Изобретение относится к бортовым вычислительным системам, может быть использовано для построения высоконадежных отказоустойчивых комплексных систем управления (КСУ) полетом летательных аппаратов (ЛА) и входящих в их состав систем дистанционного управления (СДУ) и систем автоматического управления (САУ) ЛА.
Использование КСУ позволяет значительно упростить конструкцию, летную и техническую эксплуатацию системы управления ЛА, а также ее связи с другими системами бортового оборудования. Использование КСУ дает возможность применения более гибких законов управления, обеспечивающих качественно и количественно существенно более высокие характеристики устойчивости, управляемости и маневренности ЛА на всех режимах полета.
В основу предлагаемых способа и устройства положено многократное резервирование каналов информационного обмена, датчиков, вычислителей, средств контроля и исполнительных механизмов. Управление аппаратной и вычислительной избыточностью осуществляется в зависимости от состояния системы программно-алгоритмически и аппаратно. Отметим, что в системах с резервированными вычислителями используются схемы соединения двуады и триады вычислителей. Двуада - это группа из двух соединенных между собой каналами межмашинного обмена (ММО) вычислителей, триада - это группа из трех вычислителей, соединенных между собой каналами ММО.
Известны способ формирования отказоустойчивой вычислительной системы и отказоустойчивая вычислительная система, патент РФ №2439674, МПК 7 G06F 15/16, опубл. 10.01.2012 г., бюл. №1, принятые нами в качестве прототипов.
Согласно известному способу формируют отказоустойчивую вычислительную систему, содержащую N центральных процессоров и N процессоров ввода-вывода в симметричной конфигурации соединения, которые определяют состояние соответствующего средства обработки каналов и обеспечивают передачу его состояния другому средству обработки, определяют запрос на выполнение задания средствами обработки между собой, позволяющий любому одному средству обработки по какому-либо заранее выбранному критерию или по их совокупности выполнять функцию ведущего средства обработки в симметричной конфигурации для текущего управления периферийными и исполнительными устройствами, входы всех средств обработки подсоединяют к общему источнику входных данных, все средства обработки, имеющие идентичные образы памяти программ, синхронно выполняют запрос на задание, а результаты выполнения передают по каналам связи между всеми средствами обработки, в каждом из которых собственные результаты программно сравнивают с результатами остальных по мажоритарному принципу, восстанавливают достоверное значение результата, которое рассылают всем средствам обработки, так что ошибку сбившегося средства обработки парируют в нем достоверным значением, а при следующих подряд повторениях идентичной ошибки неисправное средство обработки переводят в резерв или отключают.
Недостатком известного изобретения является необходимость выделения ведущего средства обработки в симметричной конфигурации, необходимость применения двух вычислительных устройств в каждом канале, при этом система контроля и диагностики по мажоранте и конфигуратор используются только по числу каналов. Предложенный способ формирования применим в основном для контроля внутренних процессорных модулей, он не охватывает всю систему управления и не учитывает особенности организации КСУ ЛА.
Целью заявляемого изобретения является повышение надежности, живучести, отказобезопасности и универсальности использования комплексной системы управления путем реконфигурации структуры вычислительно-управляющего оборудования КСУ ЛА.
