Область техники, к которой относится изобретение
Настоящее изобретение относится к вибрационному датчику и способу изменения вибрации в вибрационном датчике.
Уровень техники
Постановка задачи
Вибрационные датчики, такие как вибрационные денситометры и вибрационные вискозиметры, работают посредством обнаружения движения вибрирующего элемента, который вибрирует в присутствие текучей среды, характеристики которой получают. Свойства, ассоциированные с текучей средой, такие как плотность, вязкость, температура и т.п., могут быть определены посредством обработки вибрационного сигнала или сигналов, принимаемых от одного или нескольких датчиков перемещения, связанных с вибрирующим элементом. На вибрацию вибрирующего элемента оказывает воздействие, в основном, суммарная масса, жесткость и характеристики демпфирования вибрирующего элемента в комбинации с текучей средой.
Вязкость текучей среды может измеряться посредством генерирования реакций на вибрационное воздействие на частотах ω1 и ω2, которые находятся выше и ниже резонансной частоты ω0 объединенных текучей среды и вибрационного датчика. На резонансной частоте ω0 разность ϕ0 фаз может составлять около 90 градусов. Две частотные точки ω1 и ω2 определяются как частоты возбуждения, когда фаза сигнала возбуждения и фаза вибрационного сигнала отличаются на разности φ1 и φ2 фаз соответственно. Разность φ1 фаз может определяться как точка, где разность фаз между фазой сигнала возбуждения и фазой вибрационного сигнала составляет около 135 градусов. Разность φ2 фаз может определяться как точка, где разность фаз между фазой сигнала возбуждения и фазой вибрационного сигнала составляет около 45 градусов.
Расстояние между этими двумя частотными точками ω1 и ω2 (т.е. разность частоты между ω1 и ω2) используется для определения члена Q, который пропорционален вязкости и может аппроксимироваться формулой:
вязкость≈Q=ω0/(ω2-ω1)
Резонансная частота ω0 находится по центру между двумя частотными точками ω1 и ω2. Поэтому резонансная частота ω0 может определяться как:
ω0 ≈ 0,5 * (ω2 + ω1)
Частотные точки ω1 и ω2 определяются во время работы, когда элемент датчика взаимодействует с текучей средой, характеристики которой получают. Чтобы надлежащим образом определить частотные точки ω1 и ω2, система возбуждения известного уровня техники использует возбуждение по замкнутому циклу, возбуждая элемент датчика периодически изменяться между двумя точками разности фаз (φ1 и φ2) и регистрируя частоты ω1 и ω2 вибрации в этих точках. Посредством использования возбуждения по замкнутому циклу система возбуждения известного уровня техники гарантирует, что измерение разности фаз является стабильным, когда определяются частоты ω1 и ω2 вибрации.
Альтернативно частотные точки ω1 и ω2 определяются как точки половинной мощности, так как они содержат частотные точки, где мощность вибрационного сигнала имеет половину мощности резонансной частоты ω0, или где амплитуда Ahalf точки половинной мощности равна (Ahalf=A0/√2). Член A0 представляет собой амплитуду вибрационного сигнала на резонансной частоте ω0. Две частотные точки ω1 и ω2 также известны как точки 3дБ, где мощность вибрационного сигнала на 3 дБ ниже мощности на резонансной частоте.
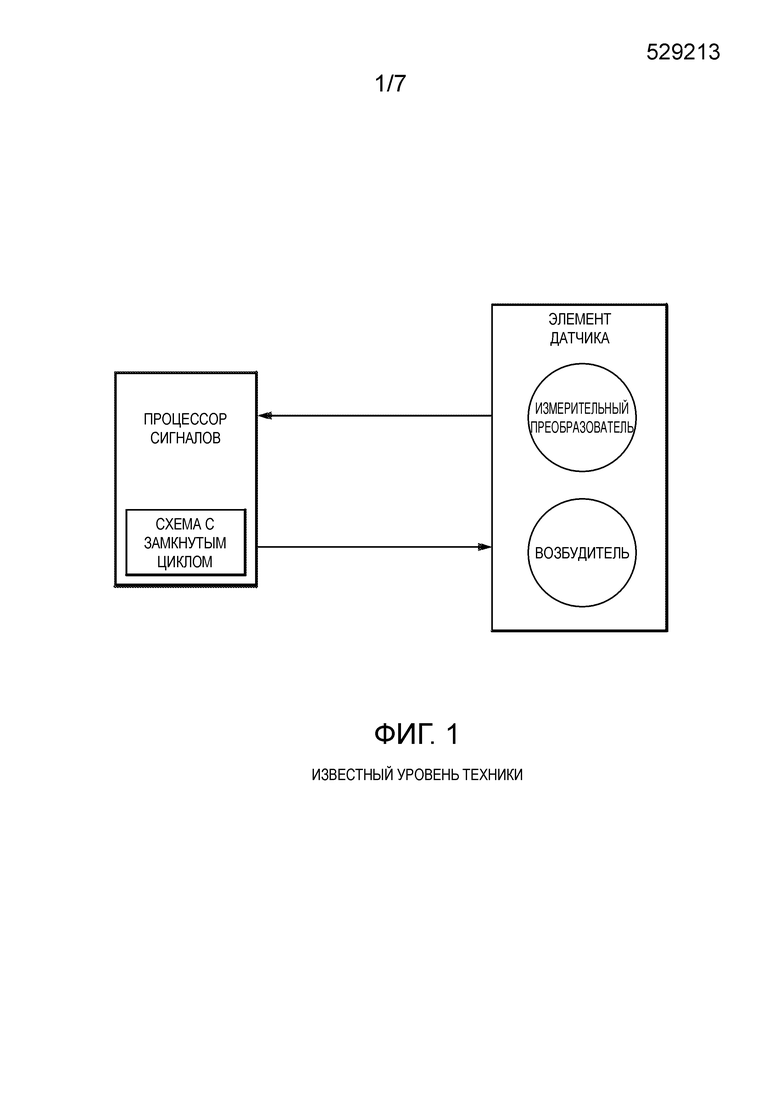
Фиг.1 изображает вибрационный датчик известного уровня техники, содержащий элемент вибрационного датчика и процессор сигналов, соединенный с элементом датчика. Вибрационный датчик известного уровня техники включает в себя возбудитель для побуждения вибрации элемента датчика и датчик измерительного преобразователя, который создает вибрационный сигнал в ответ на вибрацию. Вибрационный сигнал является синусоидальным по своей природе. Процессор сигналов принимает вибрационный сигнал и обрабатывает вибрационный сигнал для генерирования одной или нескольких характеристик текучей среды или измерений текучей среды. Процессор сигналов определяет как частоту, так и амплитуду вибрационного сигнала. Частота и амплитуда вибрационного сигнала могут быть дополнительно обработаны для определения плотности текучей среды или могут быть обработаны для определения дополнительных или других характеристик текучей среды, таких как вязкость.
Процессор сигналов известного уровня техники генерирует сигнал возбуждения для возбудителя, используя схему возбуждения по замкнутому циклу. Сигнал возбуждения обычно основывается на принимаемом вибрационном сигнале, причем схема возбуждения по замкнутому циклу известного уровня техники обрабатывает принимаемый вибрационный сигнал для получения сигнала возбуждения. Сигнал возбуждения может основываться на частоте и амплитуде принимаемого вибрационного сигнала, причем принимаемый вибрационный сигнал содержит обратную связь, которая позволяет системе возбуждения известного уровня техники достигать целевой вибрации. Вибрационный датчик известного уровня техники возбуждает элемент датчика, используя возбуждение по замкнутому циклу и используя элемент обратной связи, причем возбуждение по замкнутому циклу изменяет шагами частоту возбуждения и контролирует элемент обратной связи до тех пор, пока не будет достигнута требуемая целевая точка. Требуемая конечная точка содержит разность (φ) фаз между сигналом возбуждения и результирующим сигналом измерительного преобразователя, достигая разности φ1 фаз или разности φ2 фаз.
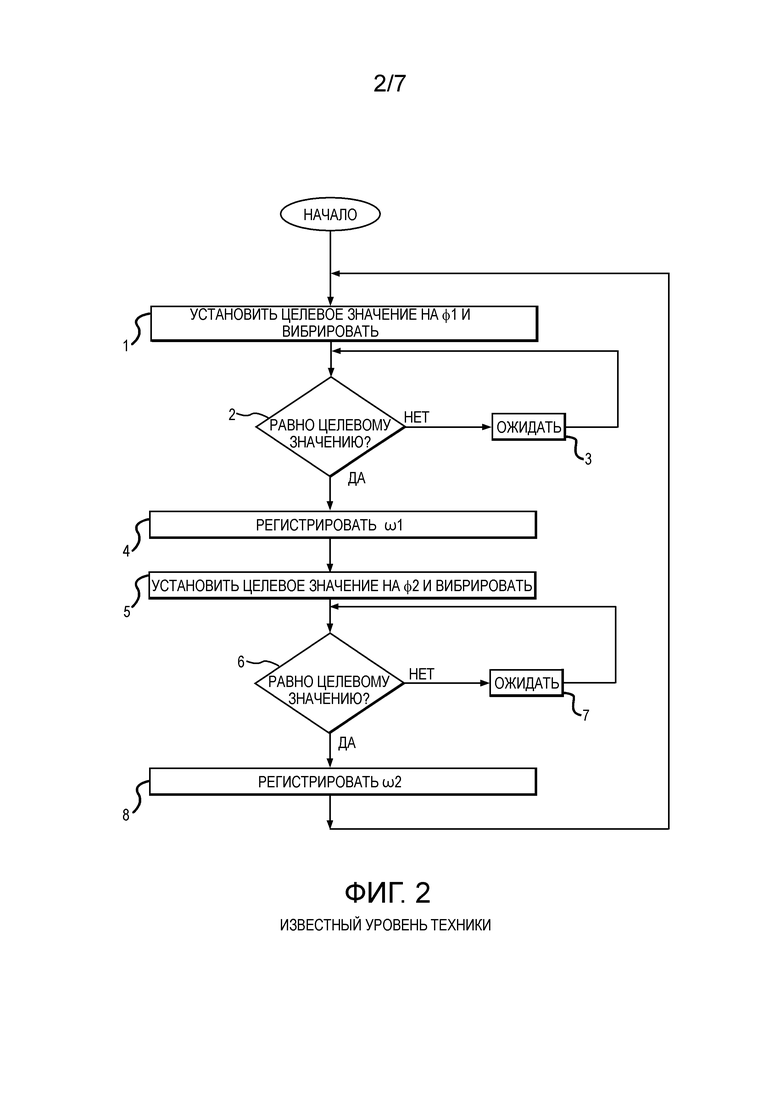
Фиг.2 представляет собой блок-схему последовательности операций способа работы вибрационного датчика известного уровня техники для измерения вязкости текучей среды. Этапы 1-4 ниже определяют частоту первой частотной точки ω1, тогда как этапы 5-8 определяют частоту второй частотной точки ω2.
