Изобретение относится к области ультразвукового неразрушающего контроля и может быть использовано для дефектоскопии протяженных изделий эхометодом при волноводном распространении ультразвука в них. К таким изделиям относятся, в частности, трубы, прутки, штанги, рельсы, уголки, листовой и тавровый прокат и т.п.
Известна эквидистантная антенная решетка (АР), содержащая установленные в ряд в корпусе пьезопреобразователи, представленная в статье А.К. Гурвич, А.А. Самокрутов, В.Г. Шевалдыкин «Применение ультразвукового дефектоскопа АКР 1224 для контроля рельсов волноводным методом», XVII Российская научно-техническая конференция «Неразрушающий контроль и диагностика», Екатеринбург, 2005 г. (копия приложена).
Эта линейная АР плохо приспособлена для контроля изделий с неплоскими поверхностями, такими как трубы или прутки, особенно небольших диаметров, поскольку опирается на поверхность по линии расположения ультразвуковых преобразователей, что вызывает неустойчивость ее положения. Кроме того, она содержит только жестко запрограммированный электронный коммутатор и общий приемный тракт с аналоговым выходом, что не позволяет ее использовать для контроля изделий с двоякой протяженностью, например, листы или трубы больших диаметров, когда требуется совместная пространственно-временная обработка сигналов ото всех преобразователей антенной решетки в общем устройстве обработки и отображения информации по алгоритму синтезированной апертуры.
Наиболее близким аналогом изобретения является ультразвуковая антенная решетка в виде двухмерной матрицы, содержащая установленные в корпусе ультразвуковые преобразователи, подключенный к ним коммутатор, импульсный генератор, связанный с ним измерительный блок и блок управления, подключенный к управляющим входам коммутатора и измерительного блока, связанного информационным входом с выходом коммутатора, а выход импульсного генератора подключен к входу возбуждения коммутатора, при этом каждый из ультразвуковых преобразователей выполнен с протектором, обеспечивающим точечный или линейный контакт с контролируемым изделием и с прижимным механизмом с возможностью возвратно-поступательного перемещения ультразвукового преобразователя перпендикулярно рабочей поверхности антенной решетки - RU 2080592 С1, 1997 г.
Известная эквидистантная АР обладает всеми недостатками указанного предыдущего аналога.
В соответствии с этими недостатками техническая задача, решаемая изобретением, состоит в создании устройства с возможностью контроля изделий как с малыми поперечными размерами: труб, прутков малого диаметра или таврового профиля, так и изделий с двоякой протяженностью, при этом предлагаемая АР должна использоваться с внешним устройством обработки и отображения информации в виде компьютера или специализированного электронного блока с экраном.
Эта задача решена в ультразвуковой антенной решетке, содержащей установленные в корпусе ультразвуковые преобразователи с сухим точечным контактом на рабочей поверхности решетки, индивидуальным прижимным механизмом с возможностью возвратно-поступательного перемещения перпендикулярно рабочей поверхности решетки и схемой управления, преобразователи расположены в плане вдоль зигзагообразной линии с точками контакта в ее вершинах, векторы колебательных смещений всех ультразвуковых преобразователей ориентированы поперек или вдоль продольной оси антенной решетки, на рабочей поверхности решетки дополнительно размещены постоянные магниты, схема управления выполнена в виде генератора импульсов и усилителя - для каждого преобразователя и общего блока управления, устройства обработки сигналов и блока связи, при этом выход каждого генератора импульсов подключен к входу соответствующего преобразователя и входу соответствующего усилителя, выход которого подключен к соответствующему информационному входу устройства обработки сигналов, вход генератора импульсов соединен с соответствующим выходом блока управления, синхронизирующий выход которого соединен с входом устройства обработки сигналов, связанным, так же как и блок управления, с блоком связи, выход которого является выходом антенной решетки, связанным с устройством обработки и отображения информации.
В частных случаях исполнения устройства расстояния между точками контакта соседних преобразователей могут быть выбраны из условия:

где d - расстояние между точками контакта;
rа - интервал пространственной корреляции шума материала изделия в направлении вдоль решетки;
rc - интервал пространственной корреляции шума материала изделия в направлении поперек решетки.