Указанная цель достигается тем, что согласно предлагаемому способу формирования отказоустойчивой комплексной системы управления (КСУ), при котором вычислительные операции выполняют с резервированным процессорным определением локальных сигналов управления, в зависимости от сигналов сенсоров, вводимых летчиком команд, передают данные по разветвленной сети линий передачи данных, осуществляют согласование управляющих сигналов и направляют их к исполнительным механизмам, в процессе функционирования непрерывно осуществляют контроль работы с целью выявления отказавших элементов и исключения их из структуры вычислительной системы, дополнительно объединяют вычислительные средства КСУ в распределенную вычислительную сеть, содержащую реконфигурируемое ядро КСУ, обеспечивающую реализацию всего множества предписанных КСУ ЛА функций в различных режимах применения на основе дистанционного управления исполнительными механизмами, посредством которого осуществляют управление ЛА с одного или с двух постов управления летчика, в зависимости от типа ЛА, через встроенные в посты управления резервированные датчики положения ручки (ДПР) управления с выполнением вычислительных операций и с согласованием входных данных и вычисленных управляющих сигналов в резервированных вычислителях управления СДУ (ВУ СДУ), посредством обмена данными между резервами ВУ СДУ по линиям связи, с последующей передачей вычисленных сигналов управления по разветвленной сети линий передачи данных к исполнительным механизмам приводов с индивидуальными и резервированными для исполнительных механизмов и соответствующими им цифровыми блоками управления приводов (БУП), причем отказоустойчивость системе обеспечивают программно-алгоритмические модули кворумирования и реконфигурации (МКР) в каждом резерве вычислителей каждого канала входного и выходного сечения сигналов управления, датчиков и исполнительных механизмов, работающие по мажоритарной логике, которые осуществляют проверку исправности резервированных каналов управления, датчиков, резервов вычислителей и исполнительных механизмов путем определения разности сигналов резервов вычислителей одного сечения каждого канала между собой, посредством вычисления и сравнения разностей сигналов с назначенным порогом, что позволяет определить неисправный канал управления, датчик, модуль вычислителя и исполнительного механизма, после чего осуществляют автоматическую реконфигурацию структуры КСУ, при этом для функционирования КСУ ЛА предусматривают три режима работы - основной режим, упрощенный (альтернативный) режим и аварийный (резервный) режим, по результатам проверки исправности КСУ автоматически производят реконфигурацию структуры блоков вычисления и управления и распределенной вычислительной сети КСУ и выбирают один из трех режимов управления с выдачей сигнала на индикатор режимов работы КСУ ЛА, если все вычислители всех сечений каналов управления системы исправны и в КСУ поступает вся необходимая информация из КБО, то КСУ работает в основном режиме с максимальной функциональной конфигурацией, в котором задействованы все основные функциональные элементы КСУ и комплекса бортового оборудования (КБО), при отказах во взаимодействующих системах КБО, либо при нарушении связей с КБО, либо при числе вычислителей в каждом контрольном сечении не менее 3-х или при возникновении более 2-х последовательных отказов в разноименных контрольных сечениях вычислительного тракта любого из каналов управления происходит автоматическое архитектурное преобразование (реконфигурация) блоков системы и переход к альтернативному (упрощенному) режиму управления, при котором задействованы все функциональные компоненты КСУ без взаимодействия с КБО, в этом случае возможно продолжение полета в ситуации не хуже усложнения условий полета, используют режимы демпфирования и стабилизации крена и тангажа по сигналам интегрального блока датчиков (ИБД) в помощь летчику, для ручного управления углы крена и тангажа вычисляют в блоке резервной навигации (БРН) с адаптивной коррекцией от акселерометров в вычислителе ручного управления ВУ СДУ, после второго отказа резервированных каналов управления, датчиков, резервов вычислителей и исполнительных механизмов в каком-либо одном контрольном сечении тракта формирования и передачи сигналов в любом из каналов управления на уровне СДУ, КСУ автоматически переходит в резервный (аварийный) режим управления, в котором сохраняются только напрямую передаваемые к приводам сигналы с рычагов управления ЛА летчиком, в каждом из режимов вычисляют управляющие, предупреждающие (информирующие) сигналы и ограничительные сигналы в соответствии с логикой и алгоритмами управления в выбранном режиме, получают и обрабатывают сигналы обратной связи от исполнительных приводов после отработки команд управления.
Для беспилотных ЛА (БЛА) в качестве управляющих сигналов используют радиосигналы от наземного пункта управления, соответствующие параметрам полета ЛА, обработку которых осуществляют посредством вычислительных средств КСУ.
Для повышения живучести КСУ, три или более резервов вычислителей системы разделяют на шкафы-крейты, которые пространственно рассредоточивают на борту ЛА, причем, в зависимости от типа и особенностей ЛА, используют соответствующую конфигурацию схемы соединения ВУ СДУ основного режима работы КСУ.
Для формирования отказоустойчивой КСУ возможны следующие варианты включения резервов вычислителей СДУ:
ВУ СДУ включают по схеме две триады, где каждый вычислитель триады соединен каналами ММО с одним вычислителем второй триады, не соединенным другим вычислителем первой триады, разнесенные на два шкафа-крейта по левому и правому борту ЛА.
ВУ СДУ включают по схеме три двуады, это группа из трех двуад вычислителей, в которой каждый из вычислителей двуады соединен каналом ММО с одним вычислителем другой двуады, не соединенным с вычислителем его пары, разнесенные на три шкафа-крейта по левому, правому борту и в центральной части ЛА.
ВУ СДУ включают по схеме три двуады резервов вычислителей, объединенных по полносвязной схеме, где каждый вычислитель двуады соединен каналом ММО со всеми другими вычислителями своей и других двуад.