На этапе 1 заданное значение вибрации устанавливается на первую целевую разность φ1 фаз, и элемент датчика вибрирует с текущей частотой вибрации. Первая целевая разность φ1 фаз достигается изменением частоты сигнала возбуждения, начиная с текущей частоты вибрации. Текущая частота вибрации постепенно изменяется по замкнутому циклу и в соответствии с принимаемой обратной связью, такой как обратная связь, касающаяся разности между текущей разностью фаз и целевой разностью фаз. Частота вибрации шагами увеличивается или уменьшается с текущей частоты вибрации в зависимости от того, должна ли разность фаз увеличиваться или уменьшаться.
На этапе 2 текущая разность фаз сравнивается с первой целевой разностью φ1 фаз. Если первая целевая разность φ1 фаз была достигнута, тогда способ переходит на этап 4. В противном случае способ ответвляется на этап 3 до тех пор, пока не будет достигнута первая целевая разность φ1 фаз.
На этапе 3 выполняется ожидание. Поэтому способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Вибрационный датчик известного уровня техники поэтому ожидает достижения фактической вибрацией элемента датчика заданного значения вибрации. Вследствие работы возбуждения по замкнутому циклу элемент датчика не достигает вибрации с заданным значением вибрации до тех пор, пока не пройдет по меньшей мере известное время ожидания.
Ожидание может быть в течение фиксированного заданного времени или может изменяться по продолжительности. Окружающие условия могут потребовать более продолжительного времени, чем ожидаемое время, для достижения целевой разности фаз. Длительность ожидания может зависеть от различных факторов. Длительность ожидания может зависеть от протяженности до целевой разности фаз от начальной разности фаз. Длительность ожидания может зависеть от физических характеристик элемента датчика. Длительность ожидания может зависеть от сущности измеряемой текучей среды (включая плотность и/или вязкость текучей среды). Длительность ожидания может зависеть от мощности, доступной для вибрационного датчика известного уровня техники.
На этапе 4, когда достигается заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует первой разности φ1 фаз, тогда регистрируется соответствующая первая частота ω1 вибрации. Первая частотная точка ω1 содержит частоту вибрации, которая генерирует первую целевую разность φ1 фаз. Первая частота ω1 вибрации может содержать частоту, на которой разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет, например, около 135 градусов.
На этапе 5 заданное значение вибрации устанавливается на вторую целевую разность φ2 фаз, и элемент датчика вибрирует с текущей частотой вибрации. Вторая целевая разность φ2 фаз достигается посредством изменения частоты сигнала возбуждения, начиная с текущей частоты вибрации. Текущая частота вибрации постепенно изменяется по замкнутому циклу и в соответствии с принимаемой обратной связью, такой как обратная связь, касающаяся разности между текущей разностью фаз и целевой разностью фаз. Частота вибрации шагами увеличивается или уменьшается с текущей частоты вибрации в зависимости от того, должна ли разность фаз увеличиваться или уменьшаться. Следует понимать, что начальной частотой вибрации поэтому является текущая частота вибрации, которая содержит частоту вибрации, полученную выше на этапе 4.
На этапе 6 текущая разность фаз сравнивается со второй целевой разностью φ2 фаз. Если была достигнута вторая целевая разность φ2 фаз, тогда способ переходит на этап 8. В противном случае способ ответвляется на этап 7 до тех пор, пока не будет достигнута вторая целевая разность φ2 фаз.
На этапе 7 выполняется ожидание. Следовательно, способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Вследствие работы возбуждения по замкнутому циклу элемент датчика не достигает вибрации с заданным значением вибрации до тех пор, пока не пройдет по меньшей мере известное время ожидания, как описано выше.
На этапе 8, когда достигается заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует второй разности φ2 фаз, тогда регистрируется соответствующая вторая частотная точка ω2. Вторая частотная точка ω2 содержит частоту вибрации, которая генерирует вторую целевую разность φ2 фаз. Вторая частотная точка ω2 может содержать частоту, на которой разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет, например, около 45 градусов.
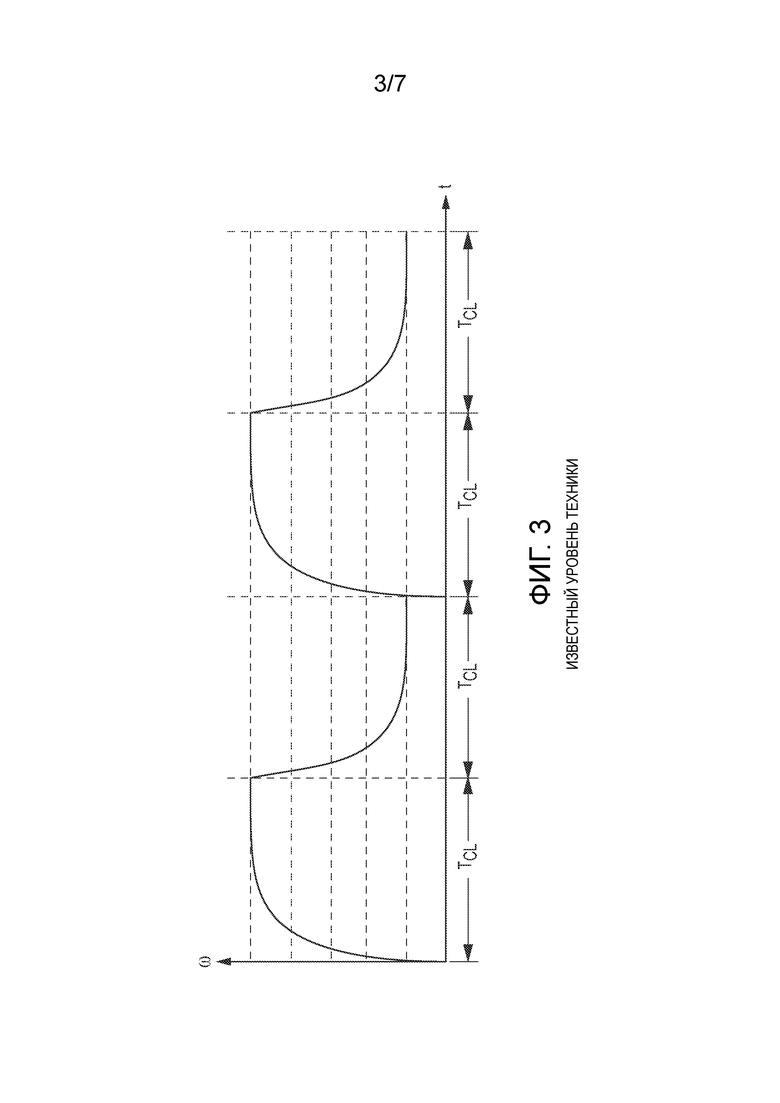
Фиг.3 представляет собой график реакции на вибрационное воздействие по замкнутому циклу вибрационного датчика известного уровня техники на фиг.1. Вертикальная ось представляет частоту (ω) вибрации, и горизонтальная ось представляет время (t). Можно видеть, что вибрационный датчик известного уровня техники попеременно вибрирует с первой частотной точкой ω1 и затем со второй частотной точкой ω2, причем эта схема многократно повторяется. Следует понимать, что первая и вторая частотные точки ω1 и ω2 не являются обязательно постоянными. Первая и вторая частоты ω1 и ω2 вибрации могут меняться вследствие изменений текучей среды, характеристики которой получают, например, посредством вибрационного датчика.
Вследствие конструкции с замкнутым циклом узла возбуждения вибрационного датчика известного уровня техники можно видеть, что фактическая частота вибрации меняется плавно и непрерывно, но медленно. Каждое изменение частоты возбуждения требует завершения периода TCL времени замкнутого цикла, вследствие обратной связи, используемой для достижения целевой разности фаз. В результате вибрационный камертонный датчик известного уровня техники не может измерять быстрые изменения ω1 и ω2 и поэтому не может измерять быстрые изменения вязкости текучей среды, характеристики которой получают. Кроме того, даже когда период TCL времени небольшой, можно видеть, что период TCL времени повторяется и поэтому будет суммироваться и оказывать влияние на работу вибрационного датчика известного уровня техники.
Сущность изобретения
В одном аспекте изобретения вибрационный датчик содержит:
вибрационный элемент, выполненный с возможностью генерирования вибрационного сигнала; и
схему приемника, которая принимает вибрационный сигнал от вибрационного элемента; и
схему возбуждения, соединенную со схемой приемника и вибрационным элементом и генерирующую сигнал возбуждения, который побуждает вибрацию вибрационного элемента, причем схема возбуждения побуждает вибрацию вибрационного элемента, начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определяет соответствующую первую частотную точку ω1, вибрирует вибрационный элемент, начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности φ2 фаз, и определяет соответствующую вторую частотную точку ω2, и определяет вязкость текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Предпочтительно, что вибрационный датчик многократно выполняет этапы вибрирования и определения.
Предпочтительно, что заданная первая частота содержит первую частотную точку ω1time=(t-1) предыдущего момента времени, и заданная вторая частота содержит вторую частотную точку ω2time=(t-1) предыдущего момента времени.
Предпочтительно, что схема возбуждения содержит возбуждение по замкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз и начинается с текущей частоты вибрации, и возбуждение по разомкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз и начинается с заданной первой или второй частоты.
Предпочтительно, что побуждение вибрации вибрационного элемента вибрационного датчика по разомкнутому циклу содержит установку схемой возбуждения заданного значения вибрации на первую целевую разность φ1 фаз, вибрацию схемой возбуждения вибрационного элемента по разомкнутому циклу и с заданной первой частотой, сравнение схемой возбуждения текущей первой разности фаз с первой целевой разностью φ1 фаз и ожидание до тех пор, пока текущая первая разность фаз не станет, по существу, равной первой целевой разности φ1 фаз, если текущая первая разность фаз равна первой целевой разности φ1 фаз, тогда регистрацию схемой возбуждения соответствующей первой частотной точки ω1, причем достижение первой целевой разности φ1 фаз генерирует первую частотную точку ω1 в вибрационном элементе, установку схемой возбуждения заданного значения вибрации на вторую целевую разность φ2 фаз, побуждение вибрации схемой возбуждения вибрационного элемента по разомкнутому циклу и с заданной второй частотой, сравнение схемой возбуждения текущей второй разности фаз со второй целевой разностью φ2 фаз и ожидание до тех пор, пока текущая вторая разность фаз не станет, по существу, равной второй целевой разности φ2 фаз, и, если текущая вторая разность фаз равна второй целевой разности φ2 фаз, тогда регистрацию схемой возбуждения соответствующей второй частотной точки ω2, причем достижение второй целевой разности φ2 фаз генерирует вторую частотную точку ω2 в вибрационном элементе.