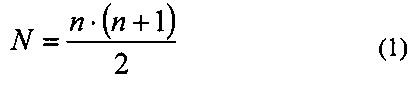
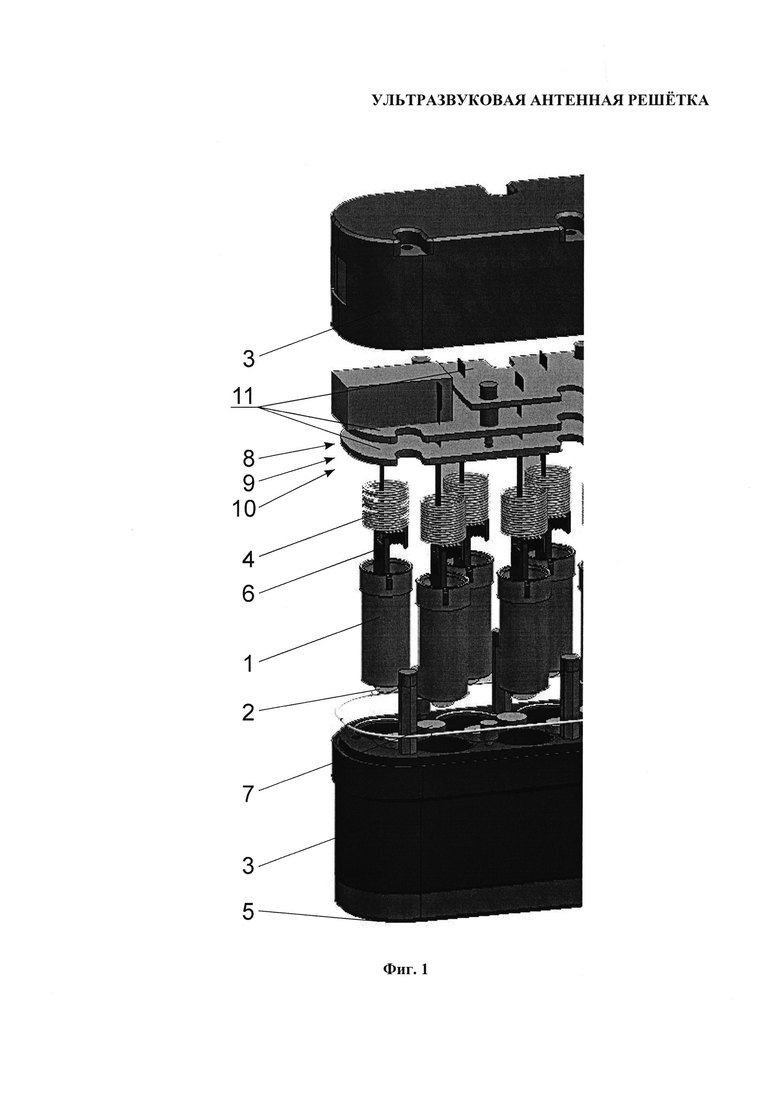
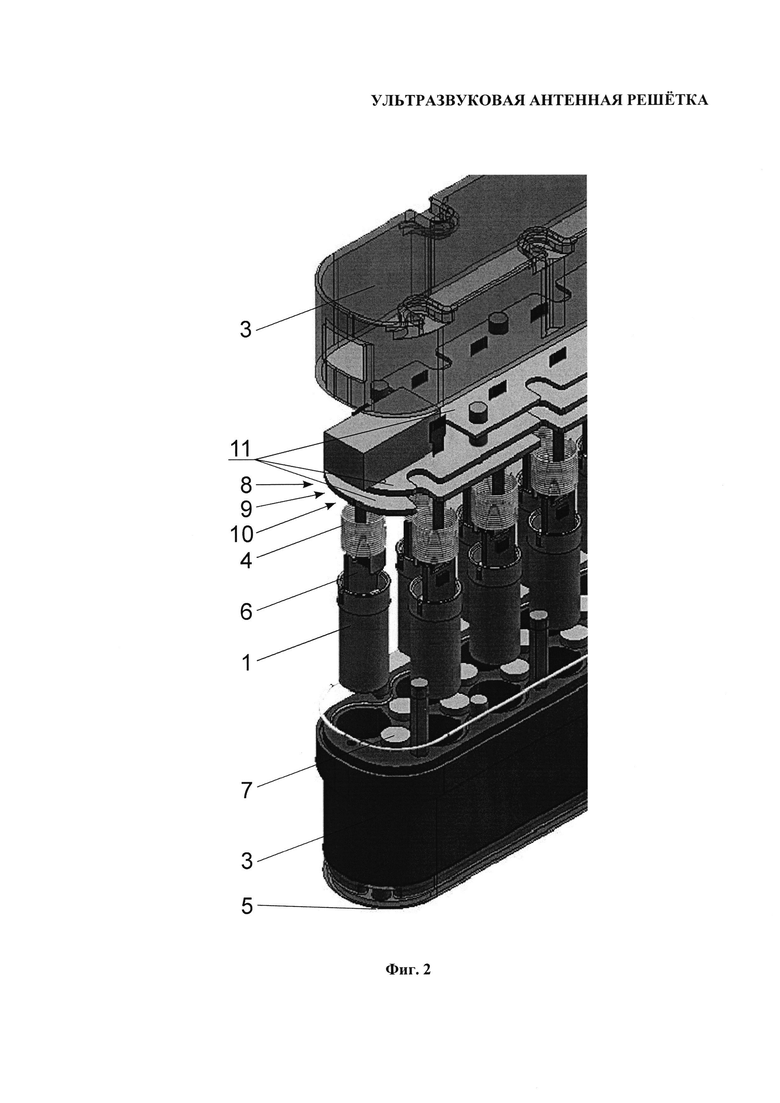
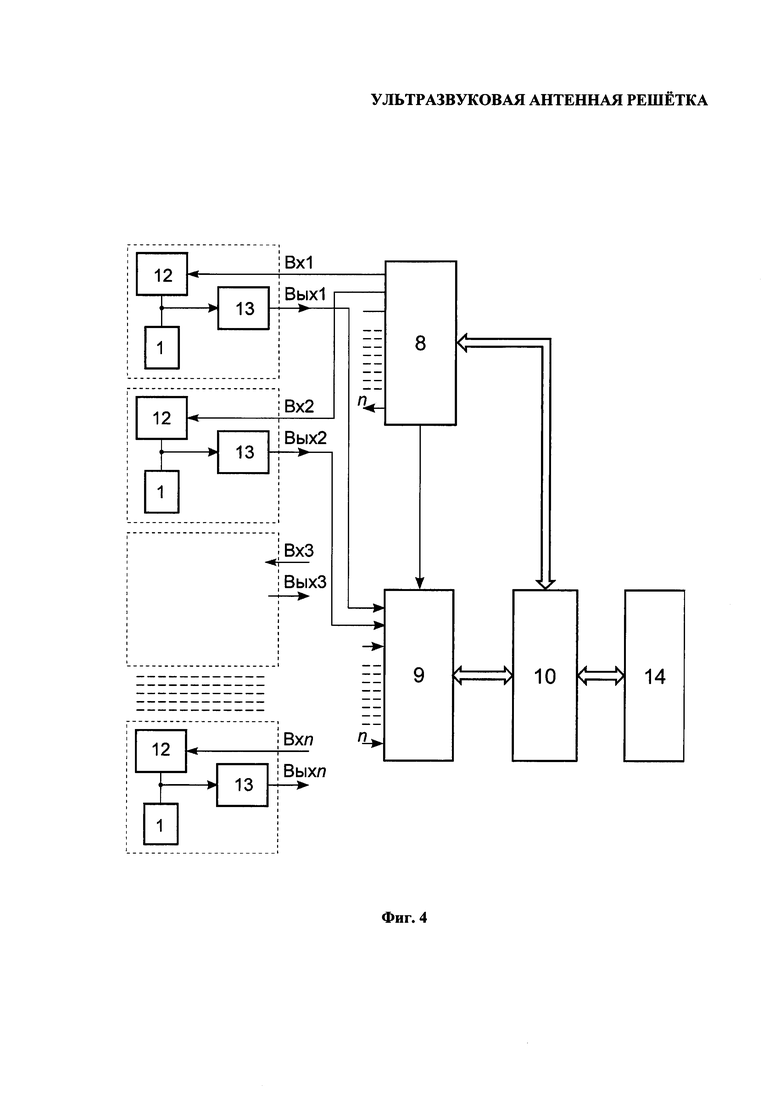
На фиг. 1 и 2 показана конструкция АР в полуразобранном виде для иллюстрации установки векторов колебательных смещений всех ультразвуковых преобразователей поперек продольной оси АР (фиг. 1) или вдоль продольной оси АР (фиг. 2), на фиг. 3 показано расположение контактных наконечников преобразователей (точечных контактов преобразователей) в плане вдоль зигзагообразной линии на рабочей поверхности АР, на фиг. 4 представлена полная блок-схема управления АР.
На фиг. 1 и 2 полуразобранная конструкция АР позволяет увидеть ее компоновку, в которой преобразователи 1 с контактными наконечниками 2 (точечные контакты преобразователей) установлены в корпусе 3, где также имеется индивидуальный прижимной механизм 4, выполненный, в частности, в виде пружины с возможностью возвратно-поступательного перемещения перпендикулярно рабочей поверхности 5 АР. Схема управления каждого преобразователя 1 в виде усилителя и генератора импульсов размещена на соответствующей электронной плате 6. Внутри преобразователя 1 содержится пьезоэлемент, определенно ориентированный относительно платы 6. Все преобразователи 1 АР с сухим точечным контактом (СТК) одинаковые. Дно корпуса преобразователя 1 выполнено таким образом, что колеблющаяся поверхность пьезоэлемента через материал дна и контактного наконечника 2 механически соединяется с поверхностью ОК в области, много меньшей длины волны УЗ-волн в материале ОК. Все свободные поверхности пьезоэлемента покрыты демпфирующим материалом.
