Изобретение относится к устройствам контроля положения рабочих органов ножевого, клинового, ковшового (экскаваторного) и навесного типов бульдозеров, рыхлителей, погрузчиков, автогрейдеров, скреперов, грейдер-элеваторов, грунторезных машин, экскаваторов и других землеройно-транспортных и дорожно-строительных машин на гусеничном или пневмоколесном ходу.
Известна система автоматической стабилизации поперечного наклона рабочего органа автогрейдера относительно горизонта, содержащая датчик углового положения, установленный на основной раме автогрейдера, и шарнирно-сочлененную рычажную систему, связанную с датчиком угла наклона (поворота) тяговой рамы с рабочим органом (отвалом) автогрейдера [1].
Недостатком этого устройства является невозможность определения высотных отметок режущей кромки рабочего органа автогрейдера и, соответственно, высотных отметок обрабатываемой поверхности.
Этого недостатка не имеет система определения положения режущей кромки рабочего органа автогрейдера, реализованная с использованием системы спутниковой навигации (GNSS) и датчиков перемещения штоков гидроцилиндров устройства подвеса тяговой рамы. В этой системе с помощью приемников и антенн GNSS, жестко установленных на основной раме автогрейдера, определяется положение автогрейдера в системе координат, связанной с местностью. Затем с помощью счетно-решающего устройства и датчиков перемещения по заданному алгоритму определяются координаты точек на режущей кромке рабочего органа в системе координат, связанной с местностью. Это позволяет определить положение режущей кромки рабочего органа автогрейдера и текущее значение высотных отметок и углов наклона обрабатываемой поверхности в системе координат, связанной с окружающей местностью [2].
Недостатком этого устройства является его пониженная надежность, что обусловлено наличием сложных по конструкции датчиков перемещения и возможностью их повреждения при размещении этих датчиков снаружи гидроцилиндров привода перемещения рабочего органа.
Наиболее близким к предложенному является устройство определения положения режущей кромки рабочего органа машины (автогрейдера), которое также содержит счетно-решающее устройство (вычислитель) и систему спутниковой навигации, но вместо датчиков перемещения штоков гидроцилиндров в этом устройстве установлены датчики углов поворота - тангажа, крена и курса (рыскания) тяговой рамы относительно основной рамы машины. Счетно-решающее устройство приспособлено для преобразования выходных сигналов углов поворота в координаты точек режущей кромки рабочего органа машины в системе координат, связанной с машиной. Приемники и антенны GNSS, жестко установленные на основной раме машины, приспособлены для определения положения машины в системе координат, связанной с местностью. Счетно-решающее устройство дополнительно приспособлено для определения положения рабочего органа на местности путем преобразования данных о положении его режущей кромки относительно машины в систему координат, связанную с местностью, с использованием данных о положении машины на местности и порядка (формул, уравнений) этого пересчета, установленного в зависимости от параметров и конструкции машины, рабочего органа и узлов его присоединения к ней [3].
В известном устройстве обеспечивается определение текущих отклонений режущей кромки рабочего органа от заданных высотных отметок обрабатываемой поверхности.
Его недостатком является невысокая точность определения положения рабочего органа и пониженная эксплуатационная надежность. Это обусловлено применением в известном устройстве механических датчиков углов поворота, установленных соосно осям шарниров узлов крепления рабочего органа.
В процессе работы машины происходит механический износ шарниров. Образующиеся при этом люфты и зазоры нарушают соосность датчиков углов и осей шарниров, что приводит к возникновению погрешности измерения углов и, соответственно, положения рабочего органа. Расположение датчиков непосредственно на шарнирах приводит к снижению эксплуатационной надежности устройства ввиду невозможности обеспечить эффективную защиту от механических повреждений как самих датчиков, так и электрических жгутов, используемых для их подключения к счетно-решающему устройству (вычислителю).
Техническим результатом, на достижение которого направлено заявленное изобретение, является повышение точности определения положения рабочего органа машины при одновременном повышении эксплуатационной надежности устройства для определения этого положения.
