Изобретение относится к технике ультразвукового (УЗ) неразрушающего контроля металлических изделий, ограниченных в одном направлении и протяженных в других направлениях. Такими изделиями являются листы, трубы и различные оболочки резервуаров и подобных им объектов. Изобретение может использоваться для обнаружения в этих объектах различных нарушений сплошности и однородности металла с определением их координат и размеров.
Наиболее целесообразно применение способа и системы для его осуществления при автоматизированном сплошном контроле качества трубопроводов и продукции трубного производства.
Известен способ УЗ дефектоскопии трубопровода, заключающийся в обработке эхосигналов от излучаемых в объект контроля (ОК) УЗ волн двумя двунаправленными электромагнитно-акустическими (ЭМА) преобразователями в радиальном направлении при движении преобразователей вдоль трубопровода. Принятые этими же преобразователями реализации УЗ колебаний волн, распространяющихся в стенках трубопровода в радиальном направлении, подвергаются временным сдвигам относительно друг друга таким образом, чтобы эхосигналы с одного окружного направления трубопровода складывались в фазе, а другого вычитались. Причем путем временного сдвига реализаций сначала в одну сторону, а затем в другую сложение и вычитание получается для условно левой и правой частей трубопровода. В результате получается изображение распределения дефектов в стенках трубопровода как слева, так и справа от линии движения преобразователей по трубопроводу. По этому способу работает система ультразвуковой дефектоскопии трубопровода (патент RU 102810 U1, 2011).
Недостатки этого способа.
Чувствительность и разрешающая способность способа недостаточны для обнаружения поперечно ориентированных к оси трубопровода дефектов и малых по размерам очагов язвенной коррозии металла стенок.
Причина в том, что диаграмма направленности ЭМА преобразователей достаточно узкая. Поэтому эхосигналы приходят к преобразователям практически только с окружных направлений.
ЭМА преобразователи формируют длинные по форме зондирующие импульсы и только одного типа акустических нормальных волн в стенках трубопровода. Импульсы содержат около 10 периодов заполнения. Поэтому разрешающая способность по дальности от преобразователей мала, а чувствительность к обнаружению отражателей низкая.
Алгоритм обработки принятых реализаций УЗ колебаний не учитывает вклада отражений от дефектов, располагающихся в направлениях от преобразователей, составляющих углы к оси трубопровода, не равные 90 градусам.
Известен способ ультразвукового контроля объектов из крупноструктурных материалов, сущность которого состоит в том, что на поверхности объекта располагают антенную решетку, состоящую из УЗ преобразователей с сухим точечным контактом, возбуждают в ОК УЗ объемные волны и принимают реализации колебаний поверхности ОК, содержащие эхосигналы от различных неоднородностей материала ОК. В результате пространственно-временной обработки принятых реализаций реконструируют изображения сечений внутренней структуры ОК, по которым судят о наличии и координатах внутренних дефектов материала ОК. По этому способу работает ультразвуковая антенная решетка в виде двухмерной матрицы (патент RU 2080592 С1, 1997).
Этот способ рассчитан на контроль объемных объектов с использованием объемных УЗ волн, причем никакого движения решетки по поверхности объекта с соответствующей обработкой сигналов из разных положений антенной решетки на поверхности ОК не предусмотрено. Обнаружение отражателей в ОК возможно только под областью расположения антенной решетки. Обнаруживать отражатели на некотором отдалении от решетки данный способ не позволяет. Поэтому способ не подходит для сплошного контроля длинномерных тонкостенных (не объемных) изделий.
Наиболее близким аналогом является способ УЗ контроля сварных швов, при котором при перемещении вдоль шва транспортной платформы осуществляется излучение в область сварного соединения УЗ сигналов и прием сигналов, отраженных от нарушений сплошности и однородности металла и прошедших через сварной шов. Излучение и прием УЗ сигналов производится четырьмя линейными ЭМА решетками по две с каждой стороны сварного шва. Элементы решеток расположены на поверхности ОК вдоль двух пересекающихся прямых линий. Точка пересечения линий при движении платформы перемещается над осью шва. Каждое положение платформы на поверхности ОК характеризуется расстоянием от начальной точки движения платформы. Для этого используется датчик пути. По этому способу работает комплекс для ультразвукового контроля изделий (патент RU 2515957 С1, 2014).
В данном способе используется пространственно-временная обработка реализаций, содержащих эхосигналы, принятые не только элементами той же решетки, которая излучила зондирующие импульсы, но и элементами других решеток. При движении платформы система антенных решеток позволяет реконструировать набор изображений поперечных сечений шва и околошовной зоны, параллельных друг другу, по которым судят о наличии и координатах дефектов в объеме сварного соединения.
Способ рассчитан в основном на контроль локальной зоны изделия (сварного соединения) с помощью одного типа УЗ волн - поперечных с горизонтальной поляризацией. В одном из режимов используется волноводное распространение поперечных УЗ волн для построения карты расположения дефектов в стенках трубопровода. Однако излучение и прием волн происходит только в окружном направлении трубопровода в достаточно узком секторе углов. Поэтому чувствительность способа низкая, особенно к трещинам с поперечной к оси трубопровода ориентацией.
Техническая задача, решаемая предложенным способом УЗ контроля, заключается в достижении максимально возможной чувствительности к обнаружению малоразмерных и слабо отражающих дефектов в стенках металлического трубопровода: дефектов в виде малых очагов язвенной коррозии, а также трещин, поперечно ориентированных относительно оси трубопровода, с одновременно высокой разрешающей способностью, как в продольном, так и в поперечном направлениях трубопровода.