Предпочтительно, что схема возбуждения дополнительно выполнена с возможностью побуждения вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определения соответствующей первой частотной точки ω1, причем вибрация начинается на текущей частоте вибрации, и вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, и определения соответствующей второй частотной точки ω2, причем вибрация начинается на текущей частоте вибрации.
Предпочтительно, что схема возбуждения выбирает работу по разомкнутому циклу, если текучая среда, характеристики которой получают, является, по существу, стабильной.
Предпочтительно, что схема возбуждения дополнительно выполнена с возможностью побуждения вибрации вибрационного элемента, начиная с заданной первой частоты и по разомкнутому циклу для приближения к первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз и определения соответствующей первой частотной точки ω1, побуждения вибрации вибрационного элемента, начиная с заданной второй частоты и по разомкнутому циклу для приближения ко второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз и определения соответствующей второй частотной точки ω2, и определения вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Предпочтительно, что схема приемника подсоединена к схеме возбуждения, причем схема приемника подает амплитуду вибрационного сигнала и частоту вибрационного сигнала на схему возбуждения, причем схема возбуждения генерирует сигнал возбуждения для вибрационного элемента, используя амплитуду вибрационного сигнала и частоту вибрационного сигнала.
Предпочтительно, что вибрационный датчик содержит вибрационный камертонный датчик, и вибрационный элемент содержит конструкцию камертонного типа.
В одном аспекте изобретения способ изменения вибрации в вибрационном датчике содержит:
побуждение вибрации вибрационного элемента вибрационного датчика, начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определение соответствующей первой частотной точки ω1;
побуждение вибрации вибрационного элемента, начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности φ2 фаз, и определение соответствующей второй частотной точки ω2; и
определение вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Предпочтительно, что способ многократно выполняет этапы вибрации и определения.
Предпочтительно, что заданная первая частота содержит первую частотную точку ω1time=(t-1) предыдущего момента времени, и заданная вторая частота содержит вторую частотную точку ω2time=(t-1) предыдущего момента времени.
Предпочтительно, что побуждение вибрации вибрационного элемента по разомкнутому циклу содержит установку заданного значения вибрации на первую целевую разность φ1 фаз, побуждение вибрации вибрационного элемента по разомкнутому циклу и с заданной первой частотой, сравнение текущей первой разности фаз с первой целевой разностью φ1 фаз и ожидание до тех пор, пока текущая первая разность фаз не станет, по существу, равной первой целевой разности φ1 фаз, если текущая первая разность фаз равна первой целевой разности φ1 фаз, тогда регистрацию соответствующей первой частотной точки ω1, причем достижение первой целевой разности φ1 фаз генерирует первую частотную точку ω1 в вибрационном элементе, установку заданного значения вибрации на вторую целевую разность φ2 фаз, побуждение вибрации вибрационного элемента по разомкнутому циклу и с заданной второй частотой, сравнение текущей второй разности фаз со второй целевой разностью φ2 фаз и ожидание до тех пор, пока текущая вторая разность фаз, по существу, не станет равной второй целевой разности φ2 фаз, и, если текущая вторая разность фаз равна второй целевой разности φ2 фаз, тогда регистрацию соответствующей второй частотной точки ω2, причем достижение второй целевой разности φ2 фаз генерирует вторую частотную точку ω2 в вибрационном элементе.
Предпочтительно, что способ дополнительно содержит предварительные этапы побуждения вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определения соответствующей первой частотной точки ω1, причем вибрация начинается на текущей частоте вибрации, и вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, и определения соответствующей второй частотной точки ω2, причем вибрация начинается с текущей частотой вибрации.
Предпочтительно, что способ выбирает работу по разомкнутому циклу, если текучая среда, характеристики которой получают, является, по существу, стабильной.
Предпочтительно, что способ содержит побуждение вибрации вибрационного элемента, начиная с заданной первой частотой и по разомкнутому циклу для приближения к первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, побуждение вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз и определение соответствующей первой частотной точки ω1, побуждение вибрации вибрационного элемента, начиная с заданной второй частоты и по разомкнутому циклу для приближения ко второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, побуждение вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз и определение соответствующей второй частотной точки ω2 и определение вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Предпочтительно, что вибрационный датчик содержит вибрационный камертонный датчик, и вибрационный элемент содержит конструкцию камертонного типа.
Краткое описание чертежей
Одинаковые ссылочные позиции представляют одинаковые элементы на всех чертежах. Чертежи приведены необязательно в масштабе.
Фиг.1 изображает вибрационный датчик известного уровня техники, содержащий элемент вибрационного датчика и процессор сигналов, соединенный с элементом датчика.
Фиг.2 представляет собой блок-схему последовательности операций способа работы вибрационного датчика известного уровня техники для измерения вязкости текучей среды.
Фиг.3 представляет собой график реакции на вибрационное воздействие замкнутого цикла вибрационного датчика известного уровня техники на фиг.1.
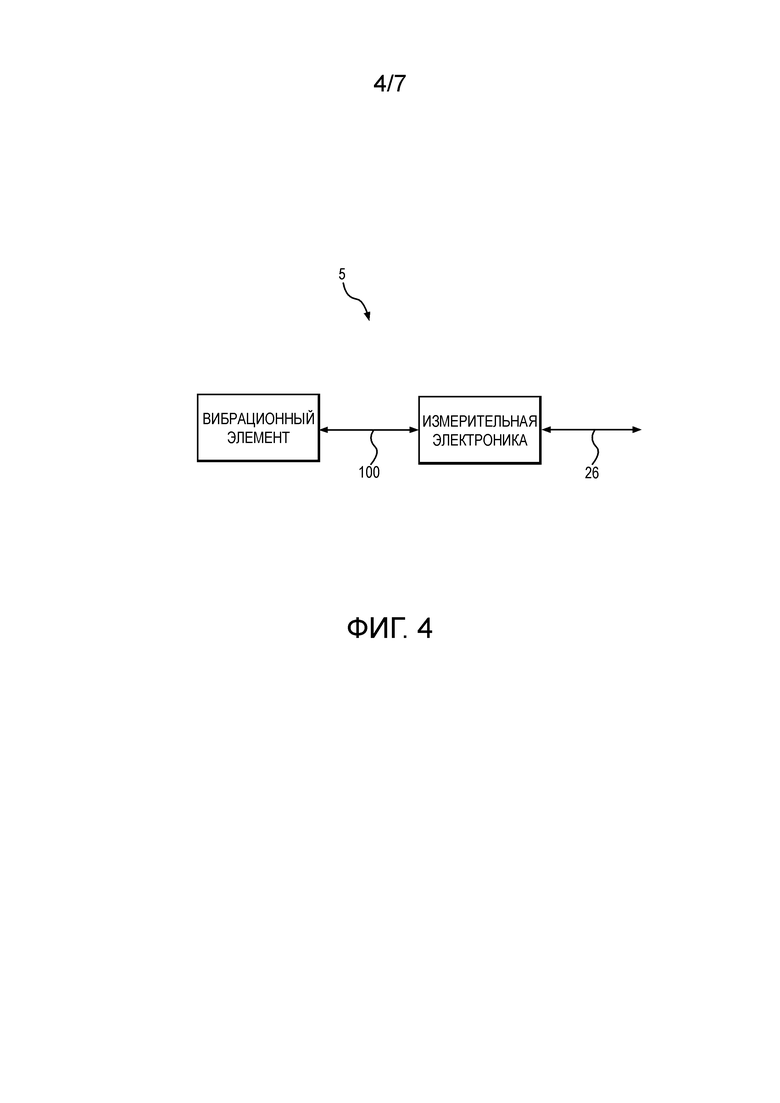
Фиг.4 изображает вибрационный датчик согласно варианту осуществления изобретения.
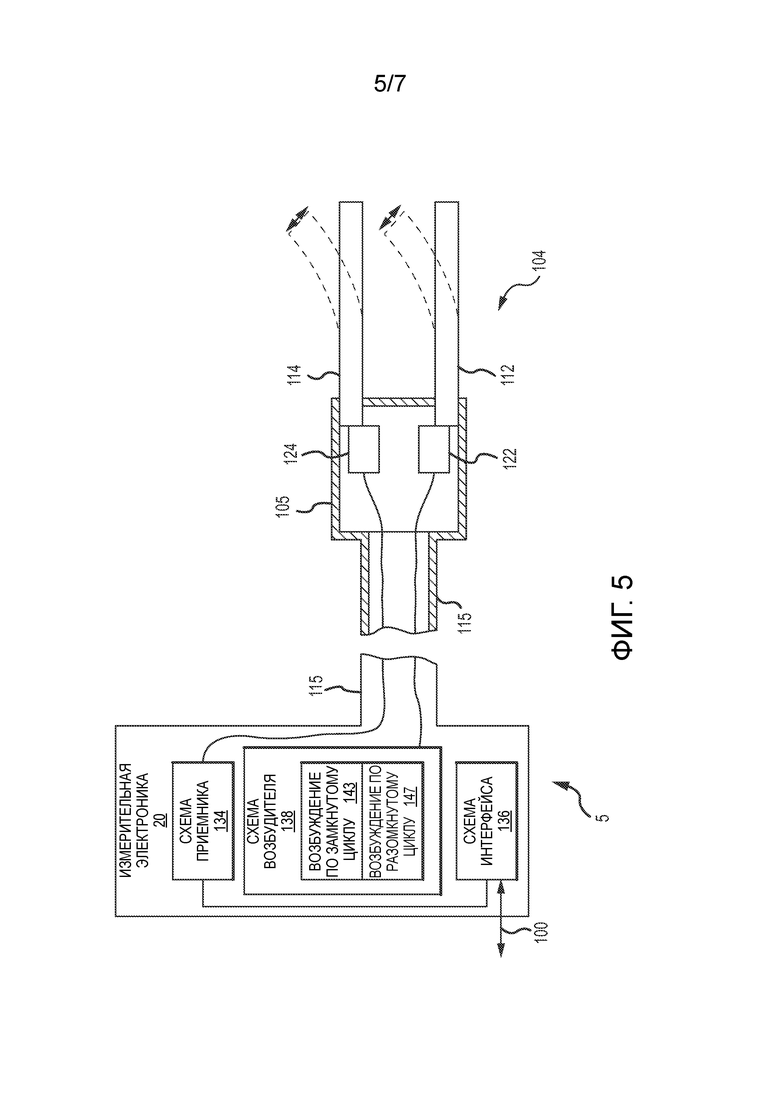
Фиг.5 изображает вибрационный датчик согласно варианту осуществления изобретения.