На рабочей поверхности 5 АР размещены постоянные магниты 7, расположение которых и количество могут быть произвольными в зависимости от места на рабочей поверхности 5 и материала магнита 7, способного обеспечить необходимое усилие удержания АР на трубе соответствующего диаметра.
Общий блок управления 8, устройство 9 обработки сигналов и блок связи 10, показанные на фиг. 4 в блок-схеме, конструктивно размещены на платах 11 в корпусе 3 АР, показанном в полуразобранной конструкции на фиг. 1 и 2 в виде верхней и нижней частей.
Различное направление установки электронных плат 6 в преобразователях 1, приведенное на фиг. 1 и 2, показано для иллюстрации ориентации векторов колебательных смещений всех ультразвуковых преобразователей поперек продольной оси АР (фиг. 1) или вдоль продольной оси АР (фиг. 2).
Расположение преобразователей 1 с контактными наконечниками 2 (точечными контактами преобразователей) в плане вдоль зигзагообразной линии на рабочей поверхности 5 АР, показанное на фиг. 3 в соответствии с изобретением, в отличие от обычного эквидистантного расположения вдоль прямой линии имеет два преимущества: эксплуатационное и энергетическое, определяемое отношением сигнал/шум.
Эксплуатационное преимущество состоит в том, что АР, устанавливаемая вручную на трубу малого диаметра (порядка 25-40 мм), не соскальзывает с трубы, поскольку опирается не на одну линию контактных наконечников (точечных контактов), а на две линии, ориентированные вдоль образующей трубы.
Энергетическое преимущество АР с зигзагообразной расстановкой преобразователей перед линейной обусловлено более высоким отношением результирующего (после пространственно-временной обработки) полезного сигнала к шуму металла трубы, которое объясняется следующим образом.