В устройстве для определения положения рабочего органа землеройно-транспортной или дорожно-строительной машины, содержащем по меньшей мере два измерителя, один из которых установлен на машине, а второй на рабочем органе или на детали, приспособленной для подвижного соединения рабочего органа с машиной, и вычислитель, соединенный с этими измерителями, указанный технический результат достигается за счет того, что каждый измеритель содержит по меньшей мере один гироскоп, и/или акселерометр, и/или магнитометр и выполнен с возможностью измерения углового положения и/или перемещения места его установки в системе координат, связанной с местностью, а вычислитель выполнен с возможностью определения положения рабочего органа относительно машины или местности с использованием измеренных угловых положений, и/или перемещений, и/или их разности.
С целью улучшения технических характеристик, расширения области применения, а также более эффективного достижения указанного технического результата в частных вариантах реализации предложенного устройства для определения положения рабочего органа машины:
а) вычислитель определяет положение рабочего органа относительно машины с использованием функциональных зависимостей этого положения от выходных сигналов измерителей, предварительно определенных с учетом параметров и конструкции машины, рабочего органа, узлов подвижного присоединения рабочего органа к машине и записанных в энергонезависимую память вычислителя;
б) вычислитель приспособлен для выполнения тригонометрических расчетов при определении положения рабочего органа относительно машины;
в) измерители содержат трехосевые гироскопы и акселерометры и/или магнитометры, причем микроконтроллер, установленный в измерителе (измерителях) или вычислителе, приспособлен для определения углового положения измерителя путем интегрирования выходных сигналов гироскопа и коррекции или устранения дрейфа интеграторов с использованием сигналов акселерометра и/или магнитометра, и/или приспособлен для определения линейного перемещения измерителя путем двойного интегрирования сигналов ускорения в соответствующем направлении;
г) вычислитель или микроконтроллер измерителя осуществляет коррекцию результатов интегрирования сигналов гироскопов и/или акселерометров путем реализации цифрового рекурсивного фильтра с использованием вероятностной динамической модели движения рабочего органа;
д) каждый измеритель оснащен средством виброзащиты и/или термостатирования гироскопа, и/или акселерометра, и/или магнитометра;
е) вычислитель соединен с датчиком положения органа управления положением рабочего органа и/или с устройством управления его приводом рабочего органа и приспособлен для устранения дрейфа интеграторов из условия предотвращения изменения разности формируемых измерителями сигналов угловых положений и/или перемещений рабочего органа в те интервалы времени, в которых отсутствует сигнал управления его перемещением;
ж) устройство дополнительно содержит приемник GNSS, установленный на машине и соединенный с вычислителем, который приспособлен для определения положения рабочего органа в системе координат, связанной с местностью, с использованием выходных сигналов этого приемника и данных о положении рабочего органа относительно машины;
з) устройство дополнительно содержит средство беспроводной связи, входящее в состав вычислителя или соединенное с ним и приспособленное для приема сигналов координат или поправок с базового стационарно установленного приемника GNSS, а вычислитель или приемник GNSS, установленный на машине, приспособлен для определения местоположения машины с учетом этих координат или поправок;
и) приемник GNSS, установленный на машине, и базовый приемник GNSS выполнены с возможностью измерения фаз несущей сигналов GNSS, а вычислитель или приемник GNSS, установленный на машине, выполнен с возможностью определения местоположения машины с учетом результатов измерения этих фаз;
к) устройство дополнительно содержит интерфейсное устройство, приспособленное для передачи данных о положении рабочего органа в систему управления машиной, и/или средство беспроводной связи, обеспечивающее возможность приема данных о проектном уровне или цифровой модели проекта грунтовой поверхности со стационарного поста, передачи данных о положении рабочего органа на стационарный пост и/или обмена данными о положениях рабочих органов двух и более совместно работающих машин;
л) устройство дополнительно оснащено панелью оператора, соединенной с вычислителем или входящей в его состав и обеспечивающей отображение информации о положении рабочего органа машины и/или о проектном уровне, или проектной плоскости грунтовой поверхности одновременно с положением машины на этой поверхности. Панель оператора может содержать органы управления, обеспечивающие возможность введения оператором в вычислитель проектных значений уклонов грунтовой поверхности, толщины срезаемого слоя грунта, параметров проектной плоскости грунтовой поверхности, а также установки оператором параметров начального положения рабочего органа.