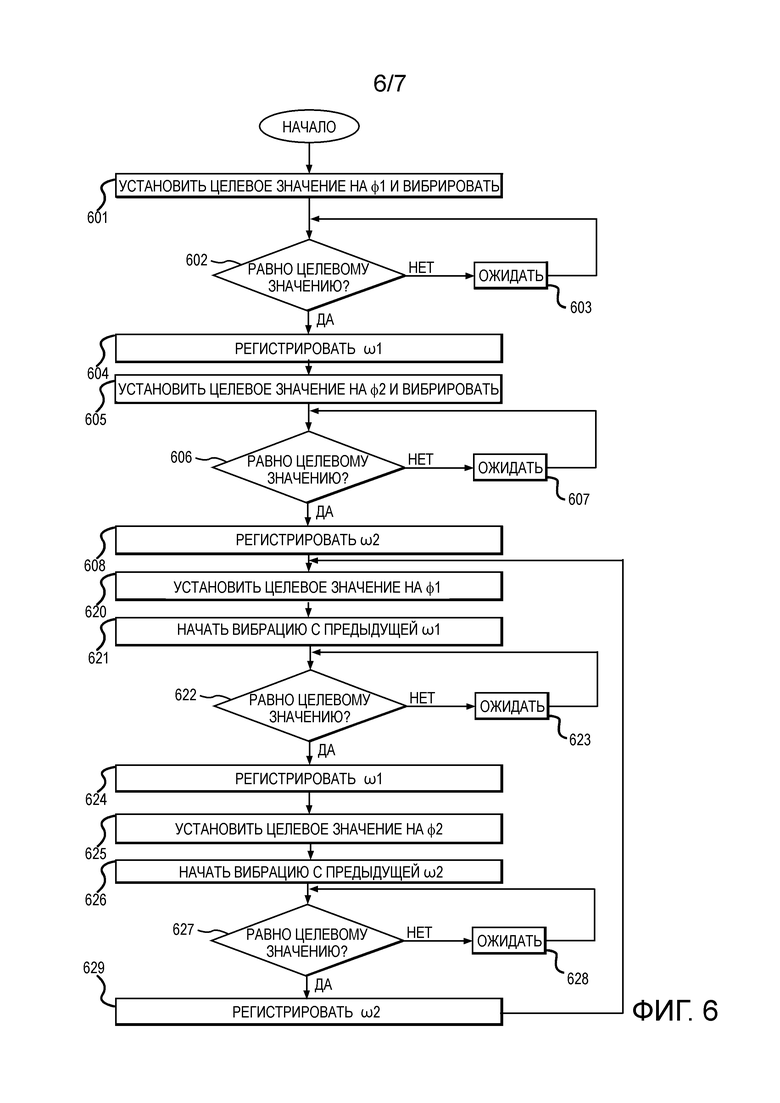
Фиг.6 представляет собой блок-схему последовательности операций способа изменения вибрации в вибрационном датчике согласно варианту осуществления изобретения.
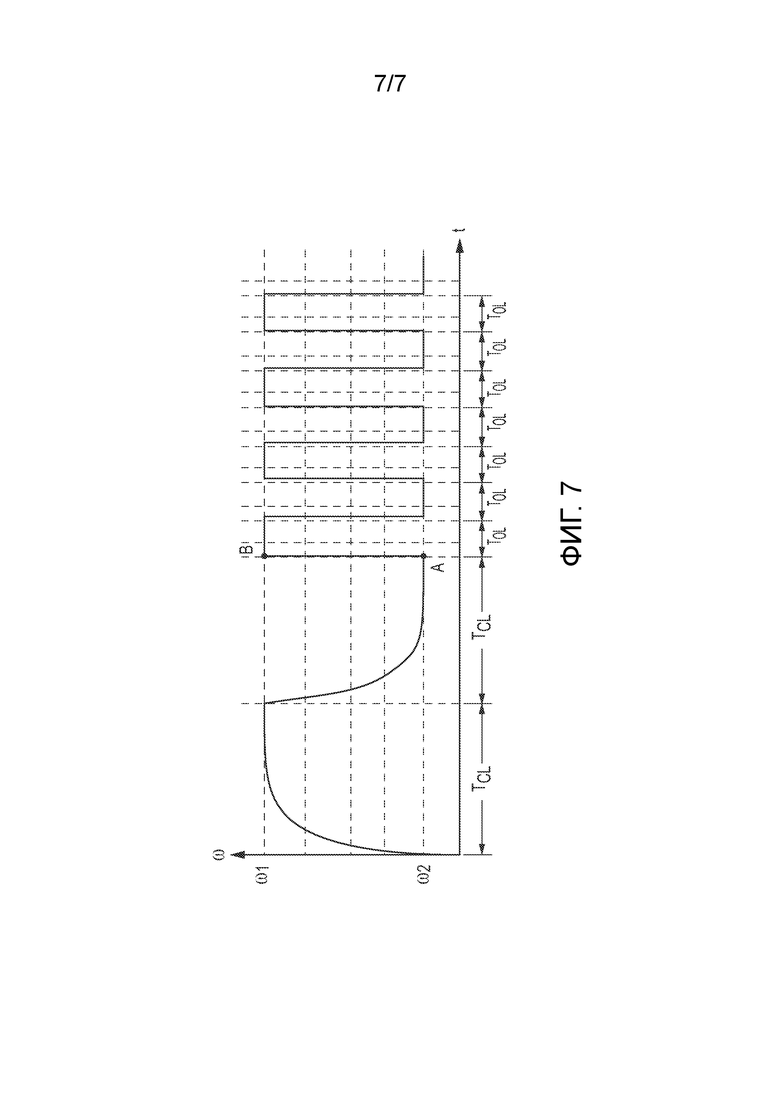
Фиг.7 представляет собой график объединенной реакции на вибрационное воздействие замкнутого цикла и разомкнутого цикла вибрационного датчика.
Осуществление изобретения
Фиг.4-7 и последующее описание изображают конкретные примеры, чтобы предложить идею специалисту в данной области техники как выполнить и использовать наилучший вариант осуществления изобретения. С целью предложения обладающих признаками изобретения принципов некоторые обычные аспекты были упрощены или опущены. Для специалиста в данной области техники понятны варианты из этих примеров, которые подпадают под объем изобретения. Для специалиста в данной области техники понятно, что описанные ниже признаки могут быть объединены различным образом для образования многочисленных вариантов изобретения. В результате изобретение не ограничивается конкретными примерами, описанными ниже, но только формулой изобретения и ее эквивалентами.
Фиг.4 изображает вибрационный датчик 5 согласно варианту осуществления изобретения. Вибрационный датчик 5 может содержать вибрационный элемент 104 и измерительную электронику 20, причем вибрационный элемент 104 соединен с измерительной электроникой 20 посредством проводника или проводников 100. В некоторых вариантах осуществления вибрационный датчик 5 может содержать вибрационный камертонный датчик или вилочный датчик плотности (см. фиг.5 и сопровождающее описание). Однако другие вибрационные датчики предполагаются и находятся в пределах объема описания и формулы изобретения.
Вибрационный датчик 5 может быть, по меньшей мере частично, погружен в текучую среду, характеристики которой получают. Например, вибрационный датчик 5 может быть установлен в трубе или трубопроводе. Вибрационный датчик 5 может быть установлен в баке или контейнере или конструкции для удержания текучей среды. Вибрационный датчик 5 может быть установлен в коллекторе или подобной конструкции для направления потока текучей среды. Однако другие монтажные устройства предполагаются и находятся в пределах объема описания и формулы изобретения.
Текучая среда может содержать жидкость. Текучая среда может содержать газ. Альтернативно текучая среда может содержать многофазную текучую среду, такую как жидкость, которая включает в себя увлеченный газ, увлеченные твердые частицы, многочисленные жидкости или их комбинации.
Вибрационный датчик 5 может работать для обеспечения измерений текучей среды. Вибрационный датчик 5 может обеспечивать измерения текучей среды, включая одно или несколько из плотности текучей среды и вязкости текучей среды для текучей среды, включая протекающие или непротекающие текучие среды. Вибрационный датчик 5 может обеспечивать измерения текучей среды, включая расход жидкой массы, расход жидкого объема и/или температуры текучей среды. Это перечисление не является исчерпывающим и вибрационный датчик 5 может измерять или определять другие характеристики текучей среды.
Измерительная электроника 20 может подавать электрическую энергию на вибрационный элемент 104 по проводнику или проводникам 100. Измерительная электроника 20 может управлять работой вибрационного элемента 104 по проводнику или проводникам 100. Например, измерительная электроника 20 может генерировать сигнал возбуждения и подавать сигнал возбуждения на вибрационный элемент 104, причем вибрационный элемент 104 генерирует вибрацию в одном или нескольких вибрационных компонентах, используя сигнал возбуждения. Сигнал возбуждения может управлять амплитудой вибрации. Сигнал возбуждения может управлять частотой вибрации. Сигнал возбуждения может управлять длительностью вибрации и/или временными соотношениями вибрации.
Измерительная электроника 20 может принимать вибрационный сигнал или сигналы от вибрационного элемента 104 по проводнику или проводникам 100. Измерительная электроника 20 может обрабатывать вибрационный сигнал или сигналы, чтобы генерировать, например, измерение плотности. Следует понимать, что другие или дополнительные измерения могут генерироваться из вибрационного сигнала или сигналов.
Измерительная электроника 20 может обрабатывать вибрационный сигнал или сигналы, принимаемые от вибрационного элемента 104, для определения частоты сигнала или сигналов. Частота может содержать резонансную частоту текучей среды. Резонансная частота может использоваться для определения плотности текучей среды. Кроме того или в дополнение измерительная электроника может обрабатывать вибрационный сигнал или сигналы для определения других характеристик текучей среды, таких как вязкость или сдвиг фазы между сигналами, которые могут обрабатываться для определения, например, расхода текучей среды. Другие характеристики реакции на вибрационное воздействие и/или измерения текучей среды предполагаются и находятся в пределах объема описания и формулы изобретения.
Измерительная электроника 20 может быть дополнительно соединена с линией 26 связи. Измерительная электроника 20 может передавать вибрационный сигнал по линии 26 связи. Измерительная электроника 20 может обрабатывать принимаемый вибрационный сигнал для генерирования значения или значений измерения и может передавать значение или значения измерения по линии 26 связи.
Кроме того, измерительная электроника 20 может принимать информацию по линии 26 связи. Измерительная электроника 20 может принимать команды, обновления, функциональные значения или изменения функциональных значений и/или обновления или изменения программирования по линии 26 связи.
Фиг.5 изображает вибрационный датчик 5 согласно варианту осуществления изобретения. Вибрационный датчик 5 в изображенном варианте осуществления содержит вибрационный камертонный датчик 5, включающий в себя измерительную электронику 20, соединенную с вибрационным элементом 104 посредством стержня 115 в изображенном варианте осуществления. Стержень 115 может быть любой требуемой длины. Стержень 115 может быть по меньшей мере частично,полым, и провода или другие проводники могут проходить между измерительной электроникой 20 и вибрационным элементом 104 по стержню 115.
