Область техники, к которой относится изобретение
Варианты осуществления, описанные ниже, относятся к датчикам вибрации и, более конкретно, к способам формирования сигнала возбуждения для датчика вибрации.
Уровень техники
Датчики вибрации, такие как вибрационные денситометры и вибрационные вискозиметры, работают посредством обнаружения движения вибрирующего элемента, который вибрирует в присутствии текучей среды, которая должна быть охарактеризована. Свойства, ассоциированные с текучей средой, такие как плотность, вязкость, температура и т.п., могут быть определены посредством обработки сигнала или сигналов вибрации, принятых от одного или более измерительных преобразователей движения, ассоциированных с вибрирующим элементом. На вибрацию вибрирующего элемента, как правило, оказывает влияние общая масса, жесткость и характеристики затухания вибрирующего элемента в комбинации с текучей средой.
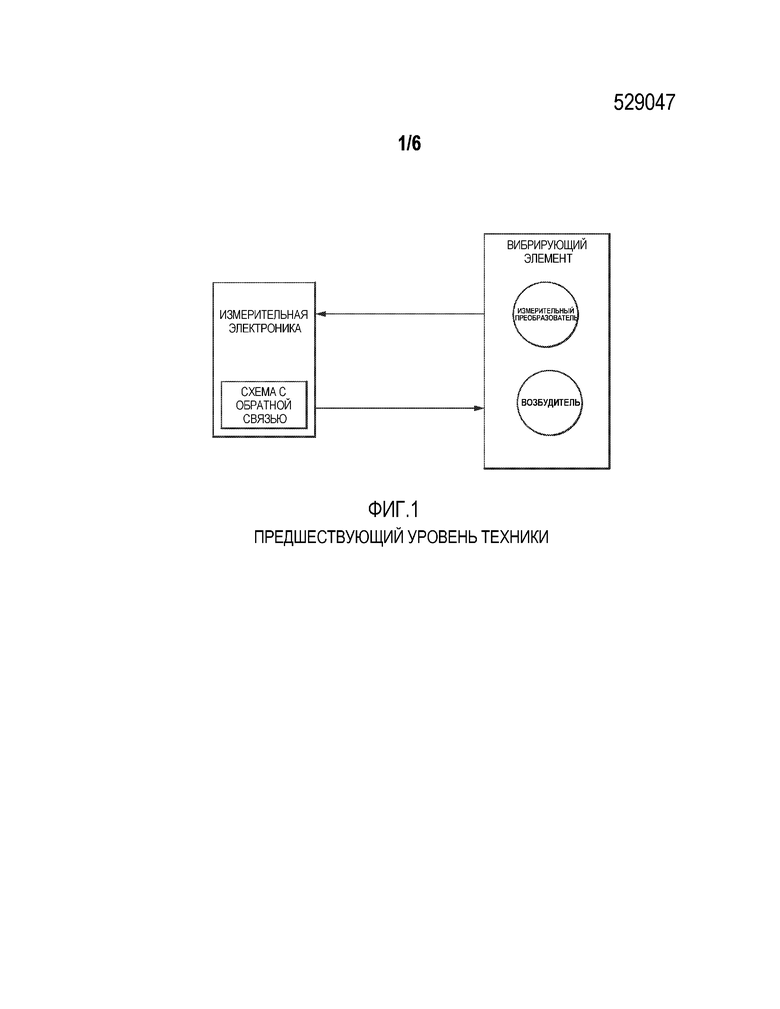
Фиг.1 показывает датчик вибрации предшествующего уровня техники, содержащий вибрирующий элемент и измерительную электронику, соединенную с вибрирующим элементом. Датчик вибрации предшествующего уровня техники включает в себя возбудитель для вибрации вибрирующего элемента и измерительный преобразователь, который формирует сигнал вибрации в ответ на вибрацию. Сигнал вибрации является непрерывным по времени или аналоговым сигналом. Измерительная электроника принимает сигнал вибрации и обрабатывает сигнал вибрации, чтобы формировать одну или более характеристик текучей среды или показателей текучей среды. Измерительная электроника определяет как частоту, так и амплитуду сигнала вибрации. Частота и амплитуда сигнала вибрации могут быть дополнительно обработаны, чтобы определять плотность текучей среды.
Датчик вибрации предшествующего уровня техники предоставляет сигнал возбуждения для возбудителя с помощью системы управления с обратной связью. Сигнал возбуждения обычно основывается на принятом сигнале вибрации. Система управления с обратной связью предшествующего уровня техники модифицирует или объединяет сигнал вибрации или параметры сигнала вибрации в сигнал возбуждения. Например, сигнал возбуждения может быть усиленной, модулированной или иначе модифицированной версией принятого сигнала вибрации. Принятый сигнал вибрации может, поэтому, содержать обратную связь, которая предоставляет возможность системе управления с обратной связью достигать целевой частоты. С помощью обратной связи система управления с обратной связью с приращением изменяет частоту возбуждения и наблюдает за сигналом вибрации до тех пор, пока целевая частота не будет достигнута.
Целевая частота текучей среды может быть коррелирована с желаемым углом сдвига фаз между сигналом возбуждения и сигналом вибрации. Свойства текучей среды, такие как вязкость и плотность текучей среды, могут быть определены из частот, где угол сдвига фаз между сигналом возбуждения и сигналом вибрации равен 135° и 45°. Эти желаемые углы сдвига фаз, обозначенные как первый угол ϕ1 сдвига фаз и второй угол ϕ2 сдвига фаз, могут соответствовать половинной мощности или частотам 3 дБ. Первая целевая частота ω1 определяется как частота, где первый угол ϕ1 сдвига фаз равен 135°. Вторая целевая частота ω2 определяется как частота, где второй угол ϕ2 сдвига фаз равен 45°. Измерения плотности, выполненные со второй целевой частотой ω2, могут не зависеть от вязкости текучей среды. Соответственно, измерения плотности, выполненные, когда второй угол ϕ2 сдвига фаз равен 45°, могут быть более точными, чем измерения плотности, выполненные при других углах сдвига фаз.
Подход с обратной связью обычно измеряет частоту сигнала вибрации, чтобы определять, на какую величину сдвинуть частоту сигнала возбуждения, чтобы достигать второго угла ϕ2 сдвига фаз. С помощью измеренной частоты соотношение между измеренной частотой и фазой используется, чтобы определять, существует ли угол сдвига фаз, равный 45°, между сигналом возбуждения и сигналом вибрации. Однако подход с обратной связью к измерению свойств текучей среды имеет некоторые ассоциированные проблемы. Например, частота сигнала вибрации должна сначала быть измерена, чтобы получать желаемый угол сдвига фаз между сигналом вибрации и сигналом возбуждения. Это может быть проблематичным, поскольку сигнал вибрации может быть очень небольшим относительно шума. В результате измерение частоты из сигнала вибрации требует фильтрации. Эта фильтрация может вызывать задержки в измерении частоты, что может вызывать неустойчивость в алгоритмах управления возбуждением. Дополнительно, любой нефильтрованный шум в сигнале вибрации будет воспроизведен в сигнале возбуждения. Шум в сигнале возбуждения может вызывать неустойчивость возбуждения, а также неточности в измерении частоты.
Соответственно, существует необходимость в способе для формирования сигнала возбуждения для датчика вибрации, который не требует измерений частоты, ассоциированных с подходом с обратной связью.
Сущность изобретения
Предложен способ формирования сигнала возбуждения для датчика вибрации. Согласно варианту осуществления способ содержит возбуждение вибрации вибрирующего элемента, сконфигурированного, чтобы предоставлять сигнал вибрации, прием сигнала вибрации от вибрирующего элемента с помощью схемы приемника. Способ дополнительно содержит формирование сигнала возбуждения, который выполняет вибрацию вибрирующего элемента с помощью схемы возбудителя, соединенной со схемой приемника и вибрирующим элементом, и сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации.
Предложен датчик вибрации. Согласно варианту осуществления датчик вибрации содержит вибрирующий элемент, сконфигурированный, чтобы предоставлять сигнал вибрации, схему приемника, которая принимает сигнал вибрации от вибрирующего элемента, и схему возбудителя, соединенную со схемой приемника и вибрирующим элементом. Схема возбудителя конфигурируется, чтобы формировать сигнал возбуждения, который выполняет вибрацию вибрирующего элемента, и сравнивать фазу сформированного сигнала возбуждения с фазой сигнала вибрации.