При реализации указанных отличительных признаков предложенного изобретения, в том числе различных альтернативных признаков в их любом сочетании, определение положения рабочего органа относительно машины осуществляется путем определения разности положений рабочего органа и самой машины в системе координат, связанной с местностью. Благодаря этому исключается необходимость установки измерителей в узлах шарнирного присоединения рабочего органа к машине. Отсутствие механических связей в измерителях позволяет исключить влияние люфтов и зазоров в механических соединениях, что приводит к повышению точности измерения положения рабочего органа. Одновременно открывается возможность установки измерителей в любых точках рабочего органа и деталей его шарнирного присоединения к машине, в том числе в местах, наименее подверженных воздействию грунта и иных предметов при работе машины. Благодаря этому обеспечивается эффективная защита измерителей и соединительных электрических кабелей от механических повреждений и соответствующее повышение эксплуатационной надежности устройства. К этому же техническому результату приводит упрощение конструкции измерителей, обусловленное отсутствием механических передач в этих измерителях. Поэтому эти отличительные признаки находятся в прямой причинно-следственной связи с достижением указанного технического результата.
Причинно-следственная связь между реализацией отличительных признаков изобретения и достигаемым техническим результатом дополнительно показана также при описании работы предложенного устройства.
На чертеже представлен пример реализации устройства для определения положения рабочего органа землеройно-транспортной или дорожно-строительной машины.
Устройство содержит вычислитель 1, не менее двух измерителей 2, 3, приемник глобальной спутниковой системы позиционирования (GNSS) 4 и панель оператора 5.
Рабочие органы землеройно-транспортных и дорожно-строительных машин, для определения положения которых предназначено данное устройство, могут быть выполнены в виде зуба на стойке для рыхления разрабатываемой среды, ковша определенной вместимости со сплошной режущей кромкой или оснащенной зубьями, отвала, снабженного в нижней части режущими ножами, и т.д. Землеройные функции рабочих органов могут быть совмещены с транспортирующими. Машины в этом случае оснащаются ковшами (экскаваторы, скреперы) или отвалами (бульдозеры, грейдеры). Для нарезания щелей может использоваться баровые, цепные и дискофрезерные рабочие органы, навешиваемые на тракторы или на траншейные экскаваторы (вместо основного рабочего органа).
Один из измерителей 2, в зависимости от конструкции машины и ее рабочего органа, размещен на рабочем органе (ковше, отвале и т.д.) или на детали, приспособленной для подвижного соединения рабочего органа с машиной (на стойке, стреле, раме, толкающем брусе и т.д.). Второй измеритель 3 установлен на машине.
Вычислитель 1 может именоваться также контроллером, электронным блоком, измерительным или информационно-измерительным блоком и т.п. Он реализован преимущественно на основе программируемого микроконтроллера или цифрового сигнального процессора и содержит интерфейсные схемы, встроенное энергонезависимое запоминающее устройство (блок памяти), устройства его электрического питания, защиты от внешних воздействий и т.п.
В состав устройства может входить средство беспроводной связи 6, соединенное с вычислителем 1 и обеспечивающее обмен информацией со стационарным постом 7 или с аналогичным средством связи (приемопередатчиком), расположенным на другой машине.
Измерители 2, 3 могут именоваться также датчиками, инерциальными измерителями, устройствами измерения параметров движения и т.п. Каждый из них в общем случае содержит трехосевой микромеханический гироскоп, трехосевой микромеханический акселерометр, трехосевой магнитометр и микроконтроллер для цифровой обработки их сигналов.
Микромеханический гироскоп не содержит вращающихся частей и является гироскопом вибрационного типа, основанным на контроле ускорения Кориолиса. Фактически он является датчиком угловой скорости.
Угловое положение рабочего органа и машины определяется путем цифрового интегрирования сигналов гироскопов. Скорости линейных перемещений рабочего органа и машины определяются путем интегрирования сигналов акселерометра, а линейные перемещения - путем их двойного интегрирования.
