Заявление приоритета
Настоящая заявка испрашивает приоритет по предварительной патентной заявке США № 61/884,590 под названием «ГРАДИЕНТОМЕТРИЧЕСКОЕ ИЗМЕРЕНИЕ ДАЛЬНОСТИ ЗАБОЯ СКВАЖИНЫ ДЛЯ T-ОБРАЗНОГО ПЕРЕСЕЧЕНИЯ И ОБХОДА СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАТЧИКОВ И ПРИЕМНЫХ УСТРОЙСТВ, СОДЕРЖАЩИХ МАГНИТНЫЕ ДИПОЛИ», поданной 30 сентября, 2013 г., заявителями которой также являются Donderici и др., описание которой полностью включено в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к измерению дальности забоя скважины, а в частности, к устройству для измерения дальности, использующему магнитные дипольные передатчики и приемные устройства, анализирующие градиентометрические данные для определения и отслеживания относительного положения множества пересекающихся стволов скважины, которые в настоящем описании также именованы стволами скважины, образующими «Т-образное пересечение».
УРОВЕНЬ ТЕХНИКИ
На некоторых участках может требоваться строительство буровых вышек, расположенных близко друг к другу, вследствие юридических или природных ограничений территории. За этим может следовать направленное бурение скважин под землей для охватывания большого участка земли. В этих случаях важно установить наличие других скважин для предотвращения опасностей, таких как выбросы. Однако при бурении скважины вдоль пути, пересекающего другую скважину (например, горизонтальная скважина при наличии вертикальных скважин), определение места расположения второй скважины традиционными способами может быть затруднено.
Следовательно, в различных скважинных применениях требуется точное и эффективное определение расположения и направления проводящей трубы (металлической обсадной колонны, например). Например, одно применение заключается в применении в случае выброса скважины, при котором целевая скважина подлежит точному пересечению разгрузочной скважиной для остановки выброса. Другие применения включают обход скважины, при котором обнаружение и обход скважины осуществляют во время бурения скважины.
В нескольких известных способах были предприняты попытки предоставления решений этих проблем. В одном способе рамочные антенны используют в качестве передатчиков, измеряют амплитуду полей, индуцированных на целевую обсадную колонну, и осуществляют определение положения и расстояния цели на основании этих измерений. Однако так как амплитуда поля находится под сильным воздействием характеристик обсадной колонны и формации, точность этого способа может оставаться низкой. В другом способе для индуцирования тока на целевую обсадную колонну используют источник электродного типа. В этом способе измеряют градиент магнитного поля, излучаемый целевой обсадной колонной, в дополнение к самому магнитному полю. Посредством использования зависимости между магнитным полем и его градиентом, расстояние к целевой обсадной колонне может быть определено и использовано для обхода или пересечения. Однако этот способ может быть нечувствительным при возникновении фактического Т-образного пересечения вследствие гашения полей на участке приемного устройства.
Соответственно, в данной области техники существует необходимость в улучшенных способах измерения дальности забоя скважины, применяемых в случаях Т-образного пересечения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1A и 1B представлены упрощенные изображения системы относительного позиционирования в соответствии с частными иллюстративными вариантами реализации настоящего изобретения.
На фиг. 2 представлена блок-схема схем обработки, использованных в системе относительного позиционирования, в соответствии с частными иллюстративными вариантами реализации настоящего изобретения.
На фиг. 3 представлен упрощенный иллюстративный вариант реализации системы относительного позиционирования, использованный для описания способа настоящего изобретения.
На фиг. 4 представлена упрощенная геометрия системы относительного позиционирования, проходящая по всей плоскости, поперечной относительно оси целевой скважины, в соответствии с частными иллюстративными вариантами реализации настоящего изобретения.
На фиг. 5 представлен упрощенный вариант реализации системы относительного позиционирования, использующей пару понижающих приемных устройств в вычислениях градиента, в соответствии с частными иллюстративными вариантами реализации настоящего изобретения.
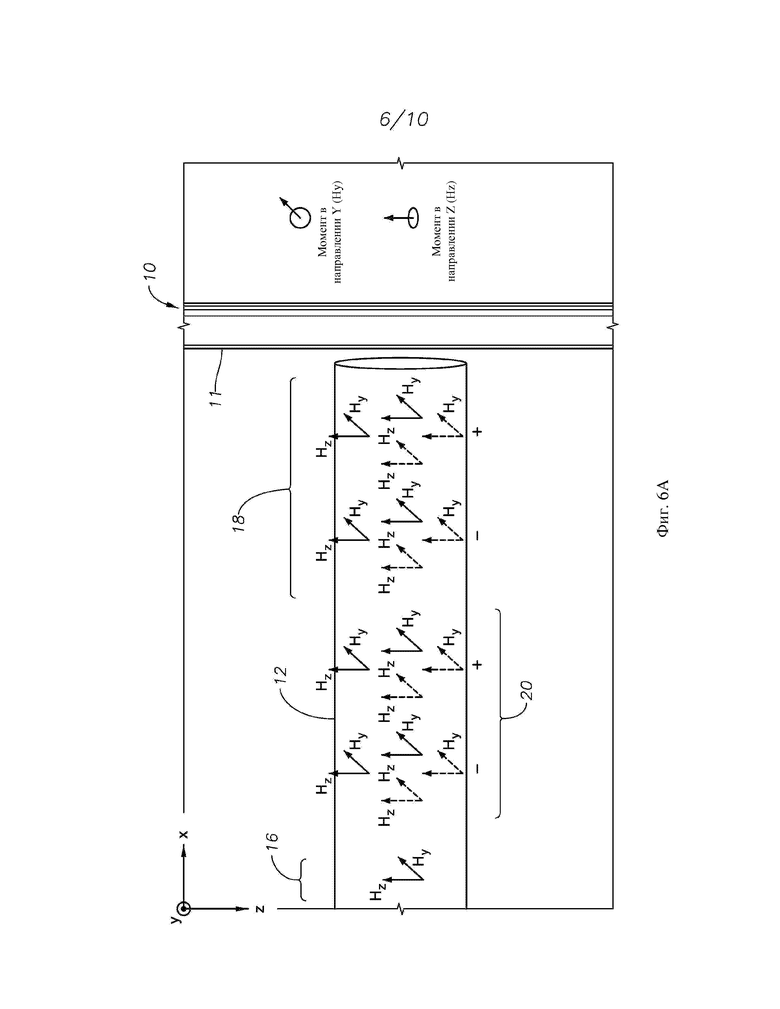
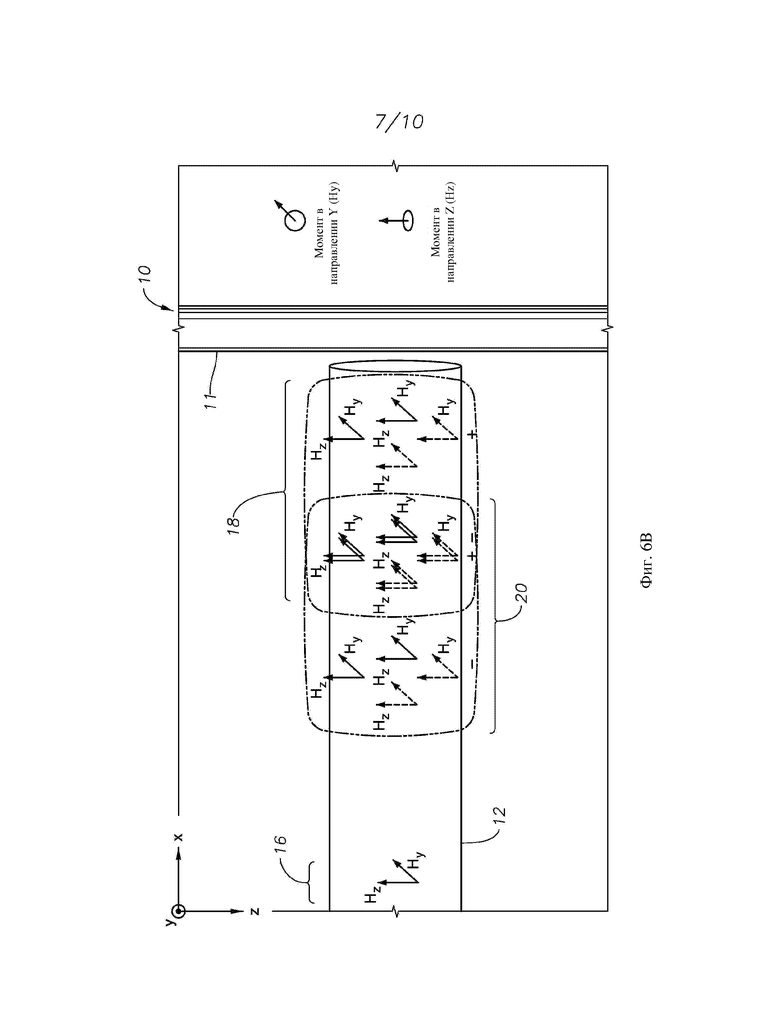
На фиг. 6A-B представлены упрощенные варианты реализации альтернативного варианта реализации системы относительного позиционирования.
