Изобретение относится к области испытательной техники и может быть использовано при комплексном полунатурном моделировании функционирования авиационных и космических объектов, в частности для имитации динамических целей (объектов), перемещающихся по двум координатам.
Известно устройство автоматизированного наземного контроля ракеты по патенту RU №2231732, МПК 7 F 41 G 7/00, 2003.11.11, включающее управляемую ракету с головкой самонаведения (ГСН), автоматизированный комплекс проверочной аппаратуры, измерительное устройство ответных реакций и имитатор целей, который представляет собой банк данных (образцов) реальных целей в реальных условиях применения ракеты, который вводится в коллиматорное устройство для их последующего распознавания ГСН и оценки ее работоспособности. Однако указанный имитатор целей не позволяет получить реального изменения местоположения целей, позволяющего более точно оценить функционирование ГСН.
Известен испытательный стенд по патенту RU №2207485, МПК 7 F 41 G 3/26, 2002.11.01, содержащий ГСН, отражательный экран и имитатор цели, включающий излучатель сигналов. Отражательный экран установлен перед имитатором цели. Имитатор цели включает излучающий рупор, установленный на перемещаемую платформу. Однако указанное техническое решение не позволяет проводить динамическую отработку бортовых систем управления в автоматизированном режиме. Кроме того, вследствие смещения ГСН относительно имитатора цели при перемещении сигнала по сфере меняется расстояние его прохождения после отражения до приемника, что приводит к появлению систематической ошибки, учет которой представляет собой сложную задачу, особенно при одновременной работе по нескольким целям.
Известна система для прогнозирования результатов натурных испытаний беспилотного летательного аппарата по патенту RU №2160927, МПК 7 G 06 G 7/72, 2000.04.20, содержащая комплекс измерительных систем, включающий имитатор радиосигналов, предназначенный для выработки сигнала, имитирующего движение объекта наблюдения по дальности, а также имитатор углового движения объектов наблюдения, предназначенный для воспроизведения углового перемещения объекта наблюдения и отраженного от него сигнала. Конструктивно имитатор углового движения объекта представляет собой каретку с антенным излучателем, соединенным с выходом имитатора радиосигналов. Каретка движется по направляющей, расположенной на расстоянии, где обеспечивает плоский фронт волн при раскрыве антенны радиолокационного визира. В качестве антенного устройства используется рупорный излучатель. Указанное техническое решение является наиболее близким аналогом к заявленному предложению и выбрано в качестве прототипа. Однако указанный имитатор цели не позволяет осуществлять перемещение цели (объекта наблюдения) по двум координатам. Также получение высокой точности позицирования, т.е. определение координат цели с помощью вспомогательных средств, представляет собой сложную задачу, решение которой требует больших затрат, поскольку каретка перемещается по направляющей, не являющейся частью сферической поверхности, на которой определение координат излучателя сигнала проще и точнее. Кроме того, динамические характеристики движения объекта наблюдения (цели) не позволяют реализовать всех возможностей известной системы прогнозирования результатов натурных испытаний, поскольку не реализуется движение цели по сферической поверхности, используя при этом и вращательное движение по окружности. Также диапазон значений углов, в котором может изменяться положение излучателя сигнала, невелик.
Задачей настоящего изобретения является повышение достоверности оценки результатов испытаний за счет получения высокой точности позицирования и расширения радиообзора цели.
Сущность предложенного изобретения заключается в том, что двухстепенной динамический имитатор целей содержит последовательно соединенные блок формирования сигналов и излучатель сигналов, закрепленный на перемещающейся каретке, при этом имитатор снабжен дополнительными каретками с излучателями сигналов и вертикальными стойками, верхним основанием, верхним узлом вращения, верхней осью вращения, нижним основанием, нижним узлом вращения, последовательно включенными пультом управления вращением, электроприводом и механическим приводом вращения, соединенным с верхним или нижним узлами вращения, блоком управления перемещением кареток, приемным блоком линии передачи команд управления, первые выходы которого подключены к соответствующим управляющим входам блока формирования сигналов, а вторые выходы - к управляющим входам соответствующих узлов перемещения каретки, последовательно соединенными блоком управления излучением и передающим блоком линии передачи команд управления, второй вход которого подключен к выходу блока управления перемещением кареток, причем входы излучателей сигналов подключены к соответствующим выходам блока формирования сигналов, верхние концы вертикальных стоек соединены друг с другом и в месте их соединения закреплена вертикальная ось вращения, входящая в верхний узел вращения, закрепленный на верхнем основании, нижние концы вертикальных стоек укреплены в подвижной части нижнего узла вращения, неподвижная часть которого закреплена на нижнем основании, при этом приемный блок линии передач команд управления и блок формирования сигналов расположены на вращающейся части двухстепенного динамического имитатора целей, а каждая из кареток размещена на вертикальной стойке.
