Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальные системы навигации, спутниковые системы навигации, радионавигационные системы, оптико-электронные и дальномерные системы навигации, и может быть использовано при осуществлении навигации высокодинамичных ЛА в сложных навигационных условиях. Изобретение предназначено для бортовых вычислительных систем, структура которых может быть использована при создании высоконадежных отказоустойчивых навигационных комплексов (НК), обеспечивающих точными и надежными навигационными параметрами полета системы дистанционного управления (СДУ) и системы автоматического управления (САУ) ЛА и других потребителей.
В основу предлагаемого изобретения положено многократное резервирование каналов информационного обмена, датчиков, вычислителей и средств контроля и реконфигурация архитектуры вычислительных устройств и структуры НК, в зависимости от состояния модулей вычислительных устройств и бортовых систем навигации ЛА. Управление аппаратной и вычислительной избыточностью осуществляется в зависимости от состояния системы программно-алгоритмически и аппаратно.
Существуют множество навигационных комплексов летательных аппаратов, например приведенных в патентах РФ №2204505, №2260177, №2439674, №2481558, №2558699.
Общим недостатком известных навигационных комплексов является относительно невысокая надежность выдачи достоверных навигационных параметров. В случае появления отказа или пропадания сигналов от бортовых навигационных корректоров они теряют точность и надежность обеспечения потребителей достоверной навигационной информацией.
Наиболее близкой по технической сущности к заявляемой является отказоустойчивая вычислительная система, описанная в патенте РФ №2439674, МПК 7 G06F 15/16, опубл. 10.01.2012 г., бюл. №1, принятая нами в качестве прототипа.
Отказоустойчивая вычислительная система содержит N центральных процессоров и N процессоров ввода-вывода в симметричной конфигурации соединения, которые определяют состояние соответствующего средства обработки каналов и обеспечивают передачу его состояния другому средству обработки, определяют запрос на выполнение задания средствами обработки между собой, позволяющий любому одному средству обработки по какому-либо заранее выбранному критерию или по их совокупности выполнять функцию ведущего средства обработки в симметричной конфигурации для текущего управления периферийными и исполнительными устройствами, входы всех средств обработки подсоединены к общему источнику входных данных, все средства обработки, имеющие идентичные образы памяти программ, синхронно выполняют запрос на задание, а результаты выполнения передают по каналам связи между всеми средствами обработки, в каждом из которых собственные результаты программно сравнивают с результатами остальных по мажоритарному принципу, восстанавливают достоверное значение результата, которое рассылают всем средствам обработки, так что ошибку сбившегося средства обработки парируют в нем достоверным значением, а при следующих подряд повторениях идентичной ошибки неисправное средство обработки переводят в резерв или отключают.
Недостатком известного устройства является необходимость выделения ведущего средства обработки в симметричной конфигурации, необходимость применения двух вычислительных устройств в каждом канале, при этом система контроля и диагностики по мажоранте и конфигуратор используются только по числу каналов. Известное устройство. применимое в основном для контроля внутренних процессорных модулей, не охватывает всю систему управления и не учитывает особенностей организации НК ЛА.
Целью представленного изобретения является расширение функциональных возможностей и повышение надежности, живучести, отказобезопасности и универсальности использования комплекса навигации путем автономной реконфигурации структуры вычислительного и корректирующего бортового оборудования ЛА.
