Изобретение относится к способам управления скоростью транспортного средства с двигателем внутреннего сгорания и механической коробкой передач, использующим круиз-контроль, который поддерживает скорость транспортного средства с учетом скорости его движения и частоты вращения коленчатого вала.
Известен способ управления скоростью, в котором транспортное средство включает в себя двигатель внутреннего сгорания, снабжающий энергией автомобиль в режиме круиз-контроля. Поддержание скорости транспортного средства с механической коробкой передач и механической педалью акселератора заключается в том, что при нажатии кнопки «ON» на панели круиз-контроля микроконтроллер по записанной в нем программе инициализирует опрос датчика скорости, текущее значение которого записывается в его память.
По нажатию кнопки «SET» на пульте управления круиз-контроля текущее значение скорости транспортного средства сравнивается с записанным в памяти микроконтроллера. После отпускания педали акселератора микроконтроллер выдает сигналы управления, пропорциональные рассогласованию текущей и сохраненной в памяти скорости, которые поступают на драйвер управления двигателем. С выхода драйвера напряжение заданного уровня и заданной полярности поступает на электрический двигатель постоянного тока, тросиковый механизм которого связан с тросиком педали акселератора, и изменяет (увеличивая или уменьшая) его натяжение, обеспечивая поддержание сохраненной в памяти микроконтроллера скорости транспортного средства.
К недостаткам способа следует отнести отсутствие информации о частоте вращения коленчатого вала двигателя, что при механической коробке передач может привести к его повреждению в режиме круиз-контроля.