В частном случае исполнения вертикальные стойки имитатора целей выполнены криволинейными, при этом кривизна имеет постоянный радиус.
В частном случае исполнения вертикальные стойки имитатора целей соединены с наружной стороны кольцом жесткости.
Приемный блок линии передачи команд управления и блок формирования сигналов могут быть закреплены на подвижной части нижнего узла вращения.
Вертикальные стойки, каретки и узлы перемещения каретки могут быть выполнены с внутренней зубчатой линейной передачей.
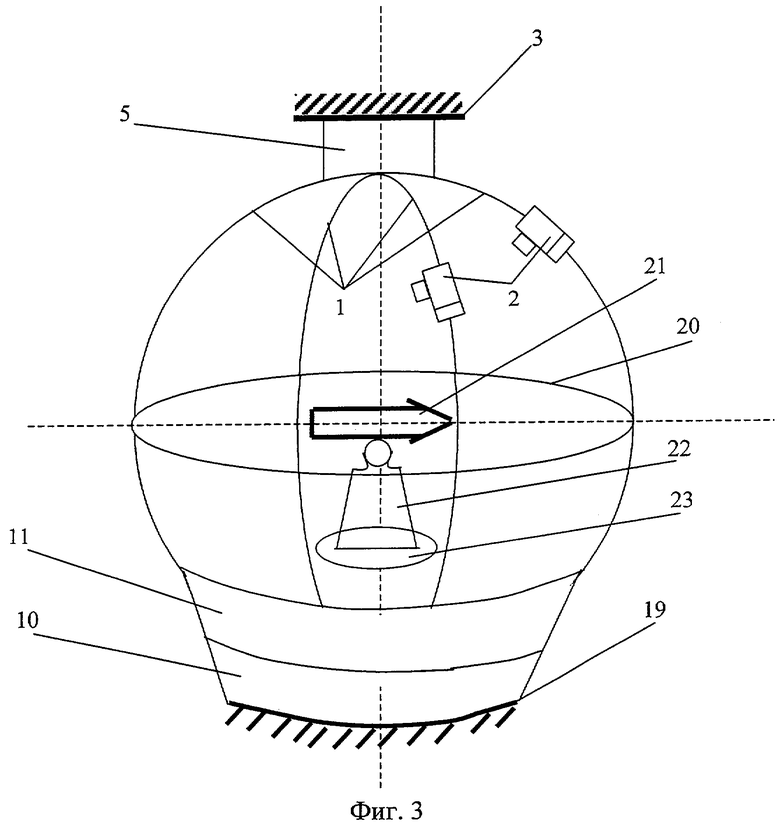
На фиг.1 приведена конструкция предлагаемого двухстепенного динамического имитатора целей, а на фиг.2 - схематический вид нижнего узла вращения. На фиг.3 изображен двухстепенный динамический имитатор целей совместно с динамическим стендом воспроизведения движения ГСН и самой ГСН,
Двухстепенной динамический имитатор целей содержит вертикальные стойки 1, каретки 2, верхнее основание 3, верхнюю ось вращения 4, верхний узел вращения 5, пульт управления вращением 6, электропривод 7, механический привод вращения 8, нижний узел вращения 9, состоящий из неподвижной части нижнего узла вращения 10 и подвижной части нижнего узла вращения 11, блок управления излучением 12, блок формирования сигналов 13, излучатели сигналов 14, блок управления перемещением кареток 15, узлы перемещения каретки 16, передающий блок линии передачи команд управления 17, приемный блок линии передачи команд управления 18, нижнее основание 19, кольцо жесткости 20. Кроме того, на фиг.1-3 изображены: головка самонаведения 21, динамический стенд воспроизведения движения головки самонаведения 22 и основание динамического стенда воспроизведения движения ГСН 23.