ВУ СДУ включают по схеме одна двуада и одна триада резервов вычислителей, где каждый вычислитель соединен каналами ММО со всеми другими вычислителями двуады и триады, разделенных на шкафы-крейты, разнесенные по правому и левому борту ЛА.
ВУ СДУ включают по схеме две двуады резервов вычислителей, где каждый вычислитель соединен каналами ММО со всеми другими вычислителями двуад по полносвязной схеме, разделенных на шкафы-крейты, разнесенные по правому и левому борту ЛА.
ВУ СДУ включают по схеме, в которой каждому из трех и более вычислителей резервов, объединенных по сокращенной либо по полносвязной схеме, выделяют свой шкаф-крейт и разносят их по борту ЛА.
Заявленный способ может быть реализован с помощью отказоустойчивой КСУ, содержащей в каждом канале управления органы управления, кинематически связанные с датчиками ДПР, электрически связанными с резервированными вычислительными устройствами, которые связаны с КБО и оконечными исполнительными устройствами, выходы которых подключены к указанным вычислителям, резервированные внутренние и внешние шины информационного обмена, мажоритарные элементы и реконфигураторы вычислительных устройств по количеству резервных каналов, которая дополнительно содержит на каждом посту управления летчика четырехкратно резервированные в каждом канале управления ДПР, пульт управления (ПУ), двухкратно и более кратно резервированную вычислительную систему САУ (ВС САУ), четырехкратно и более кратно резервированное ВУ СДУ, трех- или четырехкратно резервированный ИБД, трех или четырехкратно резервированный блок БРН, группу из четырехкратно резервированных БУП, количество групп БУП определяется количеством рулевых аэродинамических поверхностей и их секций, трех-, четырех- или более кратно резервированные программно-алгоритмические МКР сигналов управления, датчиков, резервов вычислителей и исполнительных механизмов входного и выходного сечения по мажоритарной логике, четырехкратно резервированные в каждом канале (крена, тангажа и рыскания) ДПР постов управления летчика подключены к входам трех-, четырехкратно и более кратно резервированных ВУ СДУ, которые соединены между собой и с ВС САУ и соединены с выходами ИБД и БРН, соответственно входы резервированных БУП соединены с соответствующими выходами ВУ СДУ, а выходы БУП подключены к входам соответствующих электромеханических или электрогидравлических приводов, трех- или четырехкратно резервированные БРН соединены с соответствующими выходами резервированного ИБД, входы ВС САУ соединены с выходами КБО и ПУ, в зависимости от требований к КСУ, используемых на различных типах ЛА.
При использовании данной отказоустойчивой КСУ на беспилотных летательных аппаратах она содержит приемник радиосигналов от наземного пункта управления, соответствующих параметрам полета ЛА, обработку которых осуществляют посредством вычислительных средств КСУ.
С целью повышения живучести КСУ содержит три или более резервов ВУ СДУ, размещенных в шкафах-крейтах, которые пространственно рассредоточены на борту ЛА и соединены по соответствующей схеме.
При этом для заявляемой отказоустойчивой КСУ предусмотрены следующие варианты схем включения резервов ВУ СДУ.
Система содержит функциональные модули ВУ СДУ, шестикратно резервированные и соединенные по схеме две «триады», размещенные в двух шкафах-крейтах, разнесенных по левому и правому бортам ЛА и объединенных каналами ММО.
Система содержит функциональные модули ВУ СДУ, шестикратно резервированные и соединенные по схеме три «двуады», размещенные в трех шкафах-крейтах по левому, правому борту и в центральной части ЛА, объединенных каналами ММО.
Система содержит функциональные модули ВУ СДУ, соединенные по схеме три «двуады» резервов вычислителей и объединенные по полносвязной схеме.
Система содержит функциональные модули ВУ СДУ, соединенные по схеме одна «двуада» и одна «триада», размещенные в шкафах-крейтах, разнесенных по правому и левому борту ЛА и объединенных каналами ММО.
Система содержит функциональные модули ВУ СДУ, соединенные по схеме две «двуады», объединенные по полносвязной схеме.
Система содержит функциональные модули ВУ СДУ, соединенные по схеме, в которой каждый из трех и более резервов вычислителей объединены по каналам ММО либо по полносвязной схеме и размещены в отдельных шкафах-крейтах, разнесенных по борту ЛА.