Указанная цель достигается тем что, в самоорганизующийся навигационный комплекс, содержащий бесплатформенную инерциальную навигационную систему (БИНС), включающую интегральный блок датчиков (ИБД), магнитометрический датчик (МД), систему воздушных сигналов (СВС), спутниковую навигационную систему (СНС), радиотехническую навигационную систему (РНС), лазерный дальномер (ЛД), оптико-электронную и астронавигационную систему (ОЭСН), дополнительно введены трех или более кратно резервированные вычислительные устройства (ВУ), трех илиболее кратно резервированные блоки резервной навигации (БРН), трех или более кратно резервированные программно-алгоритмические модули кворумирования и реконфигурации (МКР) каждого канала входного и выходного сечения сигналов управления, датчиков и вычислителей-резервов, трех или более кратно резервированные блоки хранения базы данных на программно-алгоритмическое обеспечение (ПАО) режимов начальной подготовки (БХНВ), трех или более кратно резервированные блоки хранения моделей датчиков и бортовых систем навигации (БХМ), трех или более кратно резервированные блоки хранения ПАО комплексной обработки информации (БХКО), резервированные ВУ, соединенные между собой каналами межмашинного обмена (ММО), соединены с выходами ИБД, выполненного трех или более кратно резервированным, БРН, подключенных к соответствующим выходам ИБД, и МД, а также соединены с шинами вычислителей бортовых навигационных корректоров (БНК) и с шинами потребителей навигационной информации, при этом к шинам ВУ подключены выходы БХНВ, БХМ и БХКО.
Для повышения живучести НК в случае пожара или другого повреждения блоков, трех или более кратно резервированные ВУ НК размещены в шкафах-крейтах, разнесенных по левому и правому бортам и по центру фюзеляжа ЛА, в каждом из которых могут быть реализованы по два или более резерва, соединенных по сокращенной либо полносвязной схеме.
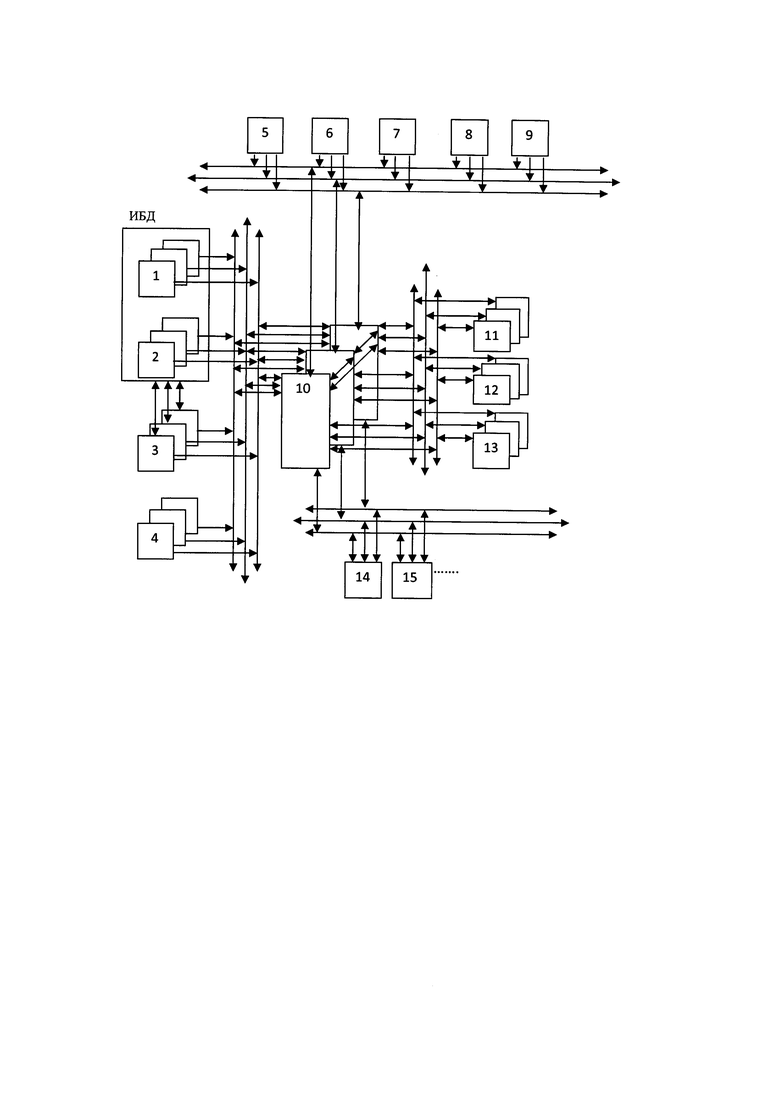
Сущность изобретения поясняется чертежом, на котором представлена структурная схема НК.