Аспекты
Согласно аспекту, способ (600) формирования сигнала возбуждения для датчика (5) вибрации содержит возбуждение вибрации вибрирующего элемента (104, 510), сконфигурированного, чтобы предоставлять сигнал вибрации, прием сигнала вибрации от вибрирующего элемента (104, 510) с помощью схемы (134) приемника, формирование сигнала возбуждения, который выполняет вибрацию вибрирующего элемента (104, 510), с помощью схемы (138) возбудителя, соединенной со схемой (134) приемника и вибрирующим элементом (104, 510), и сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации.
Предпочтительно, сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации содержит сравнение дискретизированного сформированного сигнала возбуждения с дискретизированным сигналом вибрации.
Предпочтительно, способ (600) дополнительно содержит удаление по меньшей мере одной частотной составляющей по меньшей мере из одного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, сравнение дискретизированного сформированного сигнала возбуждения с дискретизированным сигналом вибрации содержит выполнение корреляции дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, сравнение дискретизированного сформированного сигнала возбуждения с дискретизированным сигналом вибрации содержит конъюгированиеодного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации и перемножение конъюгированного одного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации с не конъюгированного одним из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации содержит определение измеренного угла ϕm сдвига фаз между фазой сформированного сигнала возбуждения и фазой сигнала вибрации и сравнение измеренного угла ϕm сдвига фаз с целевым углом ϕt сдвига фаз, чтобы определять, равен ли измеренный угол ϕm сдвига фаз целевому углу ϕt сдвига фаз.
Предпочтительно, способ (600) дополнительно содержит измерение плотности текучей среды, когда измеренный угол ϕm сдвига фаз равен целевому углу ϕt сдвига фаз.
Предпочтительно, способ (600) дополнительно содержит определение командной частоты ω из сравнения фазы сформированного сигнала возбуждения и фазы сигнала вибрации, предоставление командной частоты ω возбудителю (147с) сигнала и формирование сигнала возбуждения с командной частотой ω с помощью возбудителя (147c) сигнала.
Предпочтительно, способ (600), в котором формирование сигнала возбуждения с командной частотой ω с помощью возбудителя (147c) сигнала, содержит формирование синтезированного сигнала возбуждения с помощью синтезатора (544) возбуждения и преобразование синтезированного сигнала возбуждения в сформированный сигнал возбуждения с помощью цифроаналогового преобразователя (534).
Согласно аспекту, датчик (5) вибрации содержит вибрирующий элемент (104, 510), сконфигурированный, чтобы предоставлять сигнал вибрации, схему (134) приемника, которая принимает сигнал вибрации от вибрирующего элемента (104), и схему (138) возбудителя, соединенную со схемой (134) приемника и вибрирующим элементом (104), схема (138) возбудителя сконфигурирована, чтобы формировать сигнал возбуждения, который выполняет вибрацию вибрирующего элемента (104, 510), и сравнивает фазу сформированного сигнала возбуждения с фазой сигнала вибрации.
Предпочтительно, схема (138) возбудителя конфигурируется, чтобы сравнивать дискретизированный сформированный сигнал возбуждения с дискретизированным сигналом вибрации.
Предпочтительно, схема (138) возбудителя дополнительно конфигурируется, чтобы удалять по меньшей мере одну частотную составляющую по меньшей мере из одного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, схема (138) возбудителя дополнительно конфигурируется, чтобы выполнять корреляцию дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, схема (138) возбудителя дополнительно конфигурируется, чтобы конъюгировать один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации, и перемножает конъюгированный один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации с неконъюгированным одним из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
Предпочтительно, схема (138) возбудителя состоит из фазового детектора (147b, 542), сконфигурированного, чтобы определять измеренный угол ϕm сдвига фаз между фазой сформированного сигнала возбуждения и фазой сигнала вибрации и сравнивать измеренный угол ϕm сдвига фаз с целевым углом ϕt сдвига фаз, чтобы определять, равен ли измеренный угол ϕm сдвига фаз целевому углу ϕt сдвига фаз.
Предпочтительно, схема (138) возбудителя дополнительно конфигурируется, чтобы измерять плотность текучей среды, когда измеренный угол ϕm сдвига фаз равен целевому углу ϕt сдвига фаз.
Предпочтительно, схема (138) возбудителя состоит из фазового детектора (147b, 542) и возбудителя (147c) сигнала, при этом фазовый детектор (147b) конфигурируется, чтобы определять командную частоту ω из сравнения фазы сформированного сигнала возбуждения и фазы сигнала вибрации, и предоставляет командную частоту ω возбудителю (147c) сигнала; и возбудитель (147c) сигнала сконфигурирован, чтобы формировать сигнал возбуждения с командной частотой ω.
Предпочтительно, возбудитель (147c) сигнала содержит синтезатор (544) возбуждения, сконфигурированный, чтобы формировать синтезированный сигнал возбуждения, и цифроаналоговый преобразователь (534), сконфигурированный, чтобы преобразовывать синтезированный сигнал возбуждения в сформированный сигнал возбуждения.
Краткое описание чертежей
Один и тот же ссылочный номер представляет один и тот же элемент на всех чертежах. Должно быть понятно, что чертежи необязательно начерчены в масштабе.
Фиг.1 показывает датчик вибрации предшествующего уровня техники, содержащий вибрирующий элемент и измерительную электронику, соединенную с вибрирующим элементом.
Фиг.2 показывает датчик 5 вибрации согласно варианту осуществления.
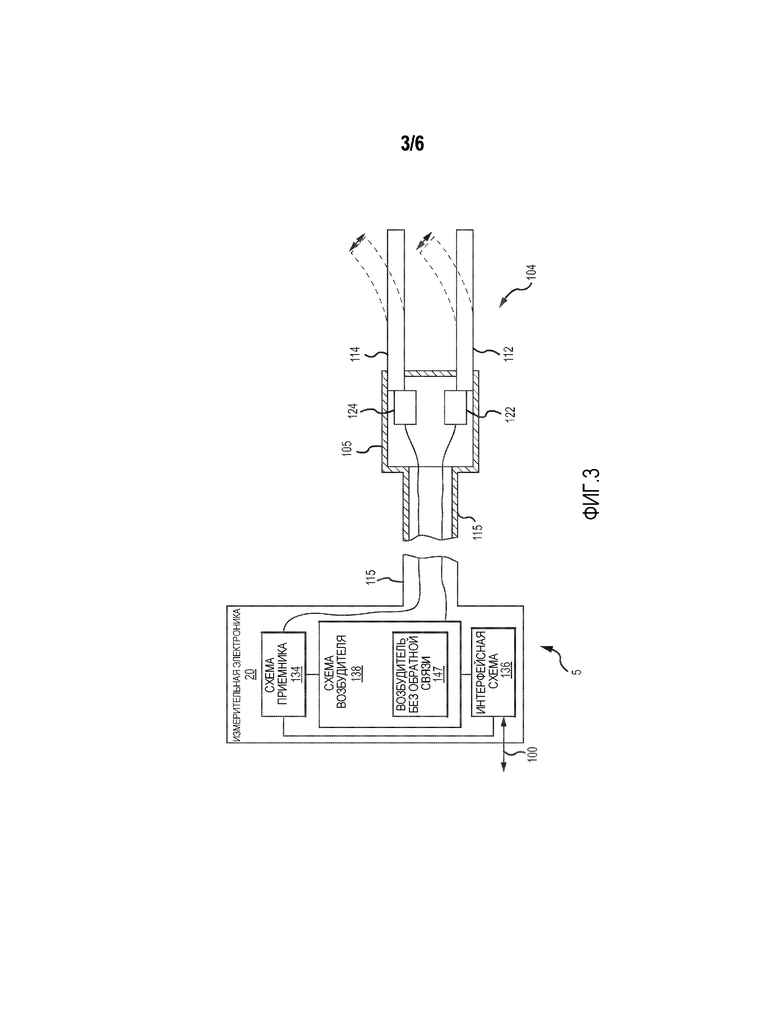
Фиг.3 показывает датчик 5 вибрации согласно варианту осуществления.