Для установки начальных значений и коррекции дрейфа цифровых интеграторов измерителей 2, 3 используются акселерометры, магнитометры и/или приемник GNSS (Navstar-GPS, ГЛОНАСС, Galileo, Beidou и т.п.) 4. Для такой коррекции может быть использована Калмановская фильтрация и вероятностная динамическая модель движения рабочего органа или машины в целом. Установка начальных значений положения рабочего органа и коррекция дрейфа результатов измерения этого положения могут осуществляться также оператором с использованием органов управления, расположенных на панели оператора 5.
Панель оператора 5 содержит, преимущественно, цветной графический дисплей, звуковые и световые сигнализаторы и органы управления - кнопки, клавиши и т.п. Вместе графического дисплея может быть применен набор световых сигнализаторов, цифровых или стрелочных электромеханических индикаторов.
Если машина имеет два или более рабочих органа, то на каждом из них или на какой-либо детали его шарнирного крепления к машине (навешивания на машину) устанавливается дополнительный измеритель 8, соединенный с вычислителем 1.
Каждый измеритель, с целью повышения точности измерений, может быть оснащен средством виброзащиты, т.е. закреплен на машине или на рабочем органе с помощью амортизаторов. Может быть также реализовано термостатирование гироскопа, акселерометра и/или магнитометра, входящего в его состав.
Допустимые варианты исполнения различных составных частей устройства, в том числе количество и расположение измерителей, зависят от конструкции землеройно-транспортной или дорожно-строительной машины, на которой используется это устройство, от требований к системе управления этой машины, условий ее эксплуатации и особенностей выполняемых технологических процессов.
Соединение составных частей устройства между собой и с системой управления машиной может быть реализовано с использованием отдельных проводов, как это показано на чертеже, мультиплексной линии связи (CAN, LIN, RS-485 и т.д.), беспроводных линий связи (ZigBee, Wi-Fi и т.д.) или их комбинации.
Устройство для определения положения рабочего органа землеройно-транспортных и дорожно-строительных машин работает следующим образом.
Вычислитель 1 и измерители 2, 3 и 8 реализуют бесплатформенную инерциальную навигационную систему.
Эти измерители и, соответственно, гироскопы, акселерометры и магнитометры, входящие в их состав, устанавливаются непосредственно на машину, на рабочий орган или на детали его подвижного присоединения к машине. Их установка осуществляется в произвольных положениях, которые выбираются из условия простоты монтажа и обеспечения эффективной защиты измерителей и соединительных кабелей от механических повреждений в процессе эксплуатации машины. Соответственно, оси чувствительности гироскопов, акселерометров и магнитометров (оси локальной системы координат измерителей) в общем случае не совпадают с осями симметрии машины и ее рабочего органа, направлениями их перемещений, а также с осями выбранной системы координат, связанной с машиной или с окружающей местностью - Землей (локальной или геоцентрической системы координат).
Поскольку ускорение свободного падения g - это вектор, то для того, чтобы учесть его значение в полном векторе ускорения, который выдает акселерометр измерителя по трем осям, нужно знать его направление в локальной системе координат каждого измерителя. Для этого при первоначальной настройке устройства или по команде оператора, формируемой с помощью панели оператора 5, в те моменты времени, когда движение машины и рабочего органа отсутствует, вычислитель 1 по направлению ускорения g определяет направление вертикали в локальной системе координат каждого измерителя и реализует процедуру автонастройки, которая позволяет выровнять (определить) вертикальную ось локальной системы координат каждого измерителя 2, 3, 8 по измеренному вектору ускорения g.
Далее с помощью магнитометра и гироскопа определяются и записываются в память микроконтроллера вычислителя 1 начальное значение азимута (угла рыскания) и горизонтальная скорость вращения Земли (около 0,25° в минуту).
В памяти вычислителя 1 записаны также матрицы перехода, содержащие тригонометрические функции. Вычислитель 1 при решении навигационной задачи определяет углы, устоявшиеся названия которых - тангаж, крен, рыскание, реализуя любой из трех известных способов их подсчета с использованием различных кинематических параметров: углов Эйлера-Крылова, направляющих косинусов, параметров Родрига-Гамильтона (кватернионов).