Измерительная электроника 20 может включать в себя схемные компоненты, такие как схему 134 приемника, схему 138 возбуждения и схему 136 интерфейса в изображенном варианте осуществления.
В изображенном варианте осуществления схема 134 приемника и схема 138 возбуждения непосредственно соединены с проводниками вибрационного элемента 104 в изображенном варианте осуществления. Альтернативно измерительная электроника 20 может содержать отдельный компонент или устройство от вибрационного элемента 104, причем схема 134 приемника и схема 138 возбуждения соединены с вибрационным элементом 104 посредством проводника или проводников 100, как показано на фиг.4.
Вибрационный элемент 104 вибрационного датчика 5 в изображенном варианте осуществления содержит конструкцию 104 камертонного типа, причем вибрационный элемент 104 по меньшей мере частично погружен в измеряемую текучую среду. Вибрационный элемент 104 включает в себя корпус 105, который может быть прикреплен к другой конструкции, такой как труба, трубопровод, бак, резервуар, коллектор или любой другой конструкции для транспортировки и хранения текучей среды. Корпус 105 поддерживает вибрационный элемент 104, когда вибрационный элемент 104 остается по меньшей мере частично открытым. Вибрационный элемент 104 поэтому выполнен с возможностью погружения в текучую среду.
Вибрационный элемент 104 в изображенном варианте осуществления включает в себя первую и вторую ножку 112 и 114, которые выполнены так, что проходят по меньшей мере частично в текучую среду. Первая и вторая ножки 112 и 114 содержат удлиненные элементы, которые могут иметь любую требуемую форму поперечного сечения. Первая и вторая ножки 112 и 114 могут быть по меньшей мере частично гибкими или упругими по своей сущности.
Вибрационный датчик 5 дополнительно включает в себя соответствующие первый и второй пьезоэлементы 122 и 124, которые содержат элементы пьезоэлектрического кристалла. Первый и второй пьезоэлементы 122 и 124 располагаются рядом с первой и второй ножками 112 и 114 соответственно. Первый и второй пьезоэлементы 122 и 124 выполнены с возможностью соприкосновения и механического взаимодействия с первой и второй ножками 112 и 114.
Первый пьезоэлемент 122 может соприкасаться с по меньшей мере участком первой ножки 112. Первый пьезоэлемент 122 может быть электрически соединен со схемой 138 возбуждения, причем схема 138 возбуждения подает изменяющийся во времени сигнал возбуждения на первый пьезоэлемент 122. Первый пьезоэлемент 122 может расширяться и сжиматься, когда он подвергается действию изменяющегося во времени сигнала возбуждения. В результате первый пьезоэлемент 122 может попеременно деформироваться и смещать первую ножку 112 из стороны в сторону колебательным движением (смотрите пунктирные линии), возмущая текучую среду периодическим, возвратно-поступательным образом.
Второй пьезоэлемент 124 может быть соединен со схемой 134 приемника, которая создает изменяющийся во времени сигнал реакции на вибрационное воздействие, соответствующий деформациям второй ножки 114 в текучей среде. Движение второй ножки 114 поэтому может вызывать соответствующий электрический вибрационный сигнал, генерируемый вторым пьезоэлементом 124. Второй пьезоэлемент 124 передает вибрационный сигнал на измерительную электронику 20. Измерительная электроника 20 обрабатывает вибрационный сигнал и может измерять амплитуду вибрационного сигнала и/или частоту вибрационного сигнала вибрационного сигнала.
Измерительная электроника 20 может включать в себя схему 136 интерфейса. Схема 136 интерфейса может быть выполнена с возможностью выполнения связи с внешними устройствами. Схема 136 интерфейса может передавать вибрационный измерительный сигнал или сигналы и может передавать определенные характеристики текучей среды на одно или несколько внешних устройств. Измерительная электроника 20 может передавать характеристики вибрационного сигнала посредством схемы 136 интерфейса, такие как частота вибрационного сигнала и/или амплитуда вибрационного сигнала вибрационного сигнала. Измерительная электроника 20 может передавать измерения текучей среды посредством схемы 136 интерфейса, между прочим, такие как плотность и/или вязкость текучей среды. Другие измерения текучей среды предполагаются и находятся в пределах объема описания и формулы изобретения. Кроме того, схема 136 интерфейса может принимать связь от внешних устройств, включая команды и данные, например, для генерирования значений измерения.
В некоторых вариантах осуществления схема 134 приемника подсоединена ко схеме 138 возбуждения, причем схема 134 приемника подает амплитуду вибрационного сигнала и частоту вибрационного сигнала на схему 138 возбуждения, причем схема 138 возбуждения генерирует сигнал возбуждения для вибрационного элемента 104, используя амплитуду вибрационного сигнала и частоту вибрационного сигнала.
Схема 138 возбуждения может принимать вибрационный сигнал и может генерировать сигнал возбуждения из вибрационного сигнала и может модифицировать характеристики вибрационного сигнала, чтобы генерировать сигнал возбуждения. Вибрационный элемент 104, в основном, поддерживается на резонансной частота, когда на него воздействует окружающая текучая среда. Вибрационный элемент 104 обычно поддерживается на резонансной частоте схемой 138 возбуждения. Схема 138 возбуждения может модифицировать вибрационный сигнал для получения требуемого вибрационного возмущающего воздействия в текучей среде. Схема 138 возбуждения дополнительно может модифицировать вибрационный сигнал для компенсации длины проводников между измерительной электроникой 20 и вибрационным элементом 104 и/или для компенсации, например, других потерь в вибрационном сигнале.
Схема 138 возбуждения может включать в себя возбуждение 143 по замкнутому циклу и возбуждение 147 по разомкнутому циклу. Любое одно из возбуждения 143 по замкнутому циклу или возбуждения 147 по разомкнутому циклу может использоваться схемой 138 возбуждения для генерирования сигнала возбуждения и подачи сигнала возбуждения на вибрационный элемент 104 (т.е. на первый пьезоэлемент 122).
Возбуждение 143 по замкнутому циклу генерирует сигнал возбуждения по замкнутому циклу, причем возбуждение 143 по замкнутому циклу использует вибрационный сигнал, принимаемый от вибрационного элемента 104 (т.е. от второго пьезоэлемента 124) для генерирования сигнала возбуждения. Возбуждение 143 по замкнутому циклу поэтому работает на основе обратной связи и алгоритма обратной связи. Обратная связь содержит разность между текущей вибрацией и заданной целевой вибрацией. Сигнал возбуждения плавно и непрерывно изменяется возбуждением 143 по замкнутому циклу до тех пор, пока вибрационный сигнал (т.е. обратная связь) не достигнет целевой вибрации. Поэтому если задается первая частотная точка ω1, возбуждение 143 по замкнутому циклу шагами изменяет от текущей частоты ω2 вибрации до тех пор, пока не будет достигнута в конечном счете целевая вибрация с частотой ω1.
В некоторых вариантах осуществления схема 138 возбуждения содержит возбуждение 143 по замкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз, начиная с текущей частоты вибрации, и возбуждение 147 по разомкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз, начиная с заданной частоты вибрации.
Возбуждение 147 по разомкнутому циклу выполнено с возможностью генерирования сигнала возбуждения на основе заданной целевой вибрации. Поэтому если задается первая частота вибрации, возбуждение 147 по разомкнутому циклу генерирует сигнал возбуждения на первой частоте вибрации, даже когда схема 138 возбуждения выполняла вибрацию вибрационного элемента 104 со второй частотой вибрации. Возбуждение 147 по разомкнутому циклу не работает на основе обратной связи, и возбуждение 147 по разомкнутому циклу поэтому может немедленно вибрировать с заданной целевой вибрацией.
В некоторых вариантах осуществления схема 138 возбуждения вибрирует вибрационный элемент 104, начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определяет соответствующую первую частотную точку ω1, вибрирует вибрационный элемент 104, начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности φ2 фаз, и определяет соответствующую вторую частотную точку ω2, и определяет вязкость текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Следует понимать, что заданные первая и вторая частоты являются только аппроксимациями первой и второй частотных точек ω1 и ω2. Заданные первая и вторая частоты не могут быть точно окончательными значениями фактических первой и второй частотных точек ω1 и ω2, как, например, там, где плотность текучей среды изменяется во времени.
В некоторых вариантах осуществления вибрация вибрационного элемента 104 вибрационного датчика 5 по разомкнутому циклу содержит установку схемой 138 возбуждения заданного значения вибрации на первую целевую разность φ1 фаз, вибрацию схемой 138 возбуждения вибрационного элемента 104, начиная с заданной первой частоты и по разомкнутому циклу, сравнение схемой 138 возбуждения текущей первой разности фаз с первой целевой разностью φ1 фаз и ожидание до тех пор, пока текущая первая разность фаз, по существу, не станет равной первой целевой разности φ1 фаз, если текущая первая разность фаз равна первой целевой разности φ1 фаз, тогда регистрацию схемой 138 возбуждения соответствующей первой частотной точки ω1, причем достижение первой целевой разности φ1 фаз генерирует первую частотную точку ω1 в вибрационном элементе 104, установку схемой 138 возбуждения заданного значения вибрации на вторую целевую разность φ2 фаз, вибрацию схемой 138 возбуждения вибрационного элемента 104, начиная с заданной второй частоты и по разомкнутому циклу, сравнение схемой 138 возбуждения текущей второй разности фаз со второй целевой разностью φ2 фаз и ожидание до тех пор, пока текущая вторая разность фаз, по существу, не станет равной второй целевой разности φ2 фаз, и, если текущая вторая разность фаз равна второй целевой разности φ2 фаз, тогда регистрацию схемой 138 возбуждения соответствующей второй частотной точки ω2, причем достижение второй целевой разности φ2 фаз генерирует вторую частотную точку ω2 в вибрационном элементе 104.
В некоторых вариантах осуществления схема 138 возбуждения выполнена с возможностью вибрации вибрационного элемента 104, начиная с заданной первой частоты и по разомкнутому циклу для приближения к первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, вибрации вибрационного элемента 104 по замкнутому циклу для достижения первой целевой разности φ1 фаз и определения соответствующей первой частотной точки ω1, вибрации вибрационного элемента 104, начиная с заданной второй частоты и по разомкнутому циклу для приближения ко второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, вибрации вибрационного элемента 104 по замкнутому циклу для достижения второй целевой разности φ2 фаз и определения соответствующей второй частотной точки ω2, и определения вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
Контроллер разомкнутого цикла, который также может называться контроллером без обратной связи, вычисляет его ввод в систему, используя только текущее состояние системы и модель системы. Характерной особенностью контроллера разомкнутого цикла является то, что он не использует обратную связь для определения, достиг ли выходной сигнал требуемой цели ввода. Это означает, что система не наблюдает выходной сигнал процессов, которыми она управляет. Следовательно, действительная система с разомкнутым циклом не может корректировать ошибки требуемых и достигаемых величин. Она также не может компенсировать возмущающие воздействия в системе. Однако может использоваться усовершенствованная система с разомкнутым циклом, в которой методология управления может быть самообучающейся и адаптивной. В результате вибрационный датчик согласно любому варианту осуществления может применять или традиционный процесс управления по разомкнутому циклу или может применять процесс адаптивного управления по разомкнутому циклу, в котором используется некоторая обратная связь или внешние значения, чтобы гарантировать, что фактическая разность фаз между фазой сигнала возбуждения и фазой вибрационного сигнала аппроксимируется или близко приближается к целевой разности фаз.