Задачей изобретения является разработка оптимального способа поддержания скорости транспортного средства с двигателем внутреннего сгорания и механической коробкой передач, использующего круиз-контроль, который поддерживает заданную скорость транспортного средства с учетом не только скорости движения, но и частоты вращения коленчатого вала.
Для решения задачи изобретения предлагается использовать микроконтроллерную систему, программное обеспечение которой учитывает значения скорости движения автомобиля и частоты вращения коленчатого вала, дающую возможность оптимального поддержания скорости движения автомобиля с механической коробкой передач, не выводя частоту оборотов двигателя за допустимые пределы в различных условиях дорожной обстановки.
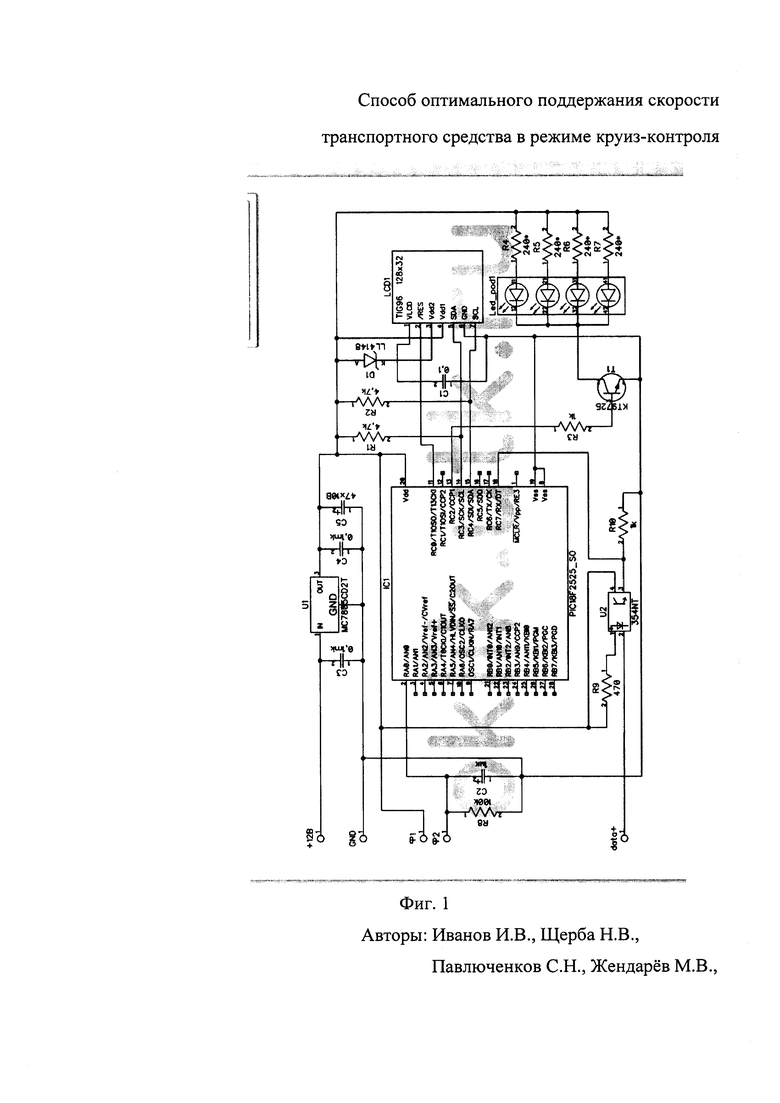
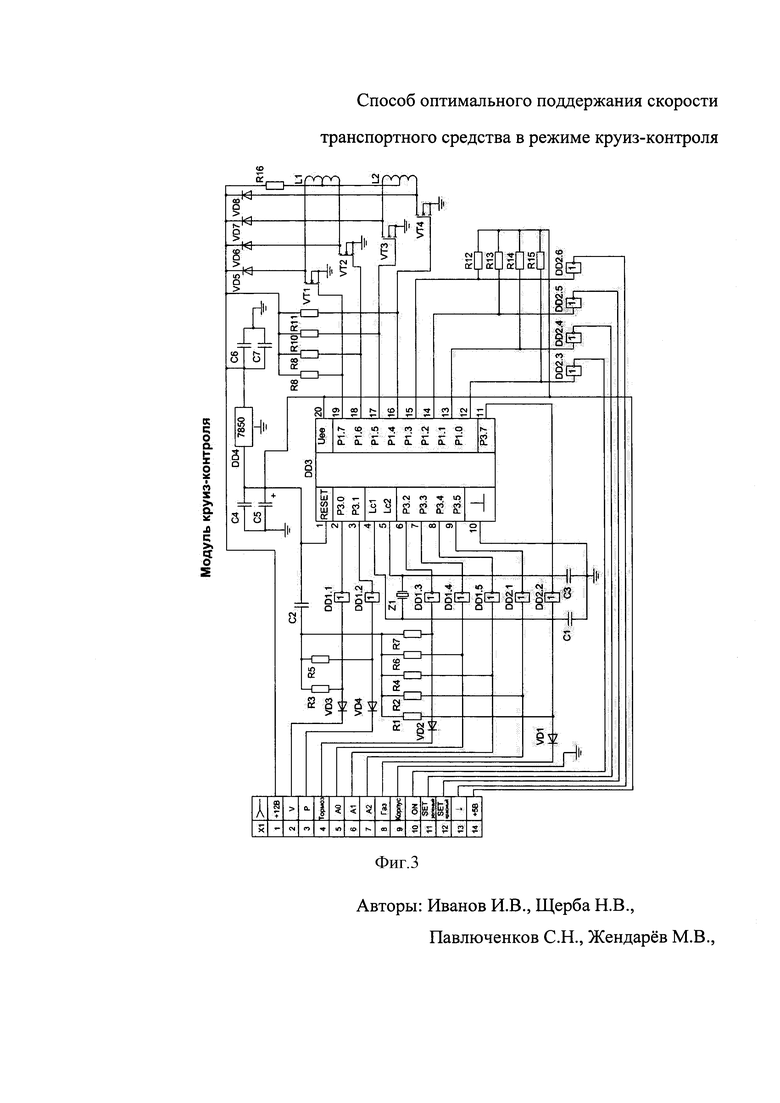
При включении зажигания питающее напряжение 12В от бортовой сети автомобиля через контакт 1 разъема X1 основного блока круиз-контроля поступает на контакты питания шагового двигателя (катушки L1 и L2) через ограничивающий ток резистор R16; через резисторы R12-R15 на затворы управляющих шаговым двигателем транзисторов VT1-VT4, переводя их в закрытое состояние; на микросхему 7805. Преобразованное стабилизированное микросхемой 7805 напряжение 5В подается на контакты питания цифровых элементов (ИМС микроконтроллера DD3 (89АТС2051), инверторов DD1, DD2 (K155ЛН7)), а также для начального сброса и инициализации запуска программы на контакт «RESET» микроконтроллера DD3 (89АТС2051) через конденсатор С3.