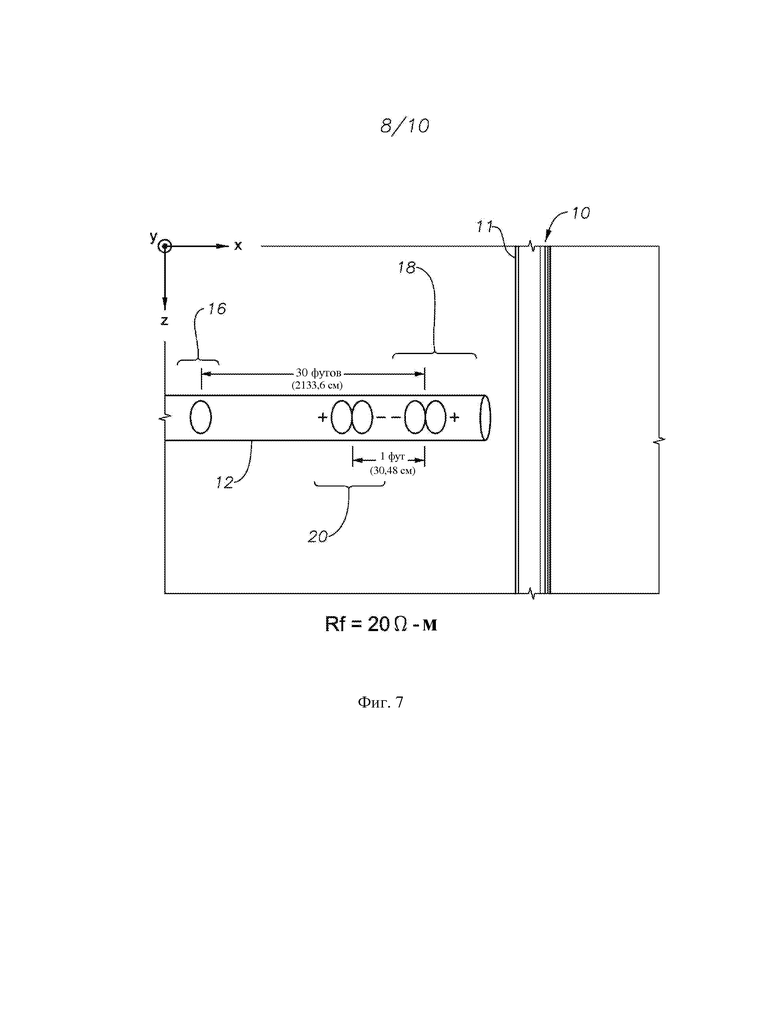
На фиг. 7 представлена упрощенная геометрия моделирования, основанного на иллюстративном варианте реализации настоящего изобретения.
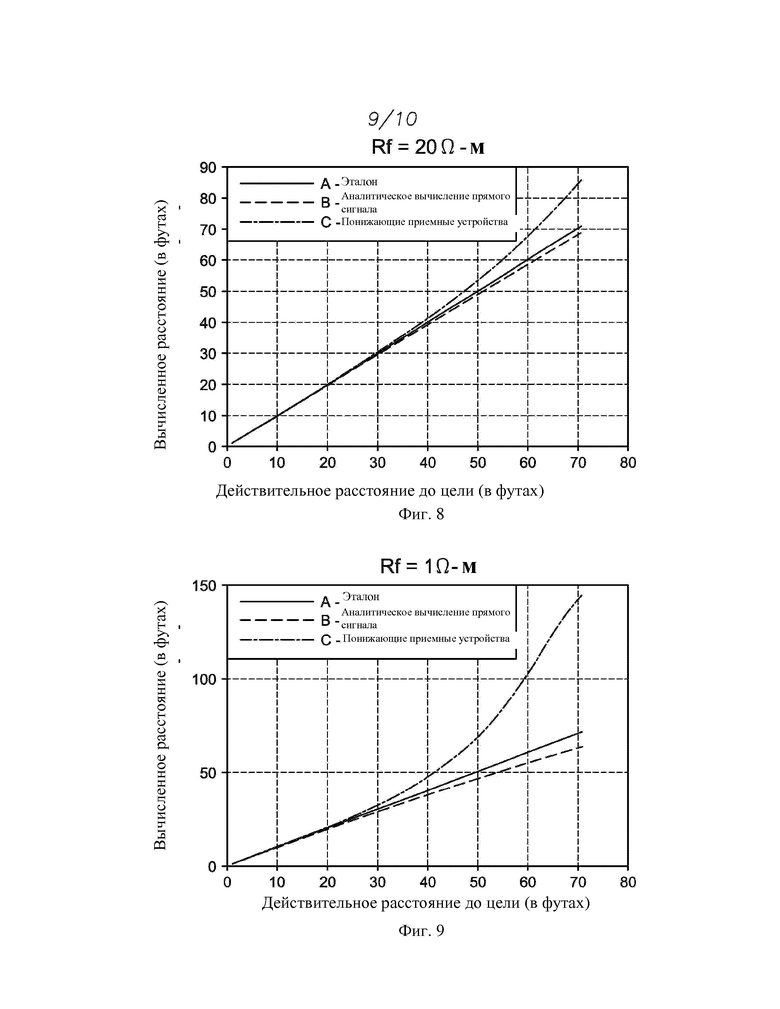
На фиг. 8 вычисленное расстояние в случае применения с Т-образным пересечением с использованием иллюстративной системы представлено как зависимость от эталонных результатов в однородной формации.
На фиг. 9 вычисленное расстояние в случае применения с Т-образным пересечением с использованием иллюстративной системы представлено как зависимость от эталонных результатов в однородной формации.
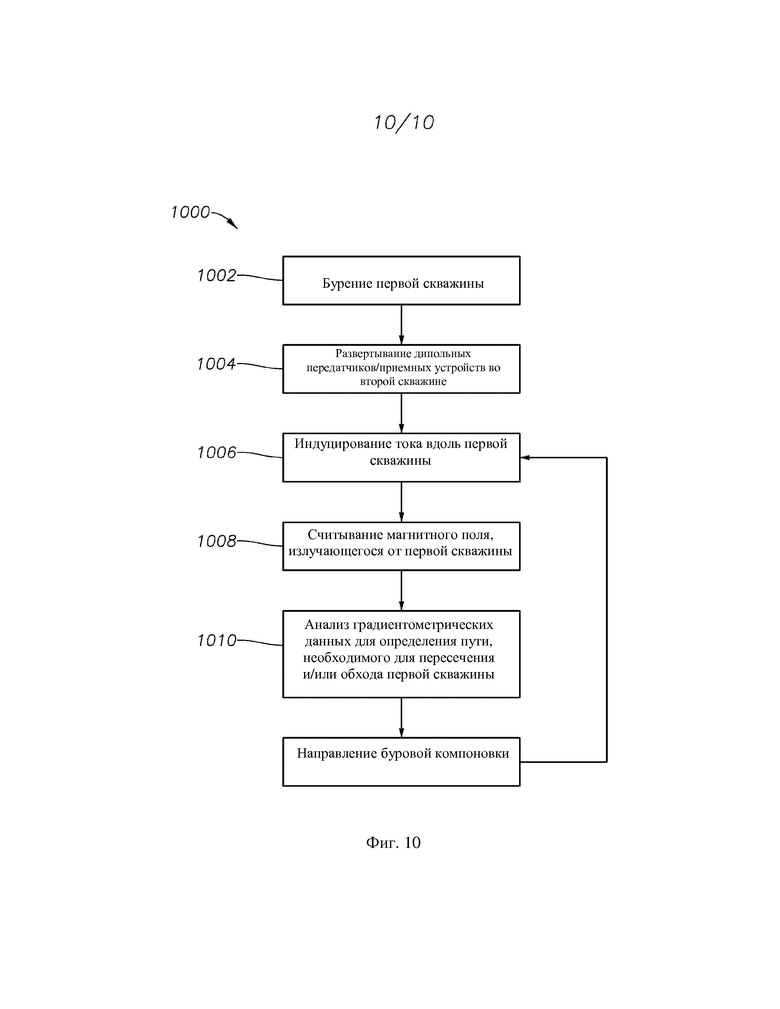
На фиг. 10 представлена блок схема способа измерения дальности, используемого системой относительного позиционирования для определения расстояния между первым (т.е., целевым) и вторым стволом скважины, необходимого для осуществления пересечения и/или обхода, в соответствии с частными иллюстративными способами настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Иллюстративные варианты реализации и относящиеся к ним способы настоящего изобретения описаны далее, так как они могут быть использованы в системе измерения дальности и способе использования магнитных дипольных передатчиков/приемных устройств для анализа градиентометрических данных и, таким образом бурения и/или отслеживания относительного положения стволов скважины с Т-образным пересечением. В целях ясности в настоящем описании описаны не все элементы фактического варианта реализации или способа. Следует понимать, что в разработке любого такого фактического варианта реализации необходимо принятие множества решений относительно реализации для достижения частных целей разработчика, например, соответствие относящимся к системе и бизнесу ограничениям, которые отличаются в различных вариантах реализации. Кроме того, следует понимать, что разработка может быть сложной и занимать много времени, но будет рутинной процедурой для специалистов в настоящей области техники, имеющих возможность ознакомления с настоящим описанием. Другие аспекты и преимущества различных вариантов реализации и относящихся к ним способов изобретения будут понятны после ознакомления со следующим описанием и чертежами.