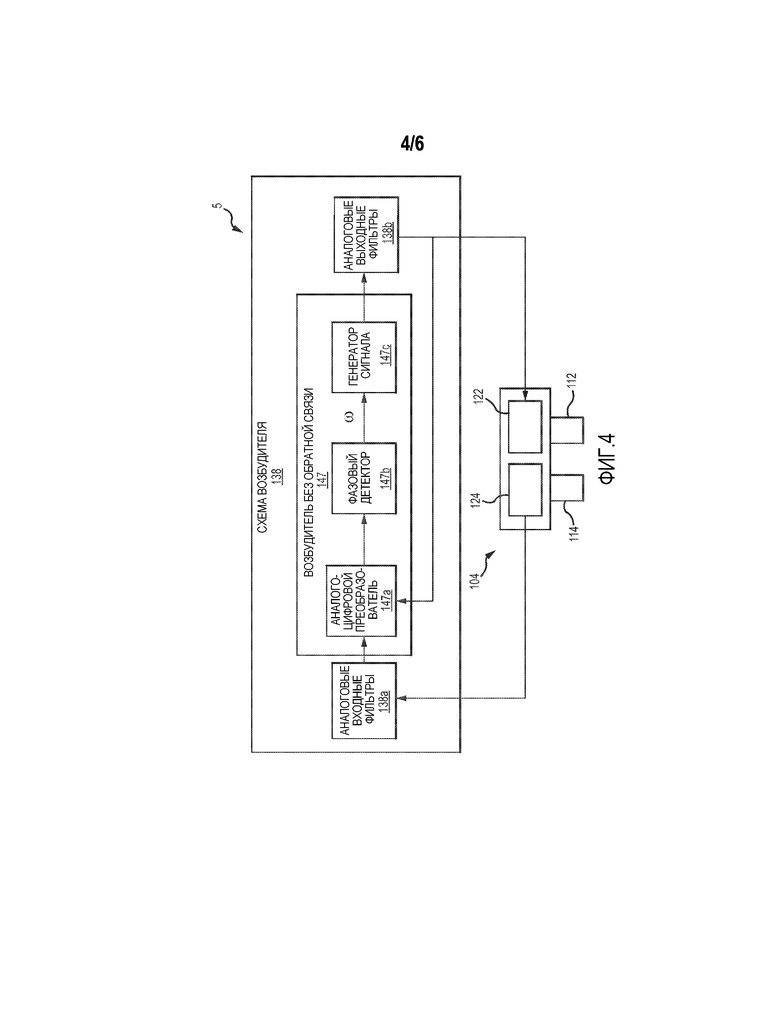
Фиг.4 показывает блок-схему датчика 5 вибрации с более подробным представлением схемы 138 возбудителя.
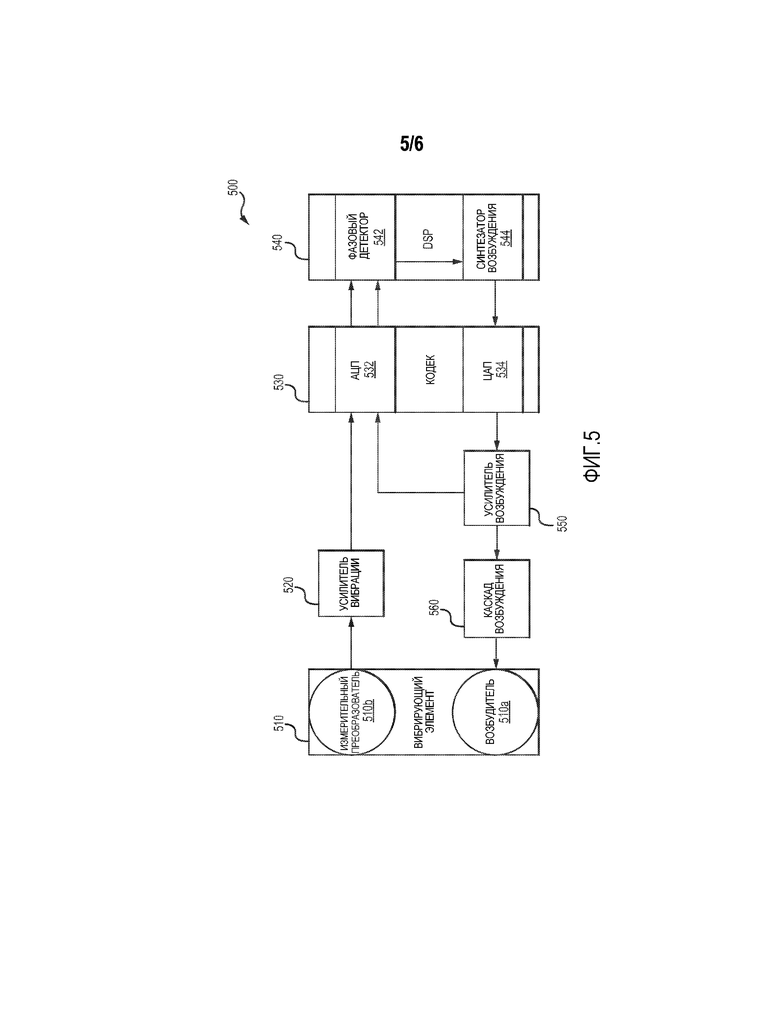
Фиг.5 показывает блок-схему 500 датчика 5 вибрации согласно варианту осуществления.
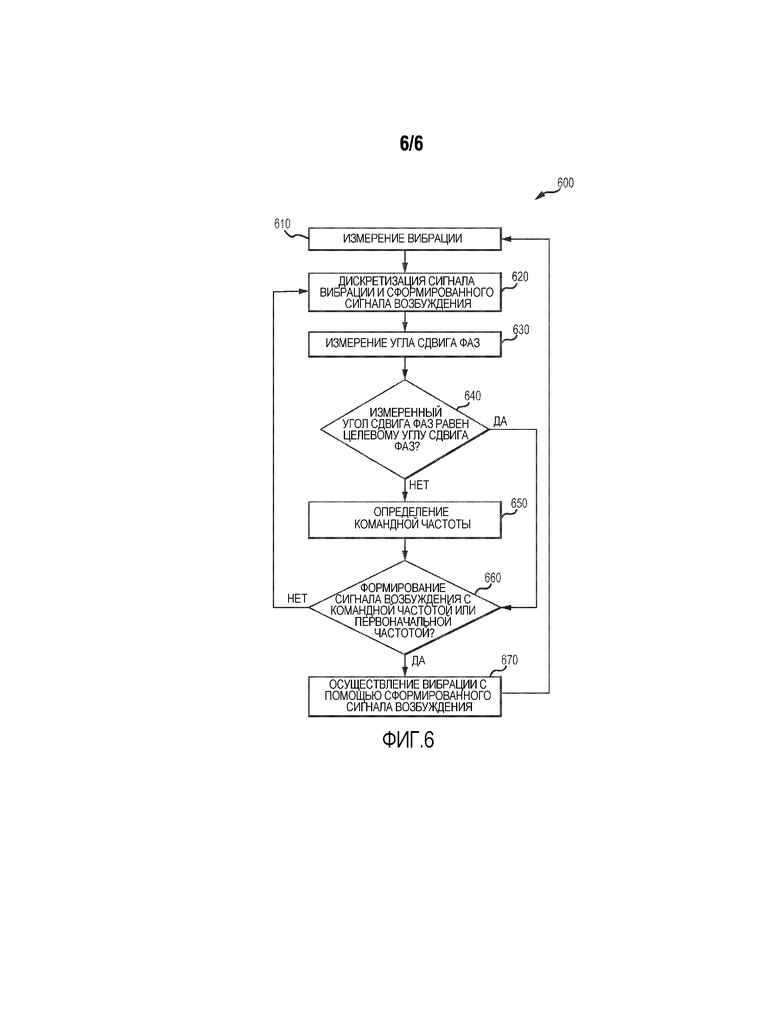
Фиг.6 показывает способ 600 формирования сигнала возбуждения согласно варианту осуществления.