Шум металла стенок труб, как показали экспериментальные исследования, является коррелированным с зондирующим сигналом и, самое главное, его реализации, принятые в паре разнесенных точек стенки трубы, коррелированы между собой. Интервал пространственной корреляции этого шума меняется в зависимости от ориентации точек приема при неизменном расстоянии между точками. При расположении точек приема вдоль трубы интервал примерно в 2 раза меньше, чем при расположении точек приема поперек оси трубы. Реальные значения интервалов корреляции шума для труб диаметрами от 30 до 1420 мм приблизительно равны 10-20 мм для точек приема вдоль трубы и 20-35 мм для точек поперек трубы. Причем больший интервал корреляции соответствует большему диаметру трубы.
Общая апертура АР выбирается сообразно требуемой функции направленности решетки. Шаг расстановки преобразователей (d - расстояние между точками контакта) в АР выбирают из компромиссных условий, исходя из интервала пространственной корреляции шума. С одной стороны, при заданной апертуре расстояние между точками контакта (шаг преобразователей) желательно выбирать как можно меньше, чтобы использовать много преобразователей в решетке, поскольку их суммарное действие (после пространственно-временной обработки сигналов) даст наибольший уровень полезного сигнала от дефектов. Однако при малом расстоянии между точками контакта, меньшем интервала пространственной корреляции, шум в реализациях принятых сигналов от соседних преобразователей решетки будет частично коррелированным. И отношение сигнал/шум (в результате пространственно-временной обработки) не будет больше, чем при большем расстоянии от меньшего количества преобразователей в АР. Поэтому расстояние d между точками контакта преобразователей в решетке следует выбирать соизмеримым с интервалом пространственной корреляции шума объекта контроля (ОК).
Наилучшие значения расстояний d между точками контакта (контактными наконечниками 2) преобразователей 1 находятся в пределах от значения, равного интервалу корреляции, до значения, на 40% большего этого интервала, в соответствии с формулой:

где d - расстояние между точками контакта;
rа - интервал пространственной корреляции шума материала изделия в направлении вдоль решетки;
rс - интервал пространственной корреляции шума материала изделия в направлении поперек решетки.
При расположении преобразователей 1 в АР в два ряда со сдвигом одного ряда относительно другого на половину расстояния преобразователей в ряду позволяет, не нарушая условия оптимальности выбора расстояния между точками контакта, расположить ряды преобразователей 1 максимально близко друг к другу, т.к. расстояние d между точками контакта преобразователей в данном случае равно гипотенузе треугольника, катеты которого - это расстояние между рядами и половина расстояния между преобразователями в ряду.
Блок схема на фиг. 4 содержит генератор импульсов 12 и усилитель 13 - для каждого преобразователя 1, общий блок управления 8, устройство 9 обработки сигналов и блок связи 10 для связи с устройством 14 обработки и отображения информации.
Выход каждого генератора импульсов 12 подключен к входу соответствующего преобразователя 1 и входу соответствующего усилителя 13, выход которого подключен к соответствующему информационному входу устройства 9 обработки сигналов. Вход генератора импульсов 12 соединен с соответствующим выходом блока управления 8, синхронизирующий выход которого соединен со входом устройства 9 обработки сигналов. Выход устройства 9 соединен, так же как и блок управления 8, с блоком связи 10, выход которого является выходом антенной решетки, связанным с устройством 14 обработки и отображения информации.
Генератор импульсов 12 может представлять собой транзисторный ключ или двухтактный ключ, обеспечивающий генерацию импульса в виде короткого меандра.
В качестве усилителей 13 обычно используются операционные усилители в микроисполнении. Усилители 13 в АР малошумящие с коэффициентом усиления порядка 20 дБ.
Блок управления 8 служит для выработки запускающих импульсов для генераторов импульсов 12, импульсов синхронизации для устройства 9 обработки сигналов и для блока связи 10. Сам блок управления 8 начинает работать по инициализирующему сигналу от устройства 14 обработки и отображения информации, поступающему через блок связи 10. И далее уже блок управления 8 синхронизирует всю работу АР совместно с устройством 14 обработки и отображения информации.
Блок управления 8 представляет собой микропроцессор, например, выполненный на программируемой логической интегральной схеме (ПЛИС) XC6SLX25-2FGG484I, с установленной в нем программой работы АР.
Устройство 9 обработки сигналов производит основное усиление сигналов от каждого предварительного усилителя 13 АР независимо от других сигналов, и преобразование сигналов в цифровую форму. Т.е. в устройстве обработки сигналов находятся независимые каналы усиления и аналого-цифрового преобразования (АЦП). Их количество равно количеству преобразователей в АР. Кроме того, в устройстве 9 есть память, в которую записываются принятые и усиленные сигналы от преобразователей 1.
Устройство 9 построено на стандартных операционных усилителях, микросхемах АЦП и памяти.
Блок связи 10 предназначен для передачи синхросигналов между АР и устройством 14 обработки и отображения информации и для передачи сигналов, записанных в памяти устройства 9 обработки сигналов АР в устройство 14 обработки и отображения информации.
Блок связи 10 представляет собой микроконтроллер, обслуживающий цифровые шины передачи данных. Он может быть выполнен, например, на ПЛИС XC7Z010-1CLG225I, которая содержит два ядра микроконтроллеров и интерфейс Ethernet.
Устройство 14 обработки и отображения информации выполняет функции пространственно-временной обработки сигналов, отображения результатов контроля ОК на дисплее и общего управления АР. Устройство содержит вычислительное устройство на основе процессора, оперативную память, память изображения, дисплей и устройство интерфейса с оператором. В качестве устройства обработки и отображения информации может использоваться персональный компьютер.
