Изобретение относится к точной механике и может быть использовано для сближения зонда и образца в сканирующей зондовой микроскопии.
Известно устройство механического перемещения для сканирующего зондового микроскопа, содержащее основание, СЗМ головку, оснащенную первой опорой, второй опорой, третьей опорой, при этом первая опора сопряжена с основанием и снабжена первым приводом, установленным на головке, а вторая опора и третья опора также сопряжены с основанием (Патент RU 2161343).
В этом устройстве в качестве подвижной опоры используется первая опора. В результате этого СЗМ головка в процессе подвода вместе с зондом изменяет угол по отношению к плоскости поверхности образца. Это приводит к снижению точности измерений. Данное устройство выбрано в качестве прототипа предложенного решения.
Технический результат предложенного решения заключается в повышении точности измерений.
Указанный технический результат достигается тем, что в устройстве механического перемещения для сканирующего зондового микроскопа, содержащем основание, СЗМ головку, оснащенную первой опорой, второй опорой, третьей опорой, при этом первая опора сопряжена с основанием и снабжена первым приводом, установленным на головке, а вторая опора и третья опора также сопряжены с основанием, вторая опора снабжена вторым приводом, установленным на головке, и третья опора снабжена третьим приводом, установленным на головке.
Существует вариант, в котором первый привод, второй привод и третий привод содержат передаточный механизм, обеспечивающий поступательное перемещение первой опоры, второй опоры и третьей опоры.
Существует вариант, в котором первый привод, второй привод и третий привод содержат модуль измерения перемещения.
Существует вариант, в котором первый привод, второй привод и третий привод содержат датчики крайних положений.
Существует вариант, в котором корпус первого привода, второго привода и третьего привода выполнены из титана.
Существует вариант, в котором в него введен теплоотводящий модуль, сопряженный с мотором.
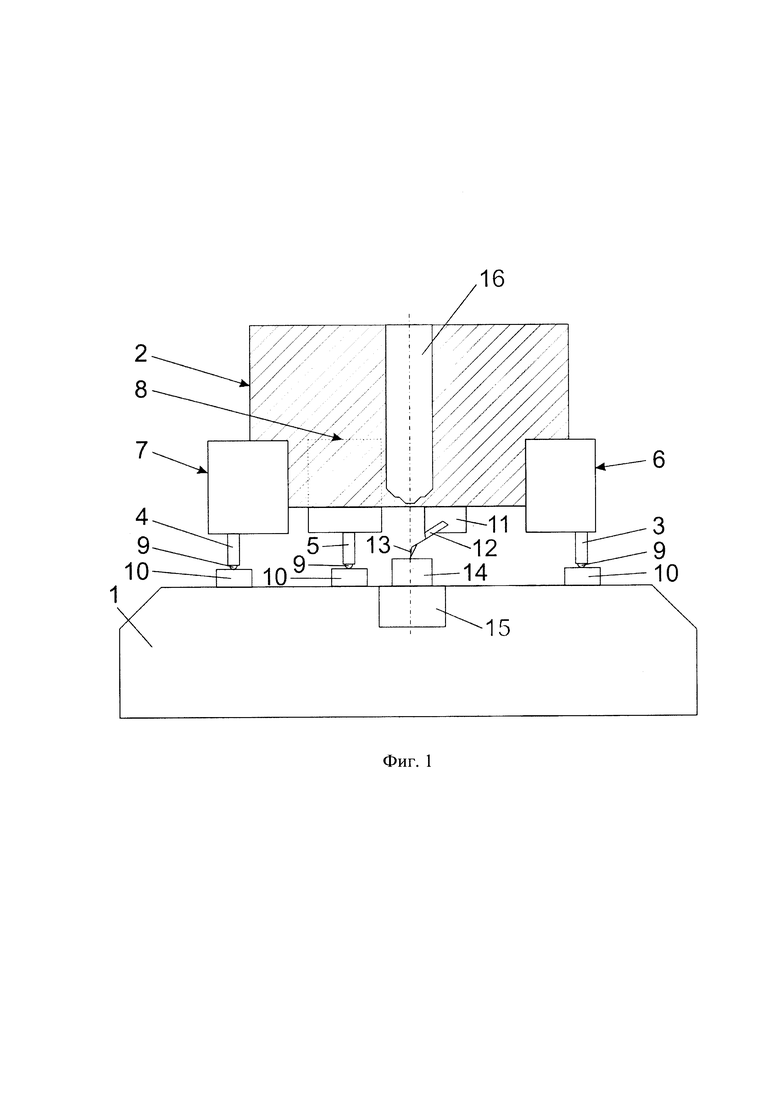
На фиг. 1 изображено устройство механического перемещения для сканирующего зондового микроскопа, вид сбоку.