Эта задача решена в способе ультразвукового контроля трубопровода, согласно которому при перемещении вдоль трубопровода периодически возбуждают ультразвуковые колебания в пределах заданной области его поверхности, связанной с диагностическим устройством, в выбранном интервале времени принимают из этой же области реализации ультразвуковых колебаний от акустических нормальных волн, прошедших по стенкам трубопровода и отраженных от различных нарушений сплошности материала стенок, и с помощью совместной обработки принятых реализаций ультразвуковых колебаний определяют распределение дефектов в стенках трубопровода, при этом возбуждение и прием ультразвуковых колебаний осуществляют в нескольких точках, соответствующих расположению акустических контактов приемно-излучающих элементов диагностического устройства в указанной области внешней или внутренней поверхностей трубопровода, возбуждение ультразвуковых колебаний производят касательными к поверхности трубопровода колебательными силами поочередно в каждой точке, а прием колебаний осуществляют одновременно во всех точках в пределах указанной области, причем принимают реализации колебаний ото всех основных типов акустических нормальных волн, распространяющихся по стенкам трубопровода во все стороны от точек возбуждения ультразвуковых колебаний, и из реализаций колебаний, принятых во всех точках поверхности трубопровода при перемещении вдоль него, по предварительно рассчитанным временам задержки для всех типов акустических нормальных волн выбирают эхосигналы от каждой точки поверхности стенок, когерентно суммируют их для каждой точки поверхности отдельно для каждого типа волн, вычисляют амплитуды суммарных сигналов и строят нормированные распределения этих амплитуд в соответствии с координатами точек поверхности стенок трубопровода отдельно для каждого типа акустических волн, после чего составляют одно распределение величины, значения которой равны максимальным значениям амплитуд суммарных сигналов от разных типов акустических волн для совпадающих по координатам точек поверхности стенок трубопровода, и по этому распределению судят о наличии и величине дефектов в стенках трубопровода.
Частные случаи использования способа состоят в следующем:
- принимают реализации колебаний симметричной волны Лэмба нулевого порядка;
- принимают реализации колебаний антисимметричной волны Лэмба нулевого порядка;
- принимают реализации колебаний поперечной нормальной волны нулевого порядка;
- времена задержки вычисляют, используя заданные координаты расположения акустических контактов элементов диагностического устройства и координаты отражающих точек на поверхности трубопровода, заданные с определенным шагом по двумерной сетке на поверхности трубопровода, и известные групповые и фазовые скорости распространения акустических нормальных волн в стенках трубопровода.
Физический смысл способа состоит в том, что в стенках трубопровода поочередно возбуждают УЗ колебания в нескольких точках с известными координатами на поверхности трубы. Эти точки представляют собой упорядоченную группу. Взаимное расположение точек в группе не меняется при перемещении всей группы вдоль трубопровода.
Из этих же точек одновременно принимают УЗ колебания из стенок. При одновременном перемещении этих точек вдоль трубопровода периодически повторяют поочередное возбуждение в этих точках УЗ колебаний в стенках трубопровода с приемом УЗ колебаний одновременно изо всех точек.
В результате в памяти накапливается массив реализаций УЗ колебаний. Каждая реализация является результатом излучения УЗ волн в стенку трубопровода из одной точки и приема колебаний в другой точке или, в частности, в той же самой, в которой колебания были возбуждены. Если в группе n точек, то общее количество реализаций, полученное в некоторой зоне расположения точек на трубопроводе, равно n2.
Скорость перемещения точек акустического контакта вдоль трубопровода, из которых исходят УЗ колебания и в которых происходит прием колебаний, настолько мала в сравнении со скоростью распространения УЗ колебаний в стенках трубы, что можно считать, что точки возбуждения колебаний и приема колебаний в некотором интервале времени практически совпадают и как бы неподвижны.
Каждая реализация записанных колебаний представляет собой смесь (аддитивную сумму) полезных эхосигналов от различных неоднородностей металла стенок трубопровода и шума.
Возбуждение УЗ колебаний производится импульсными касательными к поверхности металла колебательными силами. В стенках трубопровода при этом возбуждаются различные моды нормальных волн (этот термин означает «волны в пластинах»). Основные из них - это симметричная и антисимметричная волны Лэмба нулевого порядка и поперечная нормальная волна нулевого порядка.
Поскольку координаты точек возбуждения и приема УЗ колебаний известны, то времена задержки УЗ сигналов от них до любой точки поверхности стенок рассчитываются просто через известные скорости распространения УЗ колебаний и расстояние до них.
По этим временам задержки из реализаций принятых колебаний извлекаются эхосигналы (короткие отрезки колебаний с длительностью, примерно равной длительности зондирующих сигналов) от каждой точки поверхности стенок трубы. И для каждой точки стенок эхосигналы суммируются с записью результата в соответствующую ячейку памяти. Совокупность амплитуд суммарных эхосигналов, распределенная в пространстве в соответствии с координатами отражающих точек трубы, представляет собой сканограмму вероятных дефектов стенок.
Поскольку в стенках трубы от точек возбуждения колебаний распространяются нормальные акустические волны разных типов с разными скоростями распространения, то такие сканограммы (распределения амплитуд суммарных сигналов) получают отдельно для каждого типа волн. Затем эти сканограммы совмещают вместе в соответствии с координатами точек. Результирующие значения полученной совмещенной сканограммы равны максимальным значениям для каждой координатной точки изо всех совмещаемых сканограмм. Результирующую (совмещенную) сканограмму можно назвать дефектограммой, по которой судят о дефектности стенок трубопровода.
Дефектограмма может быть представлена на экране прибора или на бумаге в виде развертки трубы, т.е. может представлять собой двумерное плоское изображение, или в виде цилиндрической поверхности, адекватно соответствующей стенкам трубы.
Направленность излучения и приема УЗ колебаний в точках акустического контакта, т.е. в точках действия колебательных сил, в общем случае практически отсутствует, т.е. излучение осуществляется во все стороны вдоль стенок. Однако направления максимумов диаграмм направленности излучения и приема УЗ волн для разных типов нормальных волн различны. Для симметричной и антисимметричной мод волн Лэмба максимумы диаграмм направленности ориентированы в направлении действия колебательных сил, а для поперечной нормальной волны - в перпендикулярном по отношению к колебательной силе направлении. Причем максимумов диаграмм направленности для каждого типа волн всегда два, в двух взаимно противоположных направлениях.
Совместная пространственно-временная обработка эхосигналов, извлеченных из реализаций УЗ колебаний, принятых из множества точек поверхности трубы, разнесенных в пространстве, позволяет однозначно восстановить картину распределения неоднородностей в стенках трубы. Это аналог метода триангуляции.