Схема 138 возбуждения заставляет вибрационный элемент 104 вибрировать с частотой вибрации, которая находится близко к требуемой частоте вибрации посредством возбуждения его сигналом возбуждения разомкнутого цикла для вибрации с последним измеренным значением частотной точки. Например, посредством возбуждения датчика с частотой ω1, причем частота получена из последнего измеренного значения ω1 (упоминаемого как ω1time=(t-1)), система возбуждения способна приблизительно определять расположение нового значения первой частотной точки ω1. Если достигнута заданная первая частота, возбуждение может переходить обратно на работу по замкнутому циклу или адаптивную работу по разомкнутому циклу и определять расположение точного значения ω1. Аналогично посредством возбуждения датчика с ω2, причем частота получена из последнего измеренного значения ω2 (упоминаемого как ω2time=(t-1)), система возбуждения способна приблизительно определять расположение нового значения второй частотной точки ω2. Если достигнута заданная вторая частота, возбуждение может переходить обратно на работу по замкнутому циклу или адаптивную работу по разомкнутому циклу и определять расположение точного значения ω2.
Как указано выше, вибрация по исключительно замкнутому циклу может использоваться для инициирования вибрации вибрационного датчика. Затем вибрация может переключаться на вибрацию по разомкнутому циклу или может переключаться на использование объединенной вибрации по разомкнутому циклу и замкнутому циклу, причем часть по разомкнутому циклу итерации значительно сокращает время итерации.
Кроме того или альтернативно измерительная электроника 20 может принимать решение, применять ли вибрацию по разомкнутому циклу, как, например, при каждой итерации, посредством проверки различных окружающих факторов. Например, измерительная электроника 20 может использовать вибрацию по разомкнутому циклу, если текучая среда, характеристики которой получают, является приемлемо стабильной. Измеренная плотность текучей среды может определяться стабильной, если она не изменяется более заданного допуска на плотность в течение заданного периода времени.
Фиг.6 представляет собой блок-схему 600 последовательности операций способа изменения вибрации в вибрационном датчике согласно варианту осуществления изобретения. Этапы 601-604 способа с разомкнутым циклом ниже определяют частоту первой частотной точки ω1 по замкнутому циклу, тогда как этапы 605-608 способа с замкнутым циклом определяют частоту второй частотной точки ω2 по замкнутому циклу. Этапы 620-624 способа с разомкнутым циклом ниже определяют частоту первой частотной точки ω1 по разомкнутому циклу, тогда как этапы 625-629 способа с разомкнутым циклом определяют частоту второй частотной точки ω2 по разомкнутому циклу.
На этапе 601 заданное значение вибрации устанавливается на первую целевую разность φ1 фаз, и выполняется вибрация вибрационного элемента. Целевая разность фаз достигается посредством изменения частоты сигнала возбуждения, начиная с текущей частоты вибрации. Текущая частота вибрации постепенно изменяется по замкнутому циклу и в соответствии с принимаемой обратной связью, такой как обратная связь, касающаяся разности между текущей разностью фаз и целевой разностью фаз. Частота вибрации шагами увеличивается или уменьшается с текущей частоты вибрации в зависимости от того, должна ли разность фаз увеличиваться или уменьшаться.
На этапе 602 текущая разность фаз сравнивается с первой целевой разностью φ1 фаз. Если первая целевая разность φ1 фаз была достигнута, тогда способ переходит на этап 604. В противном случае способ ответвляется на этап 603 до тех пор, пока не будет достигнута первая целевая разность φ1 фаз.
На этапе 603 выполняется ожидание. Следовательно, способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Вибрационный датчик поэтому ожидает до тех пор, пока фактическая вибрация вибрационного элемента не достигнет заданного значения вибрации. Вследствие работы возбуждения по замкнутому циклу вибрационный элемент не достигает вибрации с заданным значением вибрации до тех пор, пока не пройдет по меньшей мере известное время ожидания.
Ожидание может происходить в течение фиксированного заданного времени или может изменяться по продолжительности. Окружающие условия могут потребовать более продолжительного времени, чем ожидалось для достижения целевой разности фаз. Продолжительность ожидания может зависеть от различных факторов. Продолжительность ожидания может зависеть от протяженности до целевой разности фаз от начальной разности фаз. Продолжительность ожидания может зависеть от физических характеристик вибрационного элемента. Продолжительность ожидания может зависеть от сущности измеряемой текучей среды (включая плотность и/или вязкость текучей среды). Продолжительность ожидания может зависеть от мощности, доступной для вибрационного датчика. Если доступная электрическая мощность ограничена, вибрационный датчик может быть не способным быстро изменять до целевой разности фаз и соответствующей частотной точки ω1 или ω2.
На этапе 604, когда будет достигнуто заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует первой разности φ1 фаз, тогда регистрируется соответствующая первая частотная точка ω1. Первая частотная точка ω1 содержит частоту вибрации, которая генерирует первую целевую разность φ1 фаз. Первая частотная точка ω1 содержит частоту, на которой разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет около 135 градусов в некоторых вариантах осуществления.
На этапе 605 заданное значение вибрации устанавливается на вторую целевую разность φ2 фаз, и выполняется вибрация вибрационного элемента с текущей частоты вибрации. Вторая целевая разность φ2 фаз достигается посредством изменения частоты сигнала возбуждения, начиная с текущей частоты вибрации. Текущая частота вибрации постепенно изменяется по замкнутому циклу и в соответствии с принимаемой обратной связью, такой как обратная связь, касающаяся разности между текущей разностью фаз и целевой разностью фаз. Частота вибрации шагами увеличивается или уменьшается с текущей частоты вибрации в зависимости от того, должна ли разность фаз увеличиваться или уменьшаться. Следует понимать, что начальной частотой вибрации поэтому является текущая частота вибрации, которая содержит частоту вибрации, полученную на этапе 604 выше.
На этапе 606 текущая разность фаз сравнивается со второй целевой разностью φ2 фаз. Если вторая целевая разность φ2 фаз была достигнута, тогда способ переходит на этап 608. В противном случае способ ответвляется на этап 607 до тех пор, пока не будет достигнута вторая целевая разность φ2 фаз.
На этапе 607 выполняется ожидание. Следовательно, способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Вследствие работы возбуждения по замкнутому циклу вибрационный элемент не достигает вибрации с заданным значением вибрации до тех пор, пока не пройдет по меньшей мере известное время ожидания, как описано выше.
На этапе 608, когда будет достигнуто заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует второй разности φ2 фаз, тогда регистрируется соответствующая вторая частотная точка ω2. Вторая частотная точка ω2 содержит частоту вибрации, которая генерирует вторую целевую разность φ2 фаз. Вторая частотная точка ω2 в некоторых вариантах осуществления содержит частоту, на которой разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет около 45 градусов в некоторых вариантах осуществления.
Вышеупомянутые этапы 601-608 способа с замкнутым циклом могут содержать начальную или запускающую итерацию для вибрационного расходомера. Этапы 601-608 способа с замкнутым циклом в некоторых вариантах осуществления могут использоваться для генерирования начальных значений первой и второй частотных точек ω1 и ω2. Этапы 601-608 способа с замкнутым циклом могут повторяться один или несколько раз перед тем, как способ перейдет на этапы 620-629 способа с разомкнутым циклом ниже.
На этапе 620 заданное значение вибрации устанавливается на первую целевую разность φ1 фаз.
На этапе 621 выполняется вибрация вибрационного датчика с заданной первой частотой. Следовательно, вибрация вибрационного датчика переходит прерывисто с текущей частоты вибрации (т.е. частоты вибрации, которая была непосредственно перед этим этапом) на значение частоты, определяемое заданной первой частотой. Поэтому следует понимать, что начальная частота вибрации на данном этапе не является текущей частотой вибрации. Вибрация вибрационного датчика поэтому содержит процесс вибрации по разомкнутому циклу, по меньшей мере в течение периода времени. В результате вибрации по разомкнутому циклу результирующая разность фаз немедленно становится близкой (или очень близкой) первой целевой разности φ1 фаз, когда вибрация начинается с заданной первой частотой.
В некоторых вариантах осуществления заданная первая частота содержит первую частотную точку ω1time=(t-1) предыдущего момента времени. Нижний индекс [time=(t-1)] означает, что первая частотная точка ω1 из предыдущего периода времени (в текущей итерации [time=t]). В некоторых вариантах осуществления первая частотная точка ω1time=(t-1) предыдущего момента времени может содержать первую частотную точку ω1, полученную в предыдущей итерации этапа 604 выше, или полученную в предыдущей итерации этапа 624 ниже. Однако следует понимать, что способ не ограничивается непосредственно предыдущим значением частоты, и значение может быть из итерации более давней по времени. Альтернативно первая частотная точка ω1time=(t-1) предыдущего момента времени может содержать идеальное значение, которое было ранее определено или принято и сохранено в вибрационном датчике, такое как ожидаемое значение частоты для заданной текучей среды, характеристики которой получают.
Следует понимать, что после перехода вибрации по разомкнутому циклу на первую частотную точку ω1time=(t-1) предыдущего момента времени вибрация затем может возвратиться на процесс вибрации по замкнутому циклу или процесс адаптивной вибрации по разомкнутому циклу. Обратная связь (или другая или дополнительная информация) может тогда применяться для уточнения вибрации и приближения к первой целевой разности φ1 фаз.
На этапе 622 текущая разность фаз сравнивается с первой целевой разностью φ1 фаз. Если первая целевая разность φ1 фаз была достигнута, тогда способ переходит на этап 624. В противном случае способ ответвляется на этап 623 до тех пор, пока не будет достигнута первая целевая разность φ1 фаз.
На этапе 623 выполняется ожидание. Следовательно, способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Ожидание может происходить в течение фиксированного заданного времени или может изменяться по продолжительности. Продолжительность ожидания может зависеть от различных факторов, таких как протяженность до целевой разности фаз от начальной разности фаз, физических характеристик вибрационного элемента, сущности измеряемой текучей среды (включая плотность и/или вязкость текучей среды) и мощности, доступной для вибрационного датчика. Однако ожидание на этапе 623 будет значительно меньше продолжительности ожидания этапа 603 выше. Так как этап 621 выполняет вибрацию вибрационного датчика по разомкнутому циклу и начинает с частоты, которая является близкой к окончательной частоте, значительно снижается количество времени, необходимое для достижения вибрационным датчиком целевой разности фаз.