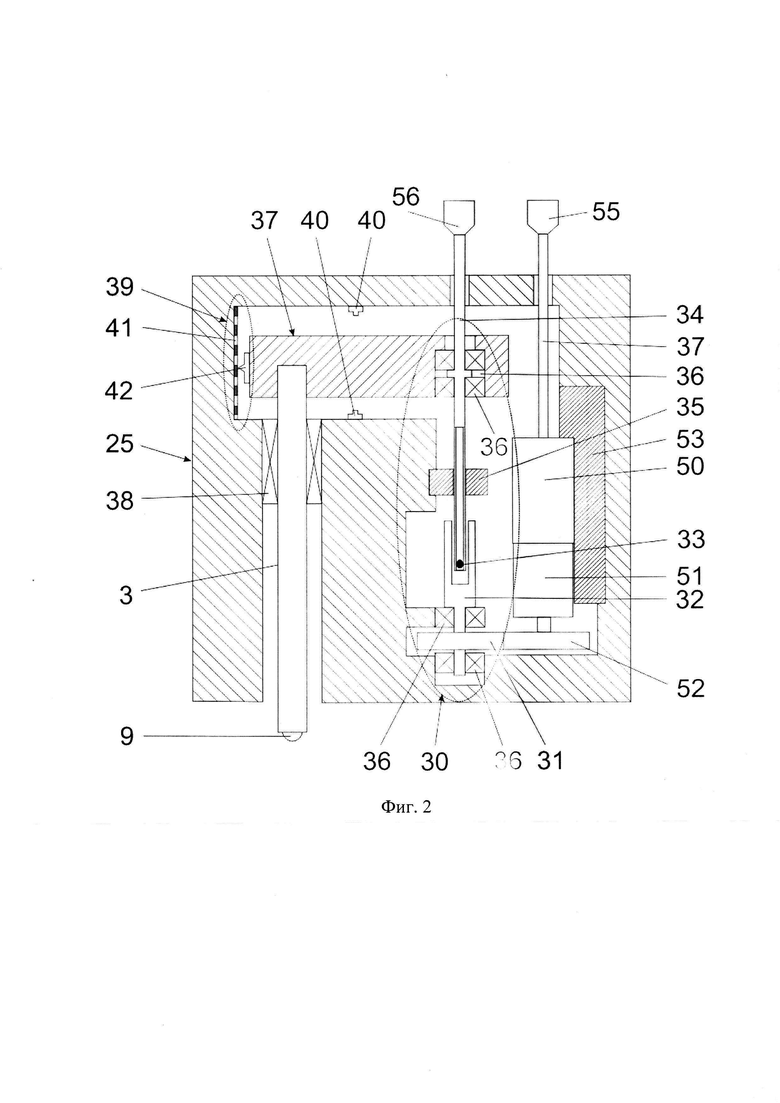
На фиг. 2 изображен привод устройства механического перемещения для сканирующего зондового микроскопа.
Устройство механического перемещения для сканирующего зондового микроскопа содержит основание 1 (фиг. 1), СЗМ головку 2, оснащенную первой опорой 3, второй опорой 4, третьей опорой 5. При этом первая опора 3 сопряжена с основанием 1 и снабжена первым приводом 6, установленным на СЗМ головке 2, вторая опора 4 снабжена вторым приводом 7, установленным на СЗМ головке 2, и третья опора 5 снабжена третьим приводом 8, установленным на СЗМ головке 2. Опоры 3, 4 и 5 содержат первые вкладыши 9, сопряженные со вторыми вкладышами 10, установленными на основании 1. Первые вкладыши 9 могут быть выполнены из стали ШХ15, вторые вкладыши 10 - из поликора. На СЗМ головке 2 закреплен модуль зонда 11 с зондом 12, включающим острие 13. На основании 1 установлен образец 14, сопряженный с зондом 12. В одном из вариантов образец 14 установлен на пьезосканере 15, закрепленном на основании 1. В СЗМ головке 2 может быть расположен объектив 16.