НК содержит БИНС, включающую трех или более кратно резервированный ИБД, состоящий из трехкратно резервированных датчиков 1 угловых скоростей (ДУС) и датчиков 2 линейных ускорений (ДЛУ), трех или более кратно резервированные блоки 3 резервной навигации, трех или более кратно резервированные программно-алгоритмические модули кворумирования и реконфигурации (МКР) каждого канала входного и выходного сечения сигналов управления, датчиков и вычислителей-резервов (МКР на схеме не показаны), трехкомпонентный магнитометрический датчик 4, СВС 5, СНС 6, РНС 7, ЛД 8, ОЭСН 9, трех или более кратно резервированные ВУ 10, трех или более кратно резервированные блоки БХНВ 11, трех или более кратно резервированные блоки БХМ 12, трех или более кратно резервированные блоки БХКО 13, потребители навигационной информации, такие как СДУ 14, САУ 15. Резервированные ВУ 10, соединенные между собой шинами ММО, соединены с соответствующими выходами ДУС и ДЛУ ИБД, с выходами БРН и МД, а также с шинами вычислителей БНК и потребителей навигационной информации СДУ, САУ и др., при этом к шинам ВУ 10 подключены выходы БХНВ, БХМ и БХКО.
В зависимости от количества резервных ВУ для заявляемой НК могут быть предусмотрены различные варианты схем соединения резервов ВУ НК. Например:
- для четырехкратно резервированных ВУ - по схеме две «двуады», объединенные по полносвязной схеме;
- для пятикратно резервированных ВУ - по схеме одна «двуада» и одна «триада», объединенных каналами ММО по соответствующей схеме;
- для шестикратно резервированных ВУ соединения могут быть осуществлены по схеме две «триады», размещенные в двух шкафах-крейтах, разнесенных по левому и правому бортам ЛА и объединенных каналами ММО по соответствующей схеме, или по схеме три «двуады»;
МКР осуществляют проверку исправности резервированных каналов управления, датчиков и вычислителей-резервов путем проверки разности сигналов одного сечения каждого канала между собой или моделью посредством вычисления и сравнения разностей сигналов с назначенным порогом, что позволяет определить неисправный канал управления, датчика и модуля ВУ, после чего осуществляют самостоятельную реорганизацию архитектуры ВУ и структуры НК. Характеристики погрешностей измерительных систем, навигационных датчиков могут быть определены методом статистической обработки реализаций измерений или методом вариации Алана по одной реализации случайного процесса.
Модельные значения контролируемых параметров определяются косвенным аналитическим путем по текущим значениям параметров полета ЛА или по сигналам БНК.
Ниже приведем один из возможных алгоритмов программно-алгоритмического МКР для канала ДЛУ выхода ИБД.
При назначении порогов исходят из того положения, что у исправных датчиков суммарная погрешность не должна превышать П1 и нижняя граница погрешностей не меньше П2.
Проверка акселерометров:
1. П2≤ах1-ах2≤П1→(0, 1);
2. П2≤ах1-ах3≤П1→(0, 1);
3. П2≤ах1-ах4≤П1→(0, 1);
4. П2≤ax2-ax3≤П1→(0, 1);
5. П2≤ах2-ах4≤П1→(0, 1);
6. П2≤ах3-ах4≤П1→(0, 1);
где аxi - выходной сигнал i-го ДЛУ, i=1-4; ах - выходной сигнал ДЛУ резервированных ИБД по оси X; (0) - условия не выполнены - отказ; (1) - датчики исправны.
