Изобретение относится к информационно-измерительной технике и предназначено для сбора и регистрации данных, необходимых для построения пространственной траектории движения транспортного средства, в частности, при расследовании дорожно-транспортных происшествий, а также для эксплуатационного контроля.
Известны "Аварийный регистратор данных, локатор и передающее устройство для транспортных средств" (см. международную заявку № WO 98/47109, G 07 C 5/08, 1998 г.). Это устройство содержит гироскоп с тремя осями чувствительности, акселерометр с тремя осями чувствительности и компас, соединенные через аналого-цифровой преобразователь с микроконтроллером, энергозависимую статическую память типа SRAM для хранения регистрируемых данных, стираемую память типа E/ROM для хранения программ микропроцессора, передатчик и приемник спутниковых навигационных сигналов GPS, соединенные с микроконтроллером, а также последовательный порт, соединяющий внешний компьютер и микроконтроллер, внешние датчики включения световых сигналов транспортного средства, регистрации нажатия на педаль тормоза, включения стеклоочистителей, соединенные с микроконтроллером через сигнальный процессор, часы реального времени, тактовый генератор и устройство управления питанием с резервной батареей.
Недостатками рассмотренного устройства являются низкая точность восстановления скорости и траектории движения, низкая надежность сохранения информации, обусловленная использованием энергозависимой статической памяти SRAM, ограниченные функциональные возможности по регистрируемым параметрам движения транспортного средства.
Известно "Устройство для регистрации информации" (см. Патент РФ №2097703, G 01 D 9/00, 1997 г.), содержащее коммутатор аналоговых сигналов и устройство согласования и масштабирования, подключенные к входам многоканального АЦП, устройство управления на основе микроЭВМ, первый вход битового порта ввода-вывода которой соединен с выходом АЦП, коммутатор разовых команд и преобразователь частотных сигналов по форме и уровню, выходы которых подключены ко второму входу битового порта и третьему входу микроЭВМ соответственно, приемопередатчик и статическое запоминающее устройство, соединенное двусторонней связью с устройством управления, причем первый, второй и третий выходы битового порта ввода-вывода микроЭВМ подключены к входам управления многоканального АЦП, четвертый и пятый выходы - с входами управления коммутатора аналоговых сигналов и коммутатора разовых команд соответственно, а порт последовательного интерфейса микроЭВМ соединен двусторонней связью с приемопередатчиком. Устройство управления дополнительно снабжено шинами адреса, данных и управления микроЭВМ, а также регистром и логической схемой ИЛИ, при этом старшие разряды шины адреса соединены с входом данных регистра, синхровход которого подключен к выходу схемы ИЛИ, один вход которой соединен с шиной управления, а второй вход - с шестым выходом битового порта ввода-вывода микроЭВМ. Порт данных статического запоминающего устройства соединен двусторонней связью с шиной данных устройства управления, младшие разряды порта адреса запоминающего устройства соединены с соответствующими разрядами шины адреса; старшие разряды порта адреса запоминающего устройства соединены с соответствующими разрядами шины адреса, подключены к выходам регистра, соединенного также с первыми входами порта управления запоминающего устройства и адресными входами коммутатора аналоговых сигналов, коммутатора разовых команд и многоканального АЦП; вторые входы порта управления запоминающего устройства соединены с шиной управления устройства управления, а выходы преобразователя частотных сигналов по форме и уровню подключены к входам порта прерываний микроЭВМ.
Данное устройство предназначено для использования в авиационной технике для регистрации полетной информации от соответствующих датчиков, в том числе для регистрации навигационных параметров, однако для применения на наземных транспортных средствах оно мало пригодно из-за отсутствия на большинстве из них датчиков навигационных параметров, что не позволяет обеспечить точность восстановления скорости и траектории движения транспортного средства в случае аварии.