Заявляемая антенная решетка (АР) может работать в двух режимах: в режиме обнаружения дефектов в стенках труб диаметрами от 20-25 до приблизительно 250-300 мм при излучении ультразвуковых (УЗ) сигналов вдоль трубы и в режиме обнаружения дефектов в стенках труб больших диаметров (более 250 мм) при излучении УЗ-сигналов в направлении окружности трубы.
В обоих режимах используется эхоимпульсный метод контроля при волноводном распространении УЗ-волн в стенках трубы.
В первом режиме распространение УЗ-волн происходит вдоль трубы. Вся труба является одномерным волноводом, т.к. отсутствует селекция положения отражателей по окружности трубы. Единственным пространственным параметром обнаруженной несплошности в трубе является дальность от АР.
Во втором режиме распространение УЗ-волн происходит по окружности трубы в обе стороны от АР. В этом случае стенка трубы является двумерным волноводом. Пространственных параметров у обнаруженной несплошности в этом режиме два - это координаты по осям вдоль трубы и по окружности.
В этих режимах результат контроля - А-развертка в первом режиме и дефектограмма (в виде топограммы отражателей) во втором режиме - получается вследствие пространственно-временной обработки массива принятых реализаций сигналов из стенок трубы. Но алгоритмы обработки в устройстве 12 обработки и отображения информации разные.
Рассмотрим работу устройства 14 обработки и отображения информации в режиме излучения и приема УЗ-сигналов вдоль трубы.
Для работы АР в этом режиме все ее преобразователи 1 устанавливаются так, чтобы их векторы колебательных смещений были ориентированы поперек продольной оси АР (фиг. 1).
Оператор в месте контроля вручную устанавливает АР на поверхность трубы длинной стороной вдоль оси трубы. Магниты 7 прочно удерживают решетку на трубе.
По нажатию оператором кнопки на устройстве 14 обработки и отображения информации сигнал управления через блок связи 10 приходит на блок управления 8, с выходов которого подаются сигналы управления на входы генераторов импульсов 12 каждого преобразователя 1. При поступлении на вход генератора импульсов 12 пускового импульса с его выхода на преобразователь 1 подается короткий видеоимпульс, например, прямоугольной или треугольной формы или радиоимпульс, содержащий 2-4 полупериода колебаний, но, как правило, не более 10 полупериодов. Вид сигнала генератора выбирается в зависимости от состояния ОК, т.е. от степени затухания УЗ-волн в его материале, а также от того, на какой дальности от АР требуется обнаруживать дефекты в ОК.
С выхода преобразователя 1 начинается зондирование трубы ультразвуковыми импульсами по следующей схеме: первый преобразователь (со стороны одного из концов корпуса 3 решетки) излучает УЗ-импульс в стенку трубы, непосредственно после этого он же и остальные преобразователи 1 одновременно принимают сигналы с поверхности трубы. После требуемого интервала приема сигналов из трубы и некоторой паузы, нужной для затухания каких-либо колебаний стенок трубы, второй преобразователь излучает УЗ-импульс, и он же, а также все последующие преобразователи 1 принимают сигналы с поверхности трубы. И так далее происходит зондирование и прием сигналов. В конце этого цикла излучения и приема сигналов последний преобразователь излучает зондирующий сигнал и принимает сигналы с поверхности трубы.
Все принимаемые сигналы оцифровываются и записываются в память антенной решетки в устройстве 9 обработки сигналов, а затем, через блок связи 10, передаются в устройство 14 обработки и отображения информации.
В устройстве 14 обработки и отображения информации (компьютере) производится обработка массива этих сигналов с целью получения временной последовательности эхоимпульсов, отраженных от различных неоднородностей стенок трубы (коррозии, трещин, сварных швов, приваренных патрубков, крепежных деталей и т.п.), располагающихся со стороны одного из торцов АР. Для этого все принятые сигналы суммируются с индивидуальными временными сдвигами относительно сигнала, принятого первым преобразователем после излучения им зондирующего импульса. Временные сдвиги заранее рассчитываются, исходя из известной скорости распространения ультразвука вдоль трубы.
Принятые сигналы перед суммированием сдвигаются во времени так, чтобы эхосигнал от некоторого отражателя в стенке трубы, находящегося на некотором расстоянии от первого преобразователя антенной решетки, во всех принятых сигналах оказался бы в один и тот же момент времени. Тогда и все другие эхосигналы от других отражателей также окажутся совпадающими во времени. После суммирования всех сдвинутых во времени сигналов суммарная реализация детектируется и на экране отображается А-развертка эхоимпульсов от отражателей в трубе. Горизонтальная ось этой развертки проградуирована в единицах расстояния от первого преобразователя АР до какого-либо отражателя в трубе.
Таким образом, оператор получает на экране последовательность эхоимпульсов, по которым можно судить о дальности до потенциального дефекта. По амплитуде эхоимпульса можно оценить его размер.
При необходимости провести контроль в другом месте трубы оператор переставляет АР в это место и снова нажимает в устройстве 14 обработки и отображения информации кнопку, по сигналу от которой снова происходит весь изложенный выше процесс.
Детали изложенного процесса состоят в следующем.
АР от блока управления 8 производит поочередное зондирование ОК с приемом УЗ-сигналов из ОК и пересылает через блок связи 10 принятые и оцифрованные реализации (смесь шума и полезных эхосигналов) в устройство 14 обработки и отображения информации. Общее количество реализаций N равно:
где n - количество преобразователей в антенной решетке.