Использование способа повышает качество изображения, т.е. чувствительность системы, реализующей способ, и ее разрешающую способность для осуществления не только отображения мест, где находятся дефекты, но и для оценки их размеров. Кроме того, благодаря применению нескольких типов акустических волн, распространяющихся не только по окружности трубы, но и в направлениях вдоль оси трубы и под разными углами к ней, чувствительность такой системы контроля примерно одинакова к отражателям разной формы: как к продольным трещинам, так и к поперечным, а также к локальным язвам коррозии стенок.
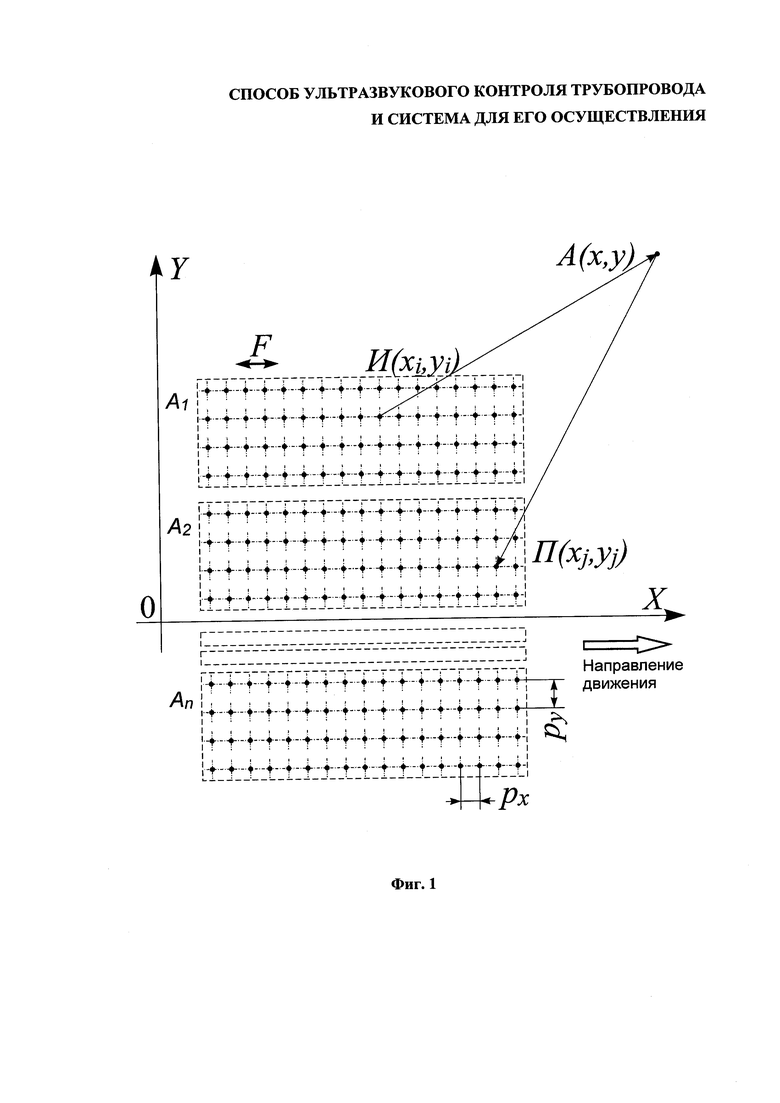
Иллюстрация алгоритма пространственно-временной обработки сигналов представлена на фиг. 1, где показана схема расположения точек возбуждения и приема УЗ колебаний на поверхности трубопровода.
Пусть на поверхности трубопровода задана Декартова система координат. Ось X направлена вдоль трубопровода.
Длина траектории распространения УЗ сигнала от произвольно взятой точки И излучения зондирующего сигнала с координатами (xi, yi) к произвольной точке А поверхности трубопровода с координатами (x, y) и затем к некоторой точке П приема колебаний с координатами (xj, yj) в данной системе координат равна

где i, j - номера точек излучения и приема УЗ колебаний, соответственно.
Время задержки УЗ сигнала, прошедшего по этой траектории со скоростью с:

Здесь в качестве скорости с используется значение групповой скорости соответствующего типа нормальной волны.
Для получения значения отражательной способности отражателя, находящегося в точке А поверхности трубопровода, все эхосигналы ото всех пар точек излучения и приема когерентно суммируются. Для этого из соответствующих реализаций УЗ колебаний выбираются отрезки с временами задержки, вычисленными по формуле (2). При этом перебираются все номера точек излучения и точек приема, но при совпадении номеров, т.е. при i=j отрезки сигналов суммируются с весом, равным 1, а при несовпадении номеров (i≠j) - с весом 1/2. Длительность τ суммируемых отрезков приблизительно соответствует длительности τз зондирующих импульсов.
В результате вычисляется суммарный эхосигнал от точки А
В формуле (3) n - общее количество точек, в которых производится возбуждение и прием УЗ колебаний. Эти точки могут располагаться на поверхности трубопровода сплошным полем или иметь некоторые промежутки между меньшими полями. На результат такое их расположение в плане не влияет. Разбиение всей группы точек на части (подгруппы) А1, А2 и т.д. (см. фиг. 1) может потребоваться в конкретной ситуации контроля.
При движении группы точек вдоль трубопровода весь процесс зондирования и обработки сигналов повторяется. При этом суммарный эхосигнал от точки А накапливается вследствие добавления к нему (досуммирования) таких же слагаемых, вычисляемых по формулам (1), (2) и (3), но с учетом того, что при смещении группы точек вдоль оси Х на расстояние Δх, координаты х точек возбуждения и приема получают приращения, равные Δх. Это досуммирование происходит до тех пор, пока время задержки выбираемого отрезка реализации для какой-либо траектории не превысит времени Тmax приема колебаний, т.е. не выйдет за пределы интервала приема из-за удаления точки А от точек возбуждения и приема колебаний.
После окончания накопления эхосигнала от точки А вычисляется огибающая этого суммарного эхосигнала и значение ее амплитуды UA запоминается. То же самое производится для всех точек поверхности трубопровода, отстоящих от группы точек возбуждения и приема УЗ колебаний на расстояния, превышающие с некоторым запасом величину

Такие же операции (расчеты по формулам 1-4) производятся и с эхосигналами других типов нормальных волн, распространяющихся со своими скоростями по стенкам трубопровода.