Наиболее близким по технической сущности к заявляемому устройству является "Устройство для восстановления скорости и траектории движения транспортного средства по зарегистрированным данным при дорожно-транспортном происшествии" (см. Патент РФ №2232097, B 62 D 41/00, G 07 C 5/08, 2004 г.), содержащее два микромеханических акселерометра с осями чувствительности, ориентированными соответственно в направлении продольной и поперечной перегрузок транспортного средства, микроконтроллер, соединенный с выходами акселерометров через аналого-цифровые преобразователи, блок энергонезависимой памяти данных, подключенный к выходу микроконтроллера, три микромеханических датчика угловой скорости с взаимно ортогональными осями чувствительности, выходы которых подключены через аналого-цифровые преобразователи к входам микроконтроллера. Ось чувствительности одного из этих датчиков ориентирована в направлении продольной, другого - вертикальной, а третьего - боковой перегрузок транспортного средства, а блок энергонезависимой памяти выполнен с возможностью использования записанных данных для построения траектории движения в проекции на горизонтальную плоскость по координатам Хм и Yм в местной системе координат как функции обратного времени - t. Микромеханические акселерометры, датчики угловой скорости, аналогово-цифровые преобразователи и микроконтроллер размещены в общем корпусе, снабженном установочной базой для закрепления его на транспортном средстве. Устройство также содержит два дополнительных микромеханических акселерометра с ортогонально расположенными осями чувствительности, причем оси чувствительности дополнительных акселерометров попарно параллельны осям чувствительности основных микромеханических акселерометров, а выходы дополнительных микромеханических акселерометров соединены с микроконтроллером через аналого-цифровые преобразователи, при этом диапазон измеряемых ускорений дополнительных микромеханических акселерометров установлен большим соответствующего диапазона основных акселерометров. Кроме того, устройство содержит блок предельных ускорений, подключенный к выходам основных акселерометров и связанный с блоком энергонезависимой памяти.
Это устройство предназначено для установки внутри транспортного средства. Для осуществления способа восстановления скорости и траектории движения транспортного средства ведется непрерывное измерение параметров его движения, по меньшей мере, проекций полного ускорения на продольную и поперечную геометрические оси, и сохранение в запоминающем устройстве результатов измерений. Измеряются текущие значения проекций угловой скорости транспортного средства на три его геометрические взаимно ортогональные оси, а результаты измерений используют для построения траектории в проекции на горизонтальную плоскость по координатам Хм и Yм в местной системе координат как функции обратного времени - t, определяемом по соответствующим уравнениям движения транспортного средства в пространстве.
Однако данное устройство характеризуется недостаточной точностью при восстановлении скорости и траектории движения объекта, так как измеряются только две проекции линейного ускорения, число регистрируемых параметров движения транспортного средства ограничено, а также отсутствует точная привязка местоположения транспортного средства к координатам на местности. В случае аварийного отключения питания в бортовой сети, например, при дорожно-транспортном происшествии обеспечение электропитания не предусмотрено, что приведет к прекращению измерений и тем самым к снижению достоверности результатов измерений и надежности работы устройства в целом. Кроме того, в устройстве не предусмотрена возможность полезного использования регистрируемых данных непосредственно на борту транспортного средства, что снижает функциональные возможности устройства.
Основной задачей, на решение которой направлено заявляемое изобретение, и, соответственно, основным техническим результатом является повышение точности регистрируемой информации для восстановления скорости и траектории движения транспортного средства при расследовании дорожно-транспортного происшествия. Кроме того, дополнительными техническими результатами от использования изобретения являются также повышение достоверности регистрируемой информации путем обеспечения электропитания устройства в аварийной ситуации, а также расширение его функциональных возможностей за счет расширения спектра регистрируемых параметров и возможности контроля за функционированием систем транспортного средства при его эксплуатации.