Как описано в настоящем описании, иллюстративные варианты реализации и способы настоящего изобретения описывают системы измерения дальности, использующие градиентометрические данные для определения расстояния между первой и второй скважиной с целью обхода или пересечения скважины без наличия или использования сведений о характеристиках скважины или формации. В целом, это может быть достигнуто посредством развертывания скважинного оборудования, содержащего магнитные дипольные передатчики и приемные устройства, вдоль понижающих приемных устройств, расположенных между передатчиками и приемными устройствами. Магнитные диполи могут быть реализованы в различных формах, включая, например, катушки, соленоиды или магнетометры. Электромагнитное поле образуют передатчиками и индуцируют на целевую обсадную колонну для образования, таким образом, второстепенного электромагнитного поля вдоль обсадной колонны. Индуцированный ток проходит в одинаковом осевом направлении по всей целевой обсадной колонне, таким образом, поддерживая чувствительность к целевой скважине в Т-образном пересечении. Сумму этого второстепенного магнитного поля в дополнение к прямому полю, исходящему от передатчика, измеряют посредством совокупности приемных устройств. Понижающие приемные устройства сконфигурированы таким образом, чтобы иметь поляризацию, противоположную основной совокупности приемных устройств, для устранения, таким образом, прямого сигнала между передатчиком и приемным устройством. Путем использования измерений магнитного поля от различных приемных устройств в совокупности приемных устройств может быть вычислен градиент магнитного поля. Затем, путем использования различных алгоритмов, описанных в настоящем описании, схемы обработки, расположенные на скважинном оборудовании (или удаленно), анализируют градиентометрические данные для определения расстояния и направления к целевой скважине с T-образным пересечением.
Несмотря на то, что настоящее изобретение может быть использовано в различных применениях (проводная линия, например), следующее описание будет направлено на применения для точного и надежного определения расположения скважины, бурение которой осуществляют, «разгрузочной/пересекающей» скважины (т.е., второй скважины), относительно находящейся рядом целевой первой скважины, обычно скважины с неуправляемыми выбросами, таким образом, чтобы обеспечивать пересечение или обход второй скважиной целевой скважины в зависимости от требований. Целевая скважина должна иметь большую проводимость, чем окружающая формация, что может быть обеспечено путем использования вытянутого проводящего элемента вдоль целевой скважины, такого как, например, обсадная колонна, которая обычно присутствует в большинстве скважин для сохранения целостности скважины.
Способы и системы этого изобретения в частности предпочтительны для операций бурения разгрузочных скважин и/или обхода скважины. В применении обхода скважины бурение скважины осуществляют с использованием системы определения положения, описанной в настоящем описании, которая осуществляет активный поиск других скважин (или других вытянутых проводящих конструкций), по пути бурения. При обнаружении таких скважин или конструкций система определения положения соответственно изменяет путь бурения. Эти и другие применения и/или модификации будут понятны специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием.
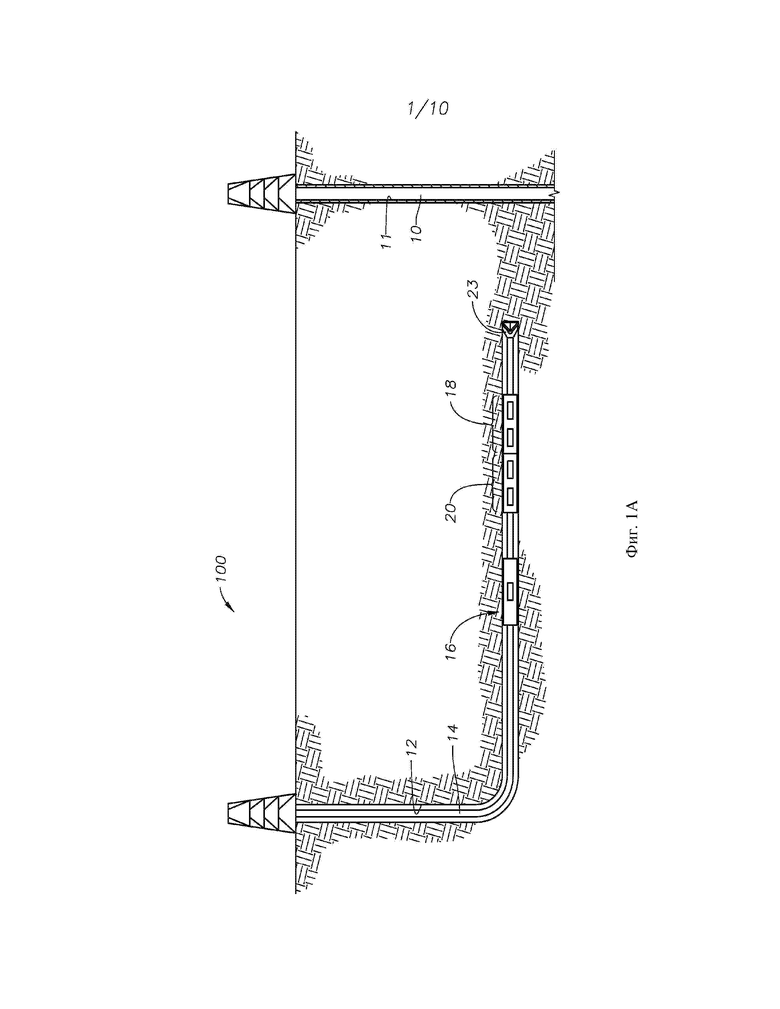
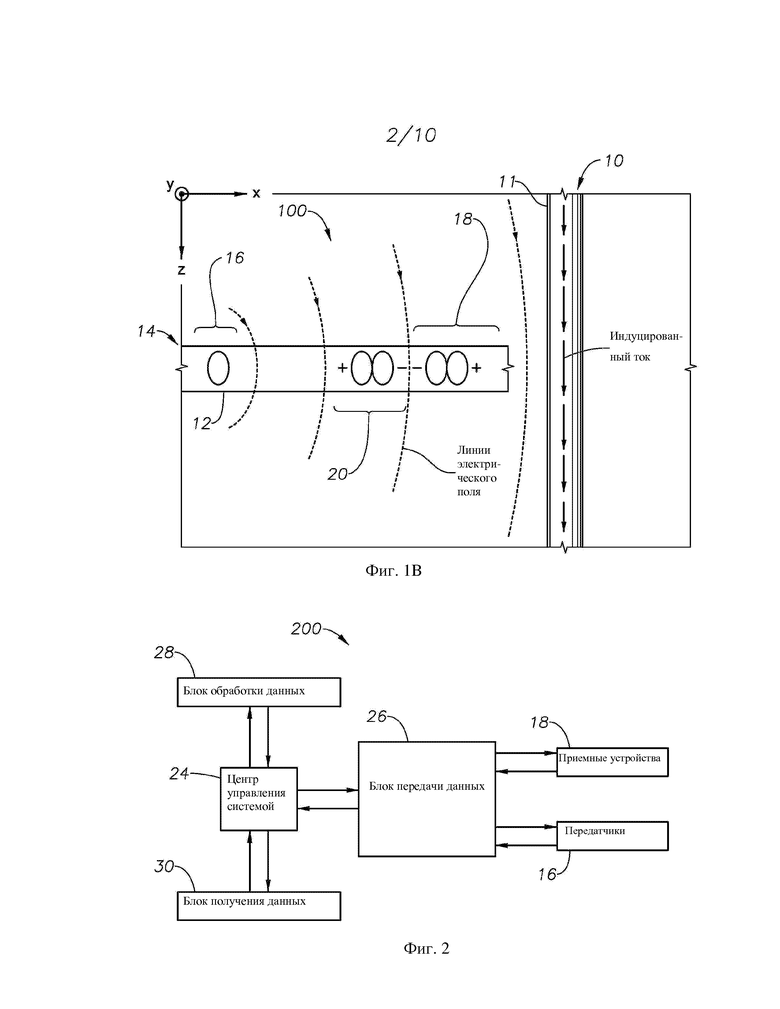
На фиг. 1A и 1B представлены упрощенные воспроизведения системы 100 относительного позиционирования в соответствии с приведенным в качестве примера вариантом реализации настоящего изобретения. В этом варианте реализации скважину 10 пробурили и обсадили обсадной колонной 11 с использованием любого подходящего способа бурения, а затем произошел выброс. Затем осуществляют бурение разгрузочной скважины 12 с использованием долота 23 буровой компоновки 14, которая может являться, например, компоновкой, осуществляющей каротаж во время бурения (logging-while drilling, «LWD»), или буровой компоновкой, осуществляющей измерения в процессе бурения (measurement-while drilling,«MWD»), или другой требуемой буровой компоновкой.