На этапе 624, когда будет достигнуто заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует первой разности φ1 фаз, тогда регистрируется соответствующая первая частотная точка ω1. Первая частотная точка ω1 содержит частоту вибрации, которая генерирует первую целевую разность φ1 фаз. Первая частотная точка ω1 содержит частоту, где разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет около 135 градусов в некоторых вариантах осуществления.
Вновь определенная первая частотная точка ω1 в некоторых вариантах осуществления может использоваться в качестве первой частотной точки ω1time=(t-1) предыдущего момента времени в будущей итерации (или итерациях) этапов 620-624 способа с разомкнутым циклом.
На этапе 625 заданное значение вибрации устанавливается на вторую целевую разность φ2 фаз.
На этапе 626 вибрационный датчик вибрирует с заданной второй частотой. Следовательно, вибрация вибрационного датчика переходит прерывисто с текущей частоты вибрации (т.е. частоты вибрации, которая была непосредственно перед этим этапом) на значение частоты, определяемое в заданной второй частоте. Поэтому следует понимать, что начальная частота вибрации на этом этапе не является текущей частотой вибрации. Вибрация вибрационного датчика, поэтому содержит процесс вибрации по разомкнутому циклу, по меньшей мере в течение периода времени. В результате вибрации по разомкнутому циклу результирующая разность фаз находится непосредственно близко (или очень близко) ко второй целевой разности φ2 фаз, когда вибрация начинается с заданной второй частоты.
В некоторых вариантах осуществления заданная вторая частота содержит вторую частотную точку ω2time=(t-1) предыдущего момента времени. Нижний индекс [time=(t-1)] означает, что вторая частотная точка ω2 из предыдущего периода времени (в текущей итерации [time=t]). В некоторых вариантах осуществления вторая частотная точка ω2time=(t-1) предыдущего момента времени может содержать вторую частотную точку ω2, полученную в предыдущей итерации этапа 608 выше, или полученную в предыдущей итерации этапа 629 ниже. Однако следует понимать, что способ не ограничивается непосредственно предыдущим значением частоты, и значение может быть из итерации более давней по времени. Альтернативно вторая частотная точка ω2time=(t-1) предыдущего момента времени может содержать идеальное значение, которое было ранее определено или принято и сохранено в вибрационном датчике, такое как ожидаемое значение частоты для заданной текучей среды, характеристики которой получают.
Необходимо понимать, что после перехода вибрации по разомкнутому циклу на вторую частотную точку ω2time=(t-1) предыдущего момента времени вибрация затем может возвратиться на процесс вибрации по замкнутому циклу или процесс адаптивной вибрации по разомкнутому циклу. Обратная связь (или другая или дополнительная информация) может затем применяться для уточнения вибрации и приближения ко второй целевой разности φ2 фаз.
На этапе 627 текущая разность фаз сравнивается со второй целевой разностью φ2 фаз. Если вторая целевая разность φ2 фаз была достигнута, тогда способ переходит на этап 629. В противном случае способ ответвляется на этап 628 до тех пор, пока не будет достигнута вторая целевая разность φ2 фаз.
На этапе 623 выполняется ожидание. Следовательно, способ зацикливается и ожидает до тех пор, пока не будет достигнуто заданное значение вибрации. Ожидание может происходить в течение фиксированного заданного времени или может изменяться по продолжительности. Продолжительность ожидания может зависеть от различных факторов, таких как протяженность до целевой разности фаз от начальной разности фаз, физических характеристик вибрационного элемента, сущности измеряемой текучей среды (включая плотность и/или вязкость текучей среды) и мощности, доступной для вибрационного датчика. Однако ожидание на этапе 628 будет значительно меньше продолжительности ожидания этапа 607 выше. Так как этап 626 выполняет вибрацию вибрационного датчика по разомкнутому циклу и начинает с частоты, которая находится близко к окончательной частоте, значительно снижается количество времени, необходимое для достижения вибрационным датчиком целевой разности фаз.
На этапе 629, когда будет достигнуто заданное значение вибрации, и разность фаз между сигналом датчика возбуждения и сигналом датчика измерительного преобразователя соответствует второй разности φ2 фаз, тогда регистрируется соответствующая вторая частотная точка ω2. Вторая частотная точка ω1 вибрации содержит частоту вибрации, которая генерирует вторую целевую разность φ2 фаз. Вторая частотная точка ω2 содержит частоту, на которой разность фаз между фазой сигнала возбуждения и фазой сигнала измерительного преобразователя составляет около 45 градусов в некоторых вариантах осуществления.
Вновь определенная вторая частотная точка ω2 в некоторых вариантах осуществления может использоваться в качестве второй частотной точки ω2time=(t-1) предыдущего момента времени в будущей итерации (или итерациях) этапов 625-629 способа с разомкнутым циклом.
Вибрационный датчик 5 согласно любому из вариантов осуществления реагирует на более быстрые изменения в текучей среде, характеристики которой получают, используя работу по разомкнутому циклу.
Необходимо понимать, что этапы 601-608 способа с замкнутым циклом могут содержать начальный или запускающий процесс, в котором этапы 601-608 способа с замкнутым циклом выполняются по меньшей мере один раз. Этапы 601-608 способа с замкнутым циклом могут не выполняться во время нормальной работы или после начального или запускающего процесса. В некоторых вариантах осуществления этапы 620-629 способа с разомкнутым циклом могут итеративно выполняться, и этапы 601-608 способа с замкнутым циклом выполняются просто для извлечения начальных значений частотных точек ω1 и ω2. Альтернативно в некоторых вариантах осуществления этапы 601-608 способа с замкнутым циклом могут выполняться периодически или с перерывами, включая, например, по мере необходимости.
В альтернативном варианте осуществления первая и вторая частотные точки ω1 и ω2 могут находиться посредством измерения мощности вибрационного сигнала и определения первой и второй частотных точек ω1 и ω2 из точек половинной мощности вибрационного сигнала. Следует понимать, что частотные точки, найденные посредством измерения мощности, могут быть приблизительно такими же, что и частотные точки, найденные посредством контролирования разности фаз, но не могут быть точно одинаковыми.
Фиг.7 представляет собой график объединенных реакций на вибрационное воздействие по замкнутому циклу и разомкнутому циклу вибрационного датчика по фиг.4-5 и/или объединенных реакций на вибрационное воздействие по замкнутому циклу и разомкнутому циклу способа фиг.6. Вертикальная ось представляет частоту (ω) вибрации, и горизонтальная частота представляет время (t). Можно видеть, что вибрационный датчик известного уровня техники попеременно вибрирует с первой частотной точкой ω1 и затем со второй частотной точкой ω2, причем эта схема итеративно повторяется. Хотя частотные точки ω1 и ω2 показаны как постоянные, следует понимать, что первая и вторая частотные точки ω1 и ω2 могут меняться вследствие изменений в текучей среде, характеристики которой получают посредством, например, вибрационного датчика. Кроме того, первая и вторая частотные точки ω1 и ω2 могут меняться вследствие изменений окружающих условий, таких как, например, вследствие изменений температуры и/или давления.
Первые два появления вибрации охватывают два периода TCL времени замкнутого цикла. Первые два появления вибрации содержат вибрацию по замкнутому циклу, причем вибрация начинается на частотной точке ω1, и вибрация плавно и непрерывно изменяется до тех пор, пока вибрация не достигнет частотной точки ω2, или вибрация начинается на частотной точке ω2, и вибрация плавно и непрерывно изменяется до тех пор, пока вибрация не достигнет частотной точки ω1. Вследствие вибрации по замкнутому циклу в первых двух появлениях вибрации можно видеть, что фактическая частота вибрации изменяется плавно и непрерывно, но медленно. Каждое изменение частоты возбуждения требует периода TCL времени замкнутого цикла для завершения, вследствие обратной связи, используемой для достижения целевой разности фаз. В результате вибрационный камертонный датчик известного уровня техники не может измерять быстрые изменения частотных точек ω1 и ω2 и, поэтому, не может измерять быстрые изменения плотности и/или вязкости текучей среды, характеристики которой получают.
Последующие семь появлений вибрации, показанных на фигуре, охватывают периоды TOL времени разомкнутого цикла. Последующие семь появлений вибрации содержат вибрацию по разомкнутому циклу, причем вибрация начинается на заданной целевой вибрации, и вибрация прерывисто переходит с предыдущей вибрации на заданную целевую вибрацию. Например, в начале первого периода TOL времени разомкнутого цикла (точка A на графике), где частота вибрации в данный момент представляют собой вторую частотную точку ω2, вибрация, тем не менее, быстро и прерывисто переходит на первую частотную точку ω1 (точка B).
Как указано выше, вибрация исключительно по замкнутому циклу может использоваться для инициирования вибрации. Затем вибрация может переключиться на использование вибрации исключительно по разомкнутому циклу или может переключиться на использование объединенной вибрации по разомкнутому и замкнутому циклу, причем часть с разомкнутым циклом итерации значительно сокращает время итерации.
Кроме того или альтернативно измерительная электроника 20 может принимать решение, применять ли вибрацию по разомкнутому циклу, как, например, при каждой итерации, посредством проверки различных окружающих факторов. Например, измерительная электроника 20 может использовать вибрацию по разомкнутому циклу, если текучая среда, характеристики которой получают, является, по существу, стабильной. Измеряемая плотность текучей среды может определяться стабильной, если она не изменяется более заданного допуска на плотность в течение заданного периода времени.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых изобретателями, находящихся в пределах объема изобретения. Действительно, для специалиста в данной области техники понятно, что некоторые элементы вышеописанных вариантов осуществления могут различным образом объединяться или исключаться для создания дополнительных вариантов осуществления, и такие дополнительные варианты осуществления подпадают под объем и идеи изобретения. Для специалиста в данной области техники также очевидно, что вышеописанные варианты осуществления могут объединяться целиком или частями для создания дополнительных вариантов осуществления в пределах объема и идей изобретения. Следовательно, объем изобретения должен определяться из последующей формулы изобретения.
