Предлагаемое устройство относится к испытательной технике и может быть использовано для контроля авиационных объектов.
Известен испытательный стенд для испытания легких авиационных объектов, содержащий трехстепенной подвес, а также датчики поворота объекта по трем осям (патент RU 2032200, F 41 G 3/26, 27.03.1995).
Недостатком этого изобретения является невозможность индикации и имитации пространственно разнесенных объектов.
Задачей предлагаемого изобретения является обеспечение индикации нескольких объектов, наводимых на множество целей.
Эта задача достигается тем, что испытательный стенд содержит имитатор целей и отражательный экран, установленный перед имитатором целей, приемную головку, при этом имитатор целей и приемная головка установлены в трехосных подвесах и содержат датчики поворота их вокруг трех независимых углов.
Другим отличием устройства является то, что имитатор целей размещен в фокусе экрана, а приемная головка установлена со смещением относительно имитатора целей. Устройство отличается также тем, что соосно с имитатором целей установлен проекционный аппарат, а в экране выполнены отверстия, у которых установлены фотодиоды, подключенные к своим индикаторам. Кроме того, отличием устройства является то, что к имитатору целей подключены свои генераторы со своей частотой, скважностью и поляризацией. Кроме того, отличием является то, что в состав имитатора целей введен фазометр, один вход которого соединен с выходом имитатора целей, а второй вход подключен к выходу приемной головки. Другим отличием устройства является то, что экран выполнен из отдельных секций, установленных на опорной конструкции посредством регулировочных винтов. Устройство отличается также тем, что экран установлен на опорной конструкции посредством обечайки.
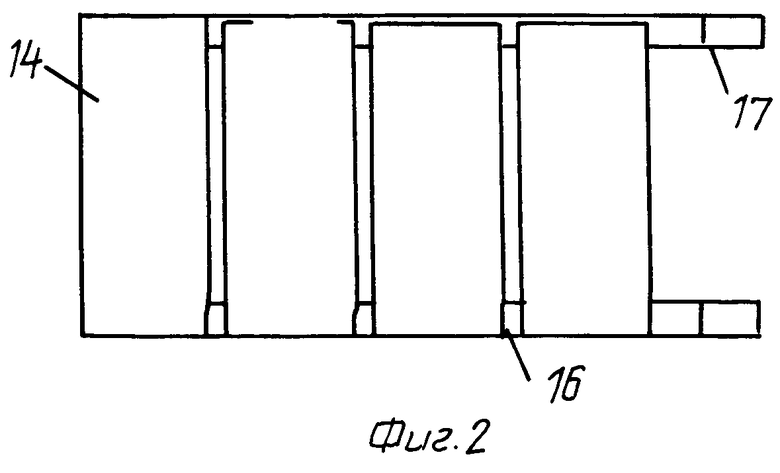
Предлагаемое устройство изображено на фиг.1; на фиг.2 показан элемент устройства.
Испытательный стенд представляет собой комплекс полунатурного моделирования (КПМ), который предназначен для комплексной отработки системы управления изделием методом полунатурного моделирования с использованием реальных систем бортового комплекса управления (БКУ).
Реальная аппаратура БКУ, включающая автопилот (АП) и головку наведения (ГН), устанавливается на трехстепенной динамический стенд 3ПШК, позволяющий воспроизводить угловое движение изделия. Чувствительный элемент ГН (антенна) направлен внутрь безэховой камеры на отражающий экран.
К рупору, установленному на двухстепенной платформе, подключены генераторы. Рупор перемещается автоматически в соответствии с рассчитанными в процессе моделирования углами визирования цели.
Полунатурное моделирование производится в реальном масштабе времени, включая предстартовую подготовку, пуск и автономный полет изделия. Управление процессом моделирования осуществляется центральным персональным компьютером, в функции которого, в частности, входят:
- имитация аппаратуры подготовки пуска;
- имитация движения изделия;
- выработка и передача сигналов на стойки управления 3ПШК и РИЦ (радиолокационный имитатор цели);
- обмен с БКУ и электросхемой изделия.
БКУ в зависимости от углового и пространственного положения изделия относительно цели, а также в соответствии с временной циклограммой работы вырабатывает сигналы на органы управления изделия (рули).
Центральный компьютер, решая уравнения динамики с учетом нового положения рулей, определяет угловое и пространственное перемещение изделия и передает соответствующие сигналы на стойки управления 3ПШК и РИЦ. Стенд 3ПШК, отрабатывая полученные сигналы, изменяет угловое положение ГН и АП.
Датчики АП фиксируют эти изменения, и БКУ вырабатывает новые сигналы управления. По изменению пространственного положения изделия центральный компьютер определяет новые углы визирования цели и дает команды на изменение углов рупора РИЦ. Процесс моделирования происходит непрерывно от предстартовой подготовки до конца полета изделия.
Подача на рупор (их может устанавливаться насколько) разных по частоте сигналов дает возможность осуществлять селекцию цели.
Испытательный стенд содержит имитатор целей 1, а также приемную головку 2, установленный перед ними отражательный экран 3.