Подробное описание изобретения
Фиг.2-6 и последующее описание изображают конкретные примеры, чтобы обучить специалистов в области техники тому, как создавать и использовать оптимальный режим вариантов осуществления способа для формирования сигнала возбуждения для датчика вибрации. В целях обучения принципам изобретения некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники поймут вариации из этих примеров, которые попадают в рамки настоящего описания. Специалисты в области техники поймут, что признаки, описанные ниже, могут быть объединены различными способами, чтобы формировать множество вариаций способа для формирования сигнала возбуждения для датчика вибрации. В результате варианты осуществления, описанные ниже, не ограничиваются конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
Фиг.2 показывает датчик 5 вибрации согласно варианту осуществления. Датчик 5 вибрации может содержать вибрирующий элемент 104 и измерительную электронику 20, при этом вибрирующий элемент 104 соединяется с измерительной электроникой 20 проводом или проводами 100. В некоторых вариантах осуществления датчик 5 вибрации может содержать зубцеобразный датчик вибрации или вилкообразный датчик плотности (см. фиг.3 и сопровождающее обсуждение). Однако другие датчики вибрации рассматриваются и находятся в рамках описания и формулы изобретения.
Датчик 5 вибрации может быть по меньшей мере частично погружен в текучую среду, которая должна быть охарактеризована. Текучая среда может содержать жидкость или газ. Альтернативно, текучая среда может содержать многофазную текучую среду, такую как жидкость, которая включает в себя увлеченный потоком газ, механические примеси, множество жидкостей или их комбинации. Некоторые примерные текучие среды включают в себя цементный раствор, нефтепродукты или т.п. Датчик 5 вибрации может быть установлен в трубе или трубопроводе, баке, контейнере или других сосудах для текучих сред. Датчик 5 вибрации может также быть установлен в коллекторе или аналогичной структуре для направления потока текучей среды. Однако другие конфигурации установки рассматриваются и находятся в рамках описания и формулы изобретения.
Датчик 5 вибрации работает, чтобы предоставлять показатели текучей среды. Датчик 5 вибрации может предоставлять показатели текучей среды, включающие в себя одно или более из плотности текучей среды и вязкости текучей среды для текучей среды, включающей в себя проточные и непроточные текучие среды. Датчик 5 вибрации может предоставлять показатели текучей среды, включающие в себя массовый расход текучей среды, объемный расход текучей среды и/или температуру текучей среды. Это перечисление не является исчерпывающим, и датчик 5 вибрации может измерять или определять другие характеристики текучей среды.
Измерительная электроника 20 может предоставлять электрическую энергию датчику 104 вибраций через провод или провода 100. Измерительная электроника 20 управляет работой вибрирующего элемента 104 через провод или провода 100. Например, измерительная электроника 20 может формировать сигнал возбуждения и предоставлять сформированный сигнал возбуждения вибрирующему элементу 104, при этом вибрирующий элемент 104 формирует вибрацию в одном или более вибрирующих компонентах с помощью сформированного сигнала возбуждения. Сформированный сигнал возбуждения может управлять амплитудой и частотой вибрации вибрирующего элемента 104. Сформированный сигнал возбуждения может также управлять продолжительностью вибрации и/или моментом вибрации.
Измерительная электроника 20 может также принимать сигнал или сигналы вибрации от вибрирующего элемента 104 через провод или провода 100. Измерительная электроника 20 может обрабатывать сигнал или сигналы вибрации, чтобы формировать показатель плотности, например. Измерительная электроника 20 обрабатывает сигнал или сигналы вибрации, принятые от вибрирующего элемента 104, чтобы определять частоту сигнала или сигналов. Дополнительно, или в дополнение, измерительная электроника 20 обрабатывает сигнал или сигналы вибрации, чтобы определять другие характеристики текучей среды, такие как вязкость или сдвиг фаз между сигналами, которые могут быть обработаны, чтобы определять расход текучей среды, например. Другие характеристики вибрационной реакции и/или показатели текучей среды рассматриваются и находятся в рамках описания и формулы изобретения.
Измерительная электроника 20 может быть дополнительно соединена с линией 26 связи. Измерительная электроника 20 может передавать сигнал вибрации по линии 26 связи. Измерительная электроника 20 может также обрабатывать принятый сигнал вибрации, чтобы формировать измеренное значение или значения, и может передавать измеренное значение или значения по линии 26 связи. Кроме того, измерительная электроника 20 может принимать информацию по линии 26 связи. Например, измерительная электроника 20 может принимать команды, обновления, операционные значения или изменения операционных значений и/или программные обновления или изменения по линии 26 связи.
Фиг.3 показывает датчик 5 вибрации согласно варианту осуществления. Измерительная электроника 20 соединяется с вибрирующим элементом 104 посредством ствола 115 в показанном варианте осуществления. Ствол 115 может быть любой желательной длины. Ствол 115 может быть по меньшей мере частично полым. Провода или другие проводники могут протягиваться между измерительной электроникой 20 и вибрирующим элементом 104 через ствол 115. Измерительная электроника 20 включает в себя компоненты схемы, такие как схема 134 приемника, интерфейсная схема 136 и схема 138 возбудителя. В показанном варианте осуществления схема 134 приемника и схема 138 возбудителя непосредственно соединяются с проводами вибрирующего элемента 104. Альтернативно, измерительная электроника 20 может содержать компонент или устройство, отдельное от вибрирующего компонента 104, при этом схема 134 приемника и схема 138 возбудителя соединяются с вибрирующим элементом 104 через провод или провода 100.
В показанном варианте осуществления вибрирующий элемент 104 датчика 5 вибрации содержит камертонную структуру, при этом вибрирующий элемент 104 по меньшей мере частично погружается в измеряемую текучую среду. Вибрирующий элемент 104 включает в себя корпус 105, который может быть прикреплен к другой структуре, такой как труба, трубопровод, бак, резервуар, коллектор или любая другая обращающаяся с текучей средой структура. Корпус 105 удерживает вибрирующий элемент 104, в то время как вибрирующий элемент 104 остается по меньшей мере частично раскрытым. Вибрирующий элемент 104, поэтому, конфигурируется, чтобы быть погруженным в текучую среду.
Вибрирующий элемент 104 в показанном варианте осуществления включает в себя первый и второй зубцы 112 и 114, которые конфигурируются, чтобы протягиваться по меньшей мере частично в текучую среду. Первый и второй зубцы 112 и 114 содержат вытянутые элементы, которые могут иметь любую желаемую форму поперечного сечения. Первый и второй зубцы 112 и 114 могут быть по меньшей мере частично гибкими или упругими по природе. Датчик 5 вибрации дополнительно включает в себя соответствующие первый и второй пьезоэлементы 122 и 124, которые содержат пьезоэлектрические кристаллические элементы. Первый и второй пьезоэлементы 122 и 124 располагаются рядом с первым и вторым зубцами 112 и 114, соответственно. Первый и второй пьезоэлементы 122 и 124 конфигурируются, чтобы контактировать и механически взаимодействовать с первым и вторым зубцами 112 и 114.
Первый пьезоэлемент 122 находится в контакте по меньшей мере с фрагментом первого зубца 112. Первый пьезоэлемент 122 также электрически соединяется со схемой 138 возбудителя. Схема 138 возбудителя предоставляет сформированный сигнал возбуждения первому пьезоэлементу 122. Первый пьезоэлемент 122 растягивается и сжимается, когда подвергается сформированному сигналу возбуждения. В результате первый пьезоэлемент 122 может попеременно деформировать и смещать первый зубец 122 из стороны в сторону в вибрирующем движении (см. прерывистые линии), возмущающем текучую среду периодическим, возвратно-поступательным образом.
Второй пьезоэлемент 124 показан как соединенный со схемой 134 приемника, который формирует сигнал вибрации, соответствующий деформациям второго зубца 114 в текучей среде. Перемещение второго зубца 114 вынуждает формироваться соответствующий электрический сигнал вибрации посредством второго пьезоэлемента 124. Второй пьезоэлемент 124 передает сигнал вибрации измерительной электронике 20. Измерительная электроника 20 включает в себя интерфейсную схему 136. Интерфейсная схема 136 может быть сконфигурирована, чтобы связываться с внешними устройствами. Интерфейсная схема 136 передает сигнал измерения вибрации или сигналы и может передавать определенные характеристики текучей среды одному или более внешним устройствам. Измерительная электроника 20 может передавать характеристики сигнала вибрации через интерфейсную схему 136, такие как частота сигнала вибрации и амплитуда сигнала вибарции для сигнала вибрации. Измерительная электроника 20 может передавать показатели текучей среды через интерфейсную схему 136, такие как плотность и/или вязкость текучей среды, среди прочего. Другие показатели текучей среды рассматриваются и находятся в рамках описания и формулы изобретения. Кроме того, интерфейсная схема 136 может принимать сообщения от внешних устройств, включающие в себя команды и данные для формирования значений измерений, например. В некоторых вариантах осуществления схема 134 приемника соединяется со схемой 138 возбудителя, при этом схема 134 приемника предоставляет сигнал вибрации схеме 138 возбудителя.