При запуске программы микроконтроллер выдает через порт PI (Р1.7, Р1.6, Р1.5, Р1.4) четырехразрядные коды, которые, управляя затворами транзисторов VT1, VT2, VT3, VT4, обеспечивают принудительное ослабление тросика шагового двигателя круиз-контроля, механически соединенного с тросиком педали акселератора автомобиля, исключая его влияние на подачу топлива в карбюратор (инжектор) двигателя при запуске. После ослабления тросика педали акселератора круиз-контроль переходит в режим ожидания команды включения «ON».
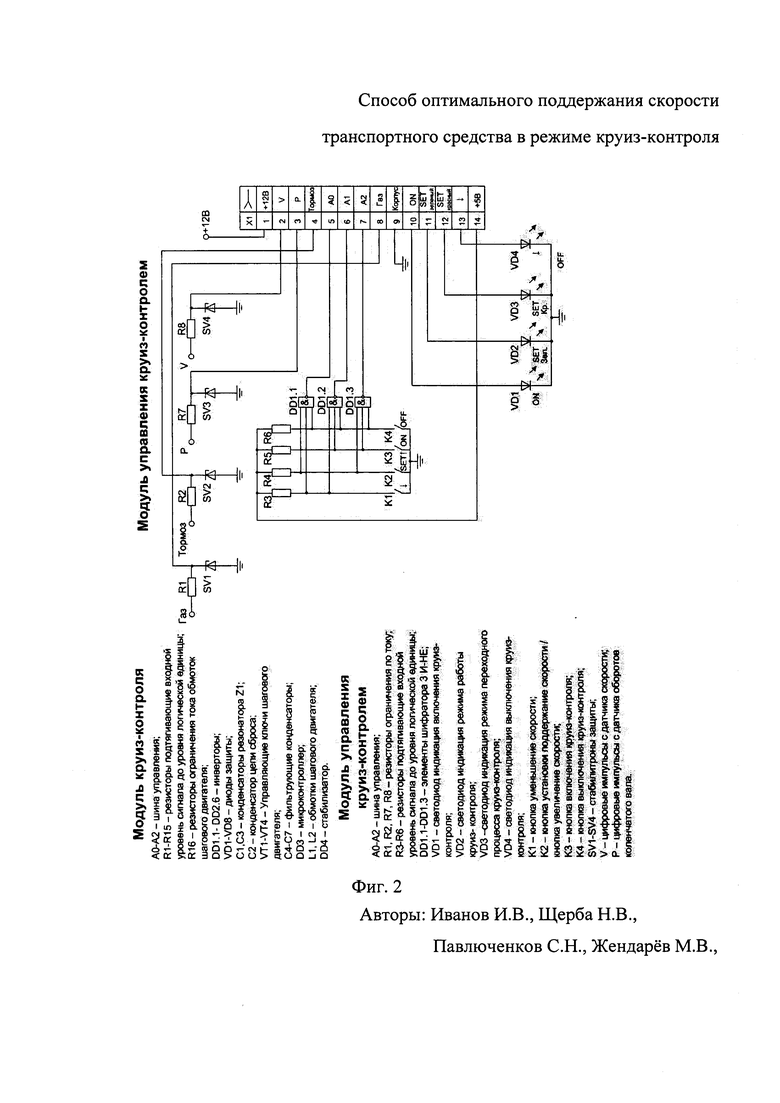
При движении автомобиля после поступления с пульта управления круиз-контроля управляющего сигнала «ON» по шине A1, А2 (контакты 6, 7 разъема X1) логические нули поступают на инверторы DD 1.6 и DD 2.1, с выходов которых логические единицы, являющиеся сигналами включения режима «ON», поступают на микроконтроллер (контакты 8, 9). В этом режиме с контактов 2, 3 разъема X1 сигналы с датчиков скорости и частоты вращения коленчатого вала через инверторы DD1.2 и DD1.1 поступают на контакты 2, 3 порта Р3 (Р3.0, Р3.1) микроконтроллера, который преобразует их в код, сохраняет его в ОЗУ, после чего выдает логическую единицу с контакта 12 (Р1.0) через DD2.3 на светодиод индикации включения режима «ON» и переходит в режим ожидания сигнала «SET».
