мере одном сегменте информации о характеристиках и находится ниже предварительно сохраненной информации о характеристиках второго порогового значения, пропущенным сигналом.
5. Способ обработки данных движения пользователя по п. 2, в котором аномальный сигнал содержит сигнал насыщения, причем на этапе определения, на основе информации о характеристиках, соответствующей EMG-сигналу в указанном по меньшей мере одном временном окне, аномального сигнала:
определяют по меньшей мере один сегмент информации о характеристиках, соответствующий EMG-сигналу в указанном по меньшей мере одном временном окне; и
считают EMG-сигнал во временном окне, соответствующий информации о характеристиках, которая содержится в указанном по меньшей мере одном сегменте информации о характеристиках и превышает предварительно сохраненную информацию о характеристиках насыщения, сигналом насыщения.
6. Способ обработки данных движения пользователя по п. 1, в котором аномальный сигнал дополнительно содержит колебательный сигнал, полученный в результате использования алгоритма фильтрации верхних частот, причем на этапе обработки EMG-сигнала во временной области для определения аномального сигнала:
определяют референсную амплитуду колебаний и референсную длительность колебательного сигнала на основе параметра фильтра, используемого алгоритмом фильтрации верхних частот; и
сопоставляют EMG-сигнал с референсной амплитудой колебаний и референсной длительностью в реальном времени; и
считают EMG-сигнал, соответствующий сигнальному интервалу, в котором EMG-сигнал соответствует референсной амплитуде колебаний и референсной длительности, колебательным сигналом.
7. Способ обработки данных движения пользователя по п. 1, в котором на этапе определения, на основе выборочных данных, соответствующих окну временной области EMG-сигнала, прогнозируемых данных, соответствующих моменту времени появления аномального сигнала, выполняют по меньшей мере одно из:
определения, на основе выборочных данных, соответствующих указанному окну временной области, аппроксимирующей функции;
определения, на основе аппроксимирующей функции, прогнозируемых данных, соответствующих моменту времени появления аномального сигнала; или
определения, на основе выборочных данных, соответствующих указанному окну временной области, и обученной сети долго-кратковременной памяти (LSTM), прогнозируемых данных, соответствующих моменту времени появления аномального сигнала.
8. Способ обработки данных движения пользователя по п. 1, в котором на этапе определения, на основе прогнозируемых данных, корректировочных данных, соответствующих моменту времени появления аномального сигнала:
в ответ на определение, что прогнозируемые данные находятся в пределах заданного диапазона, считают прогнозируемые данные корректировочными данными, причем заданный диапазон содержит диапазон данных, образованный максимальным значением и минимальным значением EMG-сигнала в окне временной области; или
в ответ на определение, что прогнозируемые данные находятся вне заданного диапазона, считают выборочные данные, соответствующие EMG-сигналу, соседствующему с аномальным сигналом в пределах по меньшей мере одного кадра, корректировочными данными.
9. Система контроля движения пользователя, содержащая:
по меньшей мере один носитель для хранения информации, хранящий по меньшей мере один набор команд для обработки данных движения; и
по меньшей мере один процессор, осуществляющий связь с указанным по меньшей мере одним носителем для хранения информации, при этом при работе системы контроля движения пользователя указанный по меньшей мере один процессор считывает указанный по меньшей мере один набор команд и выполняет способ обработки данных движения по любому из пп. 1-8.
| CN 107361773 A, 21.11.2017 | |||
| CN 111317446 A, 23.06.2020 | |||
| US 2014207017 A1, 24.07.2014 | |||
| US 2020401224 A1, 24.12.2020 | |||
| WO 2020096553 A1, 14.05.2020 | |||
| KR 20180086547 A, 01.08.2018 | |||
| CN 104720787 A, 24.06.2015 | |||
| СПОСОБ РАННЕЙ ДИАГНОСТИКИ ПЛОСКОВАЛЬГУСНОЙ ДЕФОРМАЦИИ СТОП У ДЕТЕЙ | 2014 |
|
RU2551193C1 |