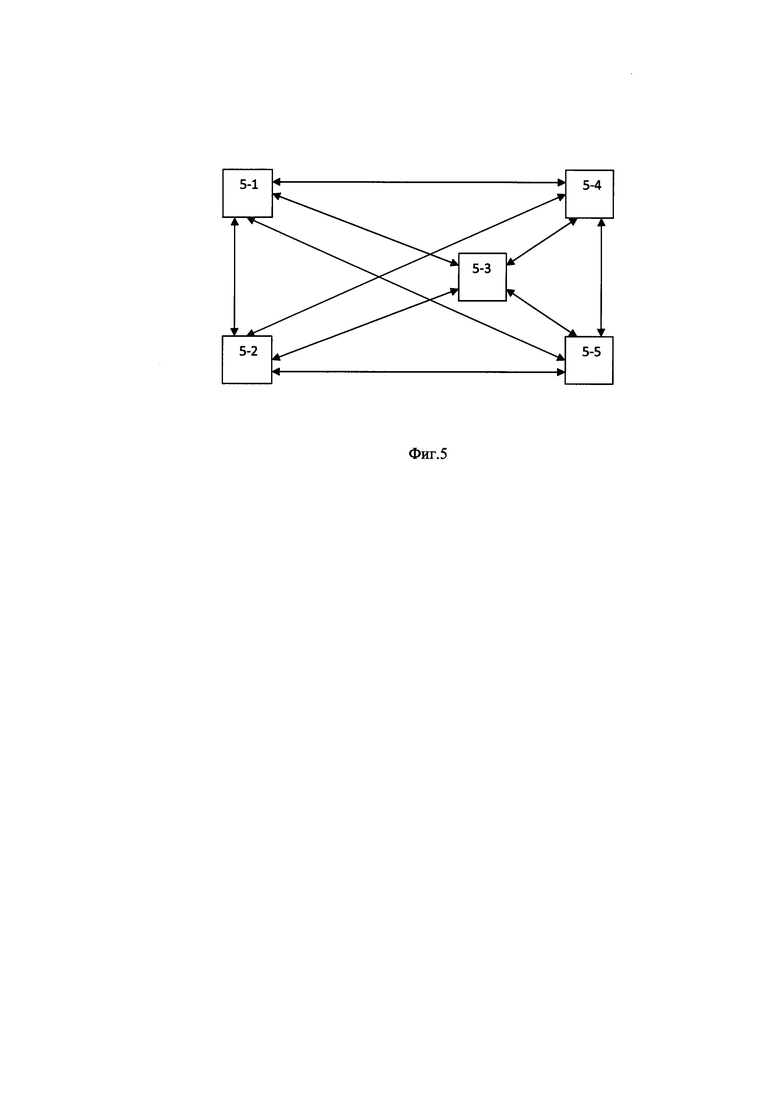
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема КСУ для ЛА с двумя постами управления летчика, на фиг. 2 - схема соединения ВУ СДУ, включенных по схеме две «триады», на фиг. 3 - схема соединения ВУ СДУ, включенных по схеме три «двуады», фиг. 4 - схема соединения ВУ СДУ, включенных по схеме три «двуады», объединенных по полносвязной схеме, фиг. 5 - схема соединения ВУ СДУ, включенных по схеме одна «двуада» и одна «триада», фиг. 6 - схема соединения ВУ СДУ, включенных по схеме две «двуады», объединенных по полносвязной схеме.
КСУ (фиг. 1) содержит на первом посту управления летчика ручку 1 управления с четырехкратно резервированными ДПР по количеству каналов управления (крен, тангаж, рыскание), на втором посту управления летчика ручку 2 управления с четырехкратно резервированными ДПР по количеству каналов управления, пульт 3 ПУ, резервированные вычислители 4 ВС САУ, четырехкратно резервированные ВУ СДУ 5, четырехкратно резервированный блок 6 ИБД, четырехкратно резервированный блок 7 БРН, первый четырехкратно резервированный блок 8 БУП, второй четырехкратно резервированный блок 9 БУП, третий четырехкратно резервированный блок 10 БУП, первый привод 11, второй привод 12, третий привод 13 (число приводов определяется числом рулевых поверхностей ЛА и потребной степенью резервирования), кроме того, на выходах ДПР и ИБД, на входных и выходных сечениях ВС САУ, ВУ СДУ, БРН, БУП и электромеханических приводов установлены четырехкратно резервированные программно-алгоритмические МКР всех сигналов (на чертеже не показаны).
Для управления могут быть использованы три и более привода - в зависимости от типа и класса ЛА.
Управление осуществляют с первого и второго постов управления или от КБО (для БЛА всегда, а для пилотируемого ЛА в ручном, директорном и автоматическом режимах управления).