В этом приведенном в качестве примера варианте реализации буровая компоновка 14 содержит низ бурильной колонны, содержащий один или большее количество магнитных дипольных передатчиков 16. Как изображено на фиг. 1B, буровая компоновка 14 содержит один передатчик 16 и два магнитных дипольных приемных устройства 18, отделенных в осевом направлении вдоль оси компоновки 14. В этих вариантах реализации, использующих два передатчика 16, передатчики расположены в непараллельных направлениях (ортогональных, например) относительно друг друга для предотвращения мертвых зон, в которых ток не индуцируют на целевую скважину, а по меньшей мере четыре магнитных дипольных приемных устройства расположены вдоль буровой компоновки 14 для осуществления измерений градиента. Для упрощения процесса развязки передатчики могут быть расположены ортогонально относительно друг друга. В следующем описании передатчики приемные и устройства могут быть описаны как ортогонально расположенные относительно друг друга; однако в альтернативных вариантах реализации передатчики/приемные устройства могут быть расположены в других непараллельных ориентациях относительно друг друга. Также, в примере по фиг. 1A и 1B, два отделенных в осевом направлении понижающих приемных устройства 20 расположены рядом с приемными устройствами 18 для устранения прямого сигнала от передатчика 16.
В соответствии со следующим более подробным описанием во время приведенной в качестве примера операции бурения с использованием системы 100 относительного позиционирования, буровую компоновку 14 развертывают в забое скважины для бурения разгрузочной скважины 12 после выброса скважины 10. При приближении разгрузочной скважины 12 к скважине 10 с выбросами, для поддержания разгрузочной скважины 12 на требуемом расстоянии и направлении (т.е., траектории) к скважине 10, система 100 относительного позиционирования активирует передатчик(и) 16 для индуцирования тока вдоль целевой обсадной колонны 11 скважины 10, что приводит в отхождении магнитного поля от целевой обсадной колонны 11. Отделенные в осевом направлении приемные устройства 18 затем считывают магнитное поле и соответствующие измерения градиента. Локальные или удаленные схемы обработки затем используют градиентометрические данные полученного магнитного поля для определения расстояния и направления к скважине 10. После определения относительного положения схемы генерируют сигналы, необходимые для направления буровой компоновки 14 в направлении, требуемом для пересечения или обхода скважины 10.
На фиг. 2 представлена блок-схема схем 200 обработки, использованных в системе относительного позиционирования для осуществления Т-образного пересечения, в соответствии с частными иллюстративными вариантами реализации настоящего изобретения. Центр 24 управления системой управляет технологическими процессами, описанными в настоящем описании. В простом примере, изображенном на фиг. 2, показана система с одним передатчиком. Однако для предотвращения мертвых зон на участках отсутствия индуцированного тока на целевую обсадную колонну 11 блок 16 передатчика может по меньшей мере содержать две катушки в ортогональных направлениях. Совокупность 18 приемных устройств может содержать по меньшей мере четыре рамочные антенны для измерения градиента в двух ортогональных направлениях для определения азимутального угла цели. Однако в других вариантах реализации передатчики/приемные устройства могут быть реализованы, например, в качестве соленоидов, магнетометров или в различных других формах, приближенных к магнитным диполям. Устранение прямого сигнала от передатчика (передатчиков) 16 к приемным устройствам 18 может быть осуществлено с использованием противодействующих катушек 20; в других случаях устранение прямого сигнала может быть осуществлено с использованием альтернативных способов, таких как аналитические вычисления этого эффекта. В этих вариантах реализации, использующих понижающие приемные устройства 20, приемные устройства 18, изображенные на фиг. 2, также содержат данные от понижающих приемных устройств 20.
Блок 26 связи способствует взаимодействию между центром 24 управления системой и передающей катушкой 16 и приемной катушкой 18. Блок визуализации (не показан) может быть присоединен к блоку 26 связи для наблюдения за данными; например, оператор может вмешаться в системные операции на основании этих данных. Центр 24 управления системой также взаимодействует с блоком 28 обработки данных и блоком 30 получения данных. Блок 28 обработки данных может преобразовывать полученные данные в информацию, предоставляя положение и направление цели. Следовательно, результаты могут быть отображены через блок визуализации. Центр 24 управления системой может быть расположен на поверхности или в скважине, причем в этом случае обработанные данные передают на поверхность.
Как указано ранее, буровая компоновка 14 может содержать встроенные схемы в дополнение к необходимым схемам обработки/хранения/связи для осуществления вычислений, описанных в настоящем описании. В частных вариантах реализации эти схемы присоединены с возможностью передачи данных к одному или большему количеству магнитных дипольных передатчиков 16, использованных для образования электромагнитных полей, а также аналогично присоединены к магнитным дипольным приемным устройствам 18 для обработки электромагнитных волн, полученных от целевой скважины. Дополнительно, схемы, встроенные в буровую компоновку 14, могут быть присоединены с возможностью передачи данных через проводное или беспроводное соединение к поверхности для передачи таким образом данных назад к устью скважины и/или к другим компонентам компоновки (для направления части компоновки 14, образующей буровое долото, например). В альтернативном варианте реализации схемы, необходимые для осуществления одного или большего количества аспектов способов, описанных в настоящем описании, могут быть расположены на удаленных от буровой компоновки 14 участках, например, на поверхности или в другом стволе скважины. Например, в частных вариантах реализации передатчик может быть расположен в другой скважине или на поверхности. Эти и другие модификации будут понятны специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием.
Хотя это не показано на фиг. 2, встроенные схемы содержат по меньшей мере один процессор и энергонезависимое читаемое компьютером хранилище, которые соединены друг с другом через системный концентратор. Программные инструкции, выполняемые процессором для осуществления иллюстративных способов относительного позиционирования, описанных в настоящем описании, могут храниться в локальном хранилище или на другом читаемом компьютером носителе. Следует понимать, что программные инструкции позиционирования могут также быть загружены на хранилище из компакта-диска CD-ROM или другого подходящего носителя проводным или беспроводным способами.
Кроме того, специалистам в данной области техники будет понятно, различные аспекты изобретения могут быть реализованы с различными конфигурациями компьютерной системы, включая портативные устройства, микропроцессорные системы, микропроцессорную или программируемую бытовую электронику, миникомпьютеры, суперкомпьютеры и т.п. Настоящее изобретение допускает использование любого количество компьютерных систем и компьютерных сетей. Изобретение может применяться в распределенных вычислительных средах, в которых задачи выполняются удаленными устройствами обработки, связанными в сеть. В распределенной вычислительной среде программные модули могут располагаться как на локальных, так и на удаленных носителях информации, включая внешние запоминающие устройства. Таким образом, настоящее изобретение может использоваться на различных аппаратных средствах и программном обеспечении, или их комбинации, в компьютерной системе или другой системе обработки.
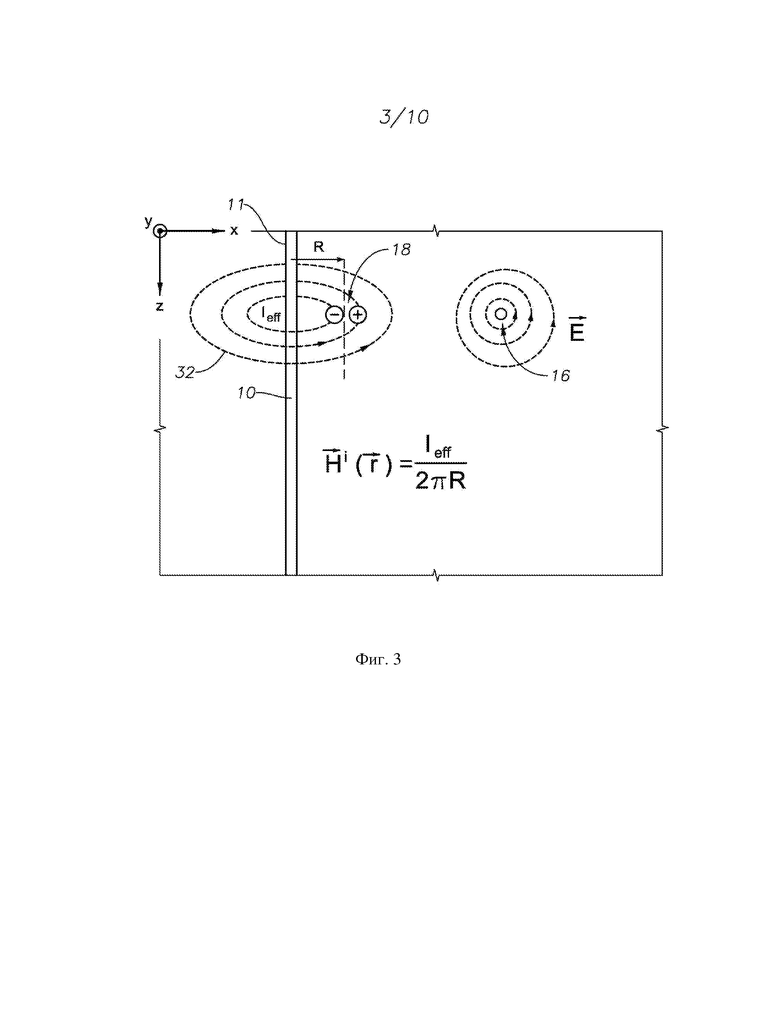
После описания различных вариантов реализации далее будет описан способ, посредством которого определяют относительное позиционирование. На фиг. 3 представлен упрощенный иллюстративный вариант реализации системы относительного позиционирования, которая будет использована для описания способа настоящего изобретения. На этом чертеже разгрузочная скважина 12 и буровая компоновка 14 не показаны для ясности. Однако изображено поперечное сечение однородной формации (за исключением целевой скважины 10, передатчиков 16 и приемных устройств 18) в плоскости x-z. В этом примере передающая катушка 16 с магнитным моментом в направлении y (т.е., катушка, находящаяся в плоскости x-z) образует электрическое поле ( ) вокруг себя. Также показана целевая скважина 10, основная ось которой является направление z. Скважины обычно содержат вытянутые металлические проводящие элементы (такие как стальные обсадные колонны) вокруг них для укрепления скважинной конструкции и предотвращения разрушения стенки скважины. Так как обсадная колонна является лучшим проводником, чем окружающая ее формация, возникает сильное связывание электрического поля к целевой обсадной колонне.