После нажатия водителем кнопки «SET» на пульте управления круиз-контролем данные о текущей скорости и частоте вращения коленчатого вала двигателя переписываются из ОЗУ в регистры микроконтроллера. Сигнал «SET» с пульта управления круиз-контроля передается на основной блок по шине А0, А2 (контакты 5 и 7 разъема X1).
С контактов 5 и 7 логические уровни нуля через инверторы DD1.5 и DD2.1 преобразуются в логическую единицу и поступают на контакты 7, 9 порта Р3 (Р3.3 и Р3.5) микроконтроллера. По наличию сигналов в линиях порта Р3 (Р3.3 и Р3.5) микроконтроллера и сохраненной в регистрах информации в соответствии с программой выдаются четырехразрядные коды с линий порта P1 (Р1.4-Р1.7), управляющие вращением шагового двигателя в заданном направлении (натягивая (ослабляя) тросик акселератора), что увеличивает (уменьшает) уровень подачи топлива, поддерживая заданную скорость автомобиля. Индикация включения режима круиз-контроля обеспечивается подачей логического нуля с линии порта PI. 1 через инвертор DD2.4 и через контакт 11 разъема X1 на светодиод «SET» панели управления.
Контакт 4 разъема X1 подключается к педали тормоза, при нажатии на которую круиз-контроллер выходит из режима «SET».
Контакт 8 разъема X1 подключается к педали газа и предназначен для фиксирования нового значения скорости в случае ее увеличения.
Повторные нажатия на кнопку «SET» приводят к последовательному дискретному увеличению скорости.
После нажатия водителем кнопки уменьшения скорости «↓» (на пульте управления круиз-контролем по шинам А0, А1 (контакты 5,6 разъема X1) логические нули поступают на инверторы DD1.5 и DD1.6 и преобразуются в логические единицы на контактах 7, 8 порта Р3 (Р3.3 и Р3.4) микроконтроллера. При наличии двух единиц на контактах этих портов микроконтроллер дискретно уменьшает скорость автомобиля.
При нажатии водителем кнопки «OFF» на пульте управления круиз-контролем по шинам А0, A1, А2 логические нули через контакты 5, 6, 7 разъема X1 инверторами DD1.5, DD1.6, DD2.1 преобразуются в логические единицы и поступают на контакты 6, 7, 8 порта Р3 (Р3.3, Р3.4, Р3.5) микроконтроллера. Индикация круиз-контроля отключается.
В случае обрыва питания или информационных шин блока управления круиз-контролем на контактах 6, 7, 8 порта Р3 (Р3.3, Р3.4, Р3.5) устанавливаются значения логического нуля микроконтроллера и круиз-контроль автоматически переходит в режим «OFF».
Сущность предлагаемого способа заключается в том, что в отличие от известного способа управления скоростью транспортного средства с механической коробкой передач в режиме круиз-контроля микроконтроллером учитывается не только скорость движения транспортного средства, но и частота вращения коленчатого вала двигателя, текущие значения которых позволяют поддерживать выбранную скорость с учетом оптимального режима работы двигателя.
Работоспособность предложенного способа проверена в системе моделирования Proteus 7.7, где была смоделирована схема принципиальная электрическая «Оптимального способа поддержания скорости транспортного средства в режиме круиз-контроля». При моделировании управляемые в реальном масштабе времени генераторы импульсов имитировали сигналы датчиков скорости движения и частоты вращения коленчатого вала транспортного средства, поступающие через согласующие схемы в микроконтроллер АТ89С2051, в котором вырабатывался четырехразрядный код управления шаговым двигателем через транзисторные ключи. Для индикации процессов управления режимами работы круиз-контроля к выходам микроконтроллера через согласующие схемы подключались светодиоды.