Схема возбудителя 138 формирует сигнал возбуждения для вибрирующего элемента 104. Схема 138 возбудителя может модифицировать характеристики сформированного сигнала возбуждения. Вибрирующий элемент 104, как правило, поддерживается на резонансной частоте, на которую влияет окружающая текучая среда. Схема 138 возбудителя включает в себя возбудитель 147 без обратной связи. Возбудитель 147 без обратной связи может быть использован схемой 138 возбудителя, чтобы формировать сигнал возбуждения и подавать сформированный сигнал возбуждения вибрирующему элементу 104 (например, первому пьезоэлементу 122). В некоторых вариантах осуществления возбудитель 147 без обратной связи формирует сигнал возбуждения, чтобы добиваться целевого угла ϕt сдвига фаз, начиная с первоначальной частоты ω0. Возбудитель 147 без обратной связи не работает на основе обратной связи из сигнала вибрации. Возбудитель 147 без обратной связи может, поэтому, предоставлять сформированный сигнал возбуждения, свободный от шума, и без временной задержки вследствие фильтрации сигнала вибрации, как будет описано более подробно в последующем.
Фиг.4 показывает блок-схему датчика 5 вибрации с более подробным представлением схемы 138 возбудителя. Датчик 5 вибрации показан со схемой 138 возбудителя. Схема 134 приемника и интерфейсная схема 136 не показаны для ясности. Схема 138 возбудителя включает в себя аналоговый входной фильтр 138a и аналоговый выходной фильтр 138b, которые соединяются с возбудителем 147 без обратной связи. Аналоговый входной фильтр 138a фильтрует сигнал вибрации, а аналоговый выходной фильтр 138b фильтрует сформированный сигнал возбуждения.
Возбудитель 147 без обратной связи включает в себя аналого-цифровой преобразователь 147a, который соединяется с фазовым детектором 147b. Фазовый детектор 147b соединяется с генератором 147c сигнала. Также показан вибрирующий элемент 104, который включает в себя первый пьезоэлемент 122 и второй пьезоэлемент 124. Возбудитель 147 без обратной связи может быть реализован с помощью цифрового сигнального процессора, который конфигурируется, чтобы выполнять один или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы. Дополнительно или альтернативно, возбудитель 147 без обратной связи может быть реализован с помощью электронной схемы, соединенной с цифровым сигнальным процессором или т.п.
Сигнал вибрации, предоставленный посредством первого пьезоэлемента 122, отправляется аналоговым входным фильтрам 138a. Аналоговые входные фильтры 138a фильтруют сигнал вибрации, прежде чем сигнал вибрации дискретизируется посредством аналого-цифрового преобразования 147a. В показанном варианте осуществления аналоговые входные фильтры 138a могут состоять из низкочастотного фильтра с частотой среза, которая равна примерно половине частоты дискретизации возбудителя 147 без обратной связи, хотя любой подходящий низкочастотный фильтр может быть использован. Низкочастотный фильтр может быть предоставлен посредством пассивных компонентов, таких как дроссель, конденсатор и резистор, хотя любые подходящие компоненты, распределенные или дискретные, такие как фильтр операционного усилителя, могут быть использованы.
Аналого-цифровой преобразователь 147a может дискретизировать фильтрованный сигнал вибрации, чтобы формировать дискретизированный сигнал вибрации. Аналого-цифровой преобразователь 147a может также дискретизировать сформированный сигнал возбуждения через второй канал. Дискретизация может быть посредством любого соответствующего способа дискретизации. Как может быть понятно, сформированный сигнал возбуждения, дискретизированный посредством аналого-цифрового преобразователя 147a, не имеет шума, ассоциированного с сигналом вибрации. Сформированный сигнал возбуждения предоставляется фазовому детектору 147b.
Фазовый детектор 147b может сравнивать фазы дискретизированной вибрации и сформированного сигнала возбуждения. Фазовый детектор 147b может быть процессором, сконфигурированным, чтобы выполнять один или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы, чтобы обнаруживать угол сдвига фаз между двумя сигналами, как будет описано более подробно в последующем со ссылкой на фиг.5. Все еще обращаясь к варианту осуществления на фиг.4, сравнение предоставляет измеренный угол ϕm сдвига фаз между дискретизированным сигналом вибрации и дискретизированным сформированным сигналом возбуждения.
Измеренный угол ϕm сдвига фаз сравнивается с целевым углом ϕt сдвига фаз. Целевой угол ϕt сдвига фаз является желаемым углом сдвига фаз между сигналом вибрации и сформированным сигналом возбуждения. В варианте осуществления, когда целевой угол ϕt сдвига фаз приблизительно равен 45°, разница между измеренным углом ϕm сдвига фаз и целевым углом ϕt сдвига фаз может быть нулевой, если измеренный угол ϕm сдвига фаз также является таким же или приблизительно равен 45°. Однако любой соответствующий целевой угол ϕt сдвига фаз может быть использован в альтернативных вариантах осуществления. С помощью сравнения между измеренным углом ϕm сдвига фаз и целевым углом ϕt сдвига фаз фазовый детектор 147b может формировать командную частоту ω.
Командная частота ω может быть использована, чтобы формировать сигнал возбуждения. Дополнительно или альтернативно первоначальная частота ω0, которая не определяется из сравнения между измеренным углом ϕm сдвига фаз и целевым углом ϕt сдвига фаз, может быть использована. Первоначальная частота ω0 может быть предварительно выбранной частотой, используемой, чтобы формировать первоначальный сформированный сигнал возбуждения. Первоначальный сформированный сигнал возбуждения может быть дискретизирован, как описано выше, и сравнен с дискретизированным сигналом вибрации. Сравнение между дискретизированным первоначальным сформированным сигналом возбуждения и дискретизированным сигналом вибрации может быть использовано, чтобы формировать командную частоту ω. Командная частота ω и первоначальная частота ω0 могут иметь единицы радиан в секунду, хотя любые подходящие единицы могут быть использованы. Командная частота ω или первоначальная частота ω0 может быть предоставлена генератору 147c сигнала.
Генератор 147c сигнала может принимать командную частоту ω от фазового детектора 147b и предоставлять сформированный сигнал возбуждения с частотой, которая является такой же, что и командная частота ω. Сформированный сигнал возбуждения отправляется, как обсуждено выше, аналого-цифровому преобразователю 147a. Сформированный сигнал возбуждения также отправляется второму пьезоэлементу 124 через аналоговый выходной фильтр 138b. Дополнительно или альтернативно, сформированный сигнал возбуждения может быть отправлен другим компонентам в других вариантах осуществления. В этих и других вариантах осуществления сформированный сигнал возбуждения может, поэтому, быть определен из различия между измеренным углом ϕm сдвига фаз и целевым углом ϕt сдвига фаз, как будет описано более подробно в последующем.
Фиг.5 показывает блок-схему 500 датчика 5 вибрации согласно варианту осуществления. Блок-схема 500 включает в себя вибрирующий элемент 510. Вибрирующий элемент 510 включает в себя возбудитель 510a и измерительный преобразователь 510b. Блок-схема 500 также включает в себя усилитель 520 вибрации, который соединяется с измерительным преобразователем 510b. Усилитель 520 вибрации соединяется с аналого-цифровым преобразователем 532, который находится в блоке 530 кодека. Аналого-цифровой преобразователь 532 соединяется с фазовым детектором 542 в блоке 540 цифрового сигнального процессора (DSP). DSP-блок 540 также включает в себя синтезатор 544 возбуждения, который принимает сигнал от фазового детектора 542. Синтезатор 544 возбуждения соединяется с цифро-аналоговым преобразователем 534, который соединяется с усилителем 550 возбуждения. Усилитель 550 возбуждения соединяется с каскадом 560 возбуждения и аналого-цифровым преобразователем 532. Усилитель 550 возбуждения может усиливать сформированный сигнал возбуждения, предоставленный блоком 530 кодека.