Далее по результатам сравнения определяют отказавший датчик и осуществляют реконфигурацию. Например: 1.(1) - означает, что в первом уравнении условие выполнено, 4.(0) - в четвертом уравнении условие не выполнено. Решающее правило следующее:
1) 1.(1)+2.(1)+3.(1)+4.(1)+5.(1)+6.(1) → все исправны, ах=(ах1+ах2+ах3+ах4)/4;
2) 1.(0)+2.(0)+3.(0) → отказ ax1, ах=(ах2+ах3+ах4)/3;
3) 1.(0)+4.(0)+5.(0) → отказ ах2, ах=(ах1+ах3+ах4)/3;
4) 2.(0)+4.(0)+6.(0) → отказ ах3, ах=(ах2+ах1+ах4)/3;
5) 3.(0)+5.(0)+6.(0) → отказ ах4, ах=(ах2+ах3+ах1)/3;
6) 1.(0)+2.(0)+3.(0)+4.(0)+5.(0) → отказ ах1 и ах2- → ах=(ах3+ах4)/2;
7) 1.(0)+2.(0)+4.(0)+5.(0)+6.(0) → отказ ах2 и ах3 → ах=(ах1+ах4)/2;
8) 2.(0)+3.(0)+4.(0)+5.(0)+6.(0) → отказ ах3 и ах4 → ах=(ах1+ах2)/2;
9) 1.(0)+2.(0)+3.(0)+5.(0)+6.(0) → отказ ах1 и ах4 → ах=(ах3+ах2)/2;
Одновременный отказ трех датчиков - принимают за общий отказ. В этом случае по показаниям четырех датчиков исправный датчик не определяется. Отказавшие датчики определяют путем сравнения с датчиками БНК.
В НК обеспечивают максимальную внутрисистемную унификацию блоков и модулей. НК имеет три режима управления - основной, альтернативный и резервный (аварийный). В основном режиме обеспечивается решение всех функциональных задач НК в полном объеме. Альтернативный режим обеспечивает решение определенного круга задач, несколько суженного по сравнению с основным режимом. Резервный режим обеспечивает только функции вывода в район ближайшего аэродрома или к аэродрому базирования.
В основном режиме управления ядро НК, образованное программно-аппаратными ресурсами, наращивают за счет соответствующих ресурсов и взаимодействия с БНК. Связь НК с системами БНК осуществляют по шинам цифрового обмена. Основной режим - режим максимальной функциональной конфигурации, в котором задействованы все основные функциональные элементы НК при числе вычислителей в каждом контрольном сечении не менее 2-х.
В основном режиме НК обеспечивает реализацию режима начальной подготовки, включающую начальную выставку БИНС на подвижном или на неподвижном основании, определяет состав бортовых навигационных датчиков и систем, характеристики их погрешностей и их модели из базы данных, определяет способ и алгоритм интегрирования сигналов навигационных датчиков и программно-алгоритмическое обеспечение для комплексной обработки сигналов БИНС и бортовых навигационных систем, осуществляет постоянный контроль исправности и достоверности передаваемых сигналов всех резервированных датчиков, систем навигации и резервированных модулей вычислительных устройств, входящих состав НК, в зависимости от их состояния осуществляет реорганизацию структуры НК и реконструкцию архитектуры модулей вычислителей НК, при необходимости осуществляет переключение режима работы НК в альтернативный режим.
НК осуществляет автоматический переход на альтернативный и резервный режимы навигации при наличии соответствующих отказов, либо вручную по команде от переключателя ПУ "Альтернативный режим", "Резервный режим", с выдачей соответствующей сигнализации.
В альтернативном режиме не работает СНС или возникает отказ в сети межмашинного обмена, или отказ одного из вычислителей, но оставшийся состав НК позволяет продолжить полет до пункта назначения или обеспечить выполнение задачи. В этом режиме продолжается работа НК путем комплексной обработки сигналов ИНС и других, исправно работающих бортовых систем навигации, осуществляется контроль всех рабочих систем и датчиков. Альтернативный (промежуточный между основным и резервным) режим включается при наличии отказов в БНС, приводящих к невозможности реализации функций НК, обеспечиваемых информацией от систем БНС, а также при возникновении более 2-х отказов модулей собственных вычислителей НК в разноименных сечениях вычислительного тракта любого из каналов управления. В альтернативном режиме задействованы все функциональные компоненты НК без участия СНС. В этом случае возможно продолжение полета в ситуации не хуже усложнения условий полета.