) вокруг себя. Также показана целевая скважина 10, основная ось которой является направление z. Скважины обычно содержат вытянутые металлические проводящие элементы (такие как стальные обсадные колонны) вокруг них для укрепления скважинной конструкции и предотвращения разрушения стенки скважины. Так как обсадная колонна является лучшим проводником, чем окружающая ее формация, возникает сильное связывание электрического поля к целевой обсадной колонне.
Связывание электрического поля образует ток проводимости на целевой обсадной колонне 11, который затем индуцирует магнитное поле 32 вокруг обсадной колонны 11, величина которого может быть выведена через закон Био-Савара. При постоянном индуцированном токе закон Био-Савара сводится к закону Ампера. В практических ситуациях ток, индуцированный на обсадную колонну 11, не является постоянным, но для наших целей мы можем предположить, что поле на точке  выражено:
выражено:
 Уравнение (1),
Уравнение (1),
с небольшой потерей точности, где H выражает магнитное поле, Ieff выражает эффективное значение тока, а R выражает радиальное расстояние от целевой скважины 10 до точки .
Градиент магнитного поля на этом участке  выражен:
выражен:
 Уравнение (2).
Уравнение (2).
Путем возведения коэффициента отношения  к, радиальное расстояние до целевой скважины 10 может быть определено следующим образом:
к, радиальное расстояние до целевой скважины 10 может быть определено следующим образом:
 Уравнение (3).
Уравнение (3).
Далее будет описан иллюстративная конструкция приемных устройства 18. Как описано в настоящем описании, приемные устройства реализованы в виде магнитных диполей, таких как, например, катушки, соленоиды и т.д. В одном варианте реализации использованы рамочные антенны, имеющие магнитный момент в конкретном направлении. В результате, катушки имеют чувствительность только к компоненту магнитного поля в этом направлении. Если направление обозначено u, компонент магнитного поля в указанном направлении может быть выражен как:
 Уравнение (4).
Уравнение (4).
Аналогично, при осевом отделении двух приемных катушек (с одинаковым магнитным моментом) вдоль скважинного оборудования на небольшое расстояние в направлении v, значение их разницы приближается к компоненту градиента магнитного поля в этом направлении. Предположим, что u и v являются двумя из осей в декартовой системе координат, тогда градиент в направлении v может быть выражен следующим образом:
 Уравнение (5).
Уравнение (5).
В декартовой системе координат  и
и  могут быть выражены как:
могут быть выражены как:
 Уравнение (6),
Уравнение (6),
где  выражает азимутальный угол приемного устройства 18 относительно обсадной колонны 11; то есть, угол между выступом измеренного вектора магнитного поля на плоскости x-y системы координат приемного устройства 18 и осью y.
выражает азимутальный угол приемного устройства 18 относительно обсадной колонны 11; то есть, угол между выступом измеренного вектора магнитного поля на плоскости x-y системы координат приемного устройства 18 и осью y.
Если приемные катушки имеют магнитные моменты в направлении y и отделены в осевом направлении в направлении x (или вдоль оси компоновки 14), как показано на фиг. 3, Уравнение 5 может быть выражено как:
 Уравнение (7).
Уравнение (7).
Затем, расстояние к целевой скважине может быть вычислено путем:
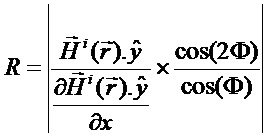 Уравнение (8).
Уравнение (8).
Таким образом, использование частных производных и полей в одном направлении производит азимутальную зависимость в вычислениях дальности. Далее будет описано вычисление угла азимута. Также следует отметить, что в применении с Т-образным пересечением скважины с неуправляемыми выбросами, поворот разгрузочной скважины 12 вокруг целевой скважины 10 в азимутальном направлении не должен изменять результаты вследствие окружной симметрии задачи. Однако позиционирование разгрузочной скважины для Т-образного пересечения изначально требует азимутальной информации. Также, если цель заключается в обходе скважины, определение азимута целевой скважины 10 требуется для определения оптимального пути бурения.
Для применения с обходом или пересечением скважины информации о расстоянии к целевой скважине 10 недостаточно. Также должно быть известно направление к целевой скважине 10. Следовательно, иллюстративные варианты реализации настоящего изобретения также предоставляют различные способы для определения направления. В одном примере использование внешней информации от другого приспособления (приспособление для измерения дальности путем возбуждения электрода, наземное возбуждение, и т.д.) является одной из таких возможностей. В альтернативном варианте реализации магнитное поле 32 на фиг. 3 может быть использовано. При известном градиентном поле от двух ортогональных компонентов в оси, поперечной оси целевой скважины 10 (компоненты x и y при расположении целевой скважины 10 в направлении z), направление целевой скважины 10 может быть определено. Также устранена любая двузначность угла, так как знак градиента обозначает, какая из двух катушек, используемых для определения градиента в этом направлении, расположена ближе к целевой скважине 10. К сожалению, сигнал градиента является слабым, и, в результате, этот способ может приводить к существенным ошибкам в определении угла при слабом сигнале (т.е., на расстоянии от целевой скважины 10 в случае, когда точное определение направления важно для приближения к целевой скважине 10, а не удаления от нее).
В еще одном приведенном в качестве примера способе общее поле может быть использовано. В этом способе угол между компонентами x и y градиентного поля предоставит направление целевой скважины 10. Однако величина этого угла может составлять от 0° до 90°, таким образом обеспечивая существенную неопределенность. Однако если также учитывать компоненты перекрестного соединения в общем поле, этот диапазон может быть увеличен до 0° – 180°. Приведенный в качестве примера вариант осуществления реализован путем:
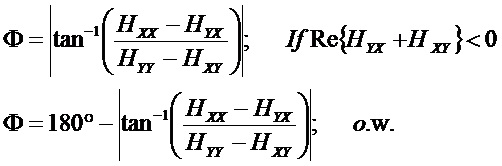 Уравнение (9).
Уравнение (9).
Следует отметить, что значки полей в этом уравнении зависят от конкретного использованного правила. В уравнении 9, Hij выражает поле, измеренное приемным устройством с магнитным моментом в направлении j, соответствующим передатчику в направлении i. Неопределенность 180° может быть устранена посредством использования информации градиента или наблюдения за изменениями во времени вычисленного диапазона. В целом также должна быть доступна некоторая априорная информация о положении цели, и таким образом в большинстве практических случаев эта неопределенность не составляет существенной проблемы.
Как описано ранее, понижающие приемные устройства 20 использованы в частных вариантах реализации для устранения прямого сигнала от передатчиков 16. Понижающие приемные устройства 20 также реализованы в виде магнитных диполей, таких как катушки, соленоиды или магнетометры. Определение расстояния требует измерения магнитного поля, образованного в результате тока, индуцированного на целевую обсадную колонну 11, на точке, как показано в Уравнении 3, аналогично скважине и ее градиенту. Однако приемные устройства 18 также измеряют прямой сигнал, образованный передатчиком 16, усложняя анализ. Для устранения этого прямого сигнала может быть использовано несколько способов. Один иллюстративный пример заключается в аналитическом вычислении поля передатчика 16 на приемных устройствах 18 и вычете этого значения из измерений градиента. Следует отметить, что этот приведенный в качестве примера способ требует наличия информации о свойствах формации, что будет понятно специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием.
Альтернативный иллюстративный способ заключается в использовании понижающих приемных устройств 20, намотанных в противоположном приемным устройствам 18 направлении и расположенных таким образом, чтобы устранять мнимую составляющую прямого сигнала между сочетанием приемного устройства 18 и понижающего приемного устройства 20. Хотя в формациях, отличающихся от воздуха, это устранение подвержено помехам, в большинстве случаев воздействие незначительно.