Проведенное моделирование подтвердило работоспособность предложенного способа. Достоинством разработанного способа является возможность поддержания оптимального режима работы двигателя в режиме круиз-контроля в различных условиях эксплуатации.
Источники информации
1. Шило В.Л. Популярные цифровые микросхемы: Справочник. 2-е изд., испр. - Челябинск: Металлургия, Челябинское отд., 1989. - 352 с.
2. Прокопенко B.C. Программирование микроконтроллеров ATMEL на языке С. - К.: «МК-Пресс», СПб.: «КОРОНА-ВЕК», 2012. - 320 с.
3. Кенно Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. - М.: Энергоатомиздат, 1987. - 200 с.: ил.
4. Москаленко В.В. Системы автоматизированного управления электропривода: Учебник. - М.: ИНФРА-М, 2004. - 208 с.
5. http://scbist.com/stati-po-scb/3189-statya-sistema-avtomaticheskogo-regulirovaniya-skorosti.html
6. http://hardlock.org.ua/viewtopic.php?f=10&t=248
7. http://oklik.name/proect/kk/index.html
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления работой автомобильного дизеля в динамическом режиме самостоятельного холостого хода | 2019 |
|
RU2702445C1 |
| Способ изготовления устройства изменения скоростного режима дизеля, используемого при измерении дымности отработавших газов дизеля | 2024 |
|
RU2831952C1 |
| Способ измерения дымности отработавших газов автоматическим устройством скоростного режима дизеля | 2024 |
|
RU2828943C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2005 |
|
RU2298832C2 |
| ТРЕХЦИЛИНДРОВЫЙ ДВИГАТЕЛЬ С ОТКЛЮЧАЕМЫМ ЦИЛИНДРОМ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2012 |
|
RU2612544C2 |
| УСИЛИТЕЛЬ СИГНАЛА УВЕЛИЧЕНИЯ СКОРОСТИ / АВТОПИЛОТ ДЛЯ АВТОМОБИЛЕЙ, ПРОИЗВЕДЕННЫХ ПО НОВОЙ ТЕХНОЛОГИИ | 2006 |
|
RU2427481C2 |
| ИНТЕРФЕЙС ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ | 2016 |
|
RU2719042C1 |
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |
| ВРЕМЕННАЯ СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УСКОРЕННО ВОССТАНАВЛИВАЕМЫХ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕГОНАХ | 2019 |
|
RU2732636C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАПОЛНЕНИЕМ ДВИГАТЕЛЯ С ТУРБОНАДДУВОМ | 2014 |
|
RU2575235C1 |
Изобретение относится к способe оптимального поддержания скорости транспортного средства в режиме круиз-контроля. Способ заключается в том, что при нажатии кнопки «ON» на панели управления микроконтроллером по программе, записанной в нем, инициируется опрос датчика скорости, текущее значение которой записывается в память микроконтроллера и сравнивается с записанным значением скорости. После отпускания педали акселератора микроконтроллер выдает пропорциональные рассогласованию текущей и сохраненной скорости сигналы управления, поступающие на драйвер управления двигателем. Электрический двигатель постоянного тока, тросиковый механизм которого связан с тросиком педали акселератора, изменяет натяжение тросика педали акселератора, обеспечивая поддержание сохраненной в памяти микроконтроллера скорости транспортного средства. При нажатии кнопки «ON» импульсы с датчика скорости и тахометра поступают на микроконтроллер, где определяется скорость движения транспортного средства и частота вращения коленчатого вала. После отпускания педали акселератора программа микроконтроллера выбирает наиболее оптимальный режим регулирования скорости с учетом допустимой частоты вращения коленчатого вала. Достигается повышение надежности работы круиз-контроля. 3 ил.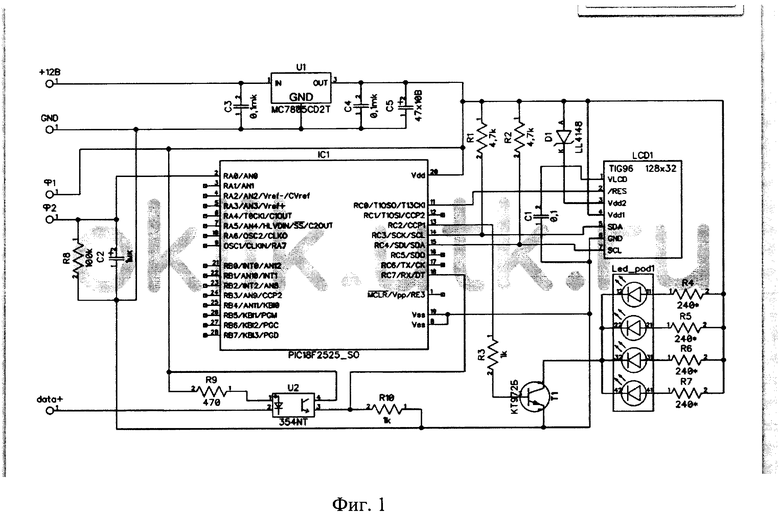