В резервный режим НК переходит при выявлении отказов двух вычислителей, при отказе всех бортовых систем навигации, обеспечивающих неавтономную коррекцию ИНС, или при отказе двух датчиков навигационной информации БИНС. В резервном режиме работает автономная коррекция БИНС по сигналам акселерометров, ДУС и магнитометрических датчиков измерения проекций составляющих магнитного поля Земли в связанной с ЛА системе координат. Используя алгоритмы адаптивной обработки сигналов, трехкомпонентных ДУС, ДЛУ и МД в НК организуют адаптивную резервную курсовертикаль [1, 2]. Режим резервной навигации реализуют в виде ядра НК, обособленного по всем видам ресурсов от других устройств НК, а также от систем БНК. Резервный режим обеспечивает только вывод ЛА на ближайший или заданный район аэродрома посадки.
Техническим результатом изобретения является расширение функциональных возможностей НК, улучшение эксплуатационных характеристик, повышение живучести, надежности и отказобезопасности комплексной навигации. Путем автономной реконфигурации архитектуры и структуры НК, обеспечивается возможность продолжения полета и выполнения задания при наличии нескольких отказавших элементов в структуре НК. Эксплуатация НК осуществляется без наземной контрольно-проверочной аппаратуры.
Предложенное техническое устройство может быть реализовано путем использования базовых элементов для вычислительных систем бортовых цифровых вычислительных машин и базовых элементов, используемых в существующих НК летательных аппаратов.
Литература
1. Патент №2564379, Бесплатформенная инерциальная курсовертикаль, МПК G01C 21/16, бюллетень №27, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А. и др.
2. Патент №2555496, Способ для определения углов пространственной ориентации подвижного объекта, МПК G01C 21/08, G01R 33/02, бюллетень №19, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| Способ контроля исправности интегрированных блоков датчиков | 2017 |
|
RU2672311C1 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
| Система дистанционного управления вертолетом | 2015 |
|
RU2636245C2 |
| Способ управления полетом летательного аппарата | 2015 |
|
RU2617869C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации и может быть использовано при осуществлении навигации высокодинамичных ЛА в сложных навигационных условиях. Технический результат - расширение функциональных возможностей навигационного комплекса (НК), повышение живучести, надежности и отказобезопасности комплексной навигации. Для этого на основе автономной реконфигурации архитектуры и структуры НК обеспечивается возможность продолжения полета и выполнения задания при наличии нескольких отказавших элементов в структуре НК. Эксплуатация НК осуществляется без наземной контрольно-проверочной аппаратуры. НК содержит интегральный блок датчиков, выполненный трех или более кратно резервированным, магнитометрический датчик, систему воздушных сигналов, спутниковую навигационную систему, радиотехническую навигационную систему, лазерный дальномер, оптико-электронную и астронавигационную систему. В НК дополнительно введены трех или более кратно резервированные вычислительные устройства, трех