В корпусе 25 (фиг. 2) первого привода 6, второго привода 7 и третьего привода 8 расположен передаточный механизм 30, обеспечивающий поступательное перемещение первой опоры 3, второй опоры 4 и третьей опоры 5. Передаточный механизм 30 включает первую шестеренку 31, соединенную с направляющей 32, в пазу которой расположен штифт 33 винта 34, сопряженного с гайкой 35, закрепленной в корпусе 25. Передаточный механизм 30 установлен посредством подшипников 36 и сопряжен с платформой 37, в которой закреплена, например, первая опора 3, сопряженная с фрикционным элементом 38, закрепленным в корпусе 25.
Первый привод 6, второй привод 7 и третий привод 8 содержат модуль измерения перемещения 39.
Первый привод 6, второй привод 7 и третий привод 8 содержат датчики крайних положений 40.
В одном из вариантов модуль измерения перемещения 39 может включать датчик положения 41, закрепленный на корпусе 25, и считывающую головку 42, установленную на платформе 37.
Корпус 25 первого привода 6, второго привода 7 и третьего привода 8 выполнены из титана.
В корпусе 25 установлен мотор 50 с редуктором 51 и второй шестеренкой 52.
В корпусе 25 установлен теплоотводящий модуль 53, сопряженный с мотором 50.
Мотор 50 может быть снабжен первой рукояткой 55, а винт 34 - второй рукояткой 56.
Устройство механического перемещения для сканирующего зондового микроскопа работает следующим образом. Попеременно включая первый привод 6, второй привод 7 и третий привод 8, осуществляют подвод зонда 12 под нужным углом острия 13 к объекту 14. Первый привод 6, второй привод 7 и третий привод 8 работают следующим образом. Включают мотор 50 и посредством редуктора 51, второй шестеренки 52 и первой шестеренки 31 осуществляют вращение направляющей 32, которая вращает винт 34 посредством штифта 33. При вращении винта 34 в результате его взаимодействия с гайкой 35 происходит его осевое перемещение. При этом осуществляется линейное перемещение платформы 37 с первой опорой 3. При необходимости такое же перемещение можно осуществлять с использованием рукояток 55 и 56.
То, что в устройстве механического перемещения для сканирующего зондового микроскопа вторая опора 4 снабжена вторым приводом 7, установленным на СЗМ головке 2, и третья опора 5 снабжена третьим приводом 8, установленным на СЗМ головке 2, позволяет осуществлять плоскопараллельный подвод зонда 12 к образцу 14. Это позволяет обеспечить оптимальный угол зонда 12 (например, чтобы острие 13 располагалось по нормали к поверхности образца 14) относительно измеряемой поверхности образца 14, что повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат передаточный механизм 30, обеспечивающий поступательное перемещение первой опоры 3, второй опоры 4 и третьей опоры 5 уменьшает трение этих опор о вторые вкладыши 10 основания 1. Это уменьшает их выработку, увеличивает стабильность положения СЗМ головки 2 в процессе сканирования образца 14 и повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат модуль измерения перемещения 39 позволяет уменьшить вероятность несанкционированного касания зондом 12 образца 14, обеспечивает его сохранность и повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат датчики крайних положений 40 повышает надежность работы устройства.
То, что корпус 25 первого привода 6, второго привода 7 и третьего привода 8 выполнены из титана, уменьшает термические дрейфы устройства и повышает точность измерений.