Ориентация локальной системы координат каждого измерителя (базиса, связанного с осями чувствительности гироскопов, акселерометров и магнитометров), рассчитывается встроенными микроконтроллерами измерителей 2, 3 и 8 или вычислителем 1 через интегрирование показаний гироскопов (датчиков угловой скорости).
Линейные перемещения измерителей 2, 3 и 8 (конструктивных элементов машины, рабочего органа или деталей шарнирного крепления рабочего органа, к которым прикреплены измерители) определяются путем двойного интегрирования линейных ускорений, измеряемых акселерометрами, с предварительным вычитанием ускорения свободного падения g. Поскольку оси чувствительности акселерометров не совпадают с осями выбранной системы координат, вычислитель 1 или микроконтроллер измерителя, предварительно определив угловое положение этих измерителей, перед интегрированием отделяет проекции силы тяжести от инерционных составляющих выходных сигналов акселерометров.
Гироскопы и акселерометры имеют смещение и дрейф нуля, неперпендикулярность осей, обладают нелинейностью и погрешностью масштабного коэффициента (чувствительности). При этом ошибки накапливаются со временем из-за того, что вычислителем 1 осуществляется интегрирование всех входных данных, включая ошибки.
Коррекция на базе фильтра Калмана, реализуемая вычислителем 1, обеспечивает калибровку гироскопов и определение характеристик их текущего смещения. Акселерометры, используя земную гравитацию, выдают вычислителю 1 опорную информацию о пространственном положении каждого измерителя, используемую для коррекции результатов измерения его углового положения путем компенсации дрейфа гироскопов, в том числе во время движения машины и рабочего органа. С аналогичной целью используются магнитометры, измеряющие угол между вектором магнитного поля Земли и осью их чувствительности (плоскостью установки измерителей). Магнитометры необходимы для коррекции результатов измерения угла поворота машины или рабочего органа вокруг вертикальной оси, т.е. вдоль направления ускорения свободного падения, не выявляемого акселерометрами.
Для коррекции результатов измерения линейного перемещения и положения машины, полученных с помощью гироскопов и акселерометров измерителей 2, 3 и 8, может также использоваться выходной сигнал приемника сигналов GNSS (Navstar-GPS, ГЛОНАСС, Galileo, Beidou и т.п.) 4. Во время движения машины с помощью этого приемника возможно также получение данных о направлении и скорости движения машины и их дальнейшее использования вычислителем 1 для коррекции выходных сигналов измерителей 2, 3 и 8.
Еще одним вариантом реализуемого в устройстве способа снижения дрейфа выходного сигнала интеграторов является блокирование изменения выходных сигналов этих интеграторов или разности этих сигналов в те интервалы времени, в которых рабочий орган заведомо неподвижен. Для этого используется соединение вычислителя 1 с датчиком положения органа управления положением рабочего органа и/или с устройством управления его приводом (на чертеже условно не показано).
В предложенном устройстве, в зависимости от требований к технологическому процессу, выполняемому землеройно-транспортной или дорожно-строительной машиной, а также требований к ее системе управления, положение рабочего органа определяется относительно машины (в системе координат, связанной с машиной), либо относительно Земли в локальной или геоцентрической системе, т.е. в системе координат, связанной с местностью.
При практической реализации устройств, соответствующих различным альтернативным признакам изобретения, целесообразно отдавать предпочтение измерению положения рабочего органа через изменение угловых положений либо самого рабочего органа, либо какой-либо детали его подвижного соединения с машиной. Такая возможность может отсутствовать, если имеется лишь линейное перемещение рабочего органа, например с помощью гидравлических цилиндров его привода. В этом случае величина перемещения рабочего органа определяется путем двойного интегрирования сигналов ускорения в соответствующем направлении с одновременной реализацией описанных выше мер компенсации погрешности (дрейфа) интеграторов.
Определение углового положения или линейного перемещения рабочего органа в системе координат, связанной с окружающей местностью (Землей), осуществляется с помощью измерителя 2 или 8.