Решение этих задач достигается тем, что в устройство для регистрации информации о транспортном средстве, содержащее микроконтроллер (микроЭВМ), соединенный с блоком энергонезависимой памяти данных, три микромеханических датчика угловой скорости с взаимно ортогональными осями чувствительности, выходы которых подключены через блок аналого-цифровых преобразователей к входам микроЭВМ, и два микромеханических акселерометра с осями чувствительности, ориентированными соответственно в направлении продольной и поперечной осей транспортного средства, согласно данному изобретению, дополнительно введены третий акселерометр с осью чувствительности, ориентированной в направлении вертикальной оси транспортного средства, три датчика угловых ускорений с взаимно ортогональными осями чувствительности и магнитный компас, соединенные через блок аналого-цифровых преобразователей с микроЭВМ, а также приемник спутниковых навигационных сигналов с антенной, соединенный с микроЭВМ через блок подключения цифровых устройств. Кроме того, устройство дополнительно снабжено приемопередатчиком с антенной, блоком индикации и пультом управления, соединенными двусторонней связью с микроЭВМ, а блок питания снабжен резервным источником питания, соединенным с устройством управления питанием.
Кроме того, устройство снабжено блоком аналоговых датчиков, подключенным к микроЭВМ через блок аналого-цифровых преобразователей.
Кроме того, устройство снабжено блоком цифровых датчиков, подключенным к микроЭВМ через блок подключения цифровых устройств.
Совокупность существенных признаков изобретения обеспечивает получение технического результата, обусловленного решением поставленных задач. Введение в устройство дополнительных третьего акселерометра, трех датчиков угловых ускорений, приемника спутниковых навигационных сигналов и магнитного компаса позволяет существенно повысить точность и достоверность измерений при восстановлении траектории и скорости движения транспортного средства, определять наличие и характер вращательного движения транспортного средства в пространстве, а также относительное местоположение транспортного средства на местности. В частности, введение в устройство еще одного акселерометра дает возможность регистрировать дополнительно вертикальную составляющую вектора ускорения и таким образом восстанавливать полный вектор линейного ускорения по трем проекциям. В то же время датчики угловых ускорений позволяют определять вектор углового ускорения по трем проекциям. Имея данные по линейным и угловым ускорениям (6 степеней свободы), можно однозначно определить положение твердого тела (транспортного средства) в пространстве.
Кроме того, полученные данные позволяют определять силы, воздействующие на транспортное средство во время аварии.
Расширение функциональных возможностей устройства осуществляется благодаря введению приемопередатчика, обеспечивающего автоматическое информирование соответствующих служб и других участников движения об аварийной ситуации и степени ее тяжести, блока аналоговых датчиков и блока цифровых датчиков, позволяющих расширить спектр регистрируемых параметров, а введение блока индикации совместно с пультом управления позволяет использовать навигационную и другую информацию в процессе эксплуатации самого транспортного средства. В то же время введение резервного элемента питания, подключенного к устройству управления питанием, повышает достоверность регистрируемой информации, обеспечивая завершение регистрации параметров движения в отсутствии питания в бортовой сети транспортного средства.
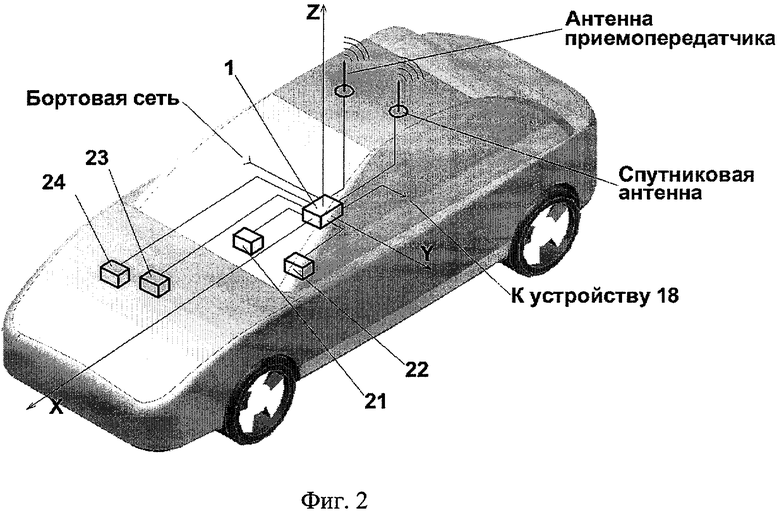
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема устройства для регистрации данных о транспортном средстве, а на фиг.2 показано размещение устройства на транспортном средстве.