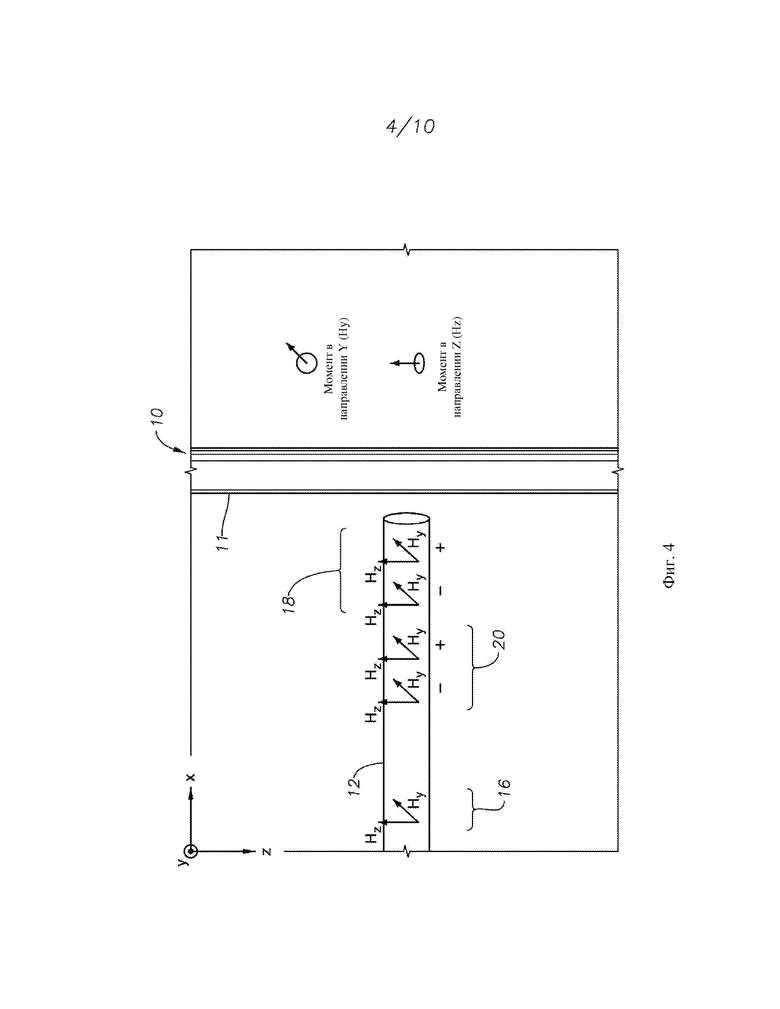
В частных иллюстративных вариантах реализации магнитные моменты передатчиков и приемных устройств занимают геометрический диапазон плоскости, поперечной оси целевой скважины. На фиг. 4 представлен один такой пример, в котором передатчики 16 (пара передатчиков), понижающие приемные устройства 20 (две пары понижающих приемных устройств) и приемные устройства 18 (две пары приемных устройств) имеют магнитные моменты в направлениях y и z. Как изображено на фиг. 3, ось разгрузочной скважины 12 проходит в направлении x, а ось целевой скважины 10 проходит в направлении z. Таким образом, если целью является пересечение скважины, в этом примере, Т-образное пересечение будет осуществлено даже при ориентировании оси целевой скважины 10 в любом направлении в плоскости y-z (т.е., плоскости, поперечной оси разгрузочной скважины). Таким образом, в одном приведенном в качестве примера варианте реализации конструкция системы, учитывающая такие возможности, содержит передатчики и приемные устройства, магнитные моменты которых занимают геометрический диапазон поперечной плоскости. Соответственно, передатчики 16 и приемные устройства 18 с магнитными моментами в направлениях y и z могут быть использованы с этой целью, как показано на фиг. 4.
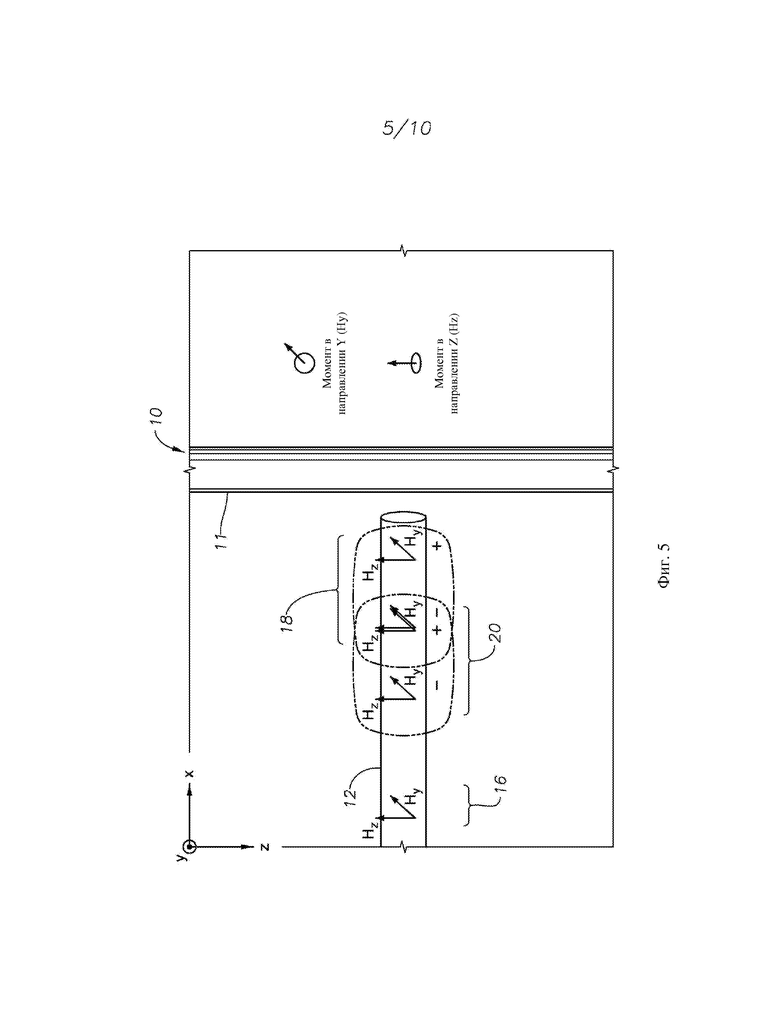
На фиг. 5 представлена еще одна упрощенная иллюстрация варианта реализации настоящего изобретения, в котором одна из пар понижающих приемных устройств использована в вычислении градиента. Такой вариант реализации обеспечивает возможность уменьшения количества используемых приемных устройств. На фиг. 6A-B представлен альтернативный вариант реализации, подобный варианту реализации по фиг. 4 и 5. В идеальных условиях система должна обнаруживать целевую скважину в любом произвольно выбранном направлении и быть выполнена с возможностью обхода или пересечения ее. Это может быть обеспечено посредством наличия передатчиков с магнитными моментами в двух различных направлениях и измерения общего градиента, которое требует измерений градиента по меньшей мере в трех направлениях для охвата всей плоскости. Пример этой системы изображен на фиг. 6A. В этом примере y и z выбраны направлениями магнитного момента. В этом частном варианте реализации симметричная по окружности группа (вокруг оси x в плоскости y-z) из четырех пар диполей использована в каждой совокупности 18, 20 основных/понижающих приемных устройств для измерения градиентов в направлениях y и z. Для измерения градиента в направлении x содержатся две таких совокупности для совокупностей 18, 20 основных и понижающих приемных устройств. Альтернативно, могут быть разработаны другие варианты реализации, обеспечивающие возможность измерения градиента магнитного поля в трех ортогональных пространственных направлениях, что будет понятно специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием. Например, в вычислении градиента могут быть использованы противодействующие катушки, как показано на фиг. 6B.
Для иллюстрации этих эффектов обратимся к примеру, изображенному на фиг. 7. Для иллюстрации использования предлагаемой системы в применении с Т-образным пересечением, предложена модель иллюстративного случая, в котором расстояние от целевой скважины 10 вычисляют во время перемещения разгрузочной скважины 12 по направлению к пересечению. Геометрия моделирования изображена на фиг. 7. Для ясности моделирован вариант реализации с одним передатчиком 16, и предположено, что азимутальный угол цели известен. В этой модели, выбранная рабочая частота составляет 10 Гц; формация является однородной с сопротивлением, составляющим Rf = 20 Ω-м, относительной диэлектрической проницаемостью, составляющей 4, и коэффициентом проницаемости, составляющим 11. Целевая скважина 10 содержит проводящую обсадную колонну 11, радиус которой составляет 4 дюйма (10,16 см). Расстояние от передатчика 16 к центру совокупности 18 основных приемных устройств составляет 1 фут (30,48 см). Совокупность 20 понижающих приемных устройств расположена на 1 фут (30,48 см) от совокупности основных приемных устройств. Расстояние между обоими парами основных и понижающих приемных градиент устройств составляет 8 дюймов (20,32 см).
На фиг. 8 представлены результаты моделирования системы по фиг. 7. Расстояние к целевой скважине 10 является расстоянием от центра совокупности 16 основных приемных устройств ближней точке на целевой скважине 10. Линия A является эталоном, отображающим эталонные результаты, в которых вычисленное расстояние равно действительному расстоянию. Линия B отображает результаты, вычисленные с использованием аналитического вычисления прямого сигнала. Линия C отображает механическое устранение прямого сигнала с использованием понижающих приемных устройств. Как показано, использование понижающих приемных устройств приводит к незначительно худшим результатам, так как они настроены для абсолютного устранения прямого сигнала в воздухе. Однако результаты в обоих случаях являются положительными с практически точными результатами, когда расстояние цели к приемным устройствам составляет менее 30 футов (914,4 см). Даже при расстоянии, составляющем 70 футов (2133,6 см), ошибка составляет приблизительно 20% при использовании понижающих приемных устройств и приблизительно 3% при использовании аналитического устранения прямого сигнала.