Если же это положение, в зависимости от требований к системе управления или к технологическому процессу, выполняемому машиной, требуется определить относительно машины, то вычислитель 1 определяет положение рабочего органа относительно центра тяжести или центра вращения поворотной части машины (например, экскаватора) с использованием функциональных зависимостей этого положения от выходных сигналов измерителей 2 (8) и 3. В основе алгоритма такого определения лежат тригонометрические расчеты. Для их проведения с помощью измерителя 2 или 8 определяются текущие значения углов поворота элементов рабочего органа (стрелы, отвала, ковша и т.п.) и/или деталей его шарнирного крепления к машине (например, толкающего бруса бульдозера). Исходные (начальные) значения этих углов определяются при установке устройства на машину и записываются в память вычислителя 1, например, оператором с помощью органа управления, расположенного на панели оператора 5. В памяти вычислителя 1 предварительно записаны расстояния между осями вращения этих элементов в вертикальной и горизонтальной плоскостях. При работе машины вычислитель 1, используя определяемые измерителями 2 (8) и 3 значения углов поворота и данные о расстояниях между осями поворота, путем тригонометрических расчетов определяет угловое и/или линейное положение рабочего органа относительно машины. При необходимости, с учетом его начального положения.
Если требуется определение положения рабочего органа относительно местности (Земли), то вычислитель 1 дополнительно осуществляет пересчет полученных координат положения рабочего органа с использованием приемника GNSS, установленного на машине.
С целью повышения точности определения положения рабочего органа в системе координат, связанной с Землей, может быть использован дифференциальный режим работы GNSS. В этом случае в вычислитель 1 с базового стационарно установленного приемника GNSS с помощью средства беспроводной связи 6 передаются координаты местоположения базового приемника или сигналы поправок DGPS. Например, с использованием стандарта пересылки поправок RTCM SC - 104.
Для получения сантиметровой точности определения положения рабочего органа может быть реализовано формирование поправок DGPS с использованием режима измерения фаз несущей F1, F2 сигналов GNSS базового приемника и приемника 4, установленного на машине.
В процессе работы машины данные о положении рабочего органа и, в случае необходимости, о положении машины отображаются на панели оператора 5.
Дополнительно с помощью средства связи 6 или оператором с помощью органов управления, расположенных на панели оператора 5, в вычислитель 1 вводятся и далее отображаются на панели оператора 5 проектные значения уклонов грунтовой поверхности, толщины срезаемого слоя грунта, параметры проектной плоскости грунтовой поверхности (в частности, в виде цифровой 3D-модели), а также установки параметров начального положения рабочего органа и/или машины.
Благодаря тому что оператор имеет возможность сравнения отображаемых действительного и проектного положений рабочего органа, обеспечивается возможность реализация автоматизированного управления положением рабочего органа.
При таком управлении с помощью панели оператора 5 может дополнительно осуществляться отображение положения машины на плоской или объемной грунтовой поверхности одновременно с отображением проектной поверхности грунта, отображение параметров движения машины и разрешенной зоны работы машины, а также формирование предупреждающих информационных сигналов для оператора.
При наличии на машине системы автоматического управления положением рабочего органа вычислитель 1 передает в эту систему данные о положении рабочего органа с помощью интерфейсного устройства, входящего в состав вычислителя 1.
С помощью средства связи 6 возможна также реализация группового автоматического управления группой машин, например, их синхронная работа, а также дистанционный контроль за работой машины со стационарного поста.
Изобретение не ограничивается рассмотренными вариантами его осуществления. Специалистам в данной области техники понятно, что самые разные изменения и модификации этих вариантов могут быть выполнены в пределах объема прилагаемой формулы изобретения.