Блок 530 кодека показан как двухсторонний преобразователь, хотя могут быть использованы любые подходящие конфигурации. Как показано, аналого-цифровой преобразователь 532 в блоке 530 кодека принимает сигнал вибрации от усилителя 520 вибрации. В альтернативных вариантах осуществления сигнал вибрации может быть предоставлен аналого-цифровому преобразователю 532 непосредственно от измерительного преобразователя 510b. Аналого-цифровой преобразователь 532 дискретизирует сигнал вибрации, который может быть непрерывным по времени сигналом, с частотой и разрешением дискретизации, чтобы формировать дискретизированный сигнал вибрации. Аналого-цифровой преобразователь 532 может включать в себя фильтр подавления помех, который устраняет нежелательные частотные составляющие из сигнала вибрации перед дискретизацией.
Аналого-цифровой преобразователь 532 также дискретизирует сформированный сигнал возбуждения, предоставленный усилителем 550 возбуждения. Сформированный сигнал возбуждения от усилителя 550 возбуждения может быть непрерывным по времени сигналом, хотя любой подходящий сигнал может быть предоставлен. Аналогично сигналу вибрации, аналого-цифровой преобразователь 532 может дискретизировать сформированный сигнал возбуждения с соответствующей частотой и разрешением дискретизации. Аналого-цифровой преобразователь 532 может также включать в себя фильтр подавления помех, который устраняет какие-либо нежелательные частотные составляющие из сформированного сигнала возбуждения перед дискретизацией. Дискретизированный сигнал вибрации и дискретизированный сформированный сигнал возбуждения предоставляются фазовому детектору 542 в DSP-блоке 540. Фазовый детектор 542 сравнивает дискретизированный сигнал вибрации с дискретизированным сформированным сигналом возбуждения, чтобы определять измеренный угол ϕm сдвига фаз, как будет описано в последующем.
В показанном варианте осуществления фазовый детектор 542 может определять измеренный угол ϕm сдвига фаз между дискретизированным сигналом вибрации и дискретизированным сформированным сигналом возбуждения посредством корреляции дискретизированных сигналов. Например, один или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы, могут реализовывать преобразование, вместе с прореживанием и другими DSP-функциями, чтобы определять измеренный угол ϕm сдвига фаз. Эти и другие варианты осуществления могут быть иллюстрированы следующими уравнениями.
Сформированный сигнал возбуждения и сигнал вибрации могут быть представлены в комплексной плоскости следующими уравнениями [1] и [2].
 [1]
[1]
 [2]
[2]
Функция zgds(k) является комплексным представлением сформированного сигнала возбуждения, а функция zvs(k) является комплексным представлением сигнала вибрации. Выражение  включает в себя k - целое кратное частоты ω и представляет частотные составляющие. Прореживание или другая фильтрация может быть использована, чтобы устранять частотные составляющие. Соответственно, комплексные представления, без частотных составляющих, могут быть записаны как уравнения [3] и [4].
включает в себя k - целое кратное частоты ω и представляет частотные составляющие. Прореживание или другая фильтрация может быть использована, чтобы устранять частотные составляющие. Соответственно, комплексные представления, без частотных составляющих, могут быть записаны как уравнения [3] и [4].
 [3]
[3]
 [4]
[4]
Выполнение комплексного сопряжения и корреляции (например, мультипликации) по вышеупомянутым уравнениям [3] и [4] дает в результате уравнение [5], описанное ниже.
 [5]
[5]
Может быть принято во внимание, что одна из функций не конъюгируется(например, неконъюгированная). Из уравнения [5] измеренный угол ϕm сдвига фаз между сформированным сигналом возбуждения и сигналом вибрации может быть
 [6]
[6]
Вышеизложенное иллюстрирует примерный вариант осуществления, показывающий, как измеренный угол ϕm сдвига фаз может быть определен. Как может быть понятно, различные варианты осуществления фазового детектора 542 могут определять измеренный угол ϕm сдвига фаз между дискретизированным сигналом вибрации и дискретизированным сигналом возбуждения. Измеренный угол ϕm сдвига фаз может быть использован, чтобы определять командную частоту ω, как будет объяснено более подробно в последующем со ссылкой на фиг.6. Все еще обращаясь к фиг.5, командная частота ω предоставляется синтезатору 544 возбуждения.
Синтезатор 544 возбуждения может быть процессором, который выполняет один или более кодов или программ, который принимает командную частоту ω и предоставляет синтезированный сигнал возбуждения. Синтезированный сигнал возбуждения может быть дискретным представлением простого синусоидального сигнала. Например, синтезированный сигнал возбуждения может быть цепочкой импульсов с огибающей, которая соответствует простому синусоидальному сигналу. Дополнительно или альтернативно, синтезатор 544 возбуждения может быть цифровой схемой, программируемой пользователем вентильной матрицей (FPGA) или т.п. Например, цифровая схема может принимать сигнал напряжения постоянного тока (DC) с величиной, которая соответствует командной частоте ω. В альтернативном варианте осуществления синтезатор возбуждения может принимать сигнал напряжения (например, постоянный ток и т.д.) и предоставлять сформированный сигнал возбуждения с командной частотой ω, пропорциональной сигналу напряжения.
В показанном варианте осуществления синтезатор 544 возбуждения предоставляет синтезированный сигнал возбуждения цифро-аналоговому преобразователю 534. цифроаналоговый преобразователь 534 преобразует синтезированный сигнал возбуждения в сформированный сигнал возбуждения. цифроаналоговый преобразователь 534 может быть фиксатором нулевого порядка, который преобразует, например, цепочку импульсов в ступенчатую синусоидальную форму волны, хотя любой подходящий цифроаналоговый преобразователь 534 может быть использован. В альтернативных вариантах осуществления, таких как варианты осуществления, когда синтезатор 544 возбуждения является цифровой схемой или FPGA, описанной в вышеизложенном, цифроаналоговый преобразователь 534 может быть не нужен. В таких вариантах осуществления сформированный сигнал возбуждения может быть предоставлен без цифроаналогового преобразования. В этих и других вариантах осуществления сформированный сигнал возбуждения может быть простым синусоидальным сигналом с или около командной частоты ω. В альтернативных вариантах осуществления сформированный сигнал возбуждения может состоять из более чем одной частотной составляющей. В показанном варианте осуществления сформированный сигнал возбуждения отправляется усилителю 550 возбуждения.
Усилитель 550 возбуждения усиливает сформированный сигнал возбуждения и предоставляет усиленный сформированный сигнал возбуждения аналого-цифровому преобразователю 532 и каскаду 560 возбуждения. Усилитель 550 возбуждения и каскад 560 возбуждения могут модифицировать сформированный сигнал возбуждения, чтобы добиваться желаемой формы волны. Например, усилитель 550 возбуждения может усиливать сформированный сигнал возбуждения, чтобы превышать мощность, доступную возбудителю 510a. Соответственно, в вариантах осуществления, где сформированный сигнал возбуждения является непрерывным по времени синусоидальным сигналом, сформированный сигнал возбуждения, предоставленный возбудителю 510a, может иметь трапецеидальную форму. Дополнительно или альтернативно, сформированный сигнал возбуждения может иметь другие формы, такие как треугольная форма волны, цепочка различных форм волны или т.п. Эти и другие формы волн могут быть сформированы с помощью командной частоты ω, определенной из измеренного угла ϕm сдвига фаз, как будет объяснено более подробно в последующем.
Фиг.6 показывает способ 600 формирования сигнала возбуждения согласно варианту осуществления. Способ 600 начинается с этапа 610. На этапе 610 вибрация измеряется посредством второго зубца 114. Второй зубец 114 вибрирует вследствие вибраций в текучей среде. Вибрации могут присутствовать в текучей среде вследствие того, что первый зубец 112 вибрирует с командной частотой ω или первоначальной частотой ω0. Втрой пьезоэлемент 124 отправляет сигнал вибрации аналоговым входным фильтрам 138a. Аналоговые входные фильтры 138a фильтруют сигнал вибрации, чтобы устранять шум и ограничивать полосу частот сигнала вибрации. Фильтрованный сигнал вибрации отправляется аналого-цифровому преобразователю 147a, 532. Сформированный сигнал возбуждения от генератора 147c сигнала также отправляется аналого-цифровому преобразователю 147a, 532.
На этапе 620 сигнал вибрации и сгенерированный сигнал возбуждения дискретизируются посредством аналого-цифрового преобразователя 147a, 532. Дискретизация может быть любым соответствующим способом дискретизации, который преобразует сигнал вибрации и сгенерированный сигнал возбуждения в последовательность чисел, которая может быть, например, в бинарном формате. Дискретизация может быть выполнена с любой соответствующей частотой дискретизации и битовым разрешением.