или более кратно резервированные блоки резервной навигации, трех или более кратно резервированные программно-алгоритмические модули кворумирования и реконфигурации каждого канала входного и выходного сечения сигналов управления, датчиков и вычислителей-резервов, трех или более кратно резервированные блоки хранения базы данных на программно-алгоритмическое обеспечение (ПАО) режимов начальной подготовки, трех или более кратно резервированные блоки хранения моделей датчиков и бортовых систем навигации и трех или более кратно резервированные блоки хранения ПАО комплексной обработки информации. 1 з.п. ф-лы, 1 ил.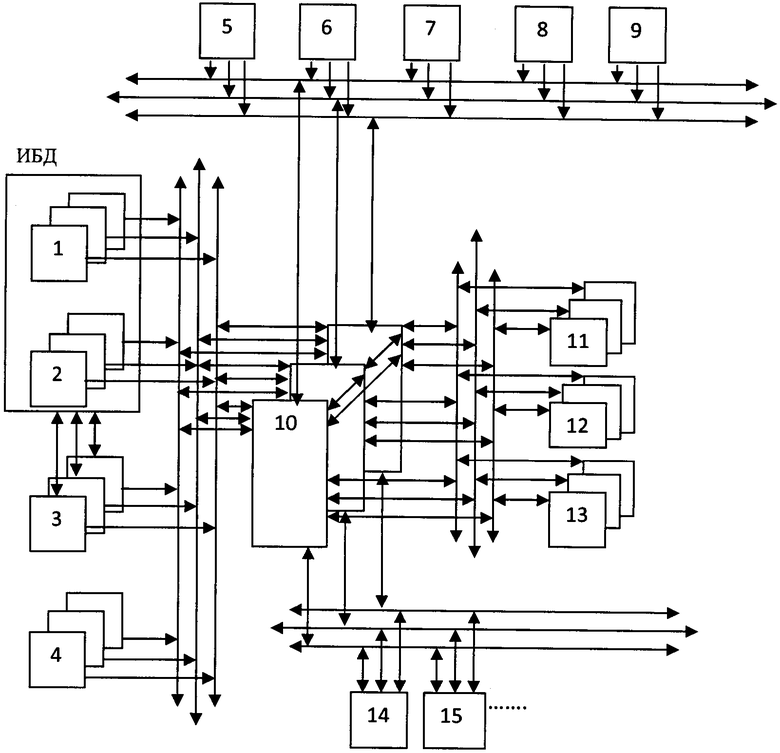
1. Самоорганизующийся навигационный комплекс, содержащий бесплатформенную инерциальную навигационную систему (БИНС), включающую интегральный блок датчиков (ИБД), магнитометрический датчик (МД), систему воздушных сигналов (СВС), спутниковую навигационную систему (СНС), радиотехническую навигационную систему (РНС), лазерный дальномер (ЛД), оптико-электронную и астронавигационную систему (ОЭСН), отличающийся тем, что в него дополнительно введены трех или более кратно резервированные вычислительные устройства (ВУ), трех или более кратно резервированные блоки резервной навигации (БРН), трех или более кратно резервированные программно-алгоритмические модули кворумирования и реконфигурации (МКР) каждого канала входного и выходного сечения сигналов управления, датчиков и вычислителей-резервов, трех или более кратно резервированные блоки хранения базы данных на программно-алгоритмическое обеспечение (ПАО) режимов начальной подготовки (БХНВ), трех или более кратно резервированные блоки хранения моделей датчиков и бортовых систем навигации (БХМ), трех или более кратно резервированные блоки хранения ПАО комплексной обработки информации (БХКО), резервированные ВУ, соединенные между собой каналами межмашинного обмена (ММО), соединены с выходами ИБД, выполненного трех или более кратно резервированным, БРН, подключенных к соответствующим выходам ИБД, и МД, а также соединены с шинами вычислителей бортовых навигационных корректоров (БНК) и с шинами потребителей навигационной информации, при этом к шинам ВУ подключены выходы БХНВ, БХМ и БХКО.
2. Навигационный комплекс по п. 1, отличающийся тем, что для повышения живучести навигационного комплекса (НК) в случае пожара или другого повреждения блоков, трех или более кратно резервированные ВУ НК размещены в шкафах-крейтах, разнесенных по левому и правому бортам и по центру фюзеляжа ЛА, в каждом из которых могут быть реализованы по два или более резерва, соединенных по сокращенной либо полносвязной схеме.
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| Станок для обтяжки мебельных подушек | 1954 |
|
SU113243A1 |
| US 20050055143 А1, 10.03.2005 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Информационная теория идентификации | |||
| - М.: Наука, 1995, с | |||
| АППАРАТ ДЛЯ ОБОГАЩЕНИЯ РУД ПО МЕТОДУ ВСПЛЫВАНИЯ | 1915 |
|
SU279A1 |
| Интеллектуальная система сбора и обработки данных в интерактивных системах программного управления, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - М.: СОЛОН-ПРЕСС, 2014. | |||