То, что в устройство введен теплоотводящий модуль 53, сопряженный с мотором 50, уменьшает термические дрейфы устройства и повышает точность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| МНОГОЗОНДОВЫЙ МОДУЛЬ ДЛЯ СКАНИРУЮЩЕГО МИКРОСКОПА | 2006 |
|
RU2306524C1 |
| Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере | 2021 |
|
RU2778278C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| УСТРОЙСТВО МАНИПУЛИРОВАНИЯ | 2014 |
|
RU2591871C2 |
| Способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа | 2017 |
|
RU2695027C2 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2522776C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ БИОЛОГИЧЕСКИХ ПРИМЕНЕНИЙ | 2008 |
|
RU2472165C2 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
Изобретение относится к точной механике и может быть использовано для сближения зонда и образца в сканирующей зондовой микроскопии. Сущность изобретения заключается в том, что в устройстве механического перемещения для сканирующего зондового микроскопа, содержащем основание 1, СЗМ головку 2, оснащенную первой опорой 3, второй опорой 4, третьей опорой 5, при этом первая опора 3 сопряжена с основанием 1 и снабжена первым приводом 6, установленным на СЗМ головке 2, а вторая опора 4 и третья опора 5 также сопряжены с основанием, вторая опора 4 снабжена вторым приводом 7, установленным на СЗМ головке 2, и третья опора 5 снабжена третьим приводом 8, установленным на СЗМ головке 2. Технический результат предложенного решения заключается в повышении точности измерений. 5 з.п. ф-лы, 2 ил.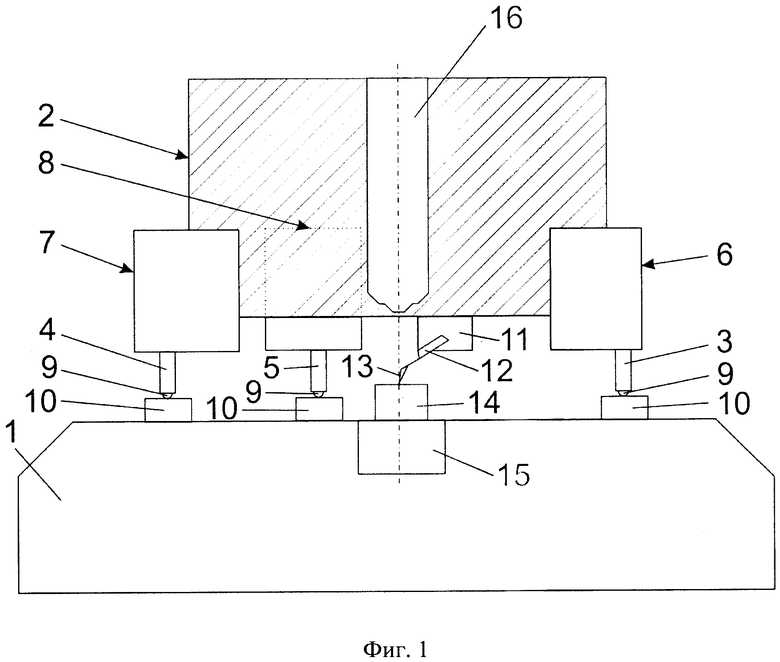
1. Устройство механического перемещения для сканирующего зондового микроскопа, содержащее основание (1), СЗМ головку (2), оснащенную первой опорой (3), второй опорой (4), третьей опорой (5), при этом первая опора (3) сопряжена с основанием (1) и снабжена первым приводом (6), установленным на СЗМ головке (2), а вторая опора (4) и третья опора (5) также сопряжены с основанием (1), отличающееся тем, что вторая опора (4) снабжена вторым приводом (7), установленным на СЗМ головке (2), и третья опора (5) снабжена третьим приводом (8), установленным на СЗМ головке (2).
2. Устройство по п. 1, отличающееся тем, что первый привод (6), второй привод (7) и третий привод (8) содержат передаточный механизм (30), обеспечивающий поступательное перемещение первой опоры (3), второй опоры (4) и третьей опоры (5).
3. Устройство по п. 1, отличающееся тем, что первый привод (6), второй привод (7) и третий привод (8) содержат модуль измерения перемещения (39).
4. Устройство по п. 1, отличающееся тем, что первый привод (6), второй привод (7) и третий привод (8) содержат датчики крайних положений (40).
5. Устройство по п. 1, отличающееся тем, что корпус (25) первого привода (6), второго привода (7) и третьего привода (8) выполнены из титана.
6. Устройство по п. 1, отличающееся тем, что в него введен теплоотводящий модуль (53), сопряженный с мотором (50).
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2161343C2 |
| WO 2014090971 A1, 19.06.2014 | |||
| US 5801472 A1, 01.09.1998 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| US 6018991 A1, 01.02.2000. | |||