Источники информации
1. SU 1481344 A, E02F 9/20, 23.05.1989.
2. RU 2469151 C1, E02F 9/20, 10.12.2012.
3. RU 2478757 C1, 10.04.2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2568695C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВАМИ ДЛЯ ЕЕ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2569711C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| ТРАКТОРНЫЙ АГРЕГАТ С СИСТЕМОЙ ОГРАНИЧЕНИЯ ДОСТУПА К ЕГО УПРАВЛЕНИЮ | 2014 |
|
RU2557107C1 |
| Устройство регистрации двигательной активности | 2016 |
|
RU2663396C2 |
| ТРАКТОР С РЕГИСТРАТОРОМ ПАРАМЕТРОВ | 2014 |
|
RU2542571C1 |
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
Изобретение относится к устройствам контроля положения рабочих органов землеройно-транспортных и дорожно-строительных машин. Устройство содержит цифровой вычислитель и по меньшей мере два измерителя, один из которых установлен на машине, а второй на рабочем органе или детали, приспособленной для подвижного соединения рабочего органа с машиной. Каждый измеритель содержит гироскоп, акселерометр и/или магнитометр и обеспечивает возможность измерения углового положения и/или перемещения места его установки в системе координат, связанной с местностью. Вычислитель определяет положение рабочего органа относительно машины или местности с использованием измеренных угловых положений, перемещений и/или их разности. Устройство в частных вариантах его реализации оснащено приемником GPS/ГЛОНАСС, панелью оператора, средством беспроводной связи и реализует функции, обеспечивающие повышение точности определения положения рабочего органа, улучшение технических характеристик и расширение области применения устройства. Изобретение обеспечивает повышение точности определения положения рабочего органа машины. 4 з.п. ф-лы, 1 ил.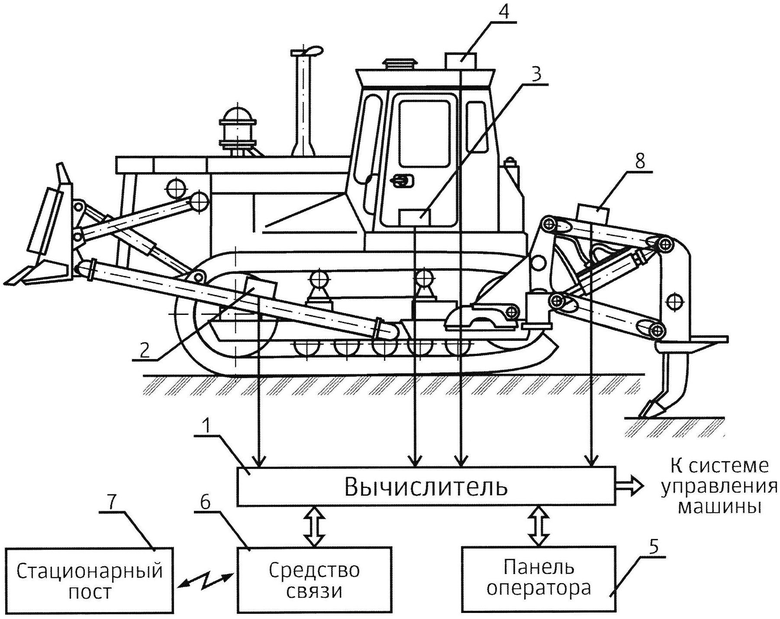
1. Устройство для определения положения рабочего органа машины, содержащее по меньшей мере два измерителя, один из которых установлен на машине, а второй на рабочем органе или на детали, приспособленной для подвижного соединения рабочего органа с машиной, и вычислитель, соединенный с указанными измерителями, причем каждый измеритель содержит по меньшей мере один гироскоп, и/или акселерометр, и/или магнитометр, а также выполнен с возможностью измерения углового положения и/или перемещения места его установки в системе координат, связанной с местностью, а вычислитель выполнен с возможностью определения положения рабочего органа относительно машины или местности с использованием измеренных угловых положений, и/или перемещений, и/или их разности, отличающееся тем, что в этом устройстве дополнительно реализовано по меньшей мере одно из следующих технических решений:
а) вычислитель выполнен с возможностью определения положения рабочего органа относительно машины с использованием функциональных зависимостей этого положения от выходных сигналов измерителей, причем эти функциональные зависимости предварительно определены с учетом параметров и конструкции машины, и/или рабочего органа, и/или узлов подвижного присоединения рабочего органа к машине и записаны в энергонезависимую память вычислителя;
б) каждый измеритель содержит трехосевой гироскоп, а также трехосевой акселерометр и/или трехосевой магнитометр, выполненный с возможностью измерения магнитного поля Земли, причем по меньшей мере один микроконтроллер, установленный в измерителе и/или в вычислителе, приспособлен для определения углового положения измерителя путем интегрирования выходных сигналов гироскопа и коррекции или устранения дрейфа интеграторов с использованием сигналов акселерометра и/или магнитометра и/или приспособлен для определения линейного перемещения измерителя путем двойного интегрирования сигналов ускорения в соответствующем направлении;
в) вычислитель или микроконтроллер измерителя выполнен с возможностью коррекции результатов интегрирования сигналов гироскопов и/или акселерометров путем реализации цифрового рекурсивного фильтра с использованием вероятностной динамической модели движения рабочего органа;