Изобретение относится к вибрационному датчику и способу измерения вибрации в вибрационном датчике. Вибрационный датчик (5) включает в себя вибрационный элемент (104), схему (134) приемника, которая принимает вибрационный сигнал от вибрационного элемента (104), и схему (138) возбуждения, которая генерирует сигнал возбуждения. Схема (138) возбуждения включает в себя возбуждение (143) по замкнутому циклу и возбуждение (147) по разомкнутому циклу. Измерительная электроника (20) побуждает вибрацию вибрационного элемента (104), начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности Φ1 фаз для текучей среды, характеристики которой получают, и определяет соответствующую первую частотную точку ω1, побуждает вибрацию вибрационного элемента (104), начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности Φ2 фаз, и определяет соответствующую вторую частотную точку ω2, и определяет вязкость текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2. Технический результат – обеспечение возможности измерения быстрого изменения вязкости текучей среды, характеристики которой получают. 2 н. и 16 з.п. ф-лы, 7 ил.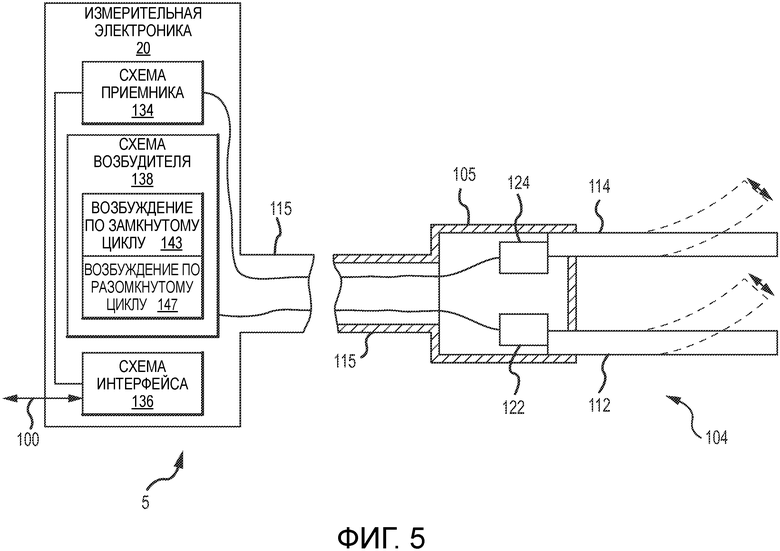
1. Вибрационный датчик (5), содержащий:
вибрационный элемент (104), выполненный с возможностью генерирования вибрационного сигнала; и
схему (134) приемника, которая принимает вибрационный сигнал от вибрационного элемента (104); и
схему (138) возбуждения, соединенную со схемой (134) приемника и вибрационным элементом (104) и генерирующую сигнал возбуждения, который побуждает вибрацию вибрационного элемента (104), причем схема (138) возбуждения побуждает вибрацию вибрационного элемента (104), начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определяет соответствующую первую частотную точку ω1, побуждает вибрацию вибрационного элемента (104), начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности φ2 фаз, и определяет соответствующую вторую частотную точку ω2, и определяет вязкость текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
2. Вибрационный датчик (5) по п.1, в котором вибрационный датчик (5) многократно выполняет этапы вибрирования и определения.
3. Вибрационный датчик (5) по п.1, в котором заданная первая частота содержит первую частотную точку ω1time=(t-1) предыдущего момента времени, и заданная вторая частота содержит вторую частотную точку ω2time=(t-1) предыдущего момента времени.
4. Вибрационный датчик (5) по п.1, в котором схема (138) возбуждения содержит возбуждение (143) по замкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз и начинается с текущей частоты вибрации, и возбуждение (147) по разомкнутому циклу, которое генерирует сигнал возбуждения для достижения целевой разности фаз и начинается с заданной первой или второй частоты.
5. Вибрационный датчик (5) по п.1, в котором побуждение вибрации вибрационного элемента (104) вибрационного датчика по разомкнутому циклу содержит:
установку схемой (138) возбуждения заданного значения вибрации на первую целевую разность φ1 фаз;
побуждение вибрации вибрационного элемента (104) схемой (138) возбуждения по разомкнутому циклу и с заданной первой частотой;
сравнение схемой (138) возбуждения текущей первой разности фаз с первой целевой разностью φ1 фаз и ожидание до тех пор, пока текущая первая разность фаз не станет, по существу, равной первой целевой разности φ1 фаз;
если текущая первая разность фаз равна первой целевой разности φ1 фаз, тогда регистрацию схемой (138) возбуждения соответствующей первой частотной точки ω1, причем достижение первой целевой разности φ1 фаз генерирует первую частотную точку ω1 в вибрационном элементе (104);
установку схемой (138) возбуждения заданного значения вибрации на вторую целевую разность φ2 фаз;
побуждение вибрации вибрационного элемента (104) схемой (138) возбуждения по разомкнутому циклу и с заданной второй частотой;
сравнение схемой (138) возбуждения текущей второй разности фаз со второй целевой разностью φ2 фаз и ожидание до тех пор, пока текущая вторая разность фаз не станет, по существу, равной второй целевой разности φ2 фаз; и,
если текущая вторая разность фаз равна второй целевой разности φ2 фаз, тогда регистрацию схемой (138) возбуждения соответствующей второй частотной точки ω2, причем достижение второй целевой разности φ2 фаз генерирует вторую частотную точку ω2 в вибрационном элементе (104).
6. Вибрационный датчик (5) по п.1, в котором схема (138) возбуждения дополнительно выполнена с возможностью:
побуждения вибрации вибрационного элемента (104) по замкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и
определения соответствующей первой частотной точки ω1, причем вибрация начинается на текущей частоте вибрации; и
побуждения вибрации вибрационного элемента (104) по замкнутому циклу для достижения второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, и определения соответствующей второй частотной точки ω2, причем вибрация начинается на текущей частоте вибрации.
7. Вибрационный датчик (5) по п.1, в котором схема (138) возбуждения выбирает работу по разомкнутому циклу, если текучая среда, характеристики которой получают, является, по существу, стабильной.
8. Вибрационный датчик (5) по п.1, в котором схема (138) возбуждения дополнительно выполнена с возможностью:
побуждения вибрации вибрационного элемента (104), начиная с заданной первой частоты и по разомкнутому циклу для приближения к первой целевой разности φ1 фаз для текучей среды, характеристики которой получают;
побуждения вибрации вибрационного элемента (104) по замкнутому циклу для достижения первой целевой разности φ1 фаз и определения соответствующей первой частотной точки ω1;
побуждения вибрации вибрационного элемента (104), начиная с заданной второй частоты и по разомкнутому циклу для приближения ко второй целевой разности φ2 фаз для текучей среды, характеристики которой получают;
побуждения вибрации вибрационного элемента (104) по замкнутому циклу для достижения второй целевой разности φ2 фаз и определения соответствующей второй частотной точки ω2; и
определения вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
9. Вибрационный датчик (5) по п.1, в котором схема (134) приемника соединена со схемой (138) возбуждения, причем схема (134) приемника предоставляет амплитуду вибрационного сигнала и частоту вибрационного сигнала на схему (138) возбуждения, причем схема (138) возбуждения генерирует сигнал возбуждения для вибрационного элемента (104), используя амплитуду вибрационного сигнала и частоту вибрационного сигнала.
10. Вибрационный датчик (5) по п.1, причем вибрационный датчик (5) содержит вибрационный камертонный датчик (5), и вибрационный элемент (104) содержит конструкцию (104) камертонного типа.
11. Способ изменения вибрации в вибрационном датчике, причем способ содержит этапы, на которых:
побуждают вибрацию вибрационного элемента вибрационного датчика, начиная с заданной первой частоты и по разомкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определяют соответствующую первую частотную точку ω1;
побуждают вибрацию вибрационного элемента, начиная с заданной второй частоты и по разомкнутому циклу для достижения второй целевой разности φ2 фаз, и определяют соответствующую вторую частотную точку ω2; и
определяют вязкость текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
12. Способ по п.11, многократно выполняющий этапы вибрации и определения.
13. Способ по п.11, в котором заданная первая частота содержит первую частотную точку ω1time=(t-1) предыдущего момента времени, и заданная вторая частота содержит вторую частотную точку ω2time=(t-1) предыдущего момента времени.
14. Способ по п.11, в котором побуждение вибрации вибрационного элемента по разомкнутому циклу содержит:
установку заданного значения вибрации на первую целевую разность φ1 фаз;
побуждение вибрации вибрационного элемента по разомкнутому циклу и с заданной первой частотой;
сравнение текущей первой разности фаз с первой целевой разностью φ1 фаз и ожидание до тех пор, пока текущая первая разность фаз не станет, по существу, равной первой целевой разности φ1 фаз;
если текущая первая разность фаз равна первой целевой разности φ1 фаз, тогда регистрацию соответствующей первой частотной точки ω1, причем достижение первой целевой разности φ1 фаз генерирует первую частотную точку ω1 в вибрационном элементе;
установку заданного значения вибрации на вторую целевую разность φ2 фаз;
побуждение вибрации вибрационного элемента по разомкнутому циклу и с заданной второй частотой;
сравнение текущей второй разности фаз со второй целевой разностью φ2 фаз и ожидание до тех пор, пока текущая вторая разность фаз не станет, по существу, равной второй целевой разности φ2 фаз; и,
если текущая вторая разность фаз равна второй целевой разности φ2 фаз, тогда регистрацию соответствующей второй частотной точки ω2, причем достижение второй целевой разности φ2 фаз генерирует вторую частотную точку ω2 в вибрационном элементе.
15. Способ по п.11, дополнительно содержащий предварительные этапы:
побуждения вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз для текучей среды, характеристики которой получают, и определения соответствующей первой частотной точки ω1, причем вибрация начинается с текущей частотой вибрации; и
побуждения вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз для текучей среды, характеристики которой получают, и определения соответствующей второй частотной точки ω2, причем вибрация начинается с текущей частотой вибрации.
16. Способ по п.11, причем в способе выбирается работа по разомкнутому циклу, если текучая среда, характеристики которой получают, является, по существу, стабильной.
17. Способ по п.11, в котором этапы побуждения вибрации содержат:
побуждение вибрации вибрационного элемента, начиная с заданной первой частотой и по разомкнутому циклу для приближения к первой целевой разности φ1 фаз для текучей среды, характеристики которой получают;
побуждение вибрации вибрационного элемента по замкнутому циклу для достижения первой целевой разности φ1 фаз и определение соответствующей первой частотной точки ω1;
побуждение вибрации вибрационного элемента, начиная с заданной второй частоты и по разомкнутому циклу для приближения ко второй целевой разности φ2 фаз для текучей среды, характеристики которой получают;
побуждение вибрации вибрационного элемента по замкнутому циклу для достижения второй целевой разности φ2 фаз и определение соответствующей второй частотной точки ω2; и
определение вязкости текучей среды, характеристики которой получают, используя первую частотную точку ω1 и вторую частотную точку ω2.
18. Способ по п.11, в котором вибрационный датчик содержит вибрационный камертонный датчик, и вибрационный элемент содержит конструкцию камертонного типа.
| US 8297112 B2, 30.10.2012 | |||
| US 8322194 B2, 04.12.2012 | |||
| US 2010161251 A1, 24.06.2010. |