Некоторая разница в алгоритме для разных типов волн состоит в следующем. При вычислениях для поперечной нормальной волны используется только одно значение скорости волн (в формуле 2), т.к. у этой волны нет дисперсии скорости. А при оперировании с сигналами симметричной и антисимметричной нормальных волн каждый отрезок реализации со временем задержки, вычисленным по формуле (2) дополнительно проходит через корректирующий фильтр, выравнивающий времена задержки частотных составляющих сигнала, различие которых вызвано неодинаковой для них фазовой скоростью в полосе, занимаемой спектром сигнала.
В результате в памяти формируются распределения амплитуд Us(x, y), Ua(x, y) и Ush(x, y) огибающих суммарных эхосигналов соответственно симметричной, антисимметричной и поперечной нормальных волн в стенках трубопровода в зависимости от координат точек поверхности.
Затем выполняется наложение этих распределений таким образом, что значению U(x, y) результирующего распределения в любой точке присваивается амплитуда одного из полученных частных распределений Us(x, y), Ua(x, y) или Ush(x, y), наибольшая в данной точке. Результирующее распределение используется для обнаружения дефектов в стенках трубопровода и для оценки их размеров и степени опасности для эксплуатации трубопровода.
Для возбуждения и приема нескольких типов нормальных волн в стенках трубопровода колебательные силы F в точках акустического контакта системы возбуждения и приема сигналов направлены так, как показано на фиг. 1 двунаправленной стрелкой.
Расстояния рх, ру между точками возбуждения и приема УЗ колебаний в направлениях вдоль и поперек оси трубопровода соответственно выбраны, исходя из интервала пространственной корреляции акустического шума стенок трубопровода. Наилучшее отношение сигнал/шум получается при выборе этих расстояний в пределах от одного интервала пространственной корреляции шума до величины, приблизительно на 40% большей.
Применение всех основных типов нормальных УЗ волн, распространяющихся в стенках трубопровода в разные стороны, для независимого построения распределений отражающей способности точек поверхности трубопровода позволяет по результату наложения этих распределений получить высокоинформативную дефектограмму. Если пятна язвенной коррозии, сравнимые по размерам с длиной волны, рассеивают УЗ волны во все стороны, то трещины отражают УЗ сигналы направленно. И поскольку они имеют разную ориентациию, то могут быть направления, с которых от них эхосигналы могут не прийти, если использовать только один тип УЗ волн. Но эхосигналы другого типа волн с таких направлений присутствуют. Поэтому эхосигналы от отражателей контролируемого трубопровода у разных типов волн взаимно дополняют друг друга, что способствует достижению максимально возможной чувствительности способа контроля. Использование еще и высших типов нормальных волн нерационально. Это приведет к существенному усложнению способа обработки сигналов и времени обработки, а повышение чувствительности будет незначительным.
Поскольку в способе используются короткие зондирующие сигналы (не длиннее двух периодов колебаний), то это обеспечивает и высокую разрешающую способность способа и аппаратуры по обеим координатам x и y.
Рассмотрим систему для осуществления вышеописанного способа.
За аналоги этой системы можно принять устройства, описанные в вышеуказанных патентах 2080592, 102810 и 2515957.
Наиболее близкий аналог - комплекс для ультразвукового контроля изделий, содержащий сканирующую Х-образную систему электромагнитно-акустических антенных решеток, состоящую из четырех линейных приемно-излучающих антенных решеток, расположенных в плане таким образом, что центры элементов антенных решеток лежат на двух пересекающихся прямых линиях, причем каждая антенная решетка расположена по одну сторону от точки их пересечения и снабжена соответствующим блоком импульсного подмагничивания, соединенным своим входом с одним из четырех выходов синхронизатора, пятый выход которого подключен ко входу генератора импульсов возбуждения, каждый из четырех выходов которого подключен ко входу соответствующей антенной решетки, выходы антенных решеток подключены к соответствующим входам многоканального приемного тракта, оптическое измерительное устройство, выходом подключенное к первому входу вычислительного блока, который также имеет связь через соответствующие шины обмена данных с синхронизатором, многоканальным приемным трактом и блоком отображения результатов контроля, по меньшей мере, все антенные решетки, блоки импульсного подмагничивания и оптическое измерительное устройство установлены на подвижной платформе, оснащенной датчиком пути и блоком управления движением платформы, при этом выход датчика пути подключен ко второму входу вычислительного блока, выход которого соединен с входом блока управления движением платформы, а каждый из элементов антенных решеток представляет собой пару изолированных катушек - излучающую и приемную, расположенных одна на другой и выполненных прямоугольными или овальными, при этом большая сторона прямоугольника или большая ось овала перпендикулярна соответствующей прямой линии Х-образной системы (RU 2515957 С1, 2014).
Невозможность достижения этим комплексом высокой чувствительности при дистанционном обнаружении дефектов для построения карты их расположения в стенках трубопровода связана с использованием только одного типа УЗ волн - поперечных с горизонтальной поляризацией, распространение которых ограничено в сравнительно небольшом диапазоне углов от антенных решеток в направлении окружности трубопровода. Следствием этого является низкая чувствительности к обнаружению малоразмерных и слабо отражающих дефектов в стенках металлического трубопровода.
В связи с этим техническая задача, решаемая системой УЗ контроля трубопровода, заключается в достижении максимально возможной чувствительности к обнаружению малоразмерных и слабо отражающих дефектов в стенках металлического трубопровода: дефектов в виде малых очагов язвенной коррозии, а также трещин, поперечно ориентированных относительно оси трубопровода, с одновременно высокой разрешающей способностью, как в продольном, так и в поперечном направлениях трубопровода.