ПУ 3 - пульт управления служит для принудительного переключения режимов работы ЛА.
ВС САУ 4 - осуществляет связь КБО с КСУ, управление внешними траекторными режимами и т.д. через ВУ СДУ.
ВУ СДУ 5 (5-1 - 5-6) - обеспечивают реализацию полного состава функций автоматического и автоматизированного «ручного» управления (СДУ с системой устойчивости и управляемости (СУУ)) ЛА с обеспечением сигнализации опасных состояний (СОС) и ограничений пилотажных режимов (ОПР) применительно к полному вектору параметров движения ЛА, осуществляют автоматический переход на другие режимы управления и т.д.
ИБД 6 - предназначен для выдачи сигналов, пропорциональных угловым скоростям и линейным ускорениям в связанной с ЛА системе координат.
БРН 7 - предназначен для преобразования сигналов ИБД в сигналы, пропорциональные углам крена и тангажа.
БУП 8, 9, 10 - предназначены для формирования заданного положения или заданных скоростей перемещения штоков приводов. Блоки управления приводами формируют сигналы управления приводом ui на основе информации о заданном положении штока δiзад, а также на основе поступающих из привода с датчиков обратных связей сигналов положения и, при необходимости, скорости перемещения штока δiзад. Тем самым обеспечивается установка штоков в заданное положение.
Ниже приведен один из возможных алгоритмов программно-алгоритмического МКР для канала акселерометров выхода ИБД.
При назначении порогов исходим из того положения, что у исправных датчиков суммарная погрешность не должна превышать П1 и нижняя граница погрешностей не меньше П2.
Проверка акселерометров:






где axi - выходной сигнал i-го акселерометра, i=1-4,
а х - выходной сигнал акселерометров, резервированных ИБД по оси X: (0) - условия не выполнены – отказ; (1) - датчики исправны.
Далее, по результатам сравнения определяем отказавший датчик и осуществляем реконфигурацию. Например: 1.(1) - означает, что в первом уравнении условие выполнено, 4.(0) - в четвертом уравнении условие не выполнено.









10) Одновременный отказ трех датчиков - общий отказ, по показаниям четырех датчиков исправный датчик не определяется. Отказавший датчик определяют путем сравнения с датчиками основного навигационного комплекса и(или) по результатам встроенного контроля.
КСУ имеет три режима управления - основной, альтернативный и резервный (аварийный). В основном режиме обеспечивается решение всех функциональных задач КСУ в полном объеме. Альтернативный режим обеспечивает решение определенного круга задач, несколько суженного по сравнению с основным режимом. В резервном (аварийном) режиме доступны только функции прямого ручного управления.
В КСУ обеспечивают максимальную внутрисистемную унификацию блоков и модулей.
В основном режиме управления ядро КСУ, образованное программно-аппаратными ресурсами СДУ, наращивают за счет соответствующих ресурсов САУ и взаимодействия с КБО. Связь КСУ с системами КБО осуществляют по шинам цифрового обмена, используя вычислители САУ. Основной режим - режим максимальной функциональной конфигурации, в котором задействованы все основные функциональные элементы КСУ при числе вычислителей в каждом контрольном сечении не менее 3-х.
Для повышения живучести КСУ в случае пожара или другого повреждения блоков, в изобретении осуществляют разделение резервов вычислителей системы на блоки левого и правого бортов, в каждом из которых реализуются по два или более резерва и которые будут пространственно рассредоточены на борту ЛА.
В основном режиме управления КСУ обеспечивает реализацию полного состава функций автоматического (САУ) и автоматизированного «ручного» управления (СДУ с системой улучшения устойчивости и управления (СУУ)) ЛА с обеспечением сигнализации опасных состояний (СОС) и ограничений пилотажных режимов (ОПР) применительно к полному вектору параметров движения ЛА, а также осуществляет автоматический переход на альтернативный и резервный режимы управления при наличии соответствующих отказов либо вручную по команде от переключателя ПУ "Альтернативный режим", "Резервный режим", с выдачей соответствующей сигнализации (функция управления режимами КСУ и автоматической реконфигурации режимов).
Альтернативный (промежуточный между основным и резервным) режим включается при наличии отказов в КБО, приводящих к невозможности реализации функций КСУ, обеспечиваемых информацией от систем КБО, а также при возникновении более 2-х отказов собственных вычислителей КСУ в разноименных сечениях вычислительного тракта любого из каналов управления. В альтернативном режиме задействованы все функциональные компоненты КСУ без участия КБО, но допускается возникновение более 2-х последовательных отказов собственных вычислителей КСУ в разноименных контрольных сечениях. В этом случае возможно продолжение полета в ситуации не хуже усложнения условий полета.