В устройстве 14 обработки и отображения информации все реализации записываются в память и происходит их дальнейшая пространственно-временная обработка, результатом которой является А-развертка эхосигналов на экране.
Сущность пространственно-временной обработки состоит в создании функции направленности АР вдоль трубы. Поскольку преобразователи практически не обладают направленностью, точнее - их функции направленности имеют два широких лепестка, обращенных максимумами вдоль трубы в одну и другую стороны (функция направленности имеет вид восьмерки), то в результате обработки реализаций принятых сигналов создается односторонняя направленность АР вдоль трубы.
Для этого предварительно вычисляется время распространения УЗ-сигнала вдоль трубы на расстояние р, которое можно назвать шагом расположения преобразователей 1 вдоль трубы, а время можно назвать шаговой задержкой. Это расстояние равно половине расстояния между ближайшими преобразователями 1 в любом ряду. Шаговая задержка tр при известной скорости с распространения УЗ-сигналов вдоль трубы равна:

Далее почти все N реализаций сигналов (кроме одной, - от совмещенной работы первого преобразователя АР) перезаписываются в память устройства 9 обработки сигналов с различными временными сдвигами, кратными шаговой задержке. В частности, реализация преобразователей: первый - второй (первый излучатель - второй приемник) сдвигается на одну шаговую задержку. Реализация: первый - третий - на две шаговые задержки и т.д. Реализация, например, третий - шестой - на семь шаговых задержек. Сдвиг происходит в сторону уменьшения времени задержки каждого мгновенного значения реализации. Поскольку реализации представлены в цифровом виде, то для сдвига из их начала «вырезается» нужное количество отсчетов сигнала.
Затем все реализации почленно суммируются и результирующая последовательность отсчетов суммарной реализации записывается в память.
Далее, в простейшем варианте, берется модуль каждого отсчета суммарной реализации и эта последовательность модулей отображается на экране в виде А-развертки. Вместо операции вычисления модуля лучший результат получается при вычислении огибающей суммарной реализации.
Рассмотрим работу устройства 14 обработки и отображения информации в режиме излучения и приема УЗ-сигналов поперек трубы.
Для работы АР в этом режиме все ее преобразователи 1 устанавливаются так, чтобы их векторы колебательных смещений были ориентированы вдоль продольной оси АР (фиг. 2).
Работа АР по излучению и приему реализаций сигналов из стенок трубы не отличается от изложенной выше для первого режима работы. Отличие только в направлении распространения зондирующих сигналов и принимаемых эхосигналов.
Все принимаемые сигналы оцифровываются и записываются в память устройства 9 обработки сигналов, а затем передаются в устройство 14 обработки и отображения информации. В устройстве 14 (компьютере) производится обработка массива этих сигналов с целью получения карты расположения в стенках трубы различных неоднородностей стенок, отражающих ультразвуковые сигналы. Карта (дефектограмма) представляет собой изображение развертки стенок трубы в двумерное полотно, на котором по обе стороны от зоны расположения АР в яркостной форме (или цветом) отображены образы неоднородностей. По этой дефектограмме можно определить координаты расположения неоднородностей, т.е. их положение вдоль трубы и положение на ее окружности.
Преобразователи в АР обладают очень широкой диаграммой направленности в виде восьмерки. Поэтому они излучают и способны принимать эхосигналы в направлении окружности трубы в широком диапазоне углов относительно направления поперек трубы. Этот диапазон углов приблизительно составляет ±70-80 градусов.
Каждый записанный в памяти устройства 9 АР сигнал от каждой пары преобразователей, проработавших как излучатель и приемник, представляет собой длинную последовательность колебаний, содержащую в себе шумы металла и отраженные импульсы от различных неоднородностей стенок трубы. Эти импульсы имеют длительность, примерно равную длительности зондирующего импульса, т.е. всего два -три периода (типично) колебаний. Длительность же всего записанного сигнала определяется максимальной дальностью отражателя, который требуется отобразить на дефектограмме. Эта дальность определяется диаметром контролируемой трубы, поэтому длительность во много раз больше длительности зондирующего импульса, т.е. в 100-300 раз.
Каждый импульс от неоднородности стенки трубы имеет определенное время задержки относительно момента посылки зондирующего сигнала. Это время равно частному от деления расстояния, пройденного ультразвуковой волной от излучателя к неоднородности и затем к приемнику, на скорость распространения волны. Поэтому время задержки сигнала от любой возможной неоднородности для любой пары элементов АР известно (рассчитано заранее по заданным координатам ожидаемой неоднородности и известной скорости ультразвука).
Алгоритм обработки сигналов для реконструкции дефектограммы состоит в следующем.
Дефектограмма реконструируется поточечно. Для каждой точки изображения в соответствующую ячейку памяти изображения суммируются с записью отрезки всех сигналов (ото всех пар преобразователей) длительностью, равной длительности зондирующего импульса с временами задержки, равными рассчитанным временам для соответствующей точки стенки трубы. Результирующая сумма этих отрезков детектируется (находится огибающая этого суммарного отрезка сигнала) и максимум огибающей в виде яркости или цвета отображается на экране в точке, соответствующей по координатам визуализируемой точке стенки трубы.