Эта задача решена системой ультразвукового контроля трубопровода, содержащей антенные решетки для возбуждения и приема ультразвуковых колебаний в стенках трубопровода, многоканальный генератор импульсов возбуждения, выходы которого подключены к антенным решеткам, многоканальный приемный тракт, связанный своими входами с антенными решетками, синхронизатор, подключенный выходом к многоканальному генератору импульсов возбуждения через шину передачи данных, вычислительный блок и датчик пути, установленные на транспортной платформе для перемещения вдоль трубопровода, а также блок отображения результатов контроля, при этом синхронизатор, многоканальный приемный тракт, датчик пути и блок отображения результатов контроля связаны через соответствующие шины обмена данными с вычислительным блоком, элементы антенных решеток имеют сухой точечный контакт с поверхностью трубопровода, а векторы колебательных смещений их протекторов ориентированы вдоль оси трубопровода, элементы каждой антенной решетки расположены в плане вдоль одной или нескольких линий, параллельных образующей трубопровода, причем расстояния между элементами выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода вдоль его оси, а расстояния между линиями элементов выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода поперек его оси, каждый выход многоканального генератора импульсов возбуждения непосредственно соединен с каждым соответствующим элементом антенных решеток и с соответствующим входом многоканального приемного тракта.
Частные случаи исполнения системы состоят в следующем:
- многоканальный генератор импульсов возбуждения состоит из дешифратора адресного кода данных синхронизатора и подключенных к выходам дешифратора одноканальных генераторов;
- каждый канал многоканального приемного тракта содержит последовательно соединенные ограничитель, усилитель и аналого-цифровой преобразователь;
- связь вычислительного блока с блоком отображения результатов контроля выполнена в виде стандартного кабельного интерфейса передачи данных или в виде стандартного интерфейса связи по радиоканалу, дополненного при необходимости устройствами для увеличения дальности связи;
- блок отображения результатов контроля выполнен в виде дисплея со вспомогательными блоками или в виде компьютера.
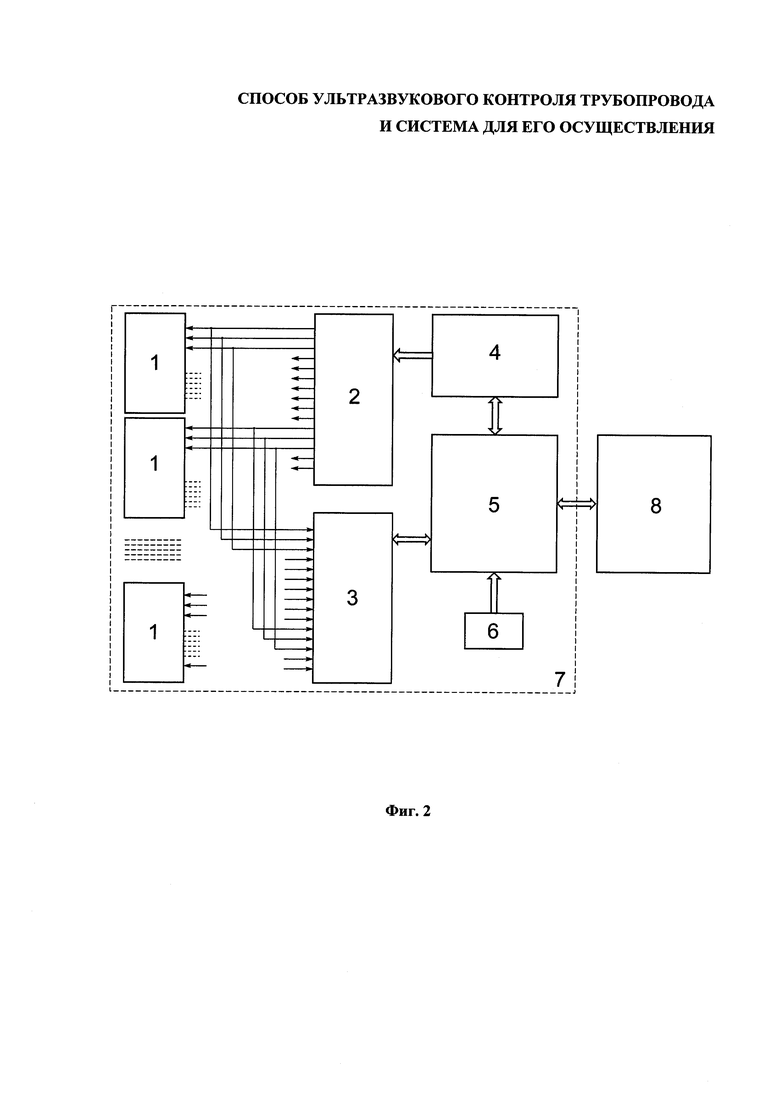
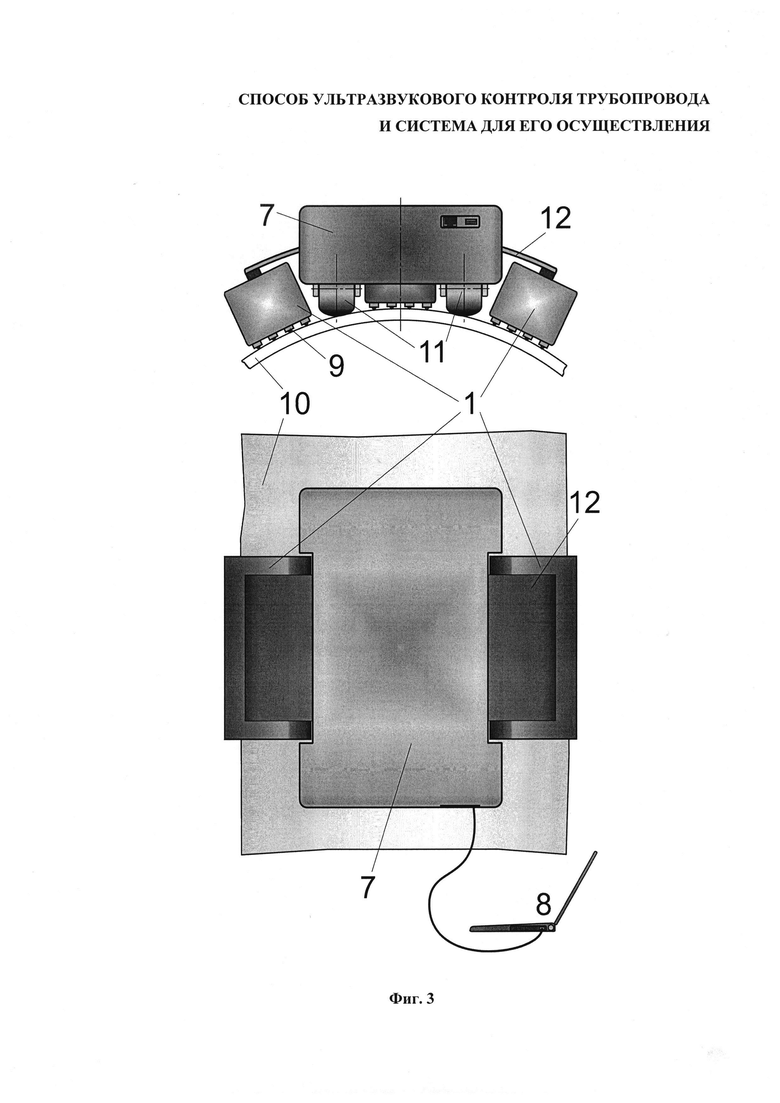
Функциональная схема системы УЗ контроля трубопровода представлена на фиг. 2, на фиг. 3 приведено изображение (фронтальное и сверху) одного из вариантов построения системы контроля трубопровода.