Имитатор целей 1 и приемная головка 2 установлены в трехстепенных подвесах 4 с датчиками 5 их поворота независимо по трем осям. При этом имитатор целей 1 установлен в фокусе экрана 3, а приемная головка 2 - со смещением относительно имитатора. К имитатору целей 1 подключены генераторы 6, настроенные на разные частоты, скважность, поляризацию. На индикаторе целей установлен проекционный аппарат 7, а в экране 3 в соответствующих местах изображения целей выполнены отверстия и сопряженные с ними фотоприемники 6, подключенные к одному входу 11, а выход приемной головки 2 подключен к другому входу 11 дополнительно введенного фазометра 13. Выход фазометра 13 подключен к индикатору. Экран 3 выполнен из отдельных секций 14 с регулировочными винтами 15. Кроме того, экран выполнен на жестком основании 16 и связан с обечайкой 17, прикрепленной к опорной конструкции.
Предлагаемое устройство работает следующим образом. Сигналы на соответствующих частотах, поляризации и скважности излучаются генераторами 6 через имитатор цели в направлении экрана 3.
Отразившись от экрана 3, сигнал поступает в приемную головку 2, имитирующую со своим подвесом 4 соответствующие нагрузки на головку 2. Посредством оси проекционного аппарата 7 уточняется выставка имитатора 1 относительно экрана 3 и регулировка на нем отдельных секций 14 так, чтобы отдельные секции 14 регулировались винтами 15. Сигналы с имитатора целей 1 и с выхода приемной головки 2 поступают в фазометр 13, где измеряется разность фаз, а по ним определяется расстояние до соответствующей секции. Установка секций 14 производится посредством жесткой конструкции регулировочных винтов 15. Кроме того, в устройстве предусмотрена регулировка секций экрана 3 относительно обечайки 17.
В устройстве обеспечивается имитация изображения большого числа целей и наведение на цели летательных аппаратов, что позволяет улучшить имитационные возможности стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2002 |
|
RU2207486C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СПОСОБ ТЕПЛОВАКУУМНЫХ ИСПЫТАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2208564C1 |
| ИНДУКТОР УПРАВЛЯЕМОГО МАГНИТНОГО ПОЛЯ | 2007 |
|
RU2345327C1 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ | 2006 |
|
RU2325706C1 |
| СТЕНД ДЛЯ ВИБРОУДАРНЫХ ИСПЫТАНИЙ УЗЛОВ И АГРЕГАТОВ ИЗДЕЛИЙ И ТОРМОЗ СТЕНДА ДЛЯ ВИБРОУДАРНЫХ ИСПЫТАНИЙ | 2011 |
|
RU2458329C1 |
| Способ имитации радиосигнала | 2016 |
|
RU2621329C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2004 |
|
RU2263869C1 |
Изобретение относится к испытательной технике и предназначено для комплексной отработки системы управления авиационных объектов. Реализация устройства позволяет обеспечить индикацию нескольких объектов, наводимых на множество целей. Сущность изобретения заключается в том, что отражающий экран выполнен в виде отдельных секций, установленных на обечайке с возможностью регулировочных перемещений относительно последней посредством регулировочных винтов. Расстояние до соответствующей секции определяется с помощью фазометра. 5 з.п.ф-лы, 2 ил.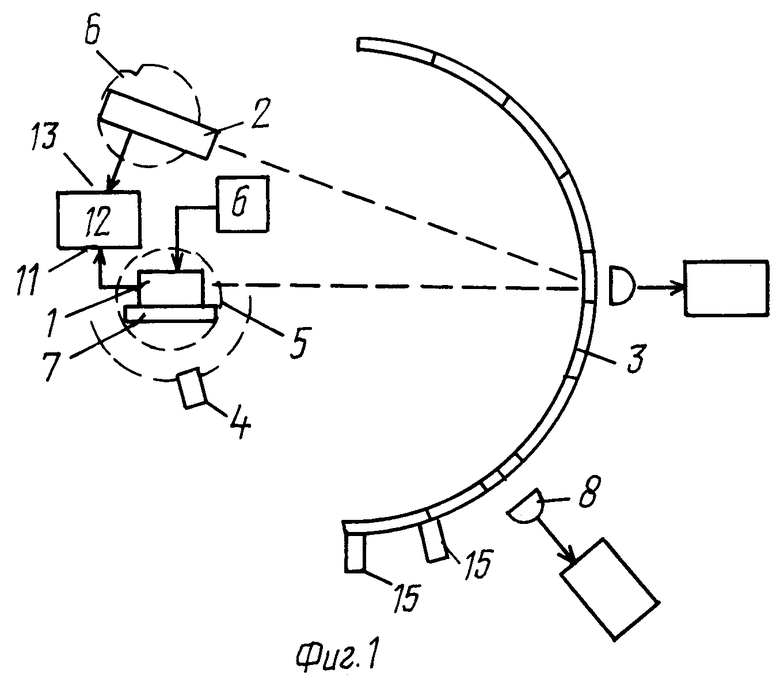
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КИНООПЕРАТОРА | 1991 |
|
RU2032200C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СООРУЖЕНИЕ ДЛЯ ПОКАЗА ТЕАТРАЛИЗОВАННЫХ ПРЕДСТАВЛЕНИЙ С ВОЗДЕЙСТВИЕМ НА РАЗЛИЧНЫЕ ОРГАНЫ ЧУВСТВ ЗРИТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2126705C1 |
| US 5215465 А, 01.06.1993 | |||
| US 4349337, 14.09.1982. | |||