В альтернативном режиме задействованы интегрированные блоки датчиков ИБД в качестве датчиков линейных ускорений и угловых скоростей, а в части СДУ задействованы все функциональные элементы, но число резервов вычислителей в каком-либо контрольном сечении из-за отказов уменьшилось до трех. В этом режиме используют функции демпфирования и стабилизации крена и тангажа по сигналам ИБД в помощь ручному управлению летчика. Углы крена и тангажа вычисляют алгоритмами резервной навигации методом адаптивной компенсации погрешностей по сигналам датчиков линейных ускорений. В альтернативном режиме выполняются в полном объеме только ручное автоматизированное управление и нижний уровень ОПР.
Режим резервного (аварийного) управления реализуют в виде ядра КСУ, обособленного по всем видам ресурсов от других устройств КСУ, а также от систем КБО. В резервном режиме управления КСУ реализует только функции прямого ручного управления, при котором управляющие сигналы на органы управления формируются цифровым вычислителем по сигналам датчиков ДПР и (при необходимости) по сигналам ИБД.
В резервный режим КСУ переходит автоматически при возникновении критических отказов (после второго отказа в каком-либо одном контрольном сечении тракта формирования и передачи сигналов управления на уровне СДУ). Резервный режим обеспечивает полет и посадку на ближайший аэродром с помощью прямого ручного управления приводами.
Техническим результатом является расширение функциональных возможностей системы дистанционного управления, улучшение эксплуатационных характеристик, повышение живучести, надежности и отказобезопасности комплексной системы управления полетом. Путем реконфигурации архитектуры и структуры КСУ обеспечивается возможность продолжения полета и выполнения задания при наличии нескольких отказавших элементов в структуре КСУ. Эксплуатация КСУ осуществляется без наземной контрольно-проверочной аппаратуры.
Предложенный способ формирования отказоустойчивой КСУ и устройство для его реализации могут быть осуществлены путем использования базовых элементов для вычислительных систем бортовых цифровых вычислительных машин и базовых элементов, используемых в существующих системах дистанционного управления летательными аппаратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления вертолетом | 2015 |
|
RU2636245C2 |
| Самоорганизующийся навигационный комплекс | 2016 |
|
RU2640964C1 |
| Способ управления полетом летательного аппарата | 2015 |
|
RU2617869C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Способ контроля исправности интегрированных блоков датчиков | 2017 |
|
RU2672311C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |





Изобретение относится к бортовым вычислительным системам и может быть использовано для построения высоконадежных отказоустойчивых комплексных систем управления (КСУ) полетом летательных аппаратов (ЛА). Техническим результатом является повышение живучести, надежности и отказобезопасности системы. Система содержит на каждом посту управления летчика ручку управления с четырехкратно резервированными датчиками положения ручки (ДПР) по количеству каналов управления (крен, тангаж, рыскание), пульт управления, резервированные вычислители (ВУ) системы автоматического управления, четырехкратно резервированные ВУ системы дистанционного управления, четырехкратно резервированный интегральный блок датчиков, четырехкратно резервированный блок резервной навигации, три четырехкратно резервированных блока управления приводами, приводы, число которых определяется числом рулевых поверхностей ЛА и потребной степенью резервирования. 2 н. и 16 з.п. ф-лы, 6 ил.