Система содержит антенные решетки 1 для возбуждения и приема ультразвуковых колебаний в стенках трубопровода, многоканальный генератор 2 импульсов возбуждения, каждый выход которого непосредственно соединен с каждым соответствующим элементом антенных решеток 1 и с соответствующим входом многоканального приемного тракта 3. Многоканальный генератор 2 импульсов возбуждения состоит из дешифратора адресного кода данных синхронизатора и подключенных к выходам дешифратора одноканальных генераторов. Каждый канал многоканального приемного тракта 3 состоит из последовательно соединенных ограничителя, усилителя и аналого-цифрового преобразователя.
Синхронизатор 4 подключен выходом к многоканальному генератору 2 импульсов возбуждения через шину передачи данных. Антенные решетки 1, многоканальный генератор 2 импульсов возбуждения, многоканальный приемный тракт 3, синхронизатор 4, вычислительный блок 5 и датчик пути 6 установлены на транспортной платформе 7 для перемещения вдоль трубопровода. Синхронизатор 4, многоканальный приемный тракт 3, датчик пути 6 и блок 8 отображения результатов контроля связаны через соответствующие шины обмена данными с вычислительным блоком 5.
Связь вычислительного блока 5 с блоком 8 отображения результатов контроля выполнена в виде стандартного кабельного интерфейса передачи данных или в виде стандартного интерфейса связи по радиоканалу, дополненного при необходимости устройствами для увеличения дальности связи. Блок 8 отображения результатов контроля выполнен в виде дисплея со вспомогательными блоками или в виде компьютера.
Элементы антенных решеток 1 имеют сухой точечный контакт с поверхностью трубопровода, а векторы колебательных смещений их протекторов ориентированы вдоль оси трубопровода.
Элементы каждой антенной решетки 1 расположены в плане вдоль одной или нескольких линий, параллельных образующей трубопровода, причем расстояния между элементами выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода вдоль его оси, а расстояния между линиями элементов выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода поперек его оси.
Антенная решетка может, в частности, быть одна, матричная. Она должна занимать некоторую область поверхности трубопровода. Но из конструктивных ограничений и условий контроля трубопроводов сравнительно малых диаметров целесообразно использовать несколько антенных решеток. В этом случае проще обеспечить акустический контакт всех элементов решеток с цилиндрической поверхностью трубопровода.
Система по фиг. 3 содержит три одинаковые антенные решетки 1, установленные на транспортной платформе 7, внутри которой находятся все основные электронные устройства системы: многоканальный генератор импульсов возбуждения, многоканальный приемный тракт, синхронизатор и вычислительный блок.
Каждый элемент 9 антенных решеток 1 контактирует с поверхностью трубопровода 10 через контактный наконечник. УЗ колебания передаются к ОК (трубопроводу 10) и обратно благодаря сухому точечному контакту. Вектор колебательных сил (и смещений) контактных наконечников всех элементов 9 антенных решеток 1 ориентирован по оси трубопровода 10. Вследствие такой ориентации колебательных сил в стенках трубопровода возбуждаются симметричные и антисимметричные нормальные волны Лэмба с максимумами излучения (и приема), направленные вдоль оси трубопровода 10, условно, вперед и назад. Кроме этих типов волн также возбуждаются поперечные нормальные волны с максимумами излучения (и приема), направленными поперек оси трубопровода 10 в обе стороны, условно, по часовой стрелке и против часовой стрелки.
Датчик пути 6 механически связан с осью одного из колес 11 транспортной платформы 7. В качестве блока 8 отображения результатов контроля используется компьютер, подключенный кабелем к вычислительному блоку системы.
Все элементы 9 антенных решеток 1 пронумерованы с первого до последнего так, как будто это одна решетка.
Каждая антенная решетка 1 состоит из тридцати двух элементов (4×8) с сухим точечным контактом. Две крайние антенные решетки 1 закреплены на гибкой рессоре 12, которая обеспечивает прижим элементов 9 решеток 1 к поверхности трубопровода 10. При установке системы внутри трубопровода рессора оказывается изогнутой в противоположную сторону относительно вида, показанного на фиг. 3, и также обеспечивает прижим антенных решеток 1 к трубопроводу 10. Колеса 11 установлены внутри транспортной платформы 7 с возможностью подпружиненного перемещения по вертикали, что позволяет устанавливать систему как снаружи трубопровода, так и внутри него. Каждый элемент 9 антенных решеток 1 установлен в корпусе решетки на подпружиненный подвес с возможностью небольшого возвратно-поступательного перемещения вдоль своей оси.