Двухстепенной динамический имитатор целей работает следующим образом. Блок управления излучением 12 формирует команду, определяющую вид имитирующей цели, т.е. частотный диапазон сигнала, его мощность, поляризацию. Эта команда поступает на первый вход передающего блока линии передачи команд управления 17, на второй вход которого поступает сигнал с выхода блока управления перемещением кареток 15, который представляет собой команду, определяющую закон перемещения по соответствующей вертикальной стойке 1 соответствующей каретки 2. Передающий блок линии передачи команд управления 17 излучает сигнал, несущий указанную информацию, поступившую на его два входа, а приемный блок линии передачи команд управления 18 принимает этот сигнал и дешифрирует. Таким образом, на первых и вторых его выходах имеют место сигналы, соответствующие сформированным блоком управления излучением 12 и блоком управления перемещением кареток 15 соответственно. Сигнал с первого выхода приемного блока линии передач команд управления 18 поступает на вход блока формирования сигнала 13, на выходах которого непосредственно и формируются соответствующие сигналы, определяющие вид имитирующей цели, т.е. ее частотный диапазон, мощность, поляризацию. Эти сигналы поступают на входы соответствующих излучателей сигналов 14, которые их излучают в пространство. Сигналы со вторых выходов приемного блока линии передачи команд управления 18 поступают на входы соответствующих узлов перемещения каретки 16, которые и осуществляют заданное перемещение кареток 2 вместе с излучателями сигналов 14 по вертикальным стойкам 1. Таким образом, происходит перемещение целей по углу места. Рассмотрим изменение положения целей по азимуту. Пульт управления вращением 6 формирует сигнал, определяющий закон перемещения излучателя сигналов 14 по азимуту: направление, скорость, при необходимости, и ускорение, который поступает на электропривод 7, где преобразуется во вращательное движение, и посредством механического привода вращения 8 осуществляет вращение двухстепенного динамического имитатора целей, при этом может быть использован как верхний узел вращения 5, так и нижний узел вращения 9. Заметим, что возможность использования одного из двух указанных узлов вращения 5 или 9 является альтернативным признаком и справедливо включен в п.1 формулы изобретения, поскольку в совокупности с другими признаками, включенными в формулу изобретения, обеспечивается получение одного и того же технического результата. В двухстепенной динамический имитатор целей, при проведении испытаний, например головка самонаведения, помещается, согласно фиг.3, динамический стенд воспроизведения движения головки самонаведения 22 с установленной на нем головкой самонаведения 21. Усечение сферы двухстепенного динамического имитатора целей проведено с целью возможности установки в нем указанных стенда 22 и головки самонаведения 21. На фиг.2 схематически показан нижний узел вращения 9, который позволяет разместить внутри основание динамического стенда воспроизведения движения ГСН 23. Определение местоположения источника излучения 14 в сферической системе координат может осуществляться, например, с помощью координатной сетки, получение которой не составляет труда, поскольку представляет собой деление окружности на 360°. Сферические координаты при необходимости могут быть преобразованы в декартовые. Определение азимутальных характеристик и соответствующее управление по азимуту также упрощается при выполнении нижнего узла вращения 9 по типу широко известного антенно-поворотного устройства (АПУ) радиолокационной станции (РЛС), см., например, М.И. Финкельштейн «Основные радиолокации» - М., Сов. радио, 1973, стр.402-403; «Радиолокационные устройства» под редакцией В.В. Григорина-Рябова, М., Сов. радио, 1970, стр.93-95; РЛС1Л13 / С.Петухов, И.Шестов «История создания и развития вооружения и военной техники ПВО сухопутных войск России» - издательство «ВКП», 1999 г., адрес в Internet - http://i.pvo.guns.ru/rtv/nitel/1113.htm#5/, которая может работать, как в автоматическом круговом режиме, выдавая текущий азимут при круговом вращении, так и в программном режиме управления, устанавливая и перемещая, в конечном итоге, источник излучения 14, по заданной программе (так называемый программный обзор пространства РЛС). Также увеличивая количество вертикальных стоек 1 и кареток 2 можно получить требуемое количество целей. Кроме того, увеличиваются предельные углы перемещения кареток 2 как в горизонтальной плоскости (360°), так и в вертикальной плоскости (предельный угол зависит от степени «усечения» упомянутой ранее сферы).