1. Способ формирования отказоустойчивой комплексной системы управления (КСУ), при котором вычислительные операции выполняют с резервированным процессорным определением локальных сигналов управления, в зависимости от сигналов сенсоров, вводимых летчиком команд, передают данные по разветвленной сети линий передачи данных, осуществляют согласование управляющих сигналов и направляют их к исполнительным механизмам, в процессе функционирования непрерывно осуществляют контроль работы с целью выявления отказавших элементов и исключения их из структуры вычислительной системы, отличающийся тем, что дополнительно объединяют вычислительные средства КСУ в распределенную вычислительную сеть, содержащую реконфигурируемое ядро КСУ, обеспечивающую реализацию всего множества предписанных КСУ летательного аппарата (ЛА) функций в различных режимах применения на основе дистанционного управления исполнительными механизмами, посредством которого осуществляют управление ЛА с одного или с двух постов управления летчика, в зависимости от типа ЛА, через встроенные в посты управления резервированные датчики положения ручки (ДПР) управления с выполнением вычислительных операций и с согласованием входных данных и вычисленных управляющих сигналов в резервированных вычислителях управления (ВУ) системы дистанционного управления (СДУ), посредством обмена данными между резервами ВУ СДУ по линиям связи, с последующей передачей вычисленных сигналов управления по разветвленной сети линий передачи данных к исполнительным механизмам приводов с индивидуальными и резервированными для исполнительных механизмов и соответствующими им цифровыми блоками управления приводов (БУП), причем отказоустойчивость системе обеспечивают программно-алгоритмические модули кворумирования и реконфигурации (МКР) в каждом резерве вычислителей каждого канала входного и выходного сечения сигналов управления, датчиков и исполнительных механизмов, работающие по мажоритарной логике, которые осуществляют проверку исправности резервированных каналов управления, датчиков, резервов вычислителей и исполнительных механизмов путем определения разности сигналов резервов вычислителей одного сечения каждого канала между собой, посредством вычисления и сравнения разностей сигналов с назначенным порогом, что позволяет определить неисправный канал управления, датчик, модуль вычислителя и исполнительного механизма, после чего осуществляют автоматическую реконфигурацию структуры КСУ, при этом для функционирования КСУ ЛА предусматривают три режима работы - основной режим, упрощенный (альтернативный) режим и аварийный (резервный) режим, по результатам проверки исправности КСУ автоматически производят реконфигурацию структуры блоков вычисления и управления и распределенной вычислительной сети КСУ и выбирают один из трех режимов управления с выдачей сигнала на индикатор режимов работы КСУ ЛА, если все вычислители всех сечений каналов управления системы исправны и в КСУ поступает вся необходимая информация из КБО, то КСУ работает в основном режиме с максимальной функциональной конфигурацией, в котором задействованы все основные функциональные элементы КСУ и комплекса бортового оборудования (КБО), при отказах во взаимодействующих системах КБО, либо при нарушении связей с КБО, либо при числе вычислителей в каждом контрольном сечении не менее 3-х или при возникновении более 2-х последовательных отказов в разноименных контрольных сечениях вычислительного тракта любого из каналов управления происходят автоматическое архитектурное преобразование (реконфигурация) блоков системы и переход к альтернативному (упрощенному) режиму управления, при котором задействованы все функциональные компоненты КСУ без взаимодействия с КБО, в этом случае возможно продолжение полета в ситуации не хуже усложнения условий полета, используют режимы демпфирования и стабилизации крена и тангажа по сигналам интегрального блока датчиков (ИБД) в помощь летчику, для ручного управления углы крена и тангажа вычисляют в блоке резервной навигации (БРН) с адаптивной коррекцией от акселерометров в вычислителе ручного управления ВУ СДУ, после второго отказа резервированных каналов управления, датчиков, резервов вычислителей и исполнительных механизмов в каком-либо одном контрольном сечении тракта формирования и передачи сигналов в любом из каналов управления на уровне СДУ, КСУ автоматически переходит в резервный (аварийный) режим управления, в котором сохраняются только напрямую передаваемые к приводам сигналы с рычагов управления ЛА летчиком, в каждом из режимов вычисляют управляющие, предупреждающие (информирующие) сигналы и ограничительные сигналы в соответствии с логикой и алгоритмами управления в выбранном режиме, получают и обрабатывают сигналы обратной связи от исполнительных приводов после отработки команд управления.
2. Способ по п. 1, отличающийся тем, что для беспилотных ЛА (БЛА) в качестве управляющих сигналов используют радиосигналы от наземного пункта управления, соответствующие параметрам полета ЛА, обработку которых осуществляют посредством вычислительных средств КСУ.
3. Способ по п. 1 или 2, отличающийся тем, что для повышения живучести КСУ три или более резервов вычислителей системы разделяют на шкафы-крейты, которые пространственно рассредоточивают на борту ЛА, причем, в зависимости от типа и особенностей ЛА, используют соответствующую конфигурацию схемы соединения ВУ СДУ основного режима работы КСУ.
4. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме две «триады», разнесенные на два шкафа-крейта по левому и правому борт у ЛА и объединенные каналами межмашинного обмена (ММО).
5. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме три «двуады», разнесенные на три шкафа-крейта по левому, правому борту и в центральной части ЛА и объединенные каналами ММО.
6. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме три «двуады» резервов вычислителей, объединенных по полносвязанной схеме.
7. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме одна «двуада» и одна «триада» резервов вычислителей, разделенных на шкафы-крейты, разнесенные по правому и левому борту ЛА и объединенные каналами ММО.
8. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме две «двуады» резервов вычислителей, разделенных на шкафы-крейты, разнесенные по правому и левому борту ЛА и объединенные каналами ММО по полносвязной схеме.
9. Способ по п. 3, отличающийся тем, что ВУ СДУ включают по схеме, в которой каждому из трех и более вычислителей резервов, объединенных по каналам ММО либо по полносвязной схеме, выделяют свой шкаф-крейт и разносят их по борту ЛА.
10. Отказоустойчивая КСУ, содержащая в каждом канале управления органы управления, кинематически связанные с датчиками ДПР, электрически связанными с резервированными вычислительными устройствами, которые связаны с КБО и оконечными исполнительными устройствами, выходы которых подключены к указанным вычислителям, резервированные внутренние и внешние шины информационного обмена, мажоритарные элементы и реконфигураторы вычислительных устройств по количеству резервных каналов, отличающаяся тем, что она дополнительно содержит на каждом посту управления летчика четырехкратно резервированные в каждом канале управления ДПР, пульт управления (ПУ), двух- и более кратно резервированную вычислительную систему САУ (ВС САУ), четырехкратно и более кратно резервированное ВУ СДУ, трех- или четырехкратно резервированный ИБД, трех- или четырехкратно резервированный блок БРН, группу из четырехкратно резервированных БУП, количество групп БУП определяется количеством рулевых аэродинамических поверхностей и их секций, трех-, четырех- или более кратно резервированные программно-алгоритмические МКР сигналов управления, датчиков, резервов вычислителей и исполнительных механизмов входного и выходного сечения по мажоритарной логике, четырехкратно резервированные в каждом канале (крена, тангажа и рыскания) ДПР постов управления летчика подключены к входам трех-, четырехкратно и более кратно резервированных ВУ СДУ, которые соединены между собой и с ВС САУ и соединены с выходами ИБД и БРН, соответственно входы резервированных БУП соединены с соответствующими выходами ВУ СДУ, а выходы БУП подключены к входам соответствующих электромеханических или электрогидравлических приводов, трех- или четырехкратно резервированные БРН соединены с соответствующими выходами резервированного ИБД, входы ВС САУ соединены с выходами КБО и ПУ, в зависимости от требований к КСУ, используемых на различных типах ЛА.
11. Система по п. 10, отличающаяся тем, что для беспилотных летательных аппаратов она содержит приемник радиосигналов от наземного пункта управления, соответствующих параметрам полета ЛА, обработку которых осуществляют посредством вычислительных средств КСУ.
12. Система по п. 10 или 11, отличающаяся тем, что с целью повышения живучести КСУ три или более резервов ВУ СДУ размещены в шкафах-крейтах, которые пространственно рассредоточены на борту ЛА и соединены по соответствующей схеме.
13. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, шестикратно резервированные и соединенные по схеме две «триады», размещенные в двух шкафах-крейтах, разнесенных по левому и правому бортам ЛА и объединенных каналами ММО.
14. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, шестикратно резервированные и соединенные по схеме три «двуады», размещенные в трех шкафах-крейтах по левому, правому борту и в центральной части ЛА, объединенных каналами ММО.
15. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, соединенные по схеме три «двуады» резервов вычислителей и объединенные по полносвязной схеме.
16. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, соединенные по схеме одна «двуада» и одна «триада», размещенные в шкафах-крейтах, разнесенных по правому и левому борту ЛА, и объединенные каналами ММО.
17. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, соединенные по схеме две «двуады» и объединенные по полносвязной схеме.
18. Система по п. 12, отличающаяся тем, что она содержит функциональные модули ВУ СДУ, соединенные по схеме, в которой каждый из трех и более резервов вычислителей объединены по каналам ММО либо по полносвязной схеме и размещены в отдельных шкафах-крейтах, разнесенных по борту ЛА.
| САПОГОВ В.А | |||
| и др | |||
| "ОТКАЗОБЕЗОПАСНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ КОМПЛЕКСНЫХ СИСТЕМ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ" - ЭЛЕКТРОННЫЙ ЖУРНАЛ "ТРУДЫ МАИ", Выпуск N45, 09.06.2011 (Найдено в Интернет по адресу: www.mai.ru/science/trudy/) | |||
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| СПОСОБ И ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ОТКАЗОУСТОЙЧИВОЙ ОБРАБОТКИ ИНФОРМАЦИИ КРИТИЧЕСКИХ ФУНКЦИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2413975C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 9233763 B1, 12.01.2016. | |||