На этапе 630 измеренный угол ϕm сдвига фаз между фазой дискретизированного сигнала вибрации и фазой дискретизированного сформированного сигнала возбуждения определяется посредством фазового детектора 147b. Хотя измеренный угол ϕm сдвига фаз является углом с единицами градусов, другие единицы, такие как радианы, могут быть использованы в других вариантах осуществления. Альтернативно, разность времени может быть использована вместо разности фаз.
На этапе 640 измеренный угол ϕm сдвига фаз сравнивается с целевым углом ϕt сдвига фаз. В вариантах осуществления, описанных выше, целевой угол ϕt сдвига фаз равен 45°. Если сравнение указывает, что измеренный угол ϕm сдвига фаз является таким же, что и целевой угол ϕt сдвига фаз, тогда способ 600 продолжает формировать сигнал возбуждения с той же командной частотой ω или первоначальной частотой ω0 на этапе 660. Если измеренный угол ϕm сдвига фаз не является таким же, что и целевой угол ϕt сдвига фаз, тогда командная частота ω определяется на этапе 650.
На этапе 650 командная частота ω может быть определена из измеренного угла ϕm сдвига фаз. Например, в вариантах осуществления, описанных выше, если измеренный угол ϕm сдвига фаз меньше целевого угла ϕt сдвига фаз, тогда командная частота ω увеличивается. Если измеренный угол ϕm сдвига фаз больше целевого угла ϕt сдвига фаз, тогда командная частота уменьшается. Однако в альтернативных вариантах осуществления, командная частота ω может быть определена из измеренного угла ϕm сдвига фаз с помощью альтернативного средства. В этих и других вариантах осуществления командная частота ω используется, чтобы формировать сигнал возбуждения на этапе 660.
На этапе 660 генератор 147c сигнала формирует сформированный сигнал возбуждения с командной частотой ω. В варианте осуществления генератор 147c сигнала состоит из синтезатора 544 возбуждения и цифроаналогового преобразователя 534. Альтернативно, генератора 147c сигнала может состоять из цифровой схемы, FPGA или т.п. В варианте осуществления, описанном со ссылкой на фиг.5, сформированный сигнал возбуждения формируется из синтезированного сигнала возбуждения, предоставленного посредством синтезатора 544 возбуждения. В этих и других вариантах осуществления сформированный сигнал возбуждения может быть синусоидальным сигналом возбуждения с единой частотой, хотя любой другой подходящий сигнал или сигналы могут быть предоставлены.
Сформированный сигнал возбуждения используется, чтобы осуществлять вибрацию вибрирующего элемента 104, 510. Как показано на фиг.5, сформированный сигнал возбуждения предоставляется усилителю 550 возбуждения и каскаду 560 возбуждения. Усилитель 550 возбуждения и каскад 560 возбуждения модифицируют и предоставляют сформированный сигнал возбуждения возбудителю 510a. Однако сформированный сигнал возбуждения может быть предоставлен вибрирующему элементу 104, 510 через другое средство. Например, сформированный сигнал возбуждения может быть предоставлен непосредственно возбудителю 510a. Сформированный сигнал возбуждения может также быть дискретизирован и измерен. Например, как показано на фиг.6, этап 660 также возвращает сформированный сигнал возбуждения на этап 620, где сформированный сигнал возбуждения дискретизируется.
В работе фазовый детектор 147b может отправлять командную частоту ω генератору 147c сигнала. В некоторых вариантах осуществления схема 138 возбудителя выполняет вибрацию вибрирующего элемента 104 (например, первого зубца 112, возбудителя 510a и т.д.) с командной частотой ω и способом без обратной связи, чтобы добиваться целевого угла ϕt сдвига фаз. Целевой угол ϕt сдвига фаз может быть равен 45°, чтобы точно измерять плотность текучей среды. Однако в альтернативных вариантах осуществления, целевой угол ϕt сдвига фаз может быть другим значением.
Способ 600 и датчик 5 вибраций могут предоставлять сформированный сигнал возбуждения. Например, сформированный сигнал возбуждения может быть предоставлен посредством генератора 147c сигнала с командной частотой ω. В варианте осуществления генератор 147c сигнала может состоять из синтезатора 544 возбуждения и цифроаналогового преобразователя 534. Командная частота ω может быть определена из измеренного угла ϕm сдвига фаз между сигналом вибрации и сформированным сигналом возбуждения. Измеренный угол ϕm сдвига фаз может быть определен с помощью фазового детектора 147b, 542.
Как может быть понятно, частота сигнала вибрации не измеряется или сравнивается с частотой сформированного сигнала возбуждения. Вместо этого фаза сигнала вибрации и сформированного сигнала возбуждения может быть определена с помощью одного или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы. Например, согласно варианту осуществления, описанному выше, дискретизированный сигнал вибрации и дискретизированный сигнал возбуждения сопрягаются и коррелируются, без частотных составляющих, чтобы определять измеренный угол ϕm сдвига фаз. Соответственно, измеренный угол ϕm сдвига фаз между сигналом вибрации и сформированным сигналом возбуждения может быть определен без задержек, ассоциированных с измерителями вибрации предшествующего уровня техники. Кроме того, генератор 147c сигнала может предоставлять сформированный сигнал возбуждения, свободный от шума, ассоциированного с сигналом вибрации. Например, как описано в вышеизложенных вариантах осуществления, фазовый детектор 542 устраняет частотные составляющие дискретизированного сигнала вибрации и сформированного сигнала возбуждения перед определением измеренного угла ϕm сдвига фаз.
Соответственно, сформированный сигнал возбуждения не включает в себя шум от сигнала вибрации или временную задержку, ассоциированную с предшествующим уровнем техники. Поскольку сформированный сигнал возбуждения свободен от шума, ассоциированного с сигналом вибрации, измерение плотности является более точным. Кроме того, поскольку не существует временной задержки, ассоциированной с фильтрацией предшествующего уровня техники, сформированный сигнал возбуждения является более устойчивым. Эти и другие преимущества могут быть получены с помощью способа 600 и датчика 5 вибрации, а также альтернативных вариантов осуществления.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых изобретателями как находящиеся в рамках настоящего описания. В действительности, специалисты в области техники поймут, что определенные элементы вышеописанных вариантов осуществления могут по-разному быть объединены или устранены, чтобы создавать дополнительные варианты осуществления, и такие дополнительные варианты осуществления попадают в рамки и учения настоящего описания. Также обычным специалистам в данной области техники будет очевидно, что вышеописанные варианты осуществления могут быть объединены в целом или частично, чтобы создавать дополнительные варианты осуществления в рамках и учениях настоящего описания.
Таким образом, хотя конкретные варианты осуществления описываются в данном документе в иллюстративных целях, различные эквивалентные модификации возможны в рамках настоящего описания, как поймут специалисты в связанной области техники. Учения, предоставленные в данном документе, могут быть применены к другим способам для формирования сигнала возбуждения для датчика вибрации, а не только к вариантам осуществления, описанным выше и показанным на сопровождающих чертежах. Соответственно, рамки вариантов осуществления, описанных выше, должны быть определены из последующей формулы изобретения.