Реализация приемного и передающего блоков линии передач команд управлений 18 и 17 соответственно может быть осуществлена по известным правилам построения линий передач информации, как в аналоговом, так и цифровом виде, см., например, соответственно Пенин П.И., Филиппов Л.И. Радиотехнические системы передачи информации, М., Радио и Связь, 1984, стр.6-10 или Пенин П.И. Системы передачи цифровой информации, М., Сов. Радио, 1976, стр.17-24. Учитывая, что объем передаваемой информации и скорость ее передачи крайне низки, а расстояние передачи незначительно, по мнению заявителя, возможно использовать с незначительными доработками пульт дистанционного управления телевизора или мобильный телефон, которые широко известны. К тому же последний уже широко используется в течение длительного времени в качестве линии передачи информации: режим GPRS для мобильного Internet, охранная система GSM- адрес в Internet-http://www.zummer.ru/zummer.php?p=about. Перемещение и позиционирование кареток 2 по вертикальным стойкам 1 может осуществляться, например, с помощью зубчатой линейной передачи, расположенной на вертикальных стойках 1, каретках 2 и узлах перемещения каретки 16. Верхний узел вращения 5 представляет собой в случае осуществления механического привода вращения на нижний узел вращения 9 обычный подшипник, закрепленный на верхнем основании 3, а в случае осуществления привода вращения на верхний узел вращения 5 может быть выполнен, как указывалось ранее, по принципу АПУ РЛС. Узел перемещения каретки 16 представляет собой электродвигатель с редуктором. Излучатель сигнала 14 может представлять собой рупорный излучатель для радиочастотного диапазона имитирующей цели либо источник светового излучения при работе с соответствующей ГС. Блок формирования сигналов 13 представляет собой в простейшем случае набор коммутируемых и управляемых по частоте и амплитуде генераторов сигналов либо синтезатор частот, см. например, Шапиро Д.Н., Панин А.А. Основы теории синтеза частот, М., Радио и Связь, 1981.
Предложенный двухстепенной динамический имитатор целей позволяет расширить возможности стенда полунатурного моделирования за счет повышения радиообзора цели до 180° в вертикальных плоскостях, и до 360° в горизонтальной плоскости. При этом точность позицирования повышается до 0,25°/мин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2015 |
|
RU2593258C1 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Имитатор цели с механическим доворотом | 2018 |
|
RU2690965C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| РАДИОИМИТАТОР ЦЕЛЕЙ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2349862C2 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2753592C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |

Изобретение относится к области испытательной техники и может быть использовано при комплексном полунатурном моделировании функционирования авиационных и космических объектов. Технический результат - повышение достоверности оценки результатов испытаний. Имитатор содержит последовательно соединенные блок формирования сигналов и излучатель сигналов, закрепленный на перемещающейся каретке. При этом имитатор снабжен дополнительными каретками с излучателями сигналов и вертикальными стойками, верхним основанием, верхним узлом вращения, верхней осью вращения, нижним основанием, нижним узлом вращения, последовательно включенными пультом управления вращением, электроприводом и механическим приводом вращения, соединенным с верхним или нижним узлами вращения, блоком управления перемещением кареток, приемным блоком линии передачи команд управления, первые выходы которого подключены к соответствующим управляющим входам блока формирования сигналов, а вторые выходы - к управляющим входам соответствующих узлов перемещения каретки. Кроме того, имитатор снабжен последовательно соединенными блоком управления излучением и передающим блоком линии передачи команд управления, второй вход которого подключен к выходу блока управления перемещением кареток. Причем входы излучателей сигналов подключены к соответствующим выходам блока формирования сигналов, верхние концы вертикальных стоек соединены друг с другом и в месте их соединения закреплена вертикальная ось вращения, входящая в верхний узел вращения, закрепленный на верхнем основании, нижние концы вертикальных стоек укреплены в подвижной части нижнего узла вращения, неподвижная часть которого закреплена на нижнем основании. При этом приемный блок линии передач команд управления и блок формирования сигналов расположены на вращающейся части двухстепенного динамического имитатора целей, а каждая из кареток размещена на вертикальной стойке. 5 з.п. ф-лы, 3 ил.
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| Счетчик вылета пчел из улья | 1928 |
|
SU11626A1 |
| US 4751662 А, 14.06.1988 | |||
| US 3883961 A, 20.05.1975 | |||
| FR 7824728 A1, 27.08.1977. | |||