Если в стенке трубы в некоторой точке трубы нет неоднородностей, то на экране в соответствующей точке изображения отобразится только некоторый уровень шума, накопленный из данной точки стенки. Если неоднородность есть, то сумма эхосигналов от нее будет намного больше шума, так как в ячейке памяти когерентно накопится много эхосигналов от этой неоднородности.
Алгоритм пространственно-временной обработки принятых реализаций в данном случае следующий.
Пусть ось X системы координат направлена вдоль оси трубы, а ось Y - в перпендикулярном направлении. В данном плоском случае толщиной стенки трубы можно пренебречь, т.к. толщина много меньше длины УЗ-волны, распространяющейся в стенках трубы. Любая неоднородность металла, независимо от того, поверхностная она или внутренняя, одинаково воздействует на УЗ-сигнал, отражая его обратно к АР. Поскольку диаметр трубы, как правило, много больше УЗ-волны, то стенку трубы можно рассматривать как плоскость.
Каждая точка реконструируемого изображения отображает величину, пропорциональную отражательной способности соответствующей ей точки стенки трубы. Для этого в ячейке памяти устройства 14 обработки и отображения информации когерентно суммируются все эхосигналы, пришедшие к АР из этой точки трубы. Так, например, суммарный эхосигнал S(x,y) от точки А(х,у) стенки трубы с координатами х,у в общем виде представляет собой сумму:

где Us,r - эхосигнал, пришедший из точки А(х,у), выбранный из принятой реализации сигналов от излучающего преобразователя с номером s и приемного преобразователя с номером r в интервале времени (ts,r,ts,r+τ);
ts,r - время распространения УЗ-колебаний по пути от излучающего преобразователя с номером s до точки А(х,у) и обратно к приемному преобразователю с номером r;
τ - длительность выборки (отрезка) реализации, приблизительно равная длительности зондирующего сигнала;
Ds, Dr - значения функций направленности преобразователей в направлении от излучающего преобразователя с номером s на точку А(х,у) и в направлении от приемного преобразователя с номером r на эту точку соответственно;
n - количество преобразователей в АР.
Время ts,r выражается следующим образом:

где xs, ys и хr, уr - координаты излучающего преобразователя с номером s и приемного преобразователя с номером r соответственно;
с - скорость распространения УЗ-волн в стенках трубы.
В представленном устройстве в соответствии с описанием показано осуществление возможности контроля изделий с малыми поперечными размерами: труб, прутков малого диаметра или таврового профиля. При этом АР используется с внешним устройством обработки и отображения информации в виде компьютера или специализированного электронного блока с экраном.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ОБЪЕКТОВ ИЗ ТВЁРДЫХ МАТЕРИАЛОВ, УЛЬТРАЗВУКОВОЙ ВЫСОКОЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) И АНТЕННАЯ РЕШЁТКА С ПРИМЕНЕНИЕМ СПОСОБА | 2017 |
|
RU2657325C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| Способ ультразвукового контроля толщины стенки трубопровода | 2018 |
|
RU2687086C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458342C1 |
| Способ ультразвуковой томографии | 2016 |
|
RU2639986C1 |
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЕТКА В ВИДЕ ДВУХМЕРНОЙ МАТРИЦЫ | 1994 |
|
RU2080592C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ СТЕПЕНИ ПОВРЕЖДЕННОСТИ МЕТАЛЛОВ КОНТЕЙНЕРОВ | 2015 |
|
RU2614186C1 |
| Способ ультразвуковой дефектоскопии трубопровода | 2024 |
|
RU2834582C1 |