Устройство 1 для регистрации информации о транспортном средстве содержит микроЭВМ 2 с подключенным к ней блоком 3 энергонезависимой памяти данных, три микромеханических датчика угловой скорости 4, 5, 6 с взаимно ортогональными осями чувствительности, выходы которых подключены через блок 7 аналого-цифровых преобразователей ко входам микроЭВМ 2, а также три акселерометра 8, 9, 10 с взаимно ортогональными осями чувствительности, три датчика угловых ускорений 11, 12, 13 с взаимно ортогональными осями чувствительности и магнитный компас 14, выходы которых также подключены ко входам микроЭВМ 2 через блок 7 аналого-цифровых преобразователей. При этом оси чувствительности датчиков 4, 5 и 6, акселерометров 8, 9 и 10 и датчиков 11, 12 и 13 ориентированы соответственно в направлении продольной, поперечной и вертикальной осей транспортного средства.
Магнитный компас 14, предназначенный для измерения курса транспортного средства, может быть реализован, например, на основе магниторезистивного датчика или индукционного датчика.
Устройство содержит также приемник 15 спутниковых навигационных сигналов с подключенной к его входу спутниковой антенной, выполненный с возможностью приема и обработки сигналов глобальной спутниковой системы радионавигации и, на основании этих данных, вычисления своего местоположения. В частности, этот приемник может быть выполнен в виде приемника типа GPS/ГЛОНАСС. Приемник спутниковых навигационных сигналов 15 соединен с микроЭВМ 2 через блок 16 подключения цифровых устройств. В качестве блока 16 подключения цифровых устройств может быть использовано, например, устройство для передачи и обработки информации в цифровом виде на основе CAN-технологии, которая последнее время широко используется в промышленности и на транспорте.
Ко входу микроЭВМ 2 подключены двусторонней связью также приемопередатчик 17 с антенной, предназначенный для передачи цифровых данных на небольшие расстояния и использующий, например, беспроводную связь типа Bluetooth-канала, и внешнее устройство 18 обработки информации, в качестве которого может быть использован стационарный или переносный (типа Notebook) персональный компьютер, имеющий специальное программное обеспечение.
Устройство содержит также резервный источник питания 19, подключенный к устройству управления питанием 20; блок индикации 21 и пульт управления 22, причем приемопередатчик 17, устройство управления питанием 20, блок индикации 21 и пульт управления 22 соединены с микроконтроллером 2 непосредственно.
В качестве резервного источника питания 19 может быть использована, например, литиевая батарея.
Кроме того, к микроЭВМ 2 через блок 7 аналого-цифровых преобразователей подключен блок аналоговых датчиков 23, содержащий, например, датчик относительной линейной скорости, датчик приборной скорости, датчик скорости вращения колеса, датчик угла поворота рулевого колеса, датчик оборотов двигателя, датчик нагрузки на рулевом колесе, датчик относительного положения колеса и кузова транспортного средства и другие.
Кроме того, к микроЭВМ 2 через блок подключения цифровых устройств 16 подключен блок цифровых датчиков 24, содержащий, например, датчик времени развертывания подушки безопасности, датчик состояния системы подушек безопасности, датчик состояния системы круиз-контроля, датчик состояния системы автоматического торможения, датчик загрузки транспортного средства пассажирами, датчик состояния системы управления сцеплением с поверхностью дороги, датчик сигналов поворотов и включения света фар, датчик состояния системы стеклоочистителей, датчик нажатия на педаль тормоза, датчик положения педали акселератора, датчик состояния антиблокировочной системы торможения, датчик состояния системы автоматического переключения передач, датчик использования ремней безопасности и другие.