Способ оптимального поддержания скорости транспортного средства в режиме круиз-контроля, в котором транспортное средство включает в себя двигатель внутреннего сгорания, снабжающий энергией автомобиль в режиме круиз-контроля, поддерживающий скорость транспортного средства с механической коробкой передач и механической педалью акселератора, заключающийся в том, что при нажатии кнопки «ON» на панели управления круиз-контроля микроконтроллером по программе, записанной в нем, инициируется опрос датчика скорости, текущее значение которой записывается в память микроконтроллера по нажатию кнопки SET на пульте управления круиз-контроля и сравнивается с записанным значением скорости, а после отпускания педали акселератора микроконтроллер выдает пропорциональные рассогласованию текущей и сохраненной скорости сигналы управления, поступающие на драйвер управления двигателем, с выхода которого напряжение заданного уровня и заданной полярности поступает на электрический двигатель постоянного тока, тросиковый механизм которого связан с тросиком педали акселератора и изменяет (увеличивая или уменьшая) натяжение тросика педали акселератора, обеспечивая поддержание сохраненной в памяти микроконтроллера скорости транспортного средства,
отличающийся тем, что при нажатии кнопки «ON» круиз-контроля прямоугольные импульсы с датчика скорости и тахометра поступают на входы параллельного порта микроконтроллера, где по частоте следования импульсов определяется скорость движения транспортного средства и частота вращения коленчатого вала двигателя, текущие значения которых сохраняются во внутренней памяти микроконтроллера при нажатии кнопки «SET», а после отпускания педали акселератора программа микроконтроллера выбирает наиболее оптимальный режим регулирования скорости с учетом допустимой частоты вращения коленчатого вала и на основании полученных расчетов выдает сигналы управления через выходы параллельного порта на блок индикации работы круиз-контроля и драйвер управления двигателем, с выхода которого напряжение заданного уровня и заданной полярности поступает на шаговый двигатель, который через тросиковый механизм, связанный с тросиком педали акселератора, изменяет (увеличивая или уменьшая) натяжение тросика педали акселератора, что позволяет поддерживать выбранную скорость с учетом оптимального режима работы двигателя, а в случае выхода параметров работы двигателя (скорость/обороты) за программно установленные пределы эксплуатационных характеристик, на панели управления круиз-контроля выдается звуковая и световая сигнализация, информирующая водителя о необходимости перехода на другую передачу, невыполнение чего в программно установленном интервале времени автоматически приводит к поддержанию частоты вращения коленчатого вала не выше предельно допустимых значений.
| US 6363310 B1, 26.03.2002 | |||
| US 4658929 A, 21.04.1987 | |||
| Автоматическая система управления двигателем и коробкой передач транспортного средства | 1984 |
|
SU1255473A1 |