При использовании системы для внутритрубного контроля, когда система может удалиться от места ее загрузки на многие сотни метров, связь ее с блоком отображения результатов контроля по кабелю становится невозможной. В этом случае используется радиоканал связи, состоящий из двух приемо-передатчиков с антеннами и с Ethernet связями с вычислительным блоком системы на передающей стороне и с устройством отображения результатов контроля на приемной стороне. Кроме передачи изображений по этому каналу связи производится и подача различных команд системе от устройства отображения результатов контроля: команд начала и окончания движения, движения в обратном направлении, запуска сбора УЗ данных, проверки уровня напряжения питания и т.д.
Система работает следующим образом.
По сигналу от вычислительного блока 5 синхронизатор 4 генерирует числовой код для включения первого канала генератора 2 импульсов возбуждения и подает на генератор запускающий импульс. Генератор 2 дешифрирует входной код и первый канал генератора подает на первый элемент 9 антенных решеток 1 импульс возбуждения. Первый элемент возбуждает в металле трубопровода 10 УЗ колебания. От точки акустического контакта по стенкам распространяются импульсы УЗ нормальных волн.
Одновременно с посылкой зондирующего импульса начинается прием УЗ колебаний всеми каналами приемного тракта. Принятые каждым элементом 9 антенных решеток 1 УЗ колебания преобразуются в электрические сигналы, которые усиливаются в каждом канале, подвергаются преобразованию в цифровую форму и запоминаются в памяти вычислительного блока 5. Прием УЗ колебаний производится в интервале времени, в течение которого осуществляется прием эхосигналов от отражателей на разных дальностях, вплоть до наиболее удаленных от антенных решеток. Это удаление выбирается превышающим окружность трубопровода 10 с небольшим запасом. Запоминание реализаций УЗ сигналов происходит вместе с данными от датчика пути 6.
Далее этот процесс повторяется до окончания интервала приема УЗ колебаний от зондирующего импульса последнего элемента антенных решеток 1. Затем зондирование начинается снова с первого элемента решеток 1 и т.д. непрерывно при движении транспортной платформы 7 по трубопроводу 10.
Одновременно с процессом зондирования и приема УЗ колебаний происходит пространственно-временная обработка эхосигналов в принятых реализациях. Используется алгоритм, изложенный выше. Для хранения промежуточных данных в состав вычислительного блока 5 входит память. Кроме того, результирующее распределение отражающих способностей точек поверхности трубопровода формируется в памяти изображения, которое передается в блок 8 отображения результатов контроля. Там оно выводится на экран.
В соответствии с описанием изобретения реализуется система ультразвукового контроля трубопровода, которая работает по предлагаемому способу и имеет максимально возможную чувствительность к обнаружению малоразмерных и слабо отражающих дефектов в стенках металлического трубопровода: дефектов в виде малых очагов язвенной коррозии, а также трещин, поперечно ориентированных относительно оси трубопровода, с одновременно высокой разрешающей способностью, как в продольном, так и в поперечном направлениях трубопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| Способ ультразвукового контроля толщины стенки трубопровода | 2018 |
|
RU2687086C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ОБЪЕКТОВ ИЗ ТВЁРДЫХ МАТЕРИАЛОВ, УЛЬТРАЗВУКОВОЙ ВЫСОКОЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) И АНТЕННАЯ РЕШЁТКА С ПРИМЕНЕНИЕМ СПОСОБА | 2017 |
|
RU2657325C1 |
| Способ акустического контроля трубопровода | 2021 |
|
RU2758195C1 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЁТКА | 2016 |
|
RU2629894C1 |
| Способ акустического контроля трубопровода | 2024 |
|
RU2826796C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ СТЕПЕНИ ПОВРЕЖДЕННОСТИ МЕТАЛЛОВ КОНТЕЙНЕРОВ | 2015 |
|
RU2614186C1 |
| Способ ультразвуковой дефектоскопии трубопровода | 2024 |
|
RU2834582C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458342C1 |
| Способ определения акустической плотности | 2017 |
|
RU2657314C1 |
Использование: для ультразвукового (УЗ) неразрушающего контроля протяженных металлических изделий. Сущность изобретения заключается в том, что при перемещении вдоль трубопровода периодически возбуждают УЗ колебания в заданной области внешней или внутренней его поверхности, связанной с диагностическим устройством, принимают из этой же области реализации УЗ колебаний от акустических нормальных волн, отраженных от различных нарушений сплошности материала стенок, и в результате обработки принятых реализаций определяют распределение дефектов в стенках трубопровода, при этом возбуждают УЗ колебания касательными к поверхности трубопровода колебательными силами акустических контактов приемно-излучающих элементов диагностического устройства поочередно в каждой точке, а прием колебаний осуществляют одновременно во всех точках в пределах указанной области в выбранном интервале времени, и из реализаций УЗ колебаний, принятых во всех точках поверхности трубопровода при перемещении вдоль него, по предварительно рассчитанным временам задержки для всех типов акустических нормальных волн выбирают эхосигналы от каждой точки поверхности стенок, когерентно суммируют их для каждой точки поверхности отдельно для каждого типа волн, вычисляют амплитуды суммарных сигналов и строят нормированные распределения этих амплитуд в соответствии с координатами точек поверхности стенок трубопровода отдельно для каждого типа акустических волн, после чего составляют одно распределение величины, значения которой равны максимальным значениям амплитуд суммарных сигналов от разных типов акустических волн для совпадающих по координатам точек поверхности стенок трубопровода, и по этому распределению судят о наличии и величине дефектов в стенках трубопровода. Технический результат: обеспечение возможности обнаружения малоразмерных и слабо отражающих дефектов в стенках трубопровода. 2 н. и 8 з.п. ф-лы, 3 ил.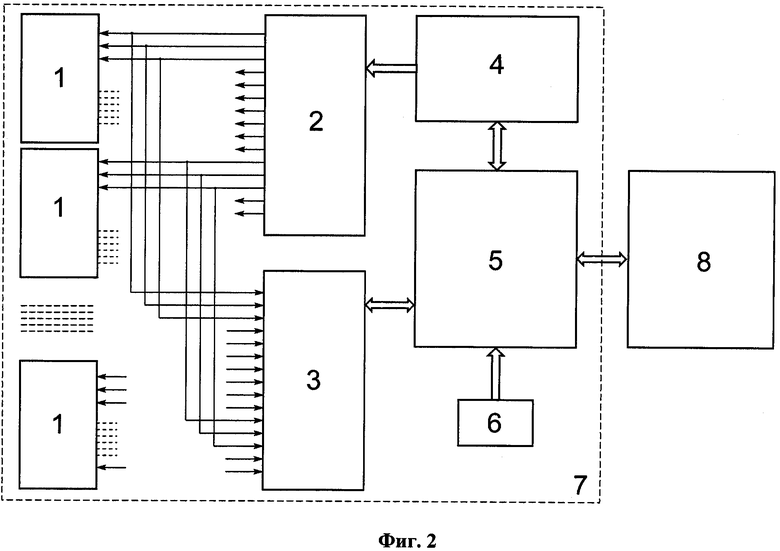