г) вычислитель дополнительно соединен по меньшей мере с одним датчиком положения органа управления положением рабочего органа и/или с устройством управления приводом рабочего органа, а также приспособлен для устранения дрейфа интеграторов из условия предотвращения изменения разности формируемых измерителями сигналов угловых положений и/или перемещений рабочего органа в те интервалы времени, в которых отсутствует сигнал управления его перемещением;
д) измеритель оснащен средством виброзащиты и/или термостатирования гироскопа, и/или акселерометра, и/или магнитометра;
е) устройство дополнительно содержит средство беспроводной связи, входящее в состав вычислителя или соединенное с ним и приспособленное для приема сигналов координат или поправок с базового стационарно установленного приемника глобальной спутниковой системы позиционирования, а вычислитель или приемник глобальной спутниковой системы позиционирования, установленный на машине, приспособлен для определения местоположения машины с учетом этих координат или поправок;
ж) устройство дополнительно содержит интерфейсное устройство, приспособленное для передачи данных о положении рабочего органа в систему управления машиной, и/или средство беспроводной связи, приспособленное для приема данных о проектном уровне или цифровой модели проекта грунтовой поверхности со стационарного поста, и/или для передачи данных о положении рабочего органа на стационарный пост, и/или для обмена данными о положениях рабочих органов двух и более совместно работающих машин, причем указанное интерфейсное устройство и/или средство беспроводной связи входит/входят в состав вычислителя или соединено/соединены с ним;
з) устройство дополнительно оснащено панелью оператора, которая соединена с вычислителем или входит в его состав и приспособлена для отображения информации о положении рабочего органа машины, и/или о проектном уровне или проектной плоскости грунтовой поверхности одновременно с положением машины на этой поверхности или относительно этой поверхности.
2. Устройство по п. 1, отличающееся тем, что вычислитель выполнен с возможностью выполнения тригонометрических расчетов при определении положения рабочего органа относительно машины.
3. Устройство по п. 1, отличающееся тем, что оно дополнительно содержит приемник глобальной спутниковой системы позиционирования, установленный на машине и соединенный с вычислителем, который приспособлен для определения положения рабочего органа в системе координат, связанной с местностью, с использованием выходных сигналов этого приемника и данных о положении рабочего органа относительно машины.
4. Устройство по п. 3, отличающееся тем, что приемник глобальной спутниковой системы позиционирования, установленный на машине, и базовый приемник выполнены с возможностью измерения фаз несущей сигналов глобальной спутниковой системы позиционирования, а вычислитель или приемник глобальной спутниковой системы позиционирования, установленный на машине, выполнен с возможностью определения местоположения машины с учетом результатов измерения этих фаз.
5. Устройство по п. 1, отличающееся тем, что панель оператора содержит органы управления и выполнена с возможностью введения оператором в вычислитель проектного значения продольного и/или поперечного уклона грунтовой поверхности, и/или толщины срезаемого слоя грунта, и/или параметров проектной плоскости грунтовой поверхности, и/или установки оператором параметров начального положения рабочего органа.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЕЖУЩЕЙ КРОМКИ ОТВАЛА АВТОГРЕЙДЕРА | 2011 |
|
RU2478757C2 |
| Способ обработки буковой древесины для пивных бочек | 1952 |
|
SU94219A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2116025C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| US 2011118083 A1, 19.05.2011 | |||
| US 2003221845 A1, 12.04.2003 | |||