Использование: для дефектоскопии протяженных изделий эхометодом. Сущность изобретения заключается в том, что ультразвуковая антенная решетка, содержащая установленные в корпусе ультразвуковые преобразователи с сухим точечным контактом на рабочей поверхности решетки, индивидуальным прижимным механизмом с возможностью возвратно-поступательного перемещения перпендикулярно рабочей поверхности решетки и схемой управления, при этом преобразователи расположены в плане вдоль зигзагообразной линии с точками контакта в ее вершинах, векторы колебательных смещений всех ультразвуковых преобразователей ориентированы поперек или вдоль продольной оси антенной решетки, дополнительно установлены постоянные магниты, размещенные на рабочей поверхности решетки, схема управления выполнена в виде усилителя и генератора импульсов для каждого преобразователя, общего блока управления, устройства обработки сигналов и блока связи, при этом выход каждого генератора импульсов подключен к входу соответствующего преобразователя и входу соответствующего усилителя, выход которого подключен к соответствующему информационному входу устройства обработки сигналов, вход генератора импульсов соединен с соответствующим выходом блока управления, синхронизирующий выход которого соединен с входом устройства обработки сигналов, связанным, так же как и блок управления, с блоком связи, выход которого является выходом антенной решетки, связанным с устройством обработки и отображения информации. Технический результат: обеспечение возможности создания устройства с возможностью контроля изделий как с малыми поперечными размерами, так и изделий с двоякой протяженностью. 1 з.п. ф-лы, 4 ил.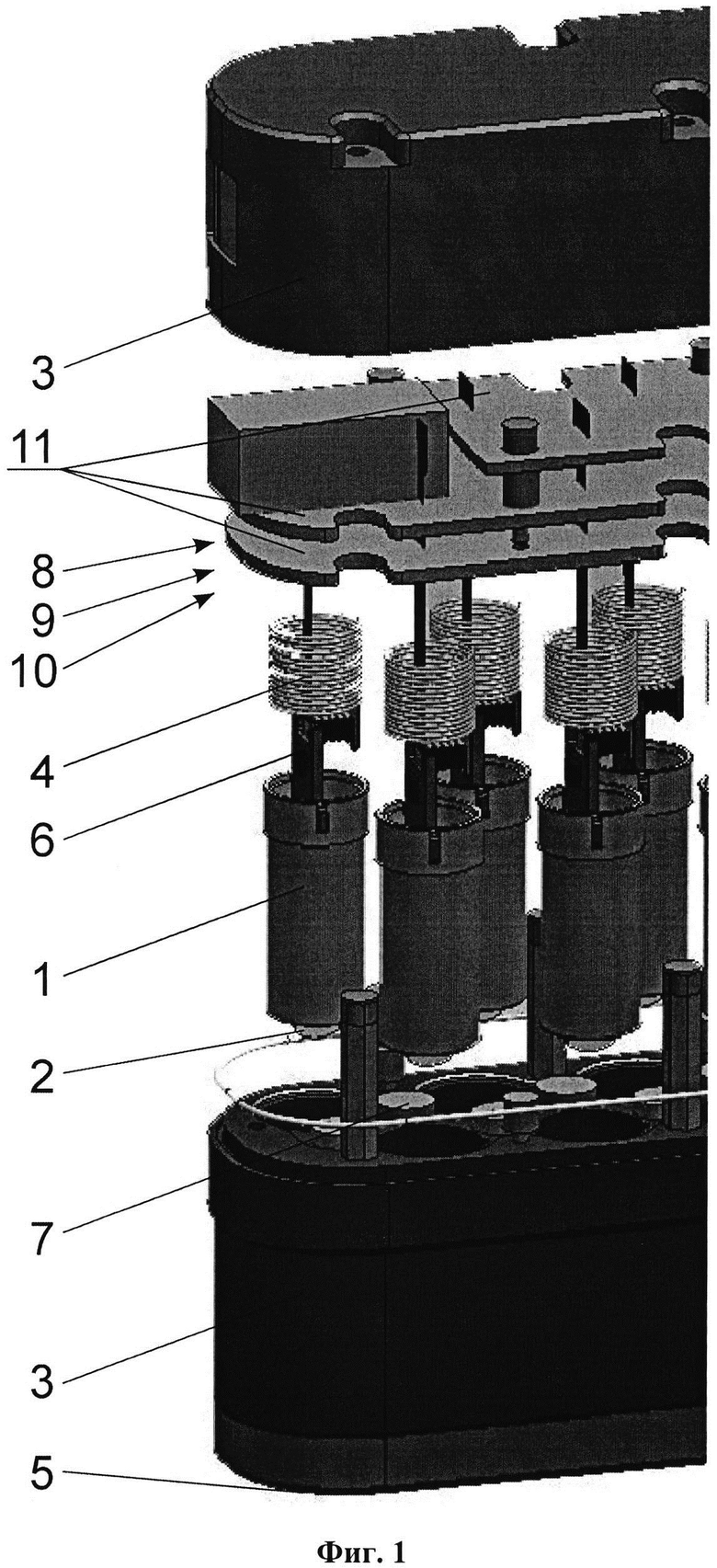
1. Ультразвуковая антенная решетка, содержащая установленные в корпусе ультразвуковые преобразователи с сухим точечным контактом на рабочей поверхности решетки, индивидуальным прижимным механизмом с возможностью возвратно-поступательного перемещения перпендикулярно рабочей поверхности решетки и схемой управления, отличающаяся тем, что преобразователи расположены в плане вдоль зигзагообразной линии с точками контакта в ее вершинах, векторы колебательных смещений всех ультразвуковых преобразователей ориентированы поперек или вдоль продольной оси антенной решетки, дополнительно установлены постоянные магниты, размещенные на рабочей поверхности решетки, схема управления выполнена в виде усилителя и генератора импульсов - для каждого преобразователя, общего блока управления, устройства обработки сигналов и блока связи, при этом выход каждого генератора импульсов подключен к входу соответствующего преобразователя и входу соответствующего усилителя, выход которого подключен к соответствующему информационному входу устройства обработки сигналов, вход генератора импульсов соединен с соответствующим выходом блока управления, синхронизирующий выход которого соединен с входом устройства обработки сигналов, связанным, так же как и блок управления, с блоком связи, выход которого является выходом антенной решетки, связанным с устройством обработки и отображения информации.
2. Ультразвуковая антенная решетка по п. 1, отличающаяся тем, что расстояния между точками контакта соседних преобразователей выбраны из условия:

где d - расстояние между точками контакта;
rа - интервал пространственной корреляции шума материала изделия в направлении вдоль решетки;
rс - интервал пространственной корреляции шума материала изделия в направлении поперек решетки.
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЕТКА В ВИДЕ ДВУХМЕРНОЙ МАТРИЦЫ | 1994 |
|
RU2080592C1 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЕТКА | 2007 |
|
RU2335038C1 |
| Способ денитрации серной кислоты | 1960 |
|
SU137900A1 |
| ПОСТОЯННО УСТАНОВЛЕННАЯ ЛИНЕЙНАЯ РЕШЕТКА УЛЬТРАЗВУКОВЫХ ДАТЧИКОВ С СУХИМИ КОНТАКТАМИ | 2010 |
|
RU2525718C2 |
| US 20030136195A1, 24.07.2003 | |||
| US 20040016299A1, 29.01.2004. | |||