Устройство для регистрации данных о транспортном средстве работает следующим образом.
Устройство устанавливают на корпусе транспортного средства по возможности ближе к центру массы, например, таким образом, чтобы оси чувствительности трех акселерометров 8, 9 и 10 совпадали с продольной, поперечной и вертикальной осями транспортного средства соответственно.
Перед началом эксплуатации устройства с помощью внешнего устройства обработки информации 18, подключаемого единовременно к входу микроЭВМ 2, в энергонезависимую память 3 вносят идентификационные данные, например данные о владельце транспортного средства, государственные регистрационные номера транспортного средства и т.д. Идентификационные данные хранятся в энергонезависимой памяти 3 постоянно.
Включение устройства осуществляют подачей напряжения на устройство 20 управления питанием. По команде микроЭВМ 2 производится опрос сигналов, поступающих от блока 7 аналого-цифровых преобразователей и блока 16 подключения цифровых устройств в параллельном режиме. Регистрация параметров транспортного средства осуществляется непрерывно в энергонезависимой памяти 3 в виде информационных кадров, формируемых микроЭВМ 2 в соответствии с заложенной программой. Эта запись может осуществляться, например, в режиме записи "по кольцу", в котором при исчерпании объема энергонезависимой памяти 3 производится запись новых информационных кадров на место наиболее старых.
Кроме того, микроЭВМ 2 выдает управляющие сигналы на блок приемопередатчика 17, внешнее устройство обработки информации 18, устройство управления питанием 20, блок индикации 21 и пульт управления 22.
В процессе регистрации производят запись следующих параметров движения транспортного средства:
- получаемых от внутренних блоков устройства: ускорения в трех ортогональных осях, проекции угловых скоростей по трем осям, проекции угловых ускорений по трем осям, курс, спутниковые навигационные параметры и точное время, напряжение в бортовой сети транспортного средства;
- получаемых от блока 23 аналоговых датчиков: относительная линейная скорость, приборная скорость, скорость вращения колеса, угол поворота рулевого колеса, число оборотов двигателя, величина нагрузки на рулевом колесе, относительное положение колеса и кузова транспортного средства;
- получаемых от блока 24 цифровых датчиков: время развертывания подушек безопасности, состояние системы подушек безопасности, состояние системы круиз-контроля, состояние системы автоматического торможения, загрузка транспортного средства (число пассажиров), состояние системы управления сцеплением с дорогой, сигналы поворотов и включения света фар, состояние системы стеклоочистителей, нажатие на педаль тормоза, позиция педали акселератора, состояние антиблокировочной системы торможения, состояние системы автоматического переключения передач, данные об использовании ремней безопасности.
В случае падения напряжения в бортовой сети ниже определенного порогового значения устройство управления питанием 20 производит переключение блоков устройства 1 для регистрации данных на питание от резервного источника питания 19.
В случае регистрации параметров движения транспортного средства, свидетельствующих об аварийном состоянии, определяемом в соответствии с программой микроЭВМ 2, регистрация информации продолжается в течение десяти минут после полной остановки транспортного средства, когда выходные сигналы датчиков угловых скоростей 4, 5, 6 и, например, внешних датчиков относительной линейной скорости примут нулевые значения. Факт регистрации аварии выводится на блок индикации 21, а данные о произошедшей аварии через приемопередатчик 17 транслируются соответствующим службам и другим транспортным средствам, снабженным соответствующими приемниками.
При расследовании дорожно-транспортного происшествия уполномоченные службы получают доступ к зарегистрированным данным, подключая внешнее устройство обработки информации 18 к входу микроЭВМ 2 и копируя зарегистрированную информацию из блока энергонезависимой памяти 3.