На фиг. 9 представлены результаты при повторении одного моделирования с сопротивляемостью формации, уменьшенной до 1 Ω-м. Этот случай моделирует производительность системы относительного позиционирования в более проводящей среде и предлагает более тяжелую для вычисления расстояния окружающую среду. Результаты остаются положительными до расстояния, составляющего приблизительно 25 футов (762 см) от целевой скважины. Для больших расстояний, результаты при использовании понижающих приемных устройств становятся существенно нелинейными. Однако аналитическое устранение прямого сигнала обеспечивает удовлетворительные результаты даже на расстоянии, составляющем 70 футов (2133,6 см).
После описания различных вариантов реализации далее будет описан способ, посредством которого достигаются пересечения и/или обход. Как описано ранее, иллюстративные системы относительного позиционирования в целом содержат варианты реализации магнитных диполей (передатчики и приемные устройства), расположенные для индуцирования и измерения магнитных полей градиентов, отходящих от целевого ствола скважины. На фиг. 10 представлена блок схема способа 1100 измерения дальности, используемого системой относительного позиционирования, использующей градиентометрические данные для определения расстояния между первым (т.е., целевым) и вторым стволом скважины в соответствии с частными иллюстративными способами настоящего изобретения. Аналогично, частное применение может заключаться, например, в бурении разгрузочной скважины в случае выброса.
Однако на блоке 1002 первый ствол скважины пробуривают с использованием любого подходящего способа. Первый ствол скважины характеризуется более высокой проводимостью, чем окружающая формация, что, например, может быть обеспечено путем обсаживания первого ствола скважины или путем использования некоторого другого вытянутого компонента, расположенного вдоль первого ствола скважины. На блоке 1004 по меньшей мере два магнитных дипольных передатчика и по меньшей мере четыре магнитных дипольных приемных устройства развернуты во второй разгрузочной скважине вдоль буровой компоновки, причем второй ствол скважины ориентирован вдоль оси, пересекающей первый ствол скважины. Это может произойти, например, после выброса из первого ствола скважины. Передатчики и приемные устройства могут быть развернуты во втором стволе скважины различными способами, включая, например, вдоль буровой компоновки.
На блоке 1006 обеспечивается возбуждение передатчиков для индуцирования тока таким образом вдоль первого ствола скважины, что приводит к излучению магнитного поля от первого ствола скважины. На блоке 1008 магнитное поле затем принимают посредством приемных устройств. На блоке 1010 с использованием схем обработки, функционально присоединенным к приемным устройствам, система относительного позиционирования использует градиентометрические данные полученного магнитного поля для определения расстояния между первым и вторым стволами скважины. Здесь система относительного позиционирования определяет, какие действия, при наличии, необходимы для поддержания или исправления требуемого пути бурения для пересечения и/или обхода первого ствола скважины. Такие действия могут быть, например, изменением в направлении, скорости, массе на долото и т.д. Затем, алгоритм возвращается к блоку 1006, на котором он продолжает возбуждать передатчики для непрерывного наблюдения и/или регулирования пути бурения при необходимости.
Как описано ранее в альтернативном применении система относительного позиционирования и способы настоящего изобретения также применимы в операциях обхода скважины. В таком применении наличие целевой скважины необязательно. Однако в одном иллюстративном способе система относительного позиционирования развернута вдоль буровой компоновки. Во время бурения встроенные (или удаленные) в систему схемы обработки активно ищут другие скважины или вытянутые проводящие конструкции с использованием различных компонентов и элементов градиентометрического анализа, описанных в настоящем описании. При обнаружении таких скважин или конструкций система позиционирования оповещает о тревоге на пути бурения, соответственно.
Соответственно, варианты реализации настоящего изобретения, описанные в настоящем описании, используют магнитные дипольные передатчики/приемные устройства для анализа измерений градиентов для определения таким образом пути ствола скважины, необходимого для пересечения и/или обхода другого ствола скважины, без необходимости наличия информации о свойствах формации и цели. Следовательно, раскрытая система обеспечивает возможность точного и правильного применения в Т-образном пересечении через широкодоступные магнитные дипольные приемные устройства/передатчики. Такая система имеет важные применения в действительных условиях, в частности в ситуациях осуществления направленного бурения в густорасположенном нефтяном месторождении и необходимости обхода существующих скважин. Она также применима в случае необходимости пересечения скважины с выбросами разгрузочной скважиной. Способы для устранения прямого сигнала между передающей и приемной катушками также были раскрыты для способствования практической реализации этого приспособления.
Варианты реализации и способы, описанные в настоящем описании, также относятся к любому одному или большему количеству следующих параграфов:
1. Способ измерения дальности забоя скважины, содержащий бурение первого ствола скважины, который содержит вытянутый проводящий элемент; развертывание по меньшей мере двух магнитных дипольных передатчиков и по меньшей мере четырех магнитных дипольных приемных устройств во втором стволе скважины; индуцирование тока вдоль первого ствола скважины с использованием передатчиков, что приводит к излучению магнитного поля от первого ствола скважины; получение магнитного поля с использованием приемных устройств, причем измеряют градиентное поле; и использование градиентного поля для определения расстояния между первым и вторым стволами скважины.
2. Способ в соответствии с параграфом 1, в котором градиентное поле измеряют в осевом направлении вдоль второго ствола скважины.
3. Способ в соответствии с параграфом 1 или 2, в котором градиентное поле измеряют по меньшей мере в трех направлениях.
4. Способ в соответствии с любым из параграфов 1–3, дополнительно содержащий определение направления первого ствола скважины относительно второго ствола скважины, причем определение направления дополнительно содержит определение общего поля полученного магнитного поля; определение угла между компонентами x и y общего поля; и использование угла для определения направления.
5. Способ в соответствии с любым из параграфов 1–4, дополнительно содержащий использование градиентного поля полученного магнитного поля для определения таким образом направления первого ствола скважины относительно второго ствола скважины.
6. Способ в соответствии с любым из параграфов 1–5, в котором определение направления дополнительно содержит определение угла между двумя ортогональными компонентами градиентного поля, причем ортогональные компоненты расположены вдоль оси, поперечной оси первого ствола скважины; и использование угла для определения направления.
7. Способ в соответствии с любым из параграфов 1–6, в котором определение расстояния между первым и вторым стволами скважины дополнительно содержит устранение прямого сигнала, отходящего от передатчиков.
8. Способ в соответствии с любым из параграфов 1–7, в котором устранение прямого сигнала содержит вычисление магнитного поля передатчиков на приемных устройствах; и вычитание вычисленного магнитного поля из полученного магнитного поля.
9. Способ в соответствии с любым из параграфов 1–8, в котором устранение прямого сигнала содержит использование двух пар понижающих приемных устройств для устранения мнимого компонента прямого сигнала.
10. Способ в соответствии с любым из параграфов 1–9, дополнительно содержащий использование пары понижающих приемных устройств для анализа градиентометрических данных.
11. Способ в соответствии с любым из параграфов 1-10, в котором первый ствол скважины является скважиной с выбросами; а второй ствол скважины является пересекающей скважиной, причем способ используют для остановки выброса углеводорода из скважины с выбросами.
12. Способ в соответствии с любым из параграфов 1–11, дополнительно содержащий обход целевой скважины на основании определенного расстояния и направления.
13. Способ в соответствии с любым из параграфов 1–12, в котором передатчики и приемные устройства развернуты вдоль буровой компоновки, каротажного оборудования или оборудования проводной линии.
14. Способ в соответствии с любым из параграфов 1–13, дополнительно содержащий направление буровой компоновки, развернутой вдоль второго ствола скважины, с использованием определенного направления и расстояния между первым и вторым стволами скважины.
15. Устройство для измерения дальности забоя скважины, содержащее низ бурильной колонны, содержащий по меньшей мере два магнитных дипольных передатчика и по меньшей мере четыре магнитных дипольных приемных устройства; и схемы обработки для реализации способа, содержащего индуцирование тока вдоль первого ствола скважины с использованием передатчиков, что приводит к излучению магнитного поля от первого ствола скважины и в направлении второго ствола скважины, причем первый ствол скважины содержит вытянутый проводящий элемент; получение магнитного поля с использованием приемных устройств, причем измеряют градиентное поле; и использование градиентного поля для определения расстояния между первым и вторым стволами скважины.
16. Устройство измерения дальности забоя скважины в соответствии с параграфом 15, в котором приемные устройства отделены в осевом направлении в направлении, параллельном оси низа бурильной колонны таким образом, чтобы измерять градиентное поле в осевом направлении вдоль низа бурильной колонны.
17. Устройство измерения дальности забоя скважины в соответствии с параграфами 15 или 16, дополнительно содержащее четыре понижающих приемных устройства, расположенных вдоль низа бурильной колонны между передатчиками и приемными устройствами.
18. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–17, в котором понижающие приемные устройства имеют поляризацию, противоположную относительно приемных устройств.
19. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–18, в котором низ бурильной колонны является буровой компоновкой, оборудованием проводной линии или каротажным оборудованием.
20. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–19, в котором передатчики расположены непараллельно относительно друг друга вдоль низа бурильной колонны; причем приемные устройства отделены в осевом направлении в направлении, параллельном оси низа бурильной колонны; а магнитный момент приемных устройств ориентирован в направлении, поперечном оси низа бурильной колонны.
21. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–20, в котором магнитные моменты приемных устройств занимают плоскость, поперечную оси первого ствола скважины.
22. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–21, в котором передатчики и приемные устройства содержат по меньшей мере один компонент из числа катушки, соленоида или магнетометра.
23. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–22, в котором два из приемных устройств являются понижающими приемными устройствами, расположенными между передатчиками и другими приемными устройствами.
24. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–23, в котором понижающие приемные устройства используют для измерения градиентного поля.
25. Устройство измерения дальности забоя скважины в соответствии с любым из параграфов 15–24, в котором по меньшей мере четыре приемных устройства содержат две совокупности приемных устройств, содержащих четыре магнитных диполя, причем совокупности приемных устройств симметрично расположены вдоль оси низа бурильной колонны; причем устройство измерения дальности забоя скважины дополнительно содержит две совокупности понижающих приемных устройств, содержащих четыре пары магнитных моментов, причем совокупности понижающих приемных устройств расположены симметрично вокруг оси низа бурильной колонны между передатчиками и приемными устройствами.
Кроме того, способы, описанные в настоящем описании, могут быть осуществлены в системе, содержащей схемы обработки для осуществления любого из способов, или в программном компьютерном продукте, содержащем инструкции, которые при выполнении по меньшей мере одним процессором, обеспечивают выполнение процессором любого из способов, описанных в настоящем описании.
Несмотря на то, что были изображены и описаны различные варианты реализации и способы, настоящее изобретение не ограничено этими вариантами реализации и способами, и включает все модификации и изменения, понятные специалисту в данной области техники. Следовательно, следует понимать, что настоящее изобретение не ограничено частными описанными формами. Наоборот, оно включает все модификации, эквиваленты и альтернативы, находящиеся в пределах объема и сущности настоящего изобретения, определенного прилагаемой формулой изобретения.
Изобретение относится к бурению направленных скважин и может быть применено для бурения пересекающихся скважин. Техническим результатом является повышение точности определения расположения скважины относительно цели. В частности, предложен способ измерения дальности забоя скважины, содержащий: бурение первого ствола скважины, который содержит вытянутый проводящий элемент; развертывание по меньшей мере двух магнитных дипольных передатчиков и по меньшей мере четырех магнитных дипольных приемных устройств во втором стволе скважины; причем дипольные приемные устройства содержат: два основных приемных устройства и два понижающих приемных устройства, использование указанных понижающих приемных устройств для устранения прямого сигнала, излученного от указанных передатчиков; индуцирование тока вдоль первого ствола скважины с использованием передатчиков, что приводит к излучению магнитного поля от первого ствола скважины; получение магнитного поля с использованием основных и понижающих приемных устройств, причем измеряют градиентное поле; и использование градиентного поля для определения расстояния между первым и вторым стволами скважины. 3 н. и 19 з.п. ф-лы, 10 ил.
1. Способ измерения дальности забоя скважины, содержащий:
бурение первого ствола скважины, который содержит вытянутый проводящий элемент;
развертывание по меньшей мере двух магнитных дипольных передатчиков и по меньшей мере четырех магнитных дипольных приемных устройств во втором стволе скважины; причем дипольные приемные устройства содержат:
два основных приемных устройства и
два понижающих приемных устройства,
использование указанных понижающих приемных устройств для устранения прямого сигнала, излученного от указанных передатчиков;
индуцирование тока вдоль первого ствола скважины с использованием передатчиков, что приводит к излучению магнитного поля от первого ствола скважины;
получение магнитного поля с использованием основных и понижающих приемных устройств, причем измеряют градиентное поле; и
использование градиентного поля для определения расстояния между первым и вторым стволами скважины.
2. Способ по п. 1, в котором градиентное поле измеряют в осевом направлении вдоль второго ствола скважины.
3. Способ по п. 1, в котором градиентное поле измеряют по меньшей мере в трех направлениях.
4. Способ по п. 1, дополнительно содержащий определение направления первого ствола скважины относительно второго ствола скважины, причем определение направления дополнительно содержит:
определение общего поля полученного магнитного поля;
определение угла между компонентами x и y общего поля; и
использование угла для определения направления.
5. Способ по п. 1, дополнительно содержащий использование градиентного поля полученного магнитного поля для определения таким образом направления первого ствола скважины относительно второго ствола скважины.
6. Способ по п. 5, в котором определение направления дополнительно содержит:
определение угла между двумя ортогональными компонентами градиентного поля, причем ортогональные компоненты расположены вдоль оси, поперечной по отношению к оси первого ствола скважины; и
использование указанного угла для определения направления.
7. Способ по п. 1, в котором устранение прямого сигнала содержит:
вычисление магнитного поля передатчиков на приемных устройствах; и
вычитание вычисленного магнитного поля из полученного магнитного поля.
8. Способ по п. 1, в котором устранение прямого сигнала содержит использование двух пар понижающих приемных устройств для устранения мнимого компонента прямого сигнала.
9. Способ по п. 1, в котором:
первый ствол скважины является скважиной с выбросами; а
второй ствол скважины является пересекающей скважиной, причем указанный способ используют для остановки выброса углеводорода из скважины с выбросами.
10. Способ по п. 4, дополнительно содержащий обход целевой скважины на основании определенного расстояния и направления.
11. Способ по п. 1, в котором передатчики и приемные устройства развернуты вдоль буровой компоновки, каротажного оборудования или оборудования проводной линии.
12. Способ по п. 4, дополнительно включающий управление буровой компоновкой, развернутой вдоль второго ствола скважины, с использованием определенного направления и расстояния между первым и вторым стволами скважины.
13. Система измерения дальности забоя скважины, содержащая схемы обработки для реализации любого из способов по пп. 1-12.
14. Устройство для измерения дальности забоя скважины, содержащее:
низ бурильной колонны, содержащий по меньшей мере два магнитных дипольных передатчика и по меньшей мере четыре магнитных дипольных приемных устройства; причем дипольные приемные устройства содержат два основных приемных устройства и два понижающих приемных устройства, и
схемы обработки для реализации способа, содержащего:
индуцирование тока вдоль первого ствола скважины с использованием передатчиков, что приводит к излучению магнитного поля от первого ствола скважины и в направлении второго ствола скважины, причем первый ствол скважины содержит вытянутый проводящий элемент;
использование указанных понижающих приемных устройств для устранения прямого сигнала, излученного от указанных передатчиков;
получение магнитного поля с использованием основных и понижающих приемных устройств, причем измеряют градиентное поле; и
использование градиентного поля для определения расстояния между первым и вторым стволами скважины.
15. Устройство измерения дальности забоя скважины по п. 14, в котором приемные устройства отделены в осевом направлении в направлении, параллельном оси низа бурильной колонны таким образом, чтобы измерять градиентное поле в осевом направлении вдоль низа бурильной колонны.
16. Устройство измерения дальности забоя скважины по п. 14, дополнительно содержащее четыре понижающих приемных устройства, расположенных вдоль низа бурильной колонны между передатчиками и приемными устройствами.
17. Устройство измерения дальности забоя скважины по п. 14, в котором понижающие приемные устройства имеют поляризацию, противоположную относительно приемных устройств.
18. Устройство измерения дальности забоя скважины по п. 14, в котором низ бурильной колонны является буровой компоновкой, оборудованием проводной линии или каротажным оборудованием.
19. Устройство измерения дальности забоя скважины по п. 14, в котором:
передатчики расположены непараллельно относительно друг друга вдоль низа бурильной колонны;
приемные устройства отделены в осевом направлении в направлении, параллельном оси низа бурильной колонны; и
магнитный момент приемных устройств ориентирован в направлении, поперечном оси низа бурильной колонны.
20. Устройство измерения дальности забоя скважины по п. 14, в котором магнитные моменты приемных устройств занимают плоскость, поперечную оси первого ствола скважины.
21. Устройство измерения дальности забоя скважины по п. 14, в котором передатчики и приемные устройства содержат по меньшей мере один компонент из числа катушки, соленоида или магнетометра.
22. Устройство измерения дальности забоя скважины по п. 14, в котором:
по меньшей мере четыре приемных устройства содержат две совокупности приемных устройств, содержащих четыре магнитных диполя, причем совокупности приемных устройств симметрично расположены вдоль оси низа бурильной колонны; причем
устройство измерения дальности забоя скважины дополнительно содержит две совокупности понижающих приемных устройств, содержащих четыре пары магнитных моментов, причем совокупности понижающих приемных устройств расположены симметрично вокруг оси низа бурильной колонны между передатчиками и приемными устройствами.
| US 4933640 A, 12.06.1990 | |||
| СПОСОБ НАВЕДЕНИЯ ЗАБОЯ ОДНОЙ СКВАЖИНЫ НА СТВОЛ ДРУГОЙ СКВАЖИНЫ | 1989 |
|
SU1626908A1 |
| СИСТЕМА КОНТРОЛЯ ПРОЦЕССА ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СТВОЛОВ ПРИ КУСТОВОМ БУРЕНИИ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2009 |
|
RU2405106C1 |
| US 5230387 A, 27.07.1993 | |||
| US 6509738 B1, 21.01.2003 | |||
| US 4791373 A, 13.12.1988 | |||
| US 4372398 A, 08.02.1983 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481506C1 |
| US 4072200 A, 07.02.1978. | |||