Изобретение относится к измерительной технике, в частности к устройствам для измерения вибрации. Устройство содержит схему приемника, интерфейсную схему, схему возбуждения, в состав которой входят возбудитель без обратной связи, входные аналоговые фильтры, аналого-цифровой преобразователь, фазовый детектор, генератор сигнала возбуждения, выходные аналоговые фильтры, вибрирующий элемент, содержащий пьезоэлектрические кристаллические элементы. Первый и второй пьезоэлементы располагаются рядом с первым и вторым зубцами. Также в состав устройства входят усилитель измерительного сигнала вибрации, усилитель возбуждения, цифроаналоговый преобразователь, синтезатор сигнала возбуждения, цифровой сигнальный процессор, кодек. Способ измерения предполагает измерение вибрации, дискретизацию сигнала вибрации, измерение угла сдвига фаз, сравнение измеренного угла сдвига фаз с целевым углом сдвига фаз, определение командной частоты, формирование сигнала возбуждения с командной частотой, если измеренный угол сдвига фаз равен целевому углу сдвига фаз. Создание механической вибрации с помощью полученного сигнала возбуждения. Технический результат – уменьшение нестабильности в алгоритме управления возбуждением. 2 н. и 16 з.п. ф-лы, 6 ил.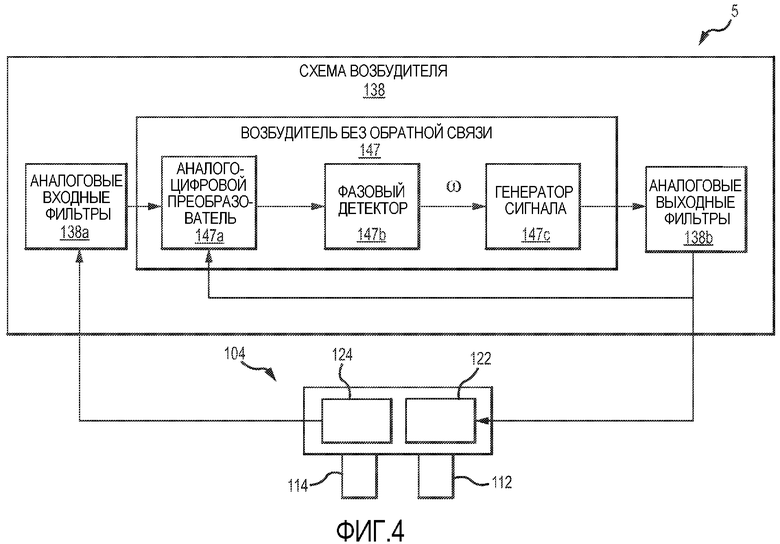
1. Способ (600) формирования сигнала возбуждения для датчика (5) вибрации, причем способ содержит этапы, на которых:
обеспечивают вибрацию вибрирующего элемента (104, 510), сконфигурированного, чтобы предоставлять сигнал вибрации;
принимают сигнал вибрации от вибрирующего элемента (104, 510) с помощью схемы (134) приемника;
формируют сигнал возбуждения, который обеспечивает вибрацию вибрирующего элемента (104, 510) с помощью схемы (138) возбудителя, соединенной со схемой (134) приемника и вибрирующим элементом (104, 510); и
сравнивают фазу сформированного сигнала возбуждения с фазой сигнала вибрации,
определяют командную частоту ω из сравнения фазы сформированного сигнала возбуждения и фазы сигнала вибрации;
причем сигнал возбуждения формируют на командной частоте ω с помощью возбудителя (147) без обратной связи в схеме возбудителя (138).
2. Способ (600) по п.1, при этом сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации содержит этап, на котором сравнивают дискретизированный сформированный сигнал возбуждения с дискретизированным сигналом вибрации.
3. Способ (600) по п.2, дополнительно содержащий этап, на котором удаляют по меньшей мере одну частотную составляющую по меньшей мере из одного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
4. Способ (600) по п.2, при этом сравнение дискретизированного сформированного сигнала возбуждения с дискретизированным сигналом вибрации содержит этап, на котором выполняют корреляцию дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
5. Способ (600) по п.2, при этом сравнение дискретизированного сформированного сигнала возбуждения с дискретизированным сигналом вибрации содержит этапы, на которых:
конъюгируют один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации; и
перемножают конъюгированный один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации с неконъюгированным одним из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
6. Способ (600) по п.1, при этом сравнение фазы сформированного сигнала возбуждения с фазой сигнала вибрации содержит этапы, на которых:
определяют измеренный угол ϕm сдвига фаз между фазой сформированного сигнала возбуждения и фазой сигнала вибрации; и
сравнивают измеренный угол ϕm сдвига фаз с целевым углом ϕt сдвига фаз, чтобы определять, равен ли измеренный угол ϕm сдвига фаз целевому углу ϕt сдвига фаз.
7. Способ (600) по п.6, дополнительно содержащий этап, на котором измеряют плотность текучей среды, когда измеренный угол 
8. Способ (600) по п.1, дополнительно содержащий этапы, на которых:
предоставляют командную частоту ω генератору (147c) сигнала; и
формируют сигнал возбуждения с командной частотой ω с помощью генератора (147c) сигнала.
9. Способ (600) по п.8, при этом формирование сигнала возбуждения с командной частотой ω с помощью генератора (147c) сигнала содержит этапы, на которых:
формируют синтезированный сигнал возбуждения с помощью синтезатора (544) возбуждения; и
преобразуют синтезированный сигнал возбуждения в сформированный сигнал возбуждения с помощью цифро-аналогового преобразователя (534).
10. Датчик (5) вибрации, содержащий:
вибрирующий элемент (104, 510), сконфигурированный, чтобы предоставлять сигнал вибрации;
схему (134) приемника, которая принимает сигнал вибрации от вибрирующего элемента (104); и
схему (138) возбудителя, соединенную со схемой (134) приемника и вибрирующим элементом (104), схема (138) возбудителя сконфигурирована, чтобы:
формировать сигнал возбуждения, который выполняет вибрацию вибрирующего элемента (104, 510); и
сравнивать фазу сформированного сигнала возбуждения с фазой сигнала вибрации,
определять командную частоту ω из сравнения фазы сформированного сигнала возбуждения и фазы сигнала вибрации,
причем сигнал возбуждения сформирован на командной частоте ω с помощью возбудителя без обратной связи в схеме возбудителя.
11. Датчик (5) вибрации по п.10, в котором схема (138) возбудителя конфигурируется, чтобы сравнивать дискретизированный сформированный сигнал возбуждения с дискретизированным сигналом вибрации.
12. Датчик (5) вибрации по п.11, в котором схема (138) возбудителя дополнительно конфигурируется, чтобы устранять по меньшей мере один частотный компонент по меньшей мере из одного из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
13. Датчик (5) вибрации по п.11, в котором схема (138) возбудителя дополнительно конфигурируется, чтобы выполнять корреляцию дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
14. Датчик (5) вибрации по п.11, в котором схема (138) возбудителя дополнительно конфигурируется, чтобы:
конъюгировать один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации; и
перемножать конъюгированный один из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации с неконъюгированным одним из дискретизированного сформированного сигнала возбуждения и дискретизированного сигнала вибрации.
15. Датчик (5) вибрации по п.10, в котором схема (138) возбудителя состоит из фазового детектора (147b, 542), сконфигурированного, чтобы:
определять измеренный угол ϕm сдвига фаз между фазой сформированного сигнала возбуждения и фазой сигнала вибрации; и
сравнивать измеренный угол ϕm сдвига фаз с целевым углом ϕt сдвига фаз, чтобы определять, равен ли измеренный угол ϕm сдвига фаз целевому углу ϕt сдвига фаз.
16. Датчик (5) вибрации по п.15, при этом схема (138) возбудителя дополнительно конфигурируется, чтобы измерять плотность текучей среды, когда измеренный угол ϕm сдвига фаз равен целевому углу ϕt сдвига фаз.
17. Датчик (5) вибрации по п.10, в котором схема (138) возбудителя состоит из:
фазового детектора (147b, 542) и генератора (147c) сигнала, при этом:
фазовый детектор (147b) конфигурируется, чтобы определять командную частоту ω из сравнения фазы сформированного сигнала возбуждения и фазы сигнала вибрации, и предоставляет командную частоту ω генератору (147c) сигнала; и
генератор (147c) сигнала сконфигурирован, чтобы формировать сигнал возбуждения с командной частотой ω.
18. Датчик (5) вибрации по п.17, в котором генератор (147c) сигнала содержит:
синтезатор (544) возбуждения, сконфигурированный, чтобы формировать синтезированный сигнал возбуждения; и
цифроаналоговый преобразователь (534), сконфигурированный, чтобы преобразовывать синтезированный сигнал возбуждения в сформированный сигнал возбуждения.
| US 5895848 A1, 20.04.1999 | |||
| US 2008184813 A1, 07.08.2008 | |||
| US 4965532 A, 23.10.1990 | |||
| US 4738144 A, 19.04.1988 | |||
| WO 2013009307 A1, 17.01.2013 | |||
| US 20100161251 A1, 24.06.2010 | |||
| CN 102506951 A, 20.06.2012 | |||
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И КОРИОЛИСОВ РАСХОДОМЕР | 2009 |
|
RU2460974C2 |
| US 4841256 A1, 20.06.1989 | |||
| US 20040173031 A1, 09.09.2004 | |||
| US 4801897 A1, 31.01.1989. | |||