1. Способ ультразвукового контроля трубопровода, согласно которому при перемещении вдоль трубопровода периодически возбуждают ультразвуковые колебания в пределах заданной области его поверхности, связанной с диагностическим устройством, в выбранном интервале времени принимают из этой же области реализации ультразвуковых колебаний от акустических нормальных волн, прошедших по стенкам трубопровода и отраженных от различных нарушений сплошности материала стенок, и с помощью совместной обработки принятых реализаций ультразвуковых колебаний определяют распределение дефектов в стенках трубопровода, отличающийся тем, что возбуждение и прием ультразвуковых колебаний осуществляют в нескольких точках, соответствующих расположению акустических контактов приемно-излучающих элементов диагностического устройства в указанной области внешней или внутренней поверхностей трубопровода, возбуждение ультразвуковых колебаний производят касательными к поверхности трубопровода колебательными силами поочередно в каждой точке, а прием колебаний осуществляют одновременно во всех точках в пределах указанной области, причем принимают реализации колебаний ото всех основных типов акустических нормальных волн, распространяющихся по стенкам трубопровода во все стороны от точек возбуждения ультразвуковых колебаний, и из реализаций колебаний, принятых во всех точках поверхности трубопровода при перемещении вдоль него, по предварительно рассчитанным временам задержки для всех типов акустических нормальных волн выбирают эхосигналы от каждой точки поверхности стенок, когерентно суммируют их для каждой точки поверхности отдельно для каждого типа волн, вычисляют амплитуды суммарных сигналов и строят нормированные распределения этих амплитуд в соответствии с координатами точек поверхности стенок трубопровода отдельно для каждого типа акустических волн, после чего составляют одно распределение величины, значения которой равны максимальным значениям амплитуд суммарных сигналов от разных типов акустических волн для совпадающих по координатам точек поверхности стенок трубопровода, и по этому распределению судят о наличии и величине дефектов в стенках трубопровода.
2. Способ по п. 1, отличающийся тем, что принимают реализации колебаний симметричной волны Лэмба нулевого порядка.
3. Способ по п. 1, отличающийся тем, что принимают реализации колебаний антисимметричной волны Лэмба нулевого порядка.
4. Способ по п. 1, отличающийся тем, что принимают реализации колебаний поперечной нормальной волны нулевого порядка.
5. Способ по п. 1, отличающийся тем, что времена задержки вычисляют, используя заданные координаты расположения акустических контактов элементов диагностического устройства и координаты отражающих точек на поверхности трубопровода, заданные с определенным шагом по двумерной сетке на поверхности трубопровода, и известные групповые и фазовые скорости распространения акустических нормальных волн в стенках трубопровода.
6. Система ультразвукового контроля трубопровода, содержащая антенные решетки для возбуждения и приема ультразвуковых колебаний в стенках трубопровода, многоканальный генератор импульсов возбуждения, выходы которого подключены к антенным решеткам, многоканальный приемный тракт, связанный своими входами с антенными решетками, синхронизатор, подключенный выходом к многоканальному генератору импульсов возбуждения через шину передачи данных, вычислительный блок и датчик пути, установленные на транспортной платформе для перемещения вдоль трубопровода, а также блок отображения результатов контроля, при этом синхронизатор, многоканальный приемный тракт, датчик пути и блок отображения результатов контроля связаны через соответствующие шины обмена данными с вычислительным блоком, отличающаяся тем, что элементы антенных решеток имеют сухой точечный контакт с поверхностью трубопровода, а векторы колебательных смещений их протекторов ориентированы вдоль оси трубопровода, элементы каждой антенной решетки расположены в плане вдоль одной или нескольких линий, параллельных образующей трубопровода, причем расстояния между элементами выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода вдоль его оси, а расстояния между линиями элементов выбраны, исходя из интервала пространственной корреляции акустических шумов трубопровода поперек его оси, каждый выход многоканального генератора импульсов возбуждения непосредственно соединен с каждым соответствующим элементом антенных решеток и с соответствующим входом многоканального приемного тракта.
7. Система по п. 6, отличающаяся тем, что многоканальный генератор импульсов возбуждения состоит из дешифратора адресного кода данных синхронизатора и подключенных к выходам дешифратора одноканальных генераторов.
8. Система по п. 6, отличающаяся тем, что каждый канал многоканального приемного тракта содержит последовательно соединенные ограничитель, усилитель и аналого-цифровой преобразователь.
9. Система по п. 6, отличающаяся тем, что связь вычислительного блока с блоком отображения результатов контроля выполнена в виде стандартного кабельного интерфейса передачи данных или в виде стандартного интерфейса связи по радиоканалу, дополненного при необходимости устройствами для увеличения дальности связи.
10. Система по п. 6, отличающаяся тем, что блок отображения результатов контроля выполнен в виде дисплея со вспомогательными блоками или в виде компьютера.
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| Цветовой пирометр | 1960 |
|
SU136576A1 |
| УСТРОЙСТВО И БЛОК ДАТЧИКОВ ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДА С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВЫХ ВОЛН ДВУХ РАЗНЫХ ТИПОВ | 2008 |
|
RU2485388C2 |
| Способ изготовления оригиналов чертежей карандашом для светокопирования | 1952 |
|
SU102810A2 |
| EP 0775910 A1, 28.05.1997 | |||
| JP 2000146921 A, 26.05.2000. | |||