Во время эксплуатации устройства водитель транспортного средства может получать различную информацию от блоков устройства, управляя выводом информации на блок индикации 21 с пульта управления 22.
Как следует из вышеизложенного, достижение повышения точности восстановления скорости и траектории движения транспортного средства обеспечивается путем введения третьего акселерометра, трех датчиков угловых ускорений, приемника спутниковых навигационных сигналов, магнитного компаса. Введение приемопередатчика обеспечивает автоматическое информирование соответствующих служб и других участников движения об аварийной ситуации и степени ее тяжести. Введение резервного элемента питания совместно с устройством управления питанием повышает надежность устройства, обеспечивая завершение регистрации параметров движения в отсутствии питания в бортовой сети транспортного средства. Применение блока индикации совместно с пультом управления позволяет использовать навигационную и другую информацию в процессе эксплуатации транспортного средства. Сопоставление признаков, характеризующих заявленное изобретение и прототип, позволяет сделать вывод, что в заявленном изобретении достигается более точное восстановление скорости и траектории движения транспортного средства, повышение достоверности информации и расширение функциональных возможностей устройства регистрации информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО МОНИТОРИНГА РАБОЧИХ ПОКАЗАТЕЛЕЙ НАВЕСНОГО ОБОРУДОВАНИЯ КОМБИНИРОВАННОЙ ДОРОЖНОЙ МАШИНЫ И СПОСОБ ЕГО РАБОТЫ | 2023 |
|
RU2807461C1 |
| Инерциальный измерительный преобразователь | 2024 |
|
RU2821240C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2019 |
|
RU2720224C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
Изобретение относится к информационно-измерительной технике. Его использование для сбора и регистрации данных о движении позволяет получить технический результат в виде повышения точности восстановления скорости и траектории движения транспортного средства при расследовании дорожно-транспортного происшествия. Устройство содержит микроЭВМ, блок энергонезависимой памяти данных, три микромеханических датчика угловой скорости с взаимно ортогональными осями чувствительности, аналого-цифровые преобразователи и два микромеханических акселерометра с осями чувствительности, ориентированными соответственно в направлении продольной и поперечной осей транспортного средства. Технический результат достигается благодаря введению третьего акселерометра с осью чувствительности, ориентированной в направлении вертикальной оси транспортного средства, трех датчиков угловых ускорений с взаимно ортогональными осями чувствительности и магнитного компаса, а также приемника спутниковых навигационных сигналов с антенной и блока подключения цифровых устройств. 7 з.п. ф-лы, 2 ил.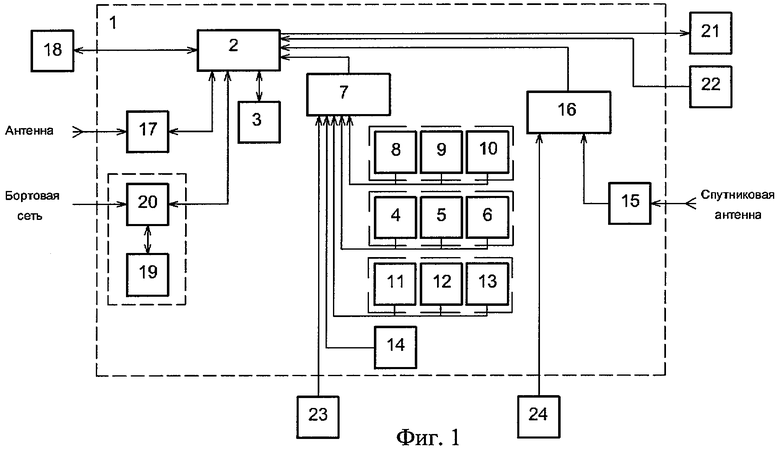
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193989C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1997 |
|
RU2121146C1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 6185490 B1, 06.02 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